
Miniature Ultralight Deformable Squama Mechanics and Skin Based on Piezoelectric Actuation

Abstract
:1. Introduction
2. Materials and Methods
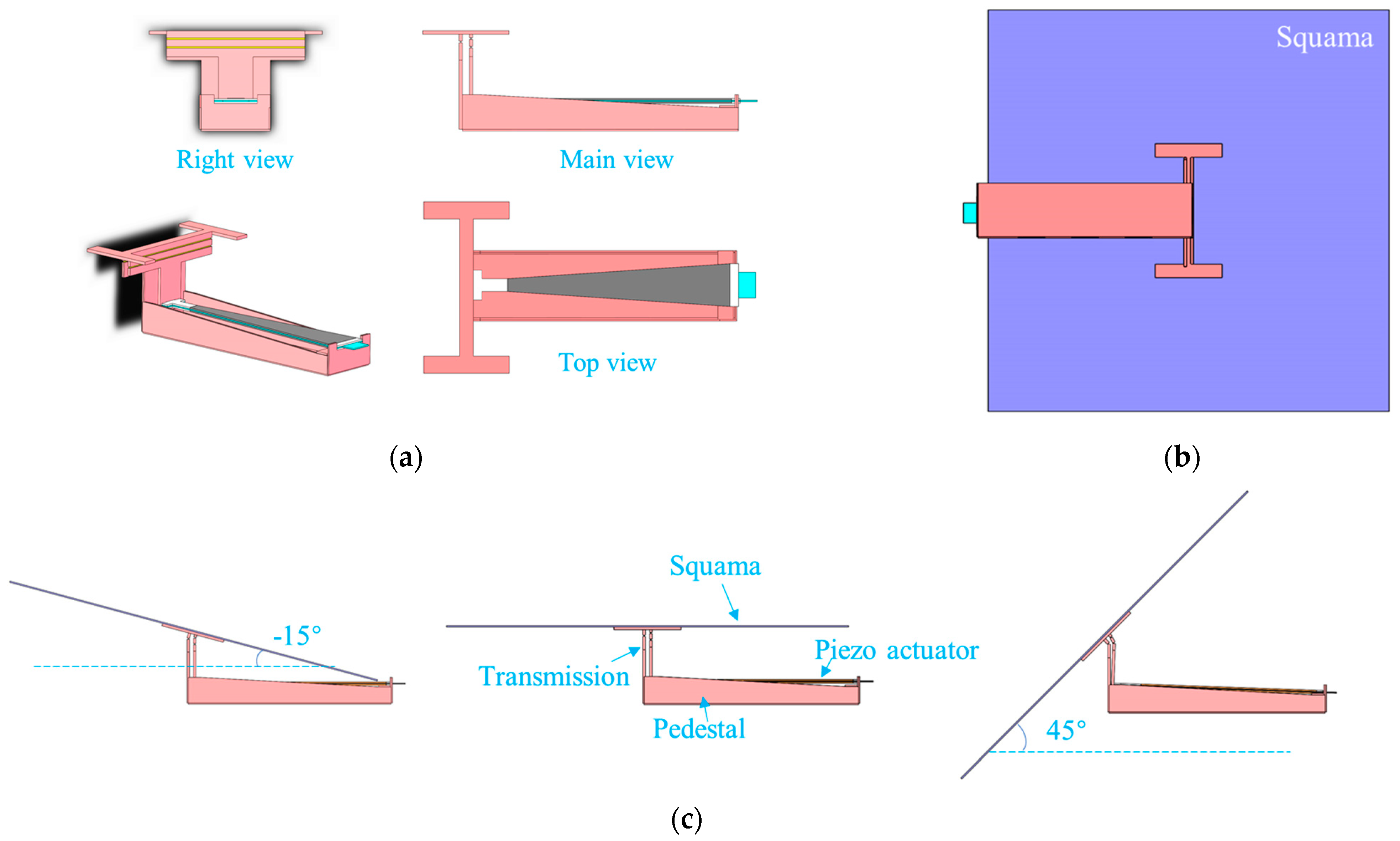
2.1. Design of Deformation Mechanics and Actuator
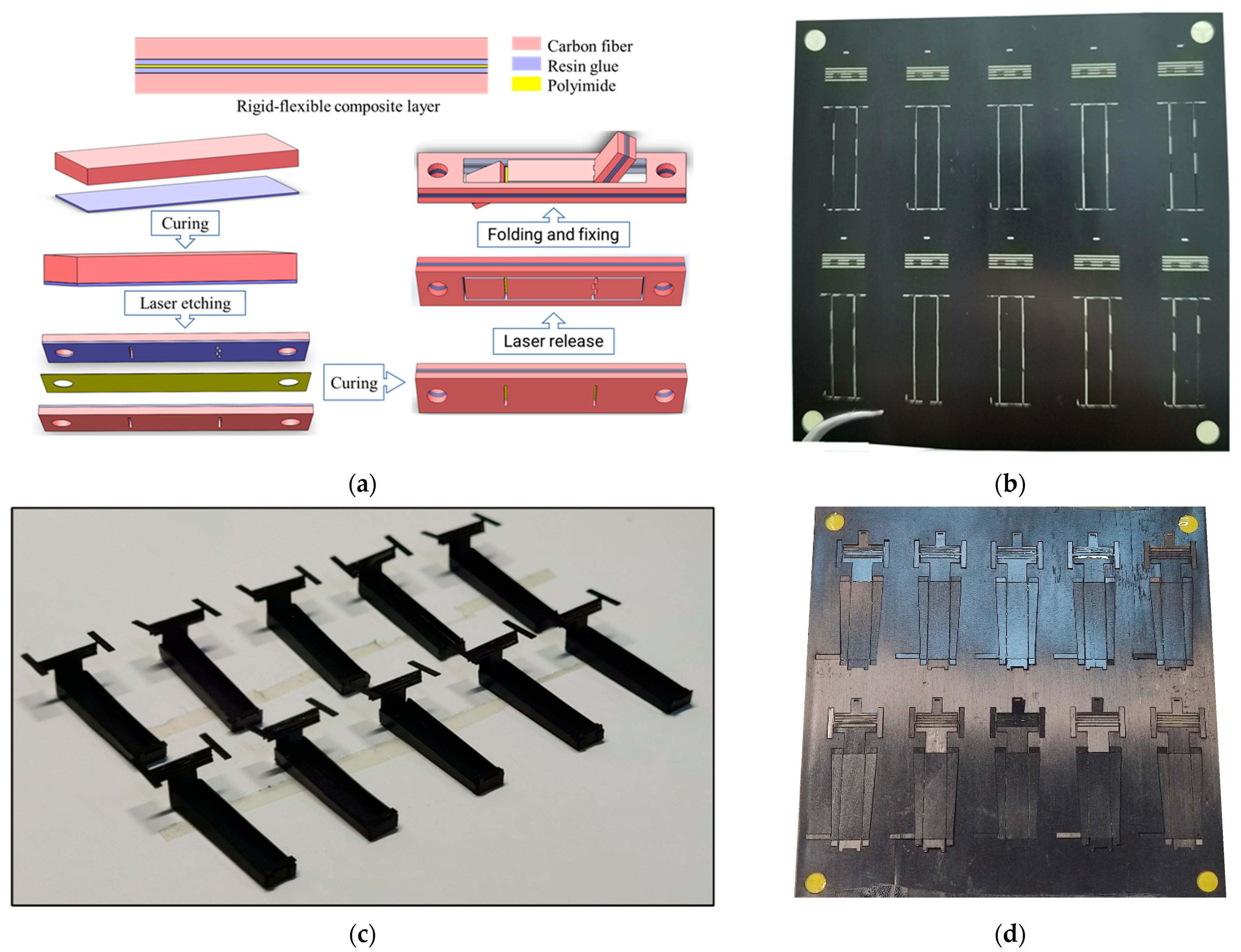
2.2. Processing and Manufacturing of Deformation Mechanics and Actuator
- The carbon fiberboard and resin glue were cured and thermal stress was released so that the carbon fiber board layer remained flat after gluing;
- Laser etching was used to etch the designed hinge groove on the carbon fiberboard and the cured resin glue layer;
- The polyimide film layer was cured in alignment with the adhesive layer between the two pretreated carbon fiber boards and the resin adhesive curing layer;
- A stress release treatment was performed to keep the rigid–flexible composite material layer flat;
- The outer contour of the cured rigid–flexible composite material layer was released, and the released flat rigid–flexible composite material layer was folded according to the designed structure’s fixed-body deformation mechanics.
