1. Introduction
With the rapid development of unmanned driving and intelligent assisted driving technology, the vehicle-mounted laser LiDAR, which serves as an important sensor for vehicle intelligent perception systems, is generating increasing interest. Vehicle-mounted LiDAR lasers have historically been split between three camps: the solid-state LiDAR, the mechanical rotating LiDAR, and MEMS-based torsional LiDAR. Solid-state LiDAR does not require rotating mechanical parts and has the advantage of being maintenance free and high resolution. However, its high price prevents solid-state LiDAR from being widely used. Tiny micromirrors are used to reflect the laser from the laser source in MEMS-based LiDAR; omni-directional scanning can be realized through the motion of the micromirror. MEMS-based LiDAR has numerous advantages, including small volume and low cost. As the main components of MEMS-based LiDAR, based on different actuation methods, MEMS micromirrors can be divided into four main types: electromagnetic [
1], piezoelectric [
2], electrothermal [
3], and electrostatic [
4]. Due to the advantages of having a large driving force, small driving voltage, and wide scanning range, the electromagnetic MEMS torsional micromirror is also an important optical device for the development of advanced MEMS-based LiDAR [
5,
6].
Ji [
7] designed an addressable 4 × 4 array of micromirrors which was capable of providing up to 90° of angular deflection; the designed structure can be used in microphotonic applications. In 2007, Ji [
8] designed a new electromagnetic scanning micromirror which is actuated by a radial magnetic field; this scanner can be used in raster scanning laser display systems. In 2009, Cho [
9] designed a new three-axis electromagnetically-actuated micromirror, which has a low voltage and high coupling efficiency. Yeow [
10] first designed and manufactured an electromagnetic MEMS micromirror based on hard magnetic material. Jiang [
11] designed a micromirror structure with embedded coils. When the depth of the coils increased, the design has the potential to achieve larger driven forces.
Though the electromagnetic MEMS torsional micromirror can solve the problems of LiDAR miniaturization and cost, other problems still need to be solved urgently. As a vehicle-mounted instrument, the MEMS micromirror is seriously impacted by vibration originating from the vehicle body due to the rolling road surface, and the resonance of the micromirror can disturb the predefined motion trajectory of MEMS micromirror itself.
Iskiman et al. [
12] presented a dynamic model of MEMS micromirrors driven by soft magnetic thin film, and in this paper, the working principle and electromagnetic force were discussed in detail. Qin et al. [
13] carried out mathematical modeling and analysis on another MEMS micromirror driven by hard magnetic materials. To better control the deflection of the micromirror, Tan et al. [
14] proposed a nonlinear model based-angular control strategy for electromagnetically actuated micromirrors. Cao et al. [
15] proposed a data-driven modeling method for electromagnetically actuated micromirrors in a random noisy environment; the electromagnetic micromirror is considered a dynamic system with preceded hysteresis. However, existing research has focused on the static model of the MEMS micromirror, and a dynamic model of the micromirror under vibrational disturbance is still required.
To further improve the performance of the electromagnetic MEMS torsional micromirror, many scholars have studied the control method of the MEMS micromirror, which is essential for a satisfactory performance. In 2000, Pannue [
16] successfully applied the proportion-integral-derivative (PID) control method to the electromagnetic MEMS micromirror, which effectively improved its dynamic response performance. Zhou et al. [
17] introduced a sliding mode control based on exponential switching law, and simulation experiments proved that this strategy can effectively reduce the response time of the micromirror. At the same time, Chen et al. [
18] designed an integral sliding mode control algorithm, and their experimental results proved that this strategy can achieve high precision tracking of triangle and sine waves. Compared with the PID control algorithm, the integral sliding mode control algorithm has more advantages. Considering the problem of input saturation, Tan et al. [
19] designed a controller based on composite nonlinear feedback and the integral sliding mode technique, which can achieve precise positioning with a satisfactory transient performance compared with the open-loop’s performance. Based on the internal principle, a robust controller was designed in Tan’s work [
20].
