
Control and Signal Acquisition System of Broad-Spectrum Micro-Near-Infrared Spectrometer Based on Dual Single Detector

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
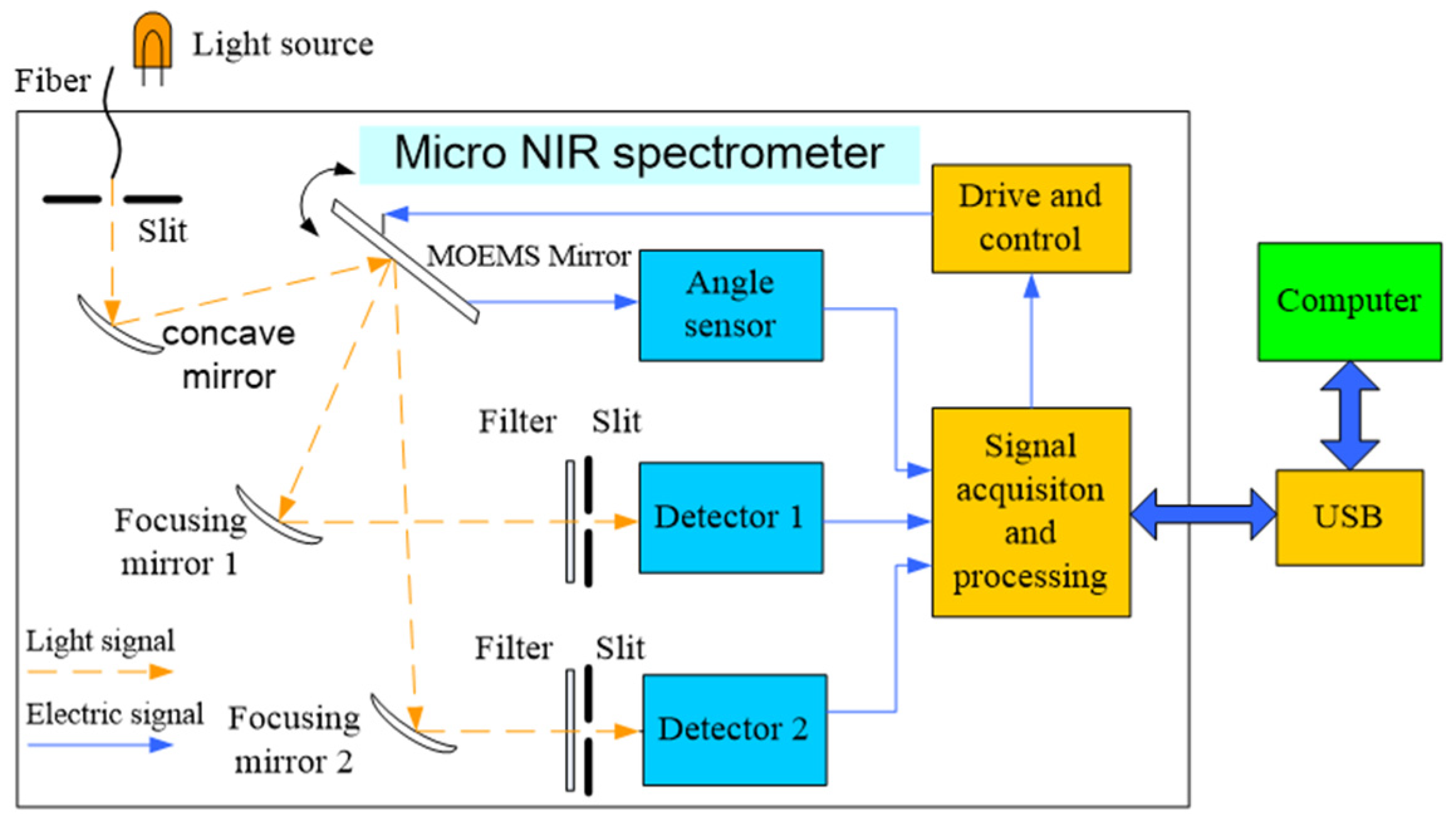
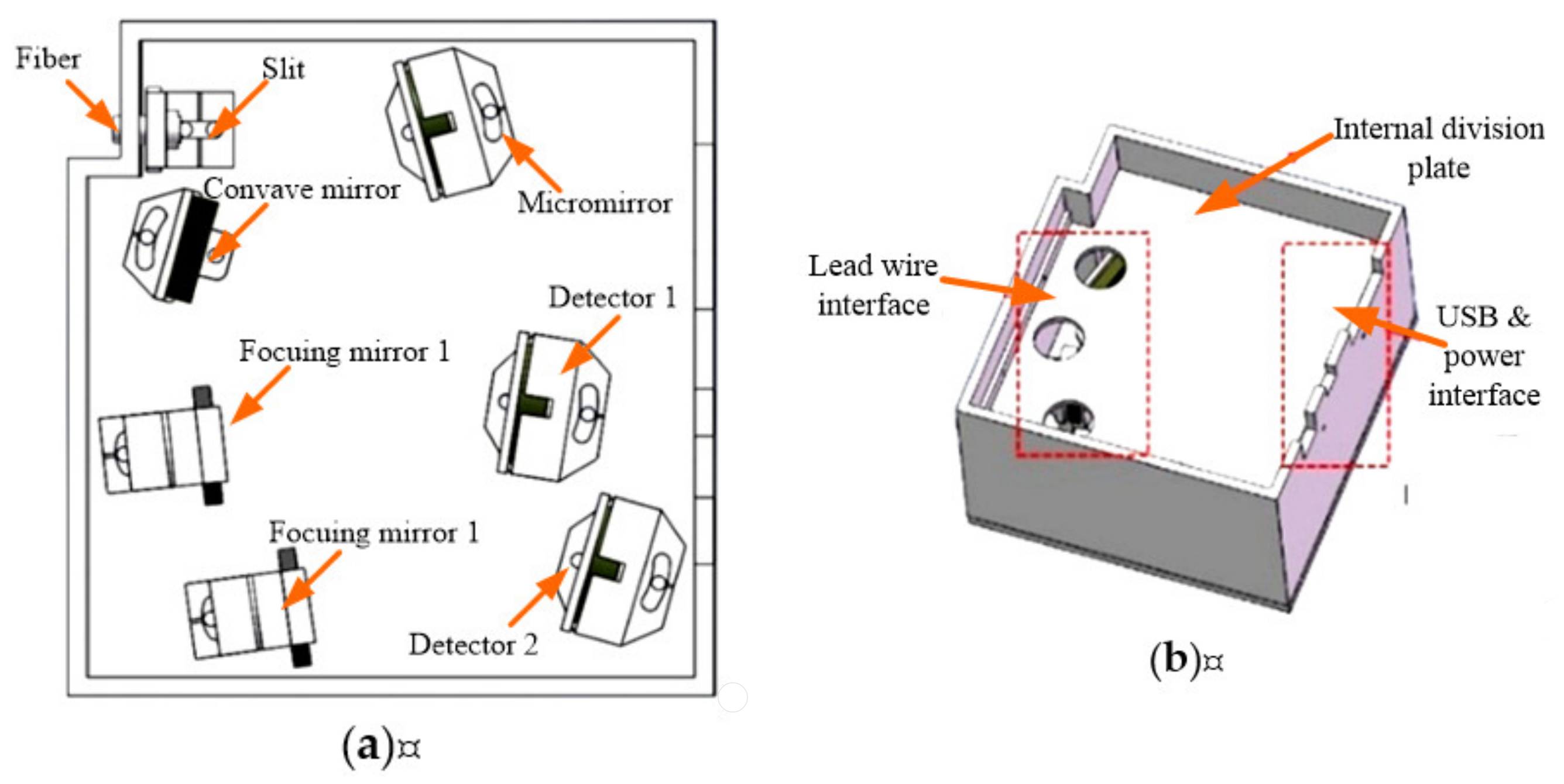
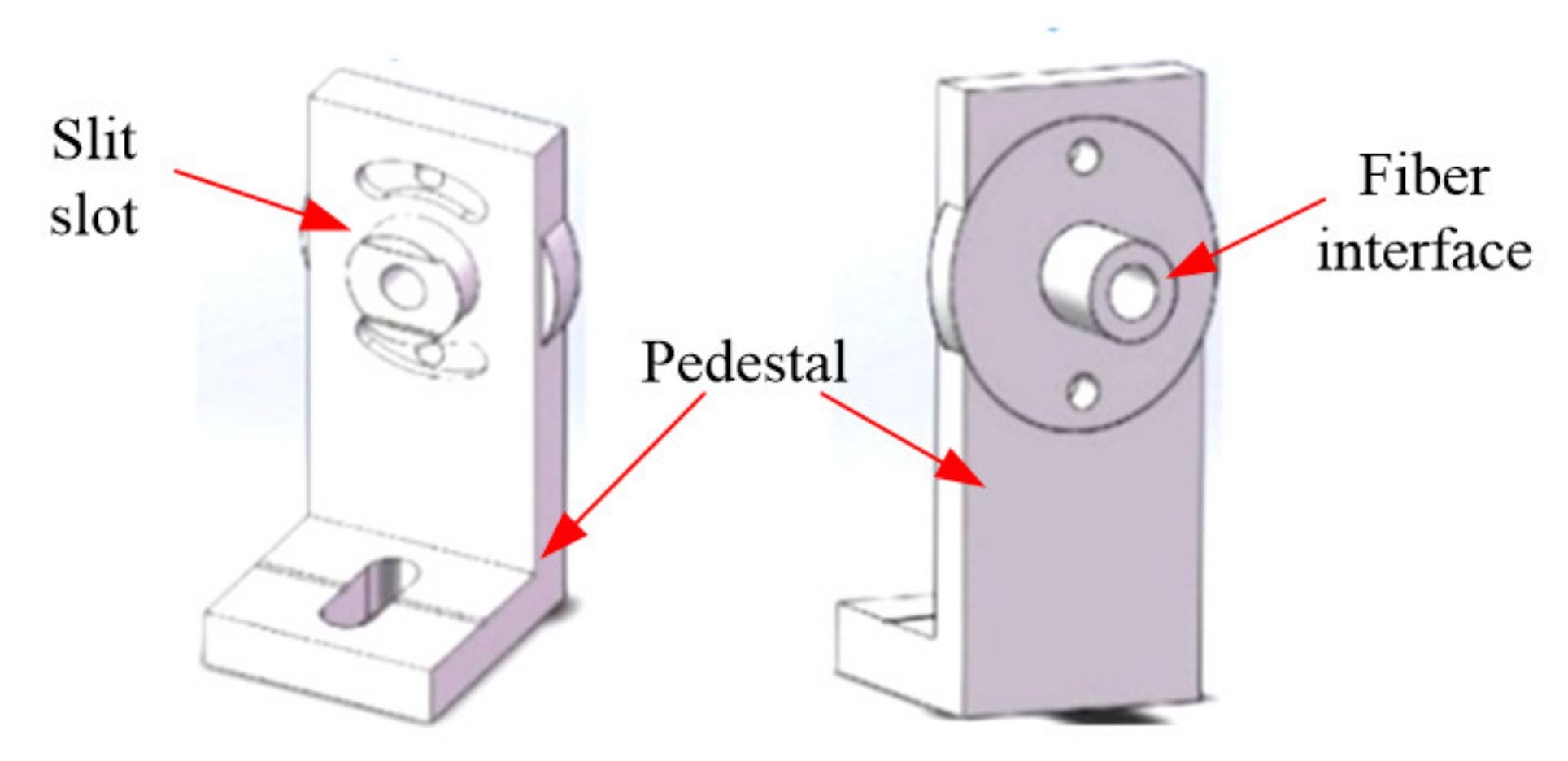
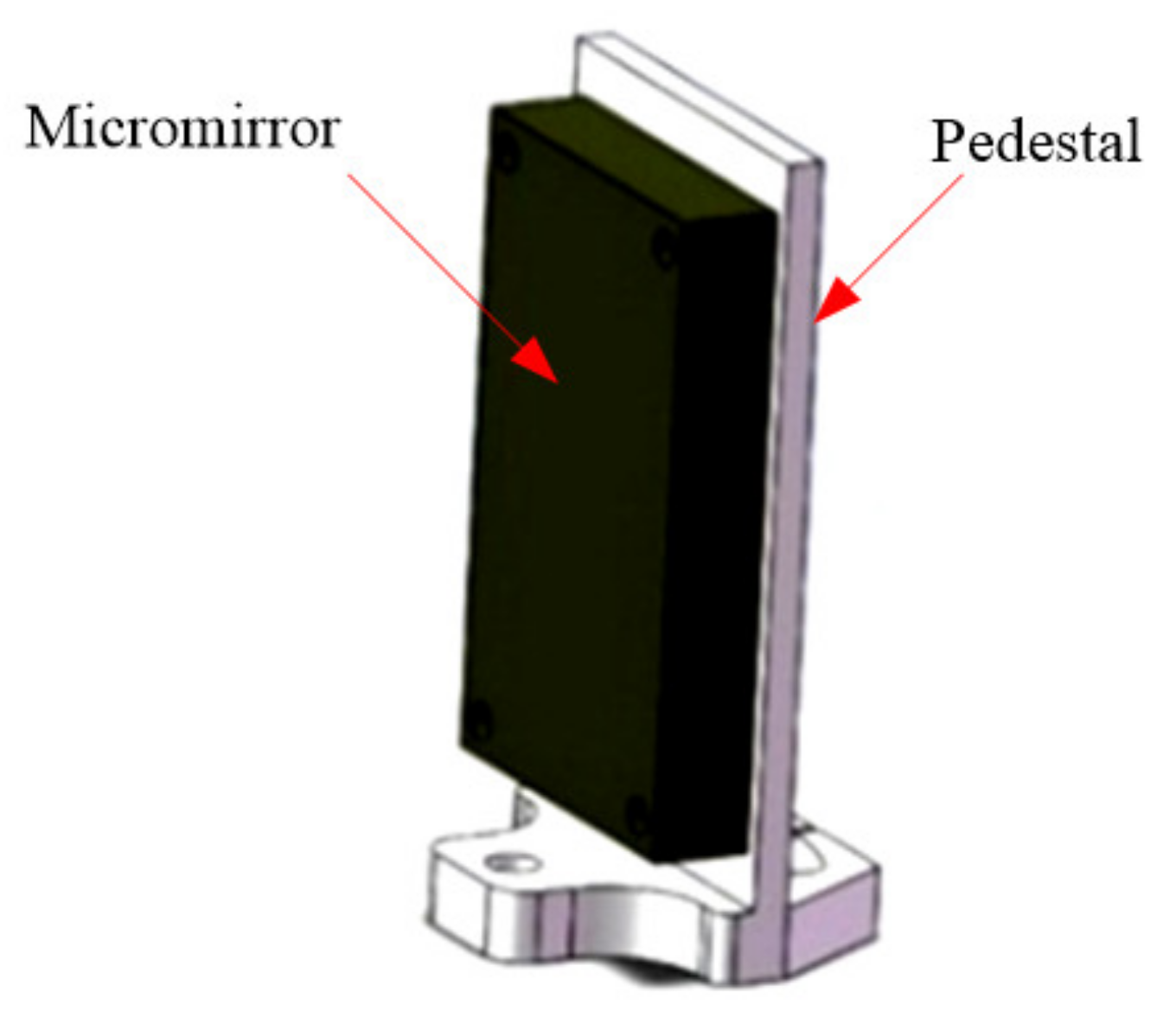
2. Principle of System Structure
3. Circuits and Algorithm Design
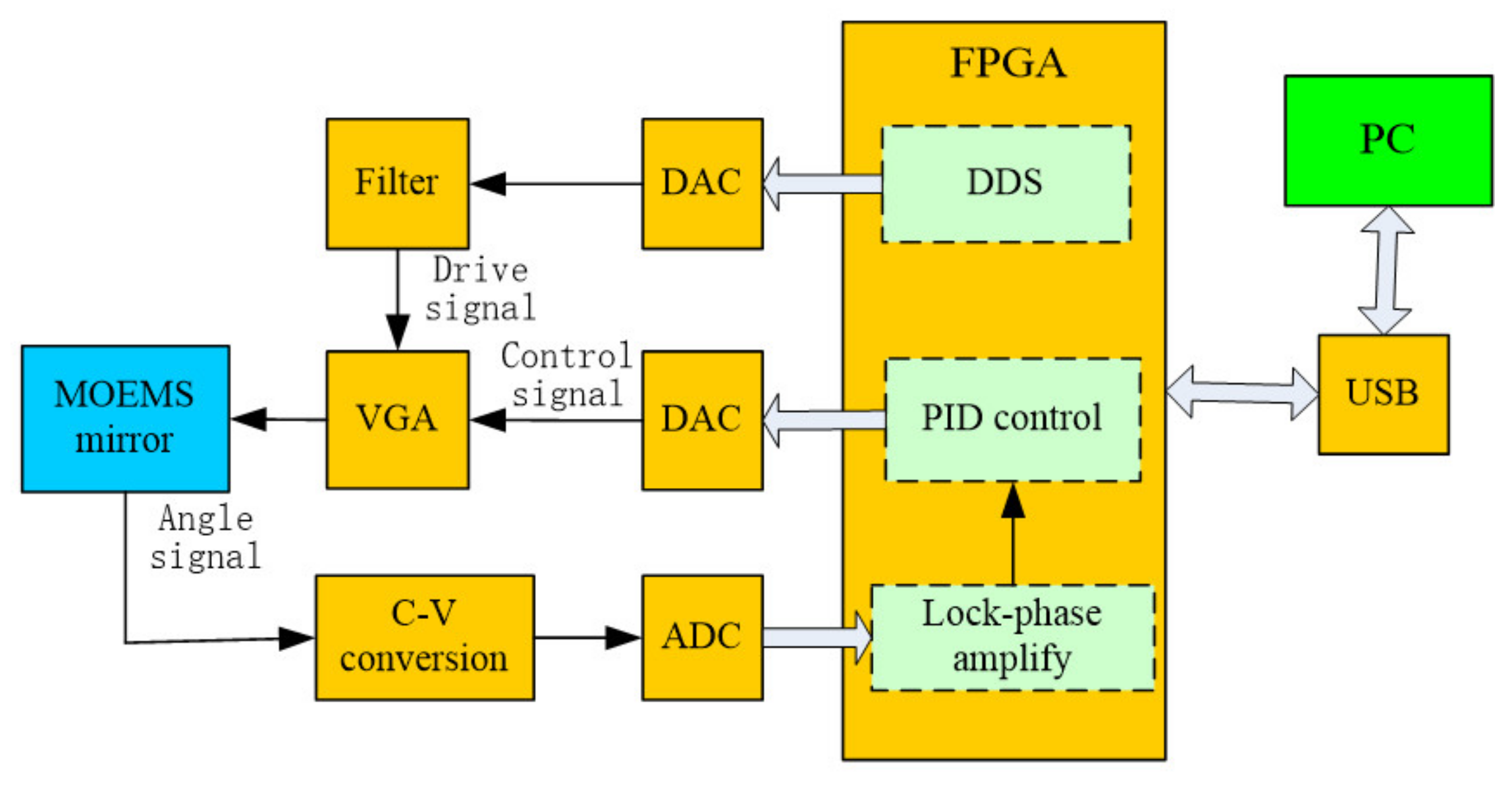
3.1. Mirror Control System (Drive and Closed-Loop Feedback Control System)
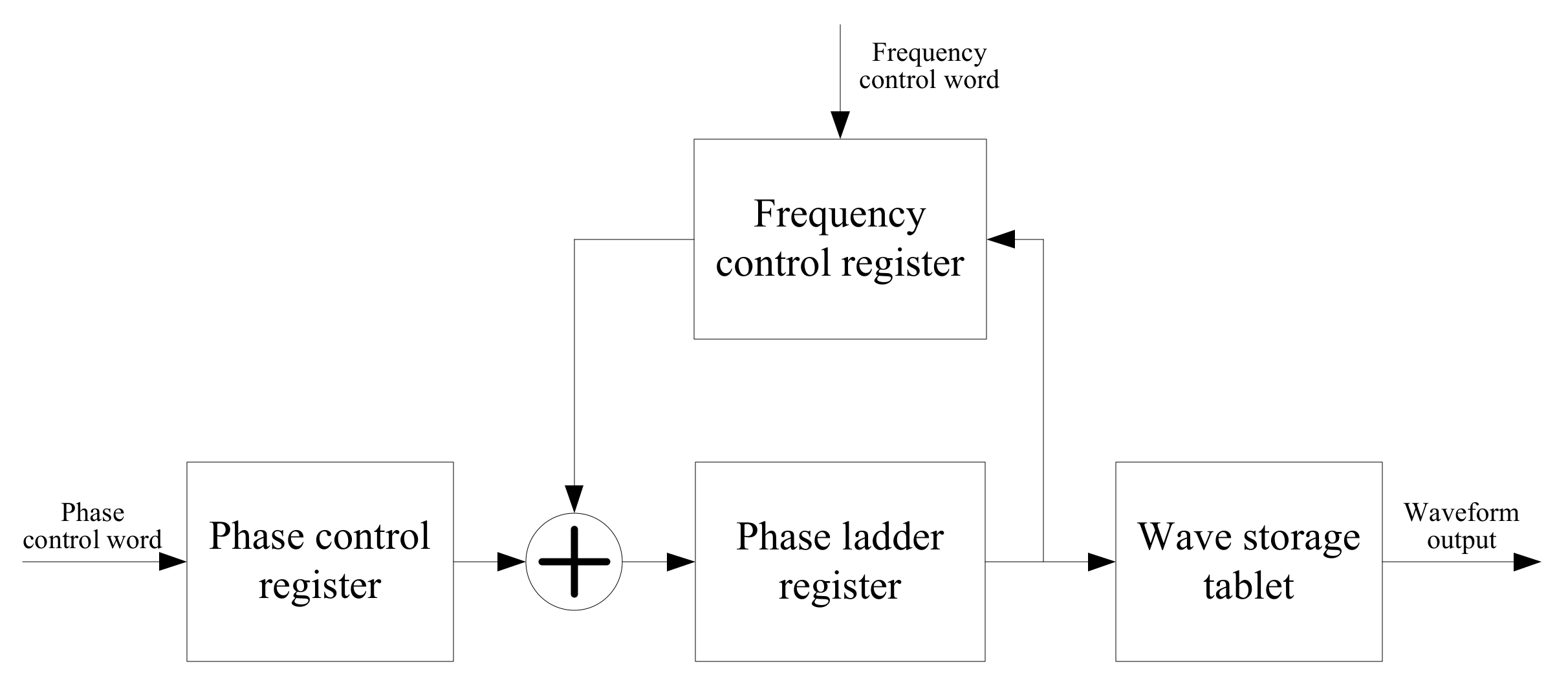
3.1.1. The Drive Signal Generation Module Based on DDS
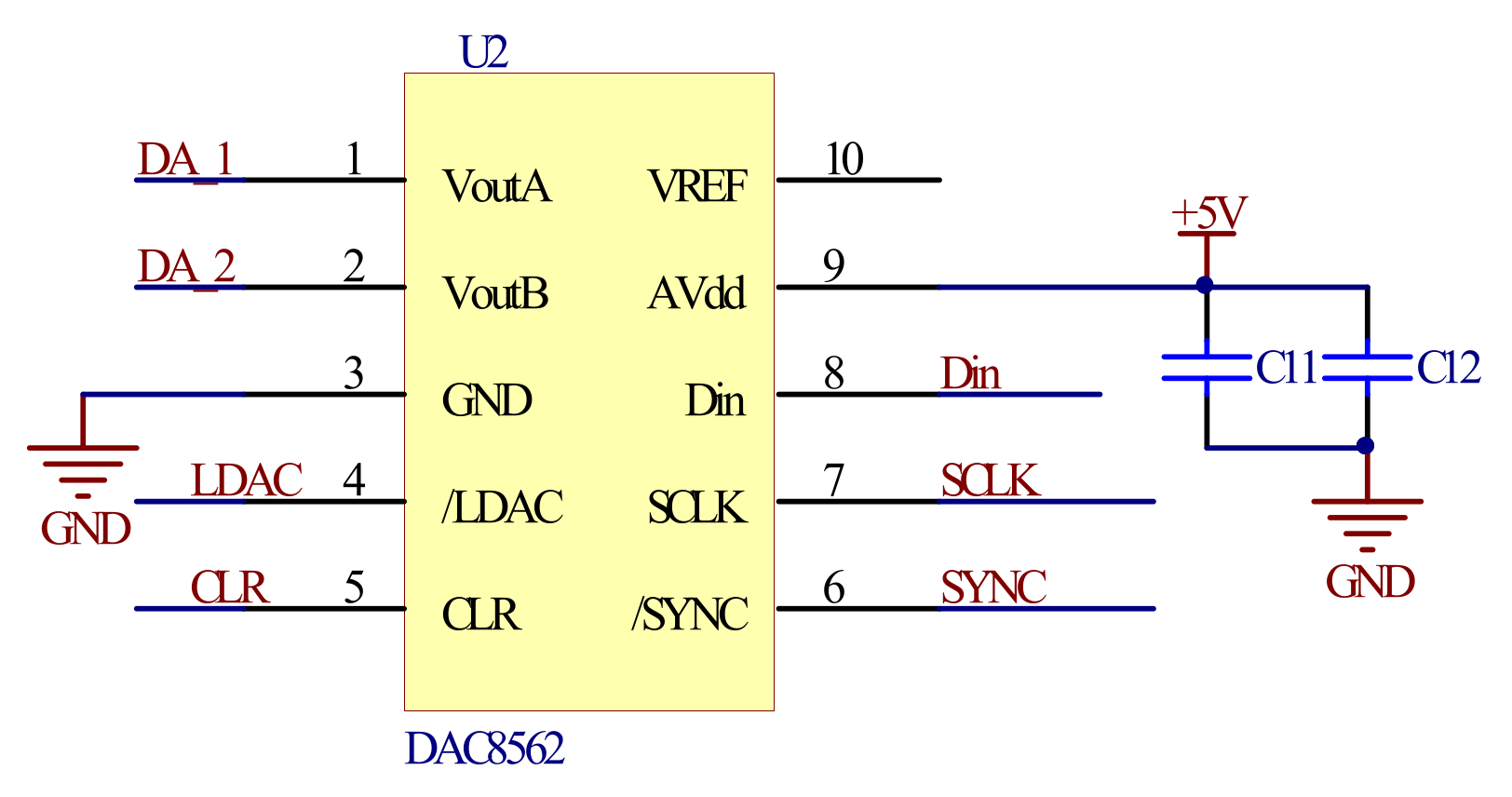
3.1.2. DAC and Low Pass Filter Circuit
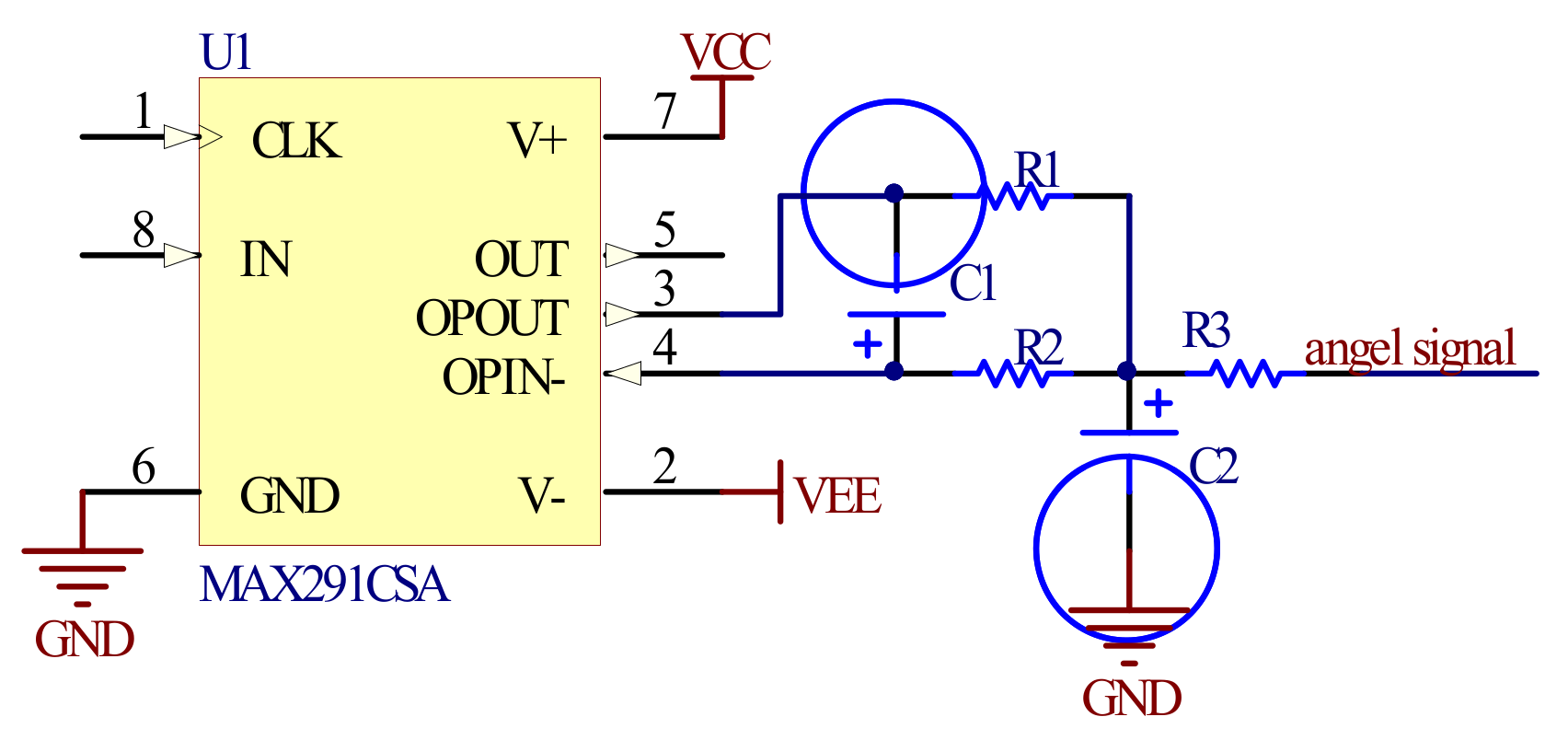
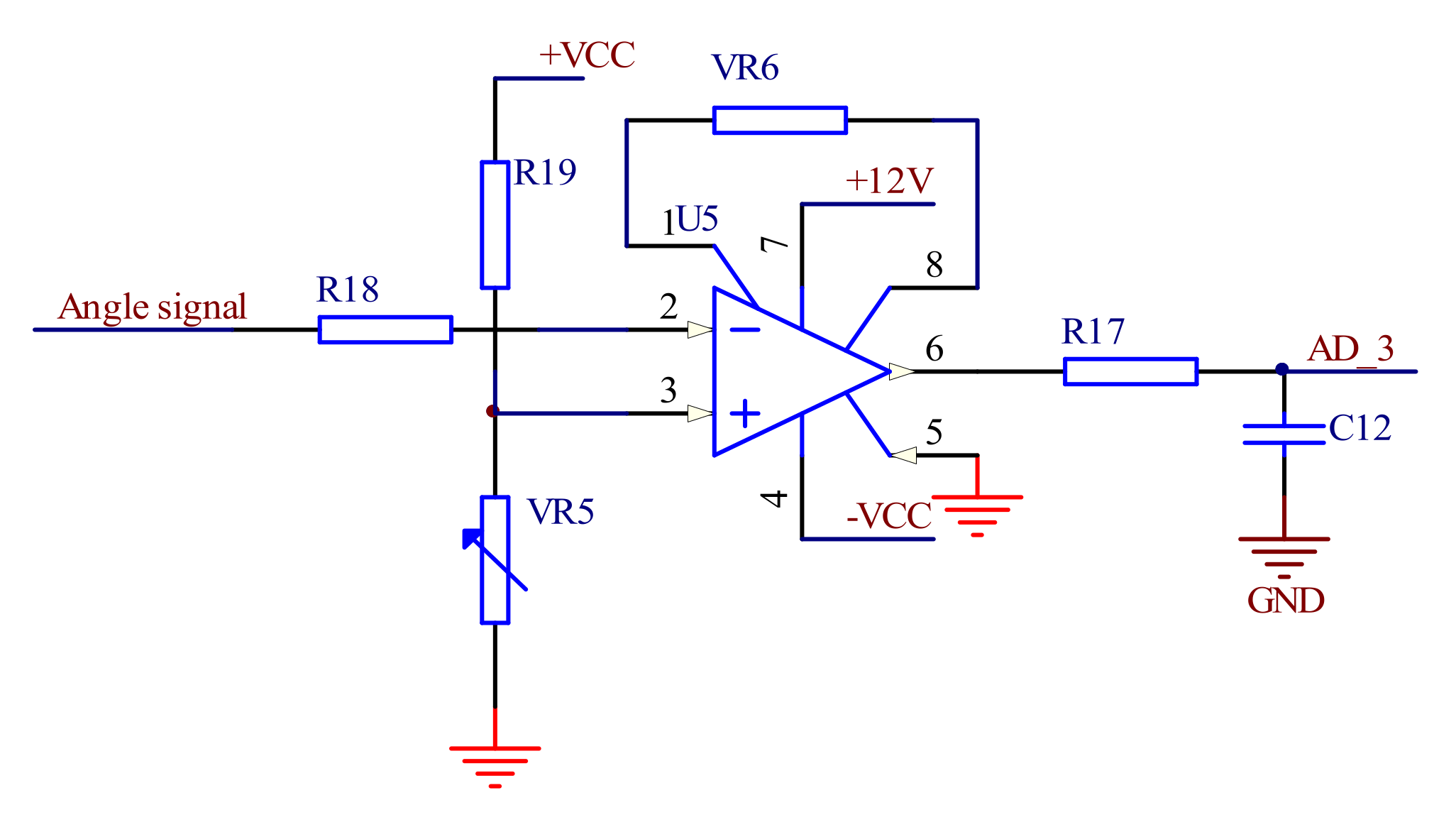
3.1.3. Angle Sensing Signal Preprocessing
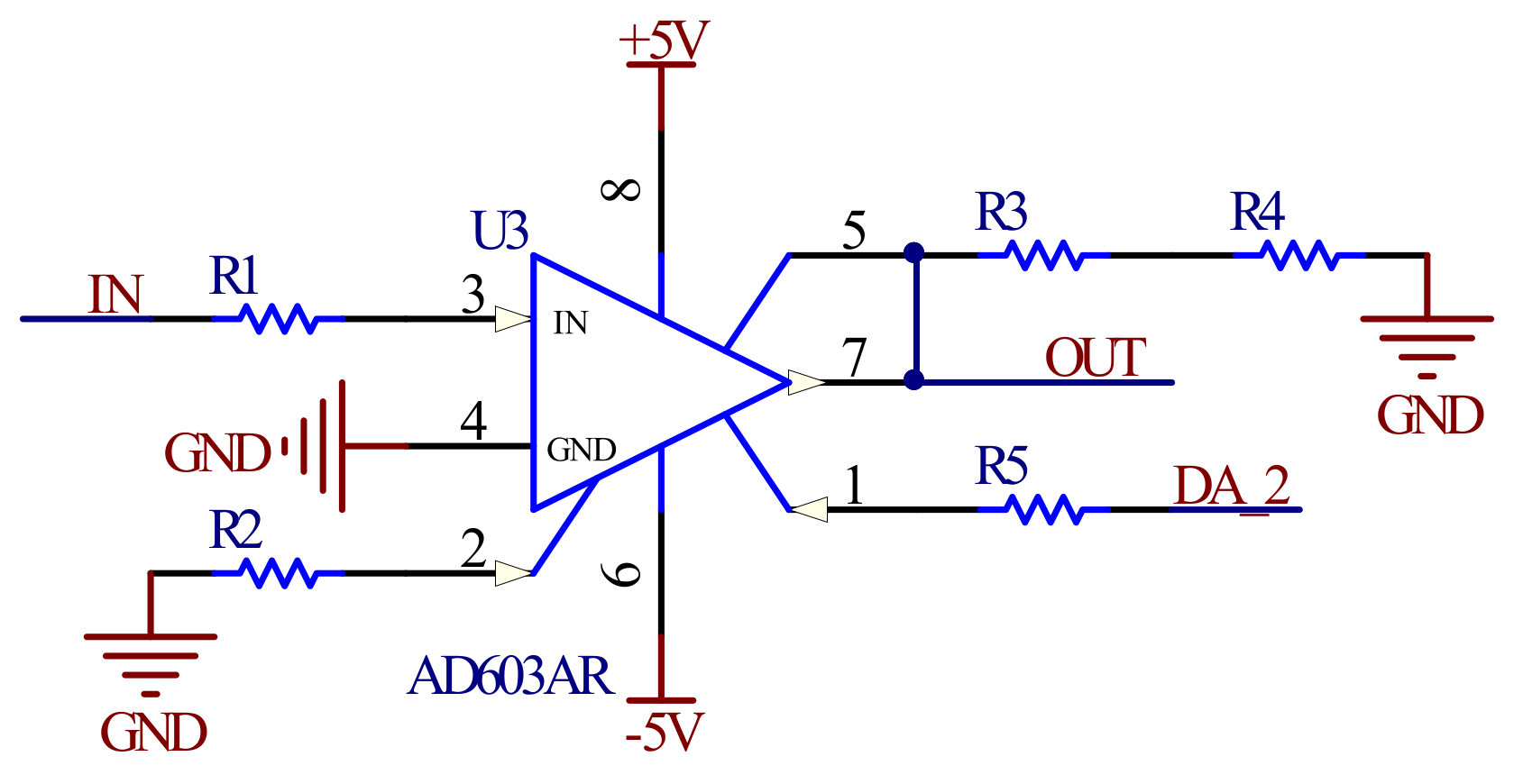
3.1.4. Automatic Gain Circuit
3.1.5. PID Control Algorithm
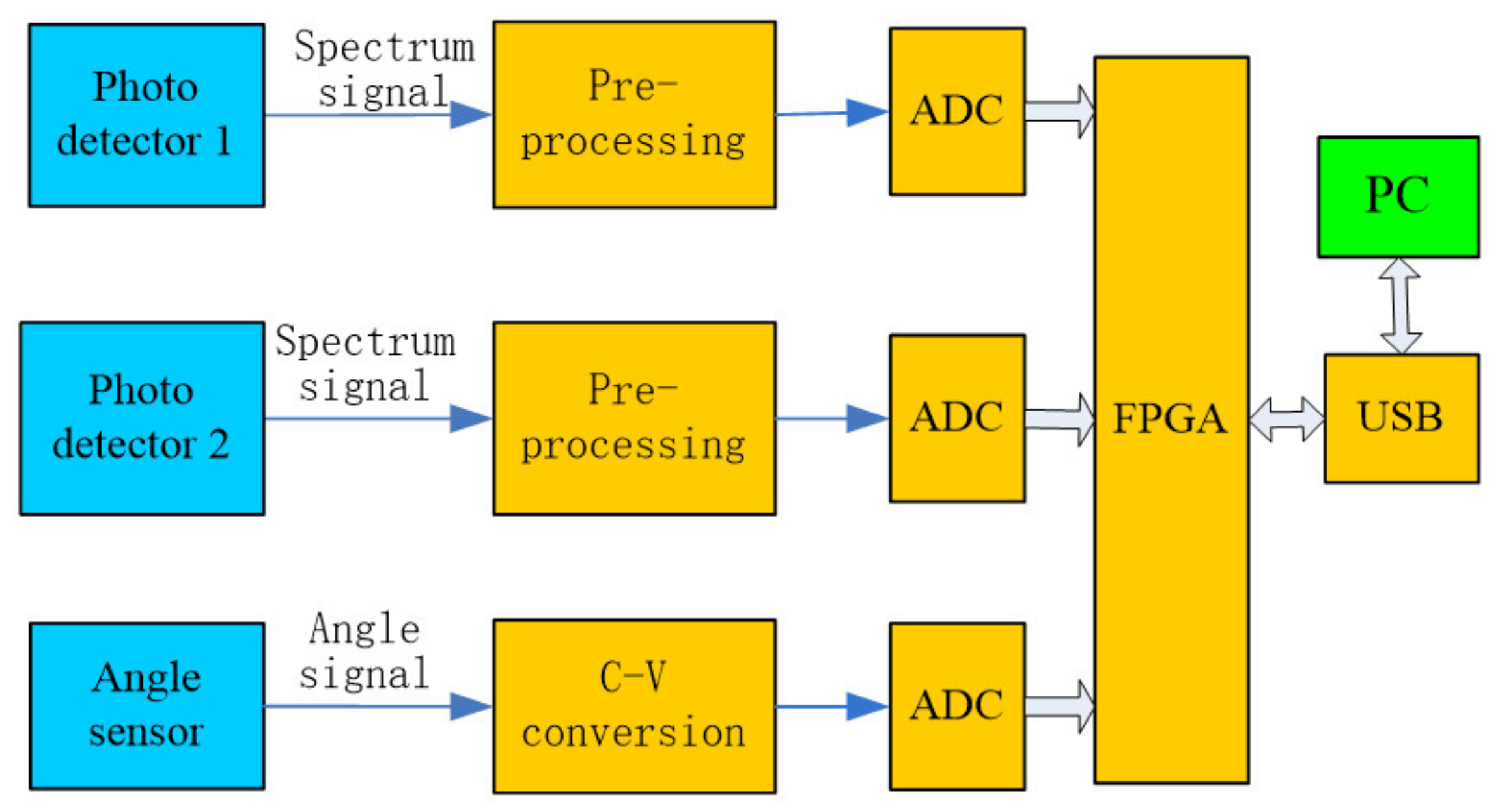
3.2. Signal Acquisition and Processing System
3.2.1. Detector Signal Acquisition
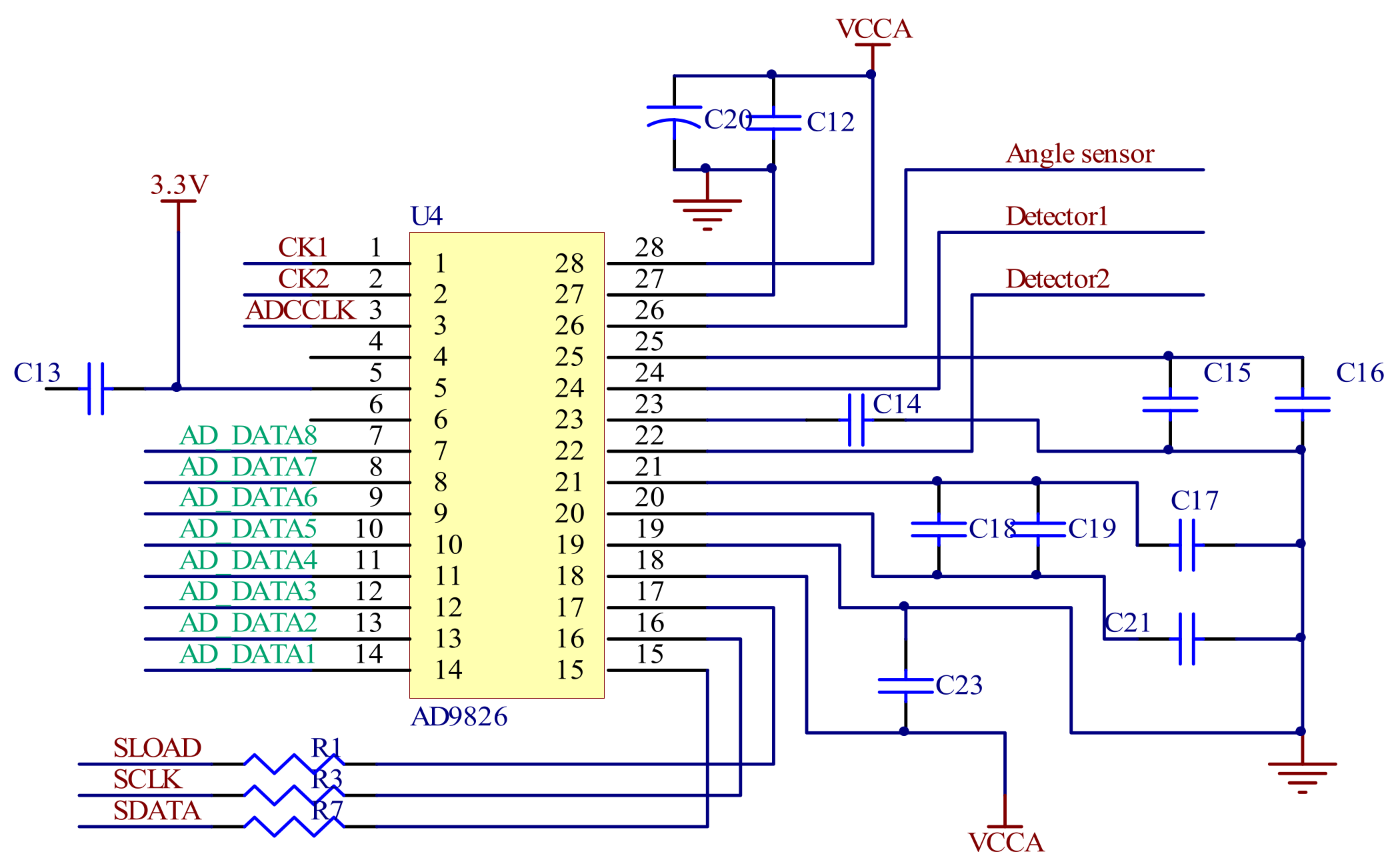