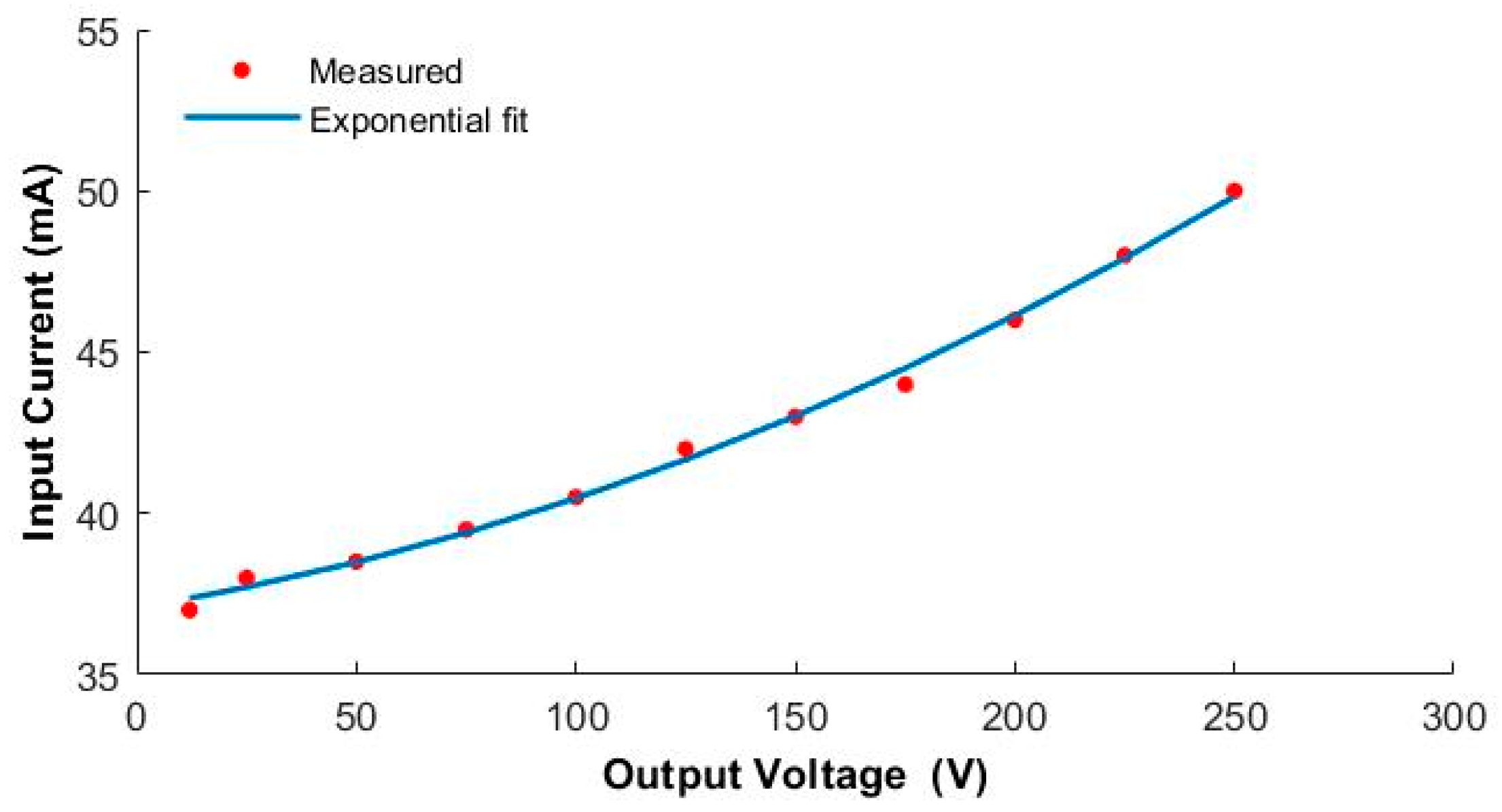
2.3. Miniature Boost Actuate Circuit and Wireless Control Software
3. Results and Discussion
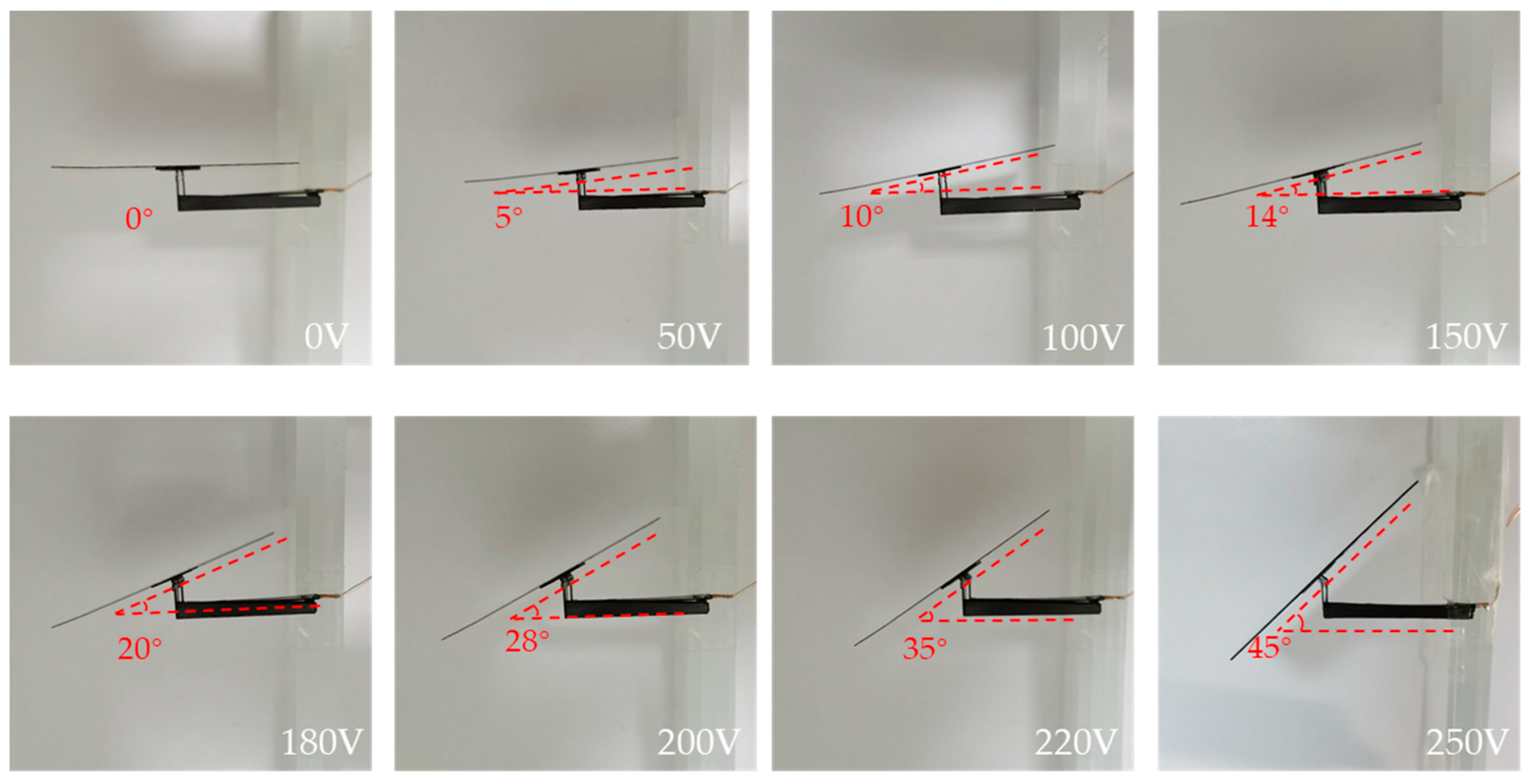
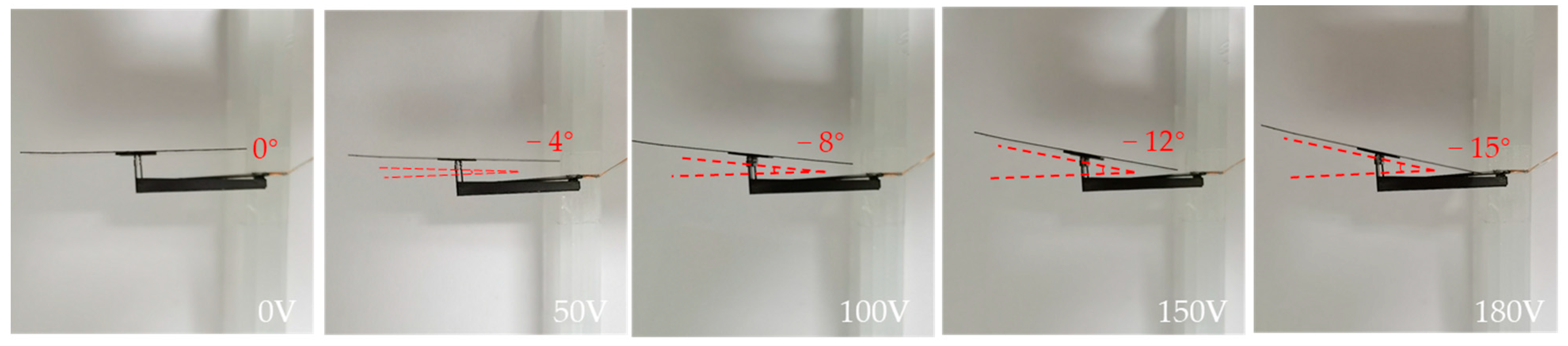
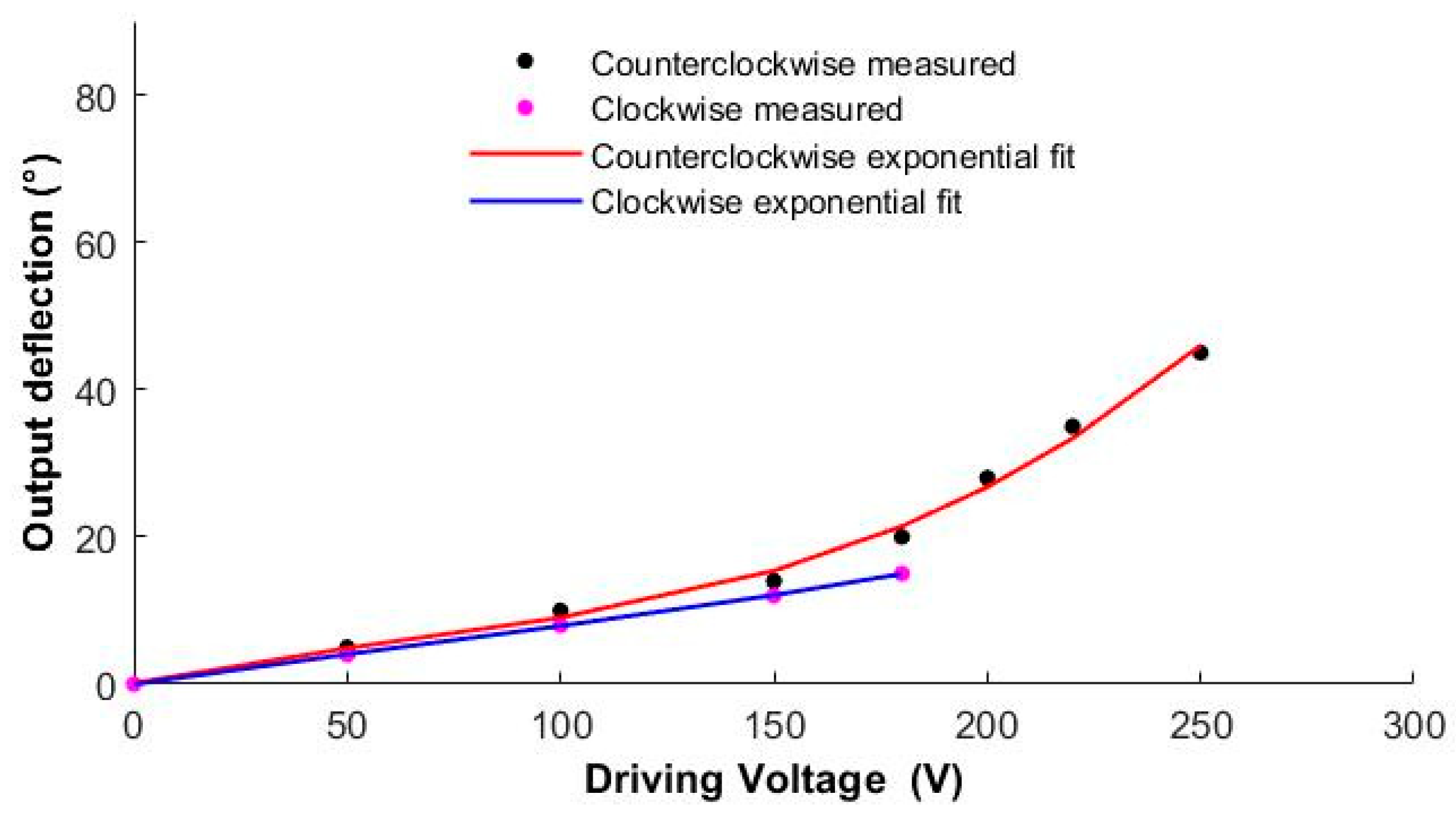
3.1. Single Squama Deflection Angle Test
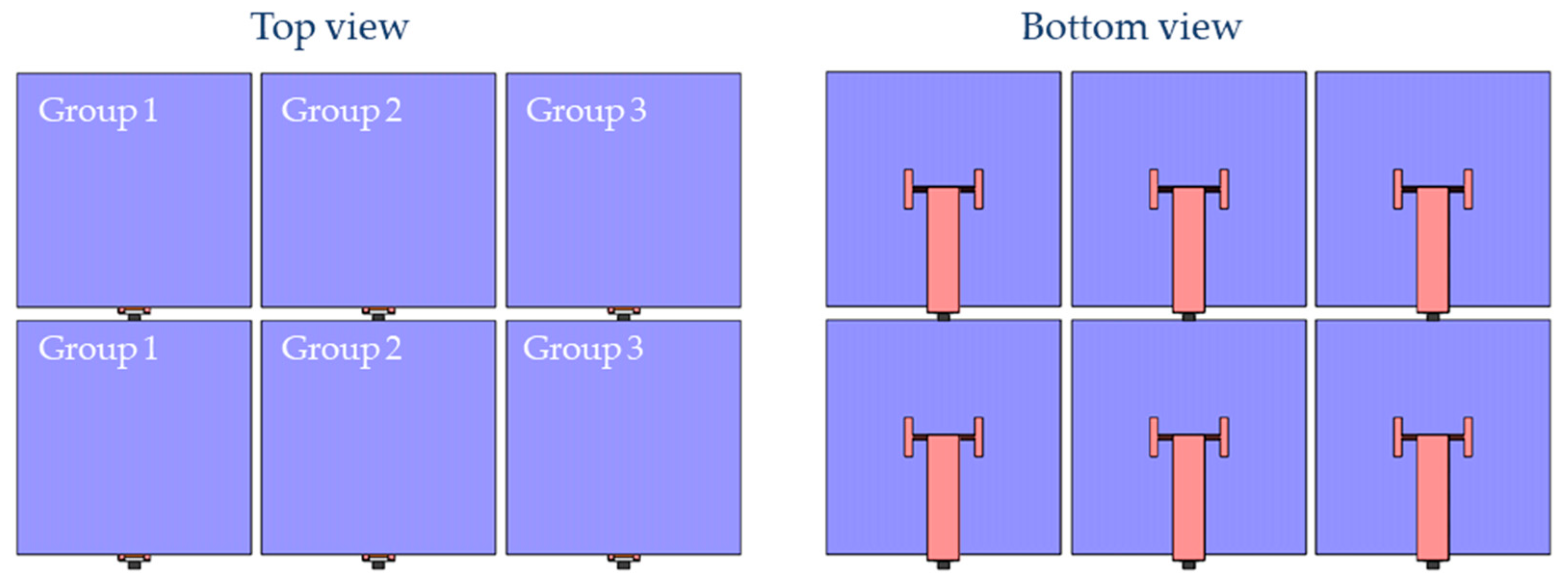
3.2. Arrange Deformed Squamae in Array to Form a Deformable Skin
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, D.J.; Zhang, C.H.; Liu, P. Structure and tensile mechanical behavior off reshwater fish scales. Acta Mater. Compos. Sin. 2018, 35, 2851–2859. (In Chinese) [Google Scholar]
- Liu, P.; Wang, J.W.; Zhu, D.J. Hierarchical structure and mechanical properties of scales from grass carp. Acta Mater. Compos. Sin. 2016, 33, 657–665. (In Chinese) [Google Scholar]
- Varshney, S. Biological and Bio-Inspired Morphometry as a Route to Tunable and Enhanced Materials Design. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Chen, P.Y.; Mckittrick, J.; Meyers, M.A. Biological materials: Functional adaptations and bioinspired designs. Prog. Mater. Sci. 2012, 57, 1492–1704. [Google Scholar] [CrossRef]