After investigating the literature, we found that the control research of electromagnetic MEMS micromirrors has been performed under the static state of the micromirror itself; however, due to the lack of research on dynamic modeling of the MEMS micromirror with external vibration, the performance of control methods under realistic disturbance conditions has not been evaluated.
In this paper, we proposed a dynamic coupling model of the MEMS micromirror considering external vibration, and an experimental method is used to identify the coefficients in the dynamic coupling model. The structure of this paper is as follows. In
Section 1, the background of the electromagnetic MEMS torsional micromirror is introduced, including its modeling and control.
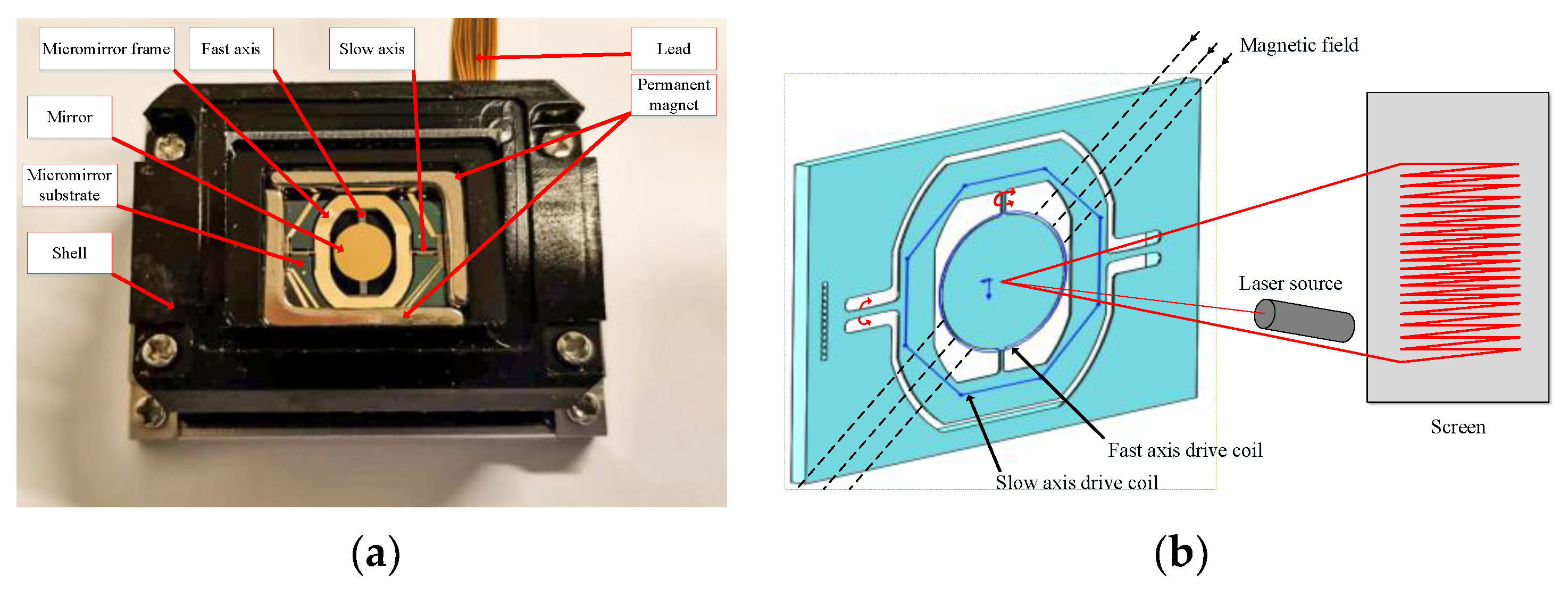
Section 2 introduces the dynamic model of the electromagnetic MEMS torsional micromirror, including the working principle of the MEMS micromirror and the dynamic model considering external vibration.
Section 3 introduces the anti-disturbance controller design. Conclusions are drawn in
Section 4.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}