3.2.2. ADC Module
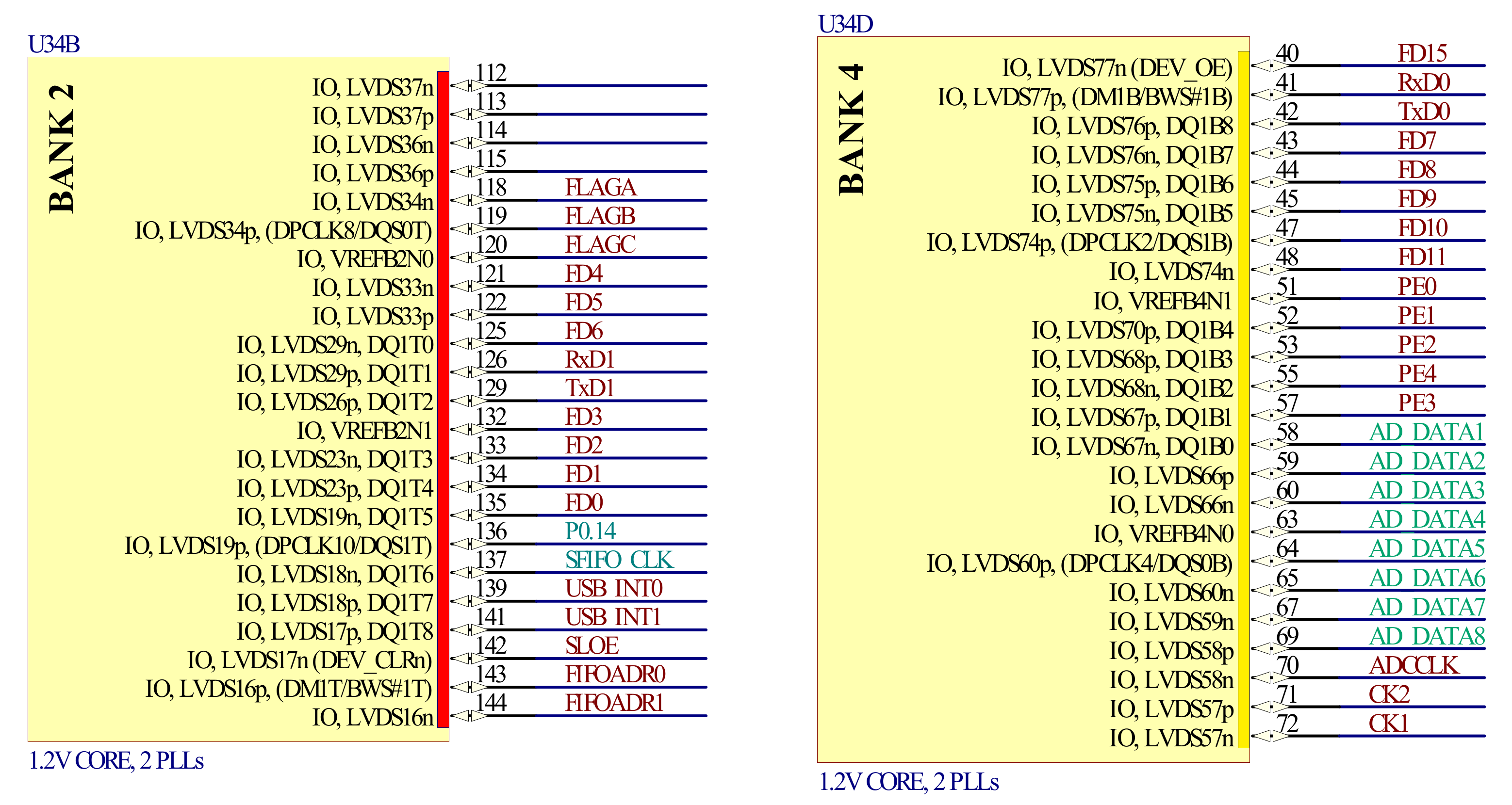
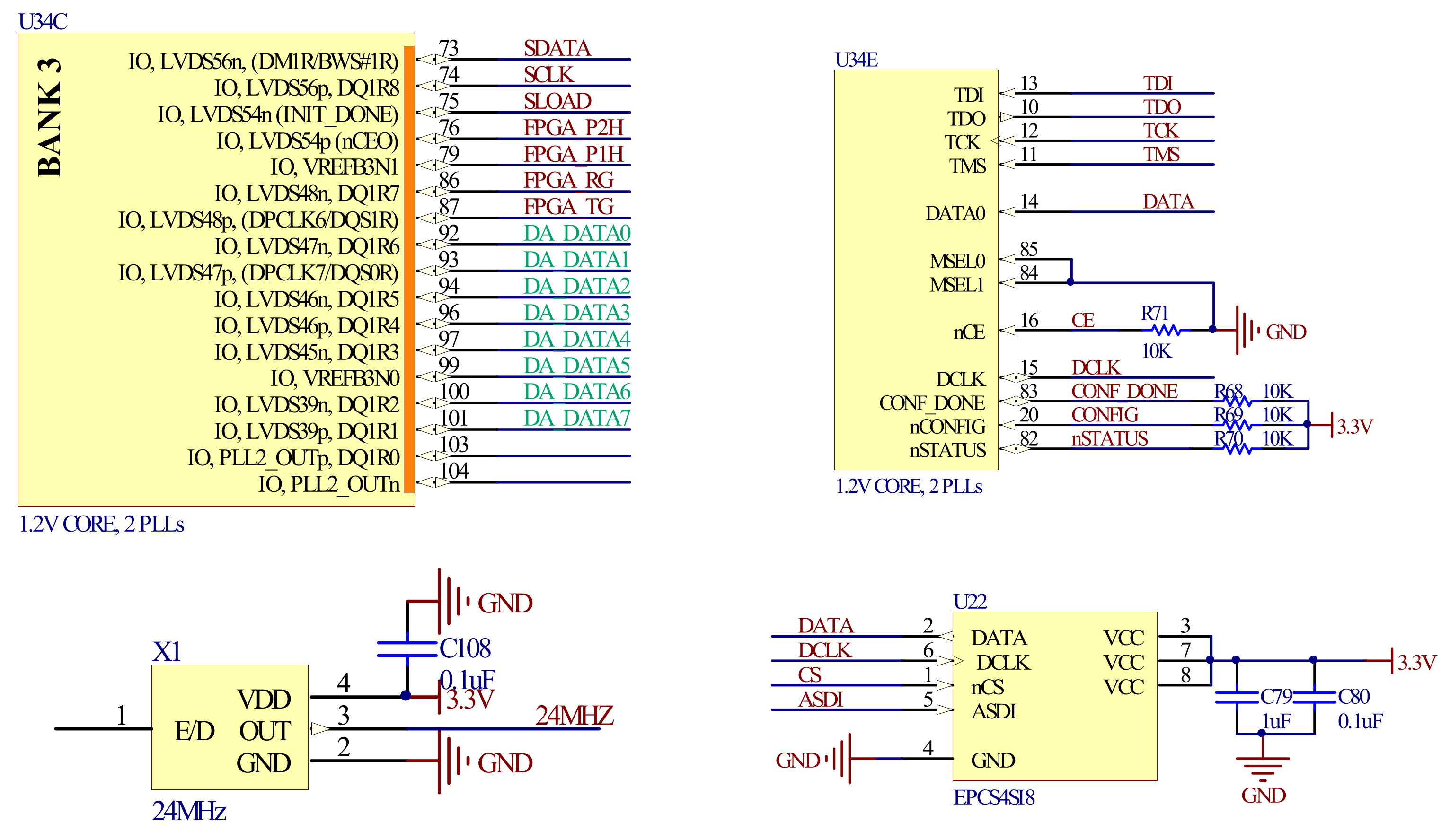
3.2.3. FPGA Main Control Module
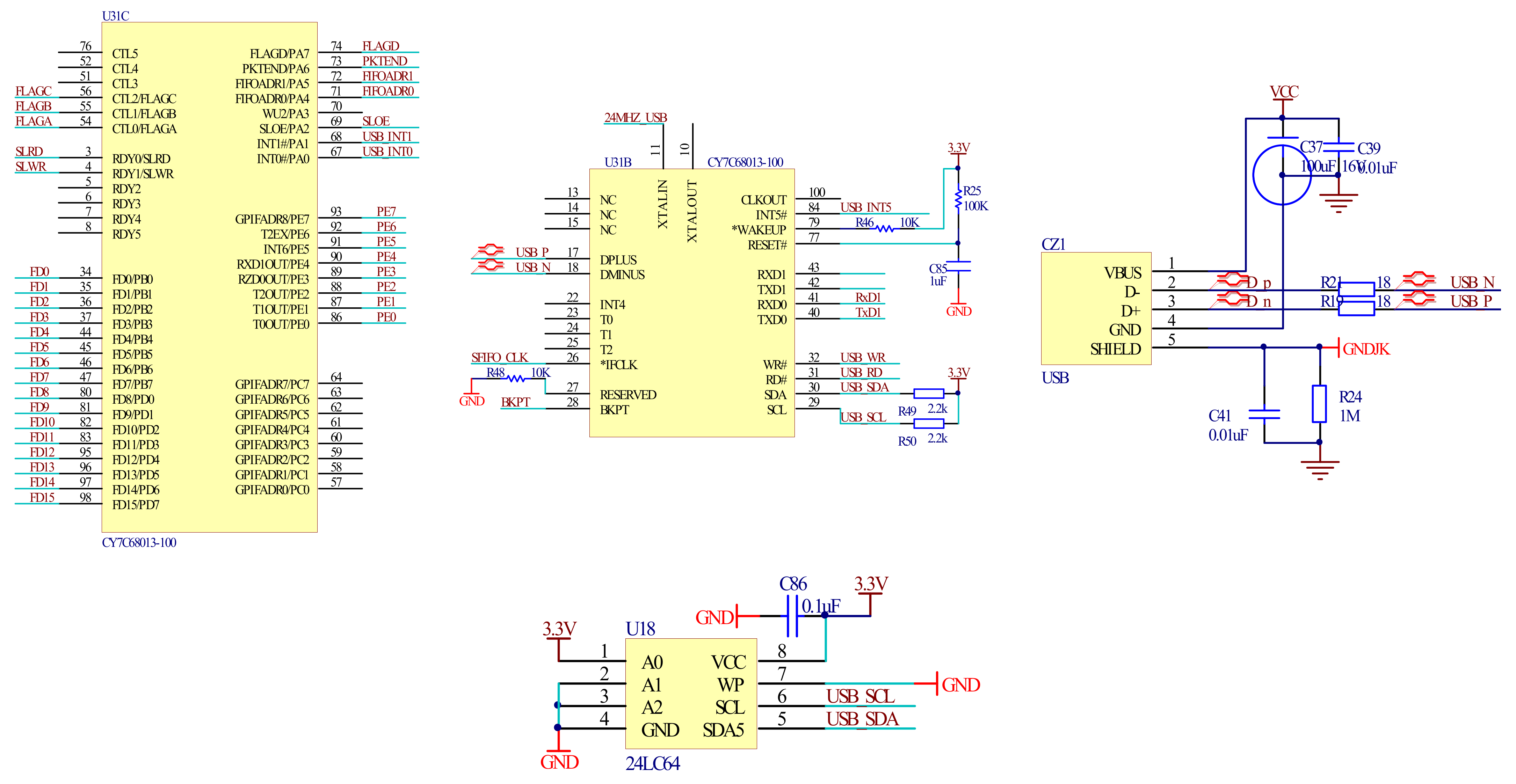
3.2.4. USB Interface Module
4. Experiment and Results
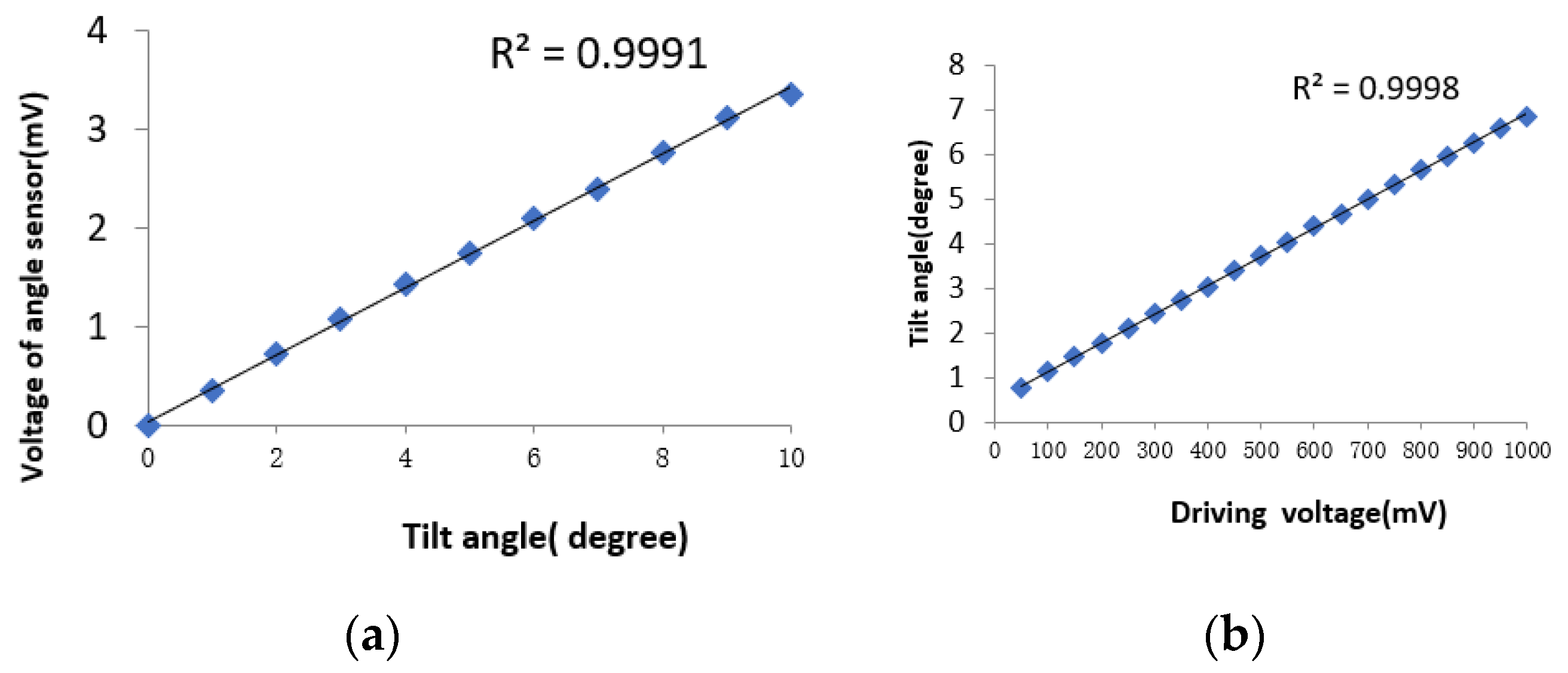
4.1. Micro-Mirror Tests
4.2. Micro-NIR Spectrometer Test
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Navrátil, M.; Christian, A.M.; Enius, C.F. On-line multi sensor monitoring of yogurt and filmjolk fermentations on production scale. J. Agric. Food Chem. 2004, 52, 415–420. [Google Scholar] [CrossRef]
- Andre, N.; Young, T.M.; Rials, T.G. On-line monitoring of the buffer capacity of particle board furnish by near-infrared spectroscopy. Appl. Spectrosc. 2006, 60, 1204–1209. [Google Scholar] [CrossRef] [PubMed]
- Porep, J.U.; Kammerer, D.R.; Carle, R. On-line application of near infrared (NIR) spectroscopy in food production. Trends Food Sci. Technol. 2015, 46, 211–230. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, X.; Piao, R.; Li, S. Near infrared spectrometer with double detectors for food component analysis. Opt. Precis. Eng. 2008, 16, 986–992. [Google Scholar]