- Liu, K.; Tian, Y.; Jiang, L. Bio-inspired super-oleophobic and smart materials: Design, fabrication, and application. Prog. Mater. Sci. 2013, 58, 503–564. [Google Scholar] [CrossRef]
- Liu, M.; Wang, S.; Wei, Z.; Song, Y.; Jiang, L. Bioinspired design of a super-oleophobic and low adhesive water/solid interface. Adv. Mater. 2009, 21, 665–669. [Google Scholar] [CrossRef]
- Kevin, Y.M.; Samuel, M.F.; Robert, J.W. Design, Fabrication, and Modeling of the Split Actuator Microrobotic Bee. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; Volume 12, pp. 1133–1140. [Google Scholar]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled flight of a biologically inspired, insect-scale robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [Green Version]
- Cui, J.; Huang, T.-Y.; Luo, Z.; Testa, P.; Gu, H.; Chen, X.; Nelson, B.J.; Heyderman, L.J. Nanomagnetic encoding of shape-morphing micromachines. Nat. Int. Wkly. J. Sci. 2019, 575, 164–168. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Zhang, W.; Zhang, Z. Liftoff of an electromagnetically driven insect-inspired flapping-wing robot. IEEE Trans. Robot. 2016, 32, 1285–1289. [Google Scholar] [CrossRef]
