
Design, Modeling and Simulation of a Liquid Jet Gyroscope Based on Electrochemical Transducers

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory and Mathematical Model
2.1. Electrochemical Transducer
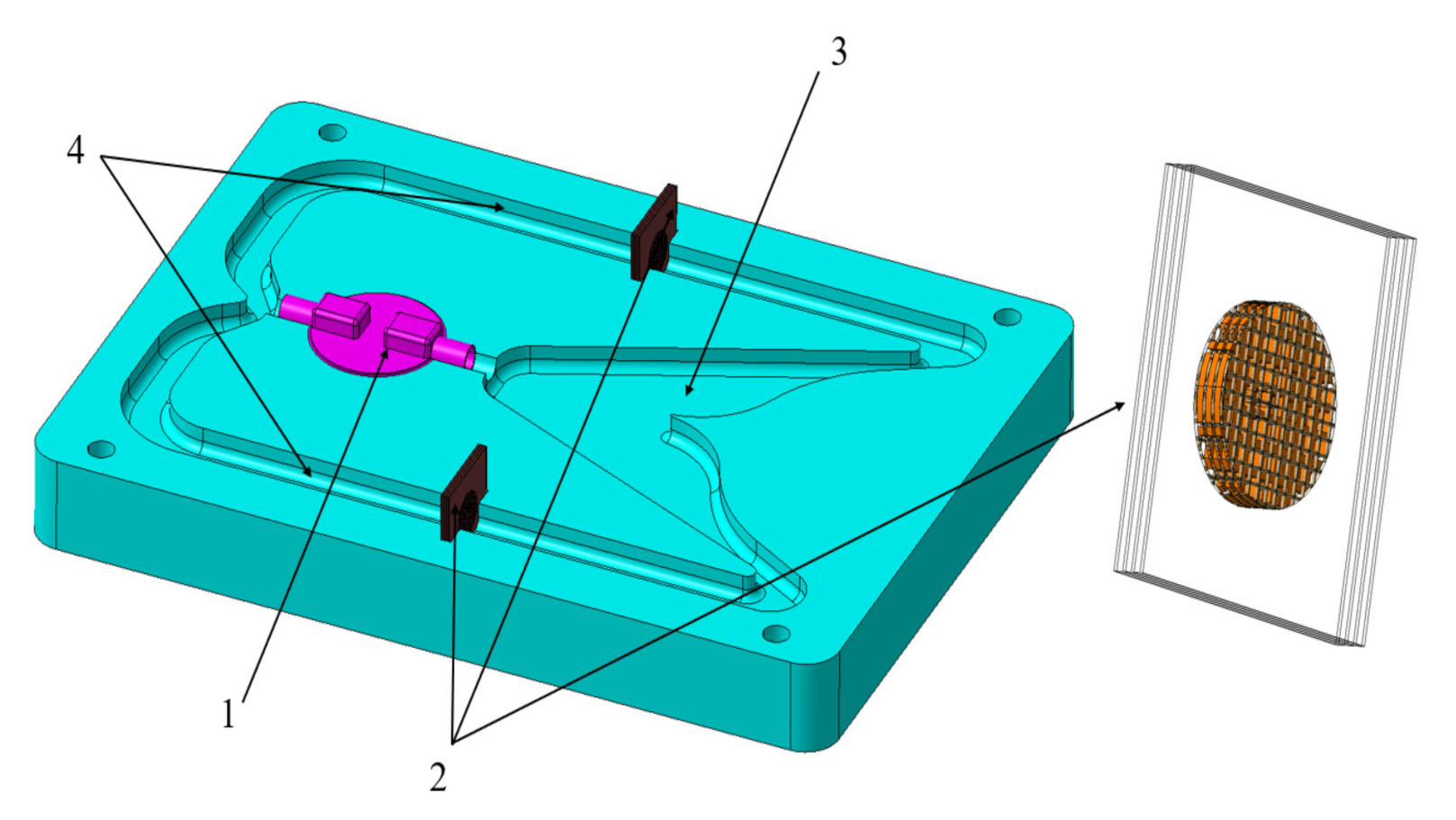
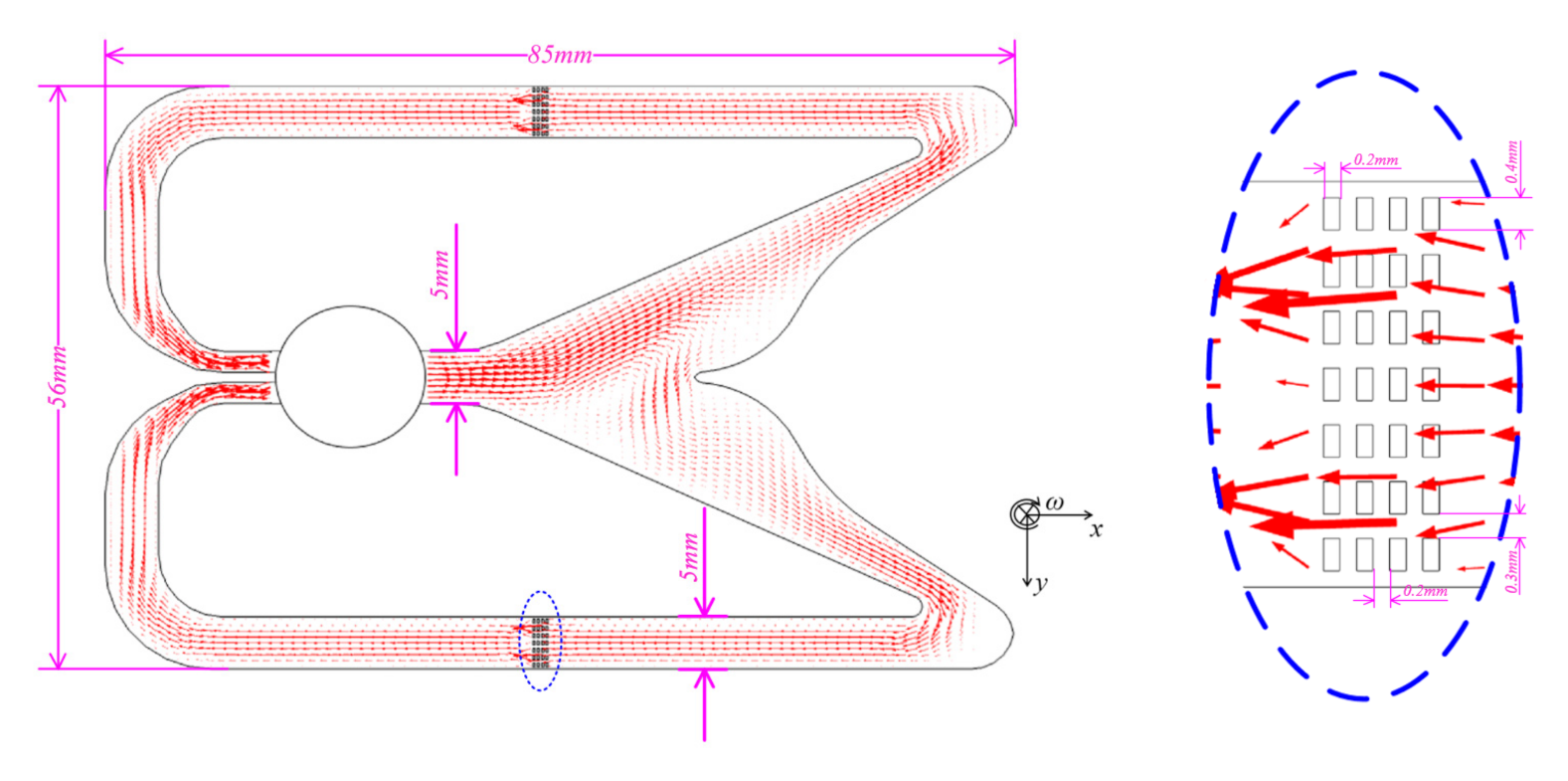
2.2. Configuration of Gyroscope
2.3. Mathematical Model
3. Solver Validation
4. Result and Analysis
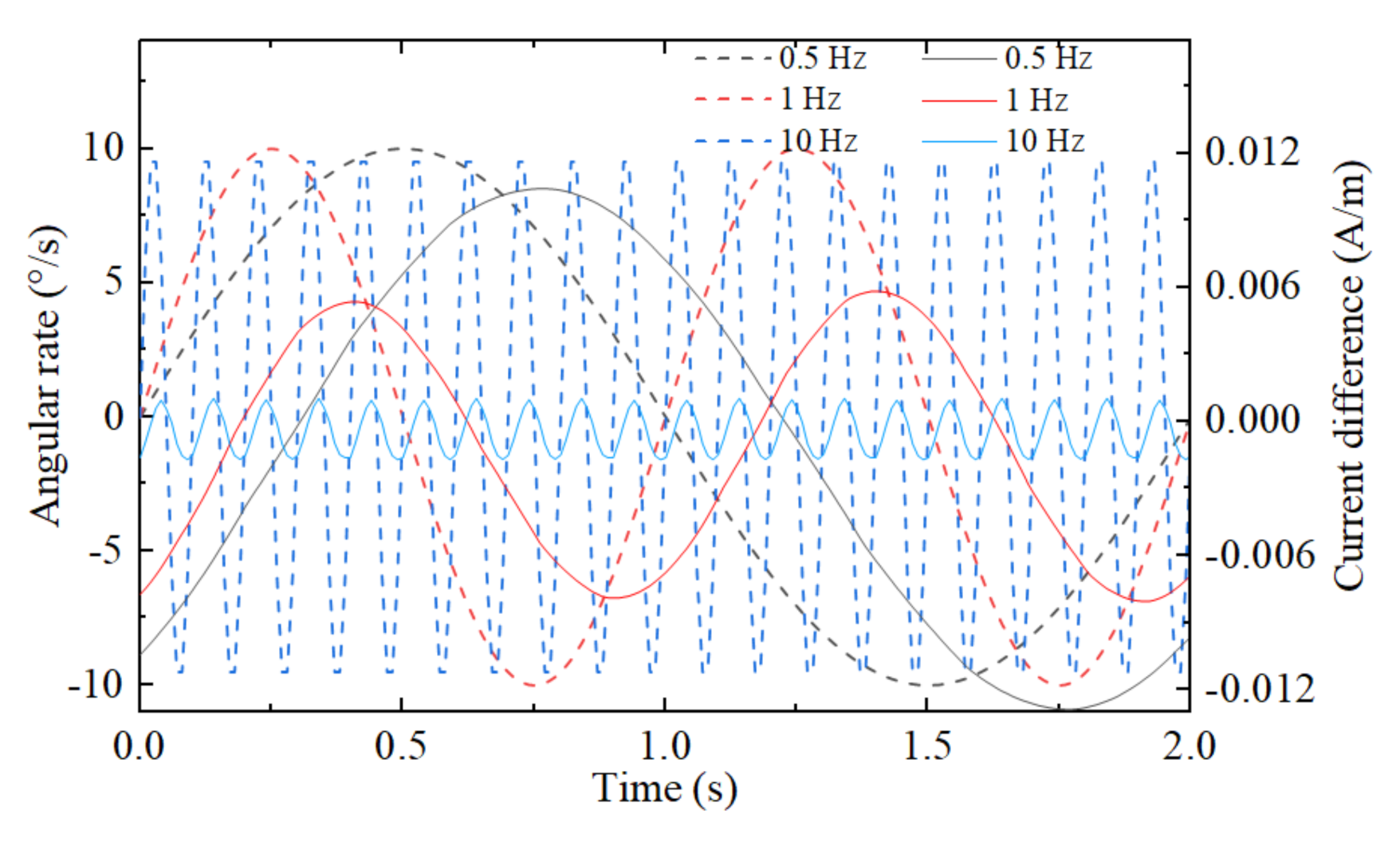
4.1. The Time Domain Response
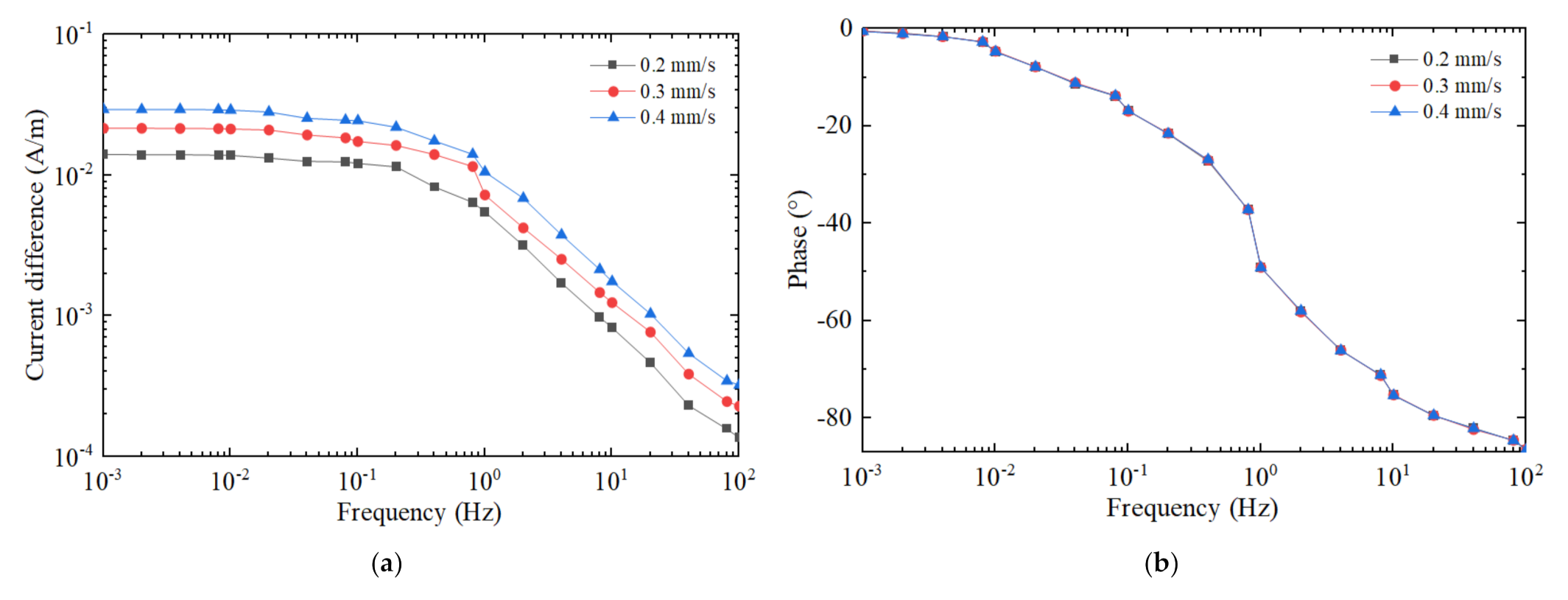
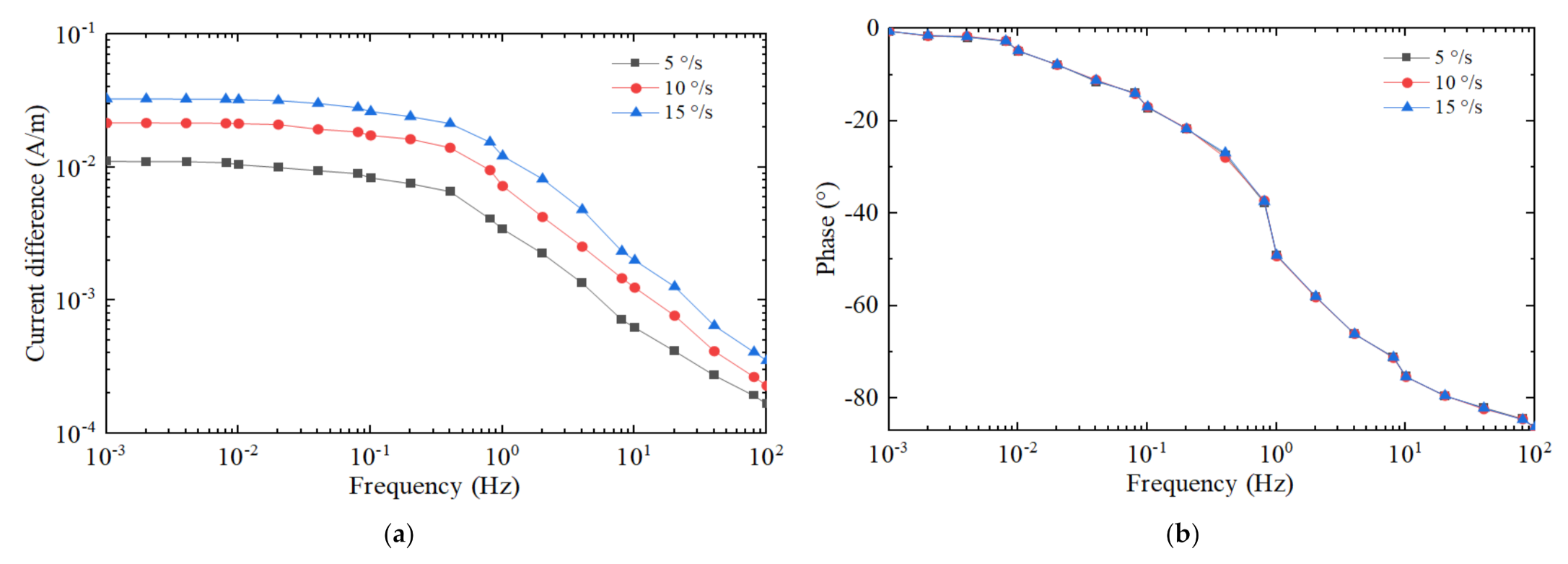
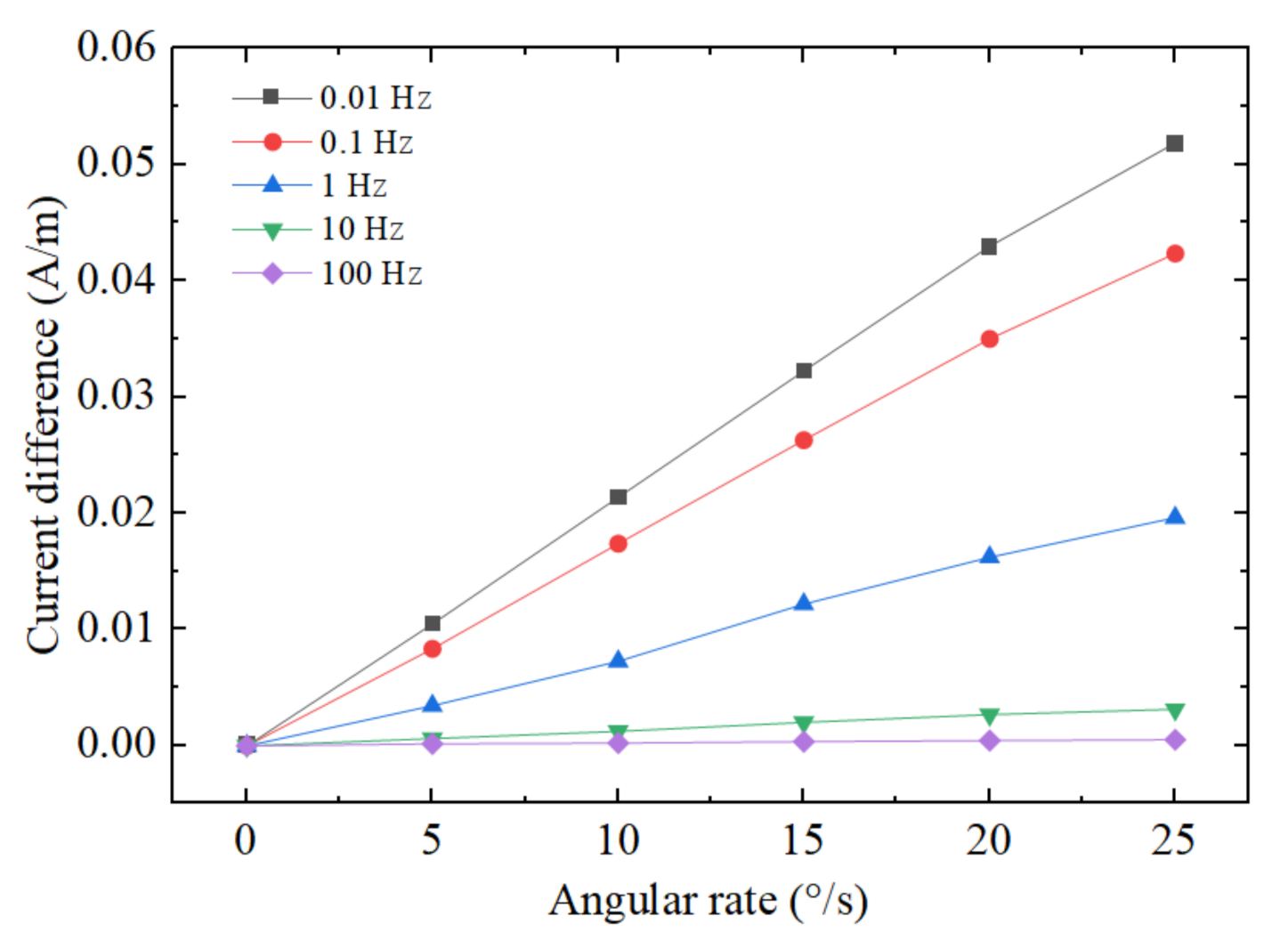
4.2. The Frequency Domain Response
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dau, V.T.; Dinh, T.X.; Tran, C.D.; Bui, T.T.; Phan, H.T. A Study of Angular Rate Sensing by Corona Discharge Ion Wind. Sens. Actuat. A-Phys. 2018, 277, 169–180. [Google Scholar] [CrossRef] [Green Version]