- Jiang, L.L.; Zhang, Y.; Wang, Y.; Tan, L.; He, Y. Fast determination of nutritional parameters in soil based on spectroscopic techniques. J. Zhejiang Univ. (Agric. Life Sci.) 2010, 36, 445–450. [Google Scholar]
- Ma, Z.; Pang, X.; Gao, L. Fast analysis of gaseous pollutant in environment by handy fourier transform infrared spectrometer. Environ. Monit. China 2007, 28, 44–46. [Google Scholar]
- Xu, G.T.; Yuan, H.F.; Lu, W.Z. Development of modern near infrared spectroscopic techniques and its applications. Spectrosc. Spectr. 2000, 20, 134–142. [Google Scholar]
- Kong, S.; Wijngaards, D.; Wolffenbuttel, R. Infrared micro-spectrometer based on a diffraction grating. Sens. Actuators A Phys. 2001, 92, 88–95. [Google Scholar] [CrossRef]
- Yang, J.C.; Jung, H.; Lee, G.J.; Kang, J.Y.; Koo, J.G.; Park, J.M.; Park, K.S.; Kong, S.H. Micro-electro-mechanical-systems-based infrared spectrometer composed of multi-slit grating and bolometer array. Jpn. J. Appl. Phys. 2008, 47, 6943–6948. [Google Scholar] [CrossRef]