- Huang, H.W.; Selman, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. Soft micromachines with programmable motility and morphology. Nat. Commun. 2016, 7, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Miyashita, S.; Guitron, S.; Ludersdorfer, M.; Sung, C.R.; Rus, D. An untethered miniature origami robot that self-folds, walks, swims, and degrades. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 1490–1496. [Google Scholar]
- Qi, M.J.; Zhu, Y.S.; Liu, Z.W.; Zhang, X.Y.; Yan, X.J.; Lin, L.W. A fast-moving electrostatic crawling insect. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 761–764. [Google Scholar]
- Li, Y.F.; Zhang, W.P.; Zou, Y.; Chen, C. Research on Structure Design and Processing Technology of Piezoelectric Micro Bionic Hexapod Segmented Robot. Mach. Des. Manuf. 2017, 213–216. [Google Scholar] [CrossRef]
- Robert, J.W.; Steltz, E.; Fearing, R.S. Optimal energy density piezoelectric bending actuators. Sens. Actuators A Phys. 2005, 119, 476–488. [Google Scholar]
- Karpelson, M.; Wei, G.Y.; Robert, J.W. A review of actuation and power electronics options for flapping-wing robotic insects. In Proceedings of the IEEE International Conference on Robotics and Automation Pasadena, Pasadena, CA, USA, 19–23 May 2008; pp. 779–786. [Google Scholar]