- Dau, V.T.; Dao, D.V.; Shiozawa, T.; Kumagai, H.; Sugiyama, S. Development of a dual-axis thermal convective gas gyroscope. J. Micromech. Microeng. 2006, 16, 1301–1306. [Google Scholar] [CrossRef]
- Dau, V.T.; Dao, D.V.; Shiozawa, T.; Kumagai, H.; Sugiyama, S. A single-axis thermal convective gas gyroscope. Sens. Mater. 2005, 17, 453–463. [Google Scholar]
- Takemura, K.; Yokota, S.; Suzuki, M.; Edamura, K.; Kumagai, H.; Imamura, T. A Liquid Rate Gyroscope Based on Electro-conjugate Fluid. Sens. Actuat. A-Phys. 2009, 149, 173–179. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Tran, C.D.; Bui, P.N.; Vien, D.D.; Phan, H.T. Fluidic Mechanism for Dual-axis Gyroscope. Mech. Syst. Signal Pr. 2018, 108, 73–87. [Google Scholar] [CrossRef]
- Dau, V.; Dinh, T.X.; Sugiyama, S. A MEMS-based silicon micropump with intersecting channels and integrated hotwires. J. Micromech. Microeng. 2009, 19, 125016. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Neeshpapa, A.V.; Shabalina, A.S. Electrochemical seismometers of linear and angular motion. Enc. Earthq. Eng. 2015, 944–961. [Google Scholar] [CrossRef]
- Levchenko, D.G.; Kuzin, I.P.; Safonov, M.V.; Sychikov, V.N.; Ulomov, I.V.; Kholopov, B.V. Experience in seismic signal recording using broadband electrochemical seismic sensors. Seism Inst. 2010, 46, 250–264. [Google Scholar] [CrossRef]
- Bernauer, F.; Wassermann, J.; Igel, H. Rotational sensors—A comparison of different sensor types. J. Seismol. 2012, 16, 595–602. [Google Scholar] [CrossRef]
- Leugoud, R.; Kharlamov, A. Second generation of a rotational electrochemical seismometer using magnetohydrodynamic technology. J. Seismol. 2012, 16, 587–593. [Google Scholar] [CrossRef]