- He, W.X.; Wen, Z.Y.; Zhou, Y. Design and Performance Test of Practical Near Infrared Micro-Spectrometer. Laser Optoelectron. Prog. 2017, 54, 063002-1-8. [Google Scholar]
- Manzardo, O.; Herzig, H.P.; Marxer, C.R.; de Rooij, N.F. Miniaturized time-scanning Fourier transform spectrometer based on silicon technology. Opt. Lett. 1999, 24, 1705–1707. [Google Scholar] [CrossRef]
- Wallrabe, U.; Solf, C.; Mohr, J.; Korvink, J. Miniaturized Fourier transform spectrometer for the near infrared wavelength regime incorporating an electromagnetic linear actuator. Sens. Actuators A Phys. 2005, 123, 459–467. [Google Scholar] [CrossRef]
- Sandner, T.; Grasshoff, T.; Schenk, H. Out-Of-Plane Translatory MEMS actuator with extraordinary large stroke for optical path length modulation. In Proceedings of the MOEMS and Miniaturized Systems X, San Francisco, CA, USA, 22–27 January 2011; Volume 7930, p. 79300I. [Google Scholar]
- Wu, L.; Xie, H. A large vertical displacement electrothermal bimorph microactuator with very small lateral shift. Sens. Actuators A Phys. 2008, 145, 371–379. [Google Scholar] [CrossRef]
