
Migration Behavior of Low-Density Particles in Lab-on-a-Disc Devices: Effect of Walls

 , and
, and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Effect of Lateral Walls
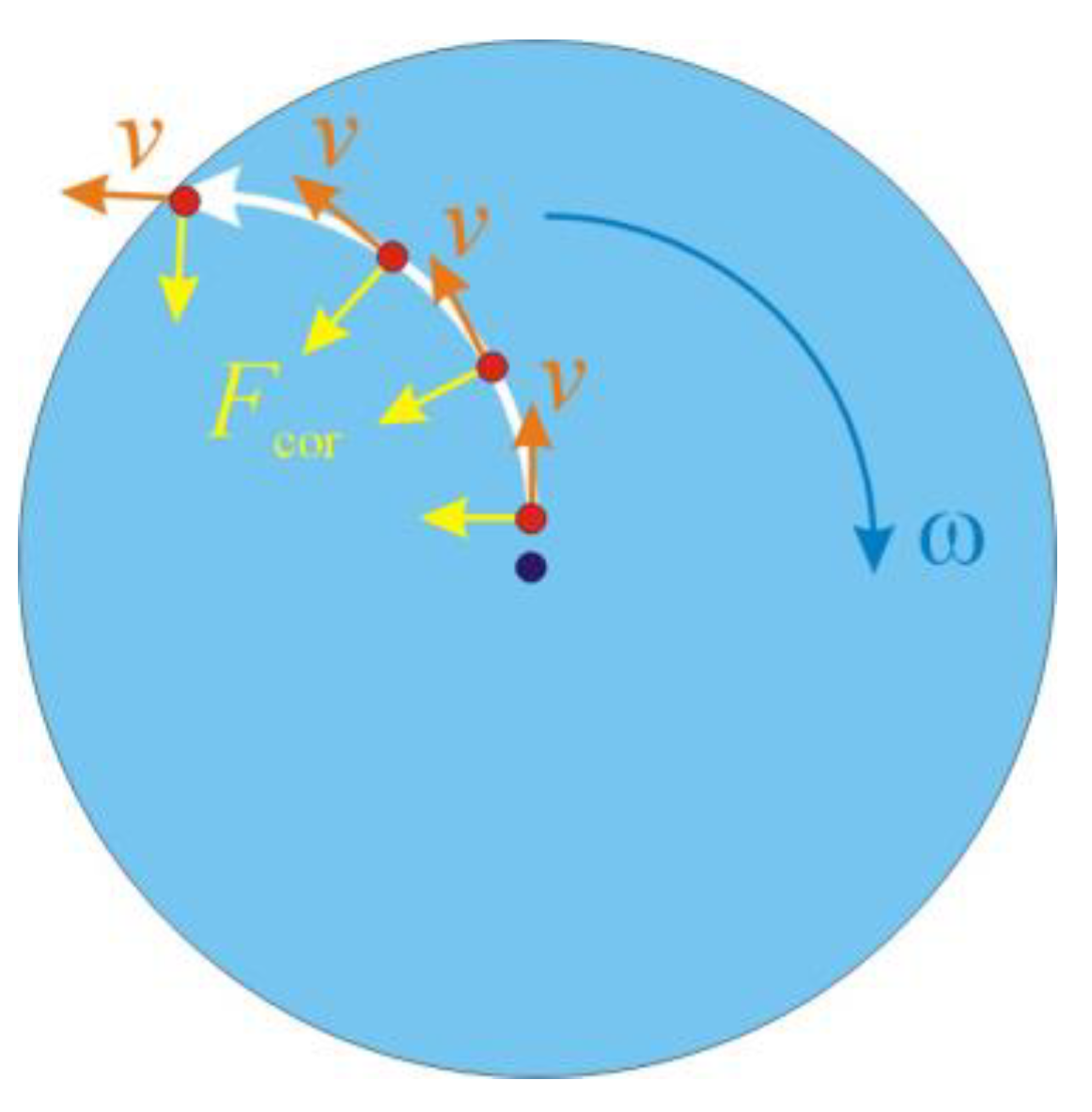
2.1. Governing Forces