- Neeshpapa, A.; Antonov, A.; Agafonov, V. A low-noise DC seismic accelerometer based on a combination of MET/MEMS sensors. Sensors 2014, 15, 365–381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kozlov, V.A.; Agafonov, V.M.; Bindler, J.; Vishnyakov, A.V. Small, low-power, low-cost IMU for personal navigation and stabilization systems. Proc. Inst. Navig. Natl. Tech. Meet. 2006, 2, 650–655. [Google Scholar]
- Zaitsev, D.; Agafonov, V.; Egorov, E.V.; Antonov, A.N.; Krishtop, V. Precession Azimuth Sensing with Low-Noise Molecular Electronics Angular Sensors. Sensors 2016, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Kapustian, N.; Antonovskaya, G.; Agafonov, V.; Neumoin, K.; Safonov, M. Seismic Monitoring of Linear and Rotational Oscillations of the Multistory Buildings in Moscow. Seism. Behav. Des. Irregul. Complex. Civil. Struct. 2013, 24, 353–363. [Google Scholar]
- Agafonov, V.M. Modeling the Convective Noise in an Electrochemical Motion Transducer. Int. J. Electrochem. Sci. 2018, 13, 11432–11442. [Google Scholar]
- Sun, Z.; Agafonov, V.M. 3D numerical simulation of the pressure-driven flow in a four-electrode rectangular micro-electrochemical accelerometer. Sens. Actuat. B-Chem. 2010, 146, 231–238. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Nesterov, A.S. Convective Current in a Four-Electrode Electrochemical Cell at Various Boundary Conditions at Anodes. Russ. J. Electrochem. 2005, 41, 987–992. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Krishtop, V.G. Diffusion Sensor of Mechanical Signals: Frequency Response at High Frequencies. Russ. J. Electrochem. 2004, 40, 537–541. [Google Scholar] [CrossRef]