- Yu, K.; Lee, D.; Krishnamoorthy, U.; Park, N.; Solgaard, O. Micromachined Fourier transform spectrometer on silicon optical bench platform. Sens. Actuators A Phys. 2006, 130, 523–530. [Google Scholar] [CrossRef]
- Milne, J.S.; Keating, A.J.; Antoszewski, J.; Dell, J.M.; Musca, C.A.; Faraone, L. Extending the tuning range of SWIR microspectrometers. In Proceedings of the Infrared Technology and Applications XXXIII, Orlando, FL, USA, 9–13 April 2007; Volume 6542, p. 65420M. [Google Scholar]
- Akujärvi, A.; Guo, B.; Mannila, R. MOEMS FPI sensors for NIR-MIR microspectrometer applications. In Proceedings of the MOEMS and Miniaturized Systems XV, San Francisco, CA, USA, 13–18 February 2016; Volume 9760, p. 97600M. [Google Scholar]
- Neumann, N.; Ebermann, M.; Hiller, K.; Kurth, S. Tunable infrared detector with integrated micromachined Fabry-Perot filter. J. Micro/Nanolithogr. MEMS MOEMS 2008, 7, 021004–021009. [Google Scholar] [CrossRef]
- Batchelor, J.D.; Jones, B.T. Development of a digital micromirror spectrometer for analytical atomic spectrometry. Anal. Chem. 1998, 70, 4907–4914. [Google Scholar] [CrossRef]