- Robert, J.W. Liftoff of a 60mg flapping-wing MAV. In Proceedings of the International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1889–1894. [Google Scholar]
- Noah, T.J.; Farrell, H.E.; Michael, K.; Robert, J.W. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 2019, 570, 491–507. [Google Scholar]
- Zeng, H.; Wani, O.M.; Wasylczyk, P.; Priimagi, A. Bioinspired underwater locomotion of light-driven liquid crystal gels. Proc. Natl. Acad. Sci. USA 2020, 117, 5125–5133. [Google Scholar]
- Zeng, H.; Wani, Q.W.; Wasylczyk, P.; Priimagi, A. Light-Driven, Caterpillar-Inspired Miniature Inching Robot. Macromol. Rapid Commun. 2018, 39, 1022–1336. [Google Scholar] [CrossRef] [PubMed]
- Amirreza, A.; Oncay, Y.; Paul, W.; Metin, S. Acoustically powered surface-slipping mobile microrobots. Proc. Natl. Acad. Sci. USA 2020, 117, 3469–3477. [Google Scholar]
- Kim, D.G.; Hao, Z.J.; Wang, T.Y.; Azadeh, A. Magnetically-Actuated Micro-Scale Bristle-Bots. In Proceedings of the 2020 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Toronto, ON, Canada, 13–17 July 2020. [Google Scholar]