- Kozlov, V.A.; TerentEv, D.A. Transfer Function of a Diffusion Transducer at Frequencies Exceeding the Thermodynamic Frequency. Russ. J. Electrochem. 2003, 39, 401–406. [Google Scholar] [CrossRef]
- Aseev, G.G. Electrolytes Transport Phenomena: Methods for Calculation of Multicomponent Solutions and Experimental Data on Viscosities and Diffusion Coefficients; Begell House Publishers: New York, NY, USA, 1998. [Google Scholar]
- Anikin, E.A.; Egorov, E.V.; Agafonov, V.M. Dependence of self-noise of the angular motion sensor based on the technology of molecular-electronic transfer, on the area of the electrodes. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Wang, X.; Sun, J.; Chen, H.; Ju, C.; Lin, T.; Tian, B.; Zheng, F. Design, Modeling and Simulation of a Liquid Jet Gyroscope Based on Electrochemical Transducers. Micromachines 2021, 12, 1008. https://doi.org/10.3390/mi12091008
Yang D, Wang X, Sun J, Chen H, Ju C, Lin T, Tian B, Zheng F. Design, Modeling and Simulation of a Liquid Jet Gyroscope Based on Electrochemical Transducers. Micromachines. 2021; 12(9):1008. https://doi.org/10.3390/mi12091008
Chicago/Turabian StyleYang, Dapeng, Xiaohuan Wang, Junze Sun, Heng Chen, Chenhao Ju, Tingting Lin, Baofeng Tian, and Fan Zheng. 2021. "Design, Modeling and Simulation of a Liquid Jet Gyroscope Based on Electrochemical Transducers" Micromachines 12, no. 9: 1008. https://doi.org/10.3390/mi12091008
APA StyleYang, D., Wang, X., Sun, J., Chen, H., Ju, C., Lin, T., Tian, B., & Zheng, F. (2021). Design, Modeling and Simulation of a Liquid Jet Gyroscope Based on Electrochemical Transducers. Micromachines, 12(9), 1008. https://doi.org/10.3390/mi12091008