- Deverse, R.; Hammaker, R.; Fateley, W. Realization of the Hadamard multiplex advantage using a programmable optical mask in a dispersive flat-field near-infrared spectrometer. Appl. Spectrosc. 2000, 54, 1751–1758. [Google Scholar] [CrossRef]
- Xiang, D.; Arnold, M.A. Solid-State Digital Micro-Mirror Array Spectrometer for Hadamard Transform Measurements of Glucose and Lactate in Aqueous Solutions. Appl. Spectrosc. 2011, 65, 1170–1174. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.L.; Liu, H.; Lin, C.B.; Sun, Q. SNR analysis and Hadamard mask modification of DMD Hadamard Transform Near-Infrared spectrometer. Opt. Commun. 2017, 383, 250–254. [Google Scholar] [CrossRef]
- Pügner, T.; Knobbe, J.; Grüger, H.; Schenk, H. Design of a hybrid integrated MEMS scanning grating spectrometer. In Proceedings of the Optical Design and Engineering IV, Marseille, France, 5–8 September 2011; Volume 8167, p. 816718. [Google Scholar]
- Ugner, T.P.; Knobbe, J.; Uger, H.G.; Schenk, H. Realization of a hybrid-integrated MEMS scanning grating spectrometer. In Proceedings of the Next-Generation Spectroscopic Technologies V, Baltimore, MD, USA, 23–27 April 2012; Volume 8374, p. 83740W. [Google Scholar]
- Yan, B.; Yuan, W.; Sun, R.; Qiao, D. Design and simulation of microspectrometer based on torsional MEMS grating. In Proceedings of the 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Design, Manufacturing and Testing of Micro- and Nano-Optical Devices and Systems, Dalian, China, 26–29 April 2010; Volume 7657, p. 76570V. [Google Scholar]
- Ghisleri, C.; Potenza, M.A.C.; Ravagnan, L.; Bellacicca, A.; Milani, P. A simple scanning spectrometer based on a stretchable elastomeric reflective grating. Appl. Phys. Lett. 2014, 104, 61910–61911. [Google Scholar] [CrossRef]
- Pügner, T.; Knobbe, J.; Grüger, H. Near-Infrared Grating Spectrometer for Mobile Phone Applications. Appl. Spectroscopy 2016, 70, 734–745. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wen, Q.; Wen, Z.; Yang, T. Modeling of MOEMS electromagnetic scanning grating mirror for NIR micro-spectrometer. Aip Adv. 2016, 6, 291–296. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wen, Q.; Wen, Z.; Huang, J.; Chang, F. An electromagnetic scanning mirror integrated with blazed grating and angle sensor for a near infrared micro spectrometer. J. Micromech. Microeng. 2017, 27, 125009. [Google Scholar] [CrossRef] [Green Version]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Niu, S.; Zhou, Y.; Yu, L.; Ou, Y.; Ding, J. Control and Signal Acquisition System of Broad-Spectrum Micro-Near-Infrared Spectrometer Based on Dual Single Detector. Micromachines 2021, 12, 696. https://doi.org/10.3390/mi12060696
Liu H, Niu S, Zhou Y, Yu L, Ou Y, Ding J. Control and Signal Acquisition System of Broad-Spectrum Micro-Near-Infrared Spectrometer Based on Dual Single Detector. Micromachines. 2021; 12(6):696. https://doi.org/10.3390/mi12060696
Chicago/Turabian StyleLiu, Haitao, Shuoran Niu, Ying Zhou, Liwei Yu, Yue Ou, and Jiayao Ding. 2021. "Control and Signal Acquisition System of Broad-Spectrum Micro-Near-Infrared Spectrometer Based on Dual Single Detector" Micromachines 12, no. 6: 696. https://doi.org/10.3390/mi12060696