- Paxton, W.F.; Kistler, K.C.; Olmeda, C.C.; Sen, A.; St Angelo, S.K.; Cao, Y.; Mallouk, T.E.; Lammert, P.E.; Crespi, V.H. Catalytic Nanomotors: Autonomous Movement of Striped Nanorods. J. Am. Chem. Soc. 2004, 126, 13424–13431. [Google Scholar] [CrossRef] [PubMed]
- Teo, W.Z.; Wang, H.; Pumera, M. Beyond platinum: Silver-catalyst based bubble propelled tubular micromotors. Chem. Commun. 2016, 52, 4333–4336. [Google Scholar] [CrossRef] [PubMed]
- Weibel, D.B.; Garstecki, P.; Ryan, D.; DiLuzio, W.R.; Mayer, M.; Seto, J.E.; Whitesides, G.M. Microoxen: Microorganisms to move microscale loads. Proc. Natl. Acad. Sci. USA 2005, 102, 11963–11967. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thubagere, A.J.; Li, W.; Johnson, R.F.; Chen, Z.; Doroudi, S.; Lee, Y.L.; Izatt, G.; Wittman, S.; Srinivas, N.; Woods, D.; et al. A cargo-sorting DNA robot. Science 2017, 357, 6558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Whitney, J.P.; Sreetharan, P.S.; Ma, K.Y.; Robert, J.W. Pop-up book MEMS. J. Micromech. Microeng. 2011, 21, 11502. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.F.; Aaron, O.; Robert, J.W. An efficient method for the design and fabrication of 2D laminate robotic structures. In Proceedings of the IEEE International Conference on Real-time Computing and Robotics, Kandima, Maldives, 1–5 August 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Part | ||||||||
| Size (mm) | 0.35 | 0.3 | 0.3 | 0.5 | 13 | 2.5 | 0.75 | 5.5 |
| Driving Voltage (V) | 0 | 50 | 100 | 150 | 180 | 200 | 220 | 250 |
| Output Deflection (°) | 0 | 5 | 10 | 14 | 20 | 28 | 35 | 45 |
| Driving Voltage (V) | 0 | 50 | 100 | 150 | 180 |
| Output Deflection (°) | 0 | −4 | −8 | −12 | −15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, X.; Xi, X.; Lu, K.; Wang, C.; Chen, X.; Wu, Y.; Wu, X.; Xiao, D. Miniature Ultralight Deformable Squama Mechanics and Skin Based on Piezoelectric Actuation. Micromachines 2021, 12, 969. https://doi.org/10.3390/mi12080969
Lu X, Xi X, Lu K, Wang C, Chen X, Wu Y, Wu X, Xiao D. Miniature Ultralight Deformable Squama Mechanics and Skin Based on Piezoelectric Actuation. Micromachines. 2021; 12(8):969. https://doi.org/10.3390/mi12080969
Chicago/Turabian StyleLu, Xiang, Xiang Xi, Kun Lu, Chengxiang Wang, Xiang Chen, Yulie Wu, Xuezhong Wu, and Dingbang Xiao. 2021. "Miniature Ultralight Deformable Squama Mechanics and Skin Based on Piezoelectric Actuation" Micromachines 12, no. 8: 969. https://doi.org/10.3390/mi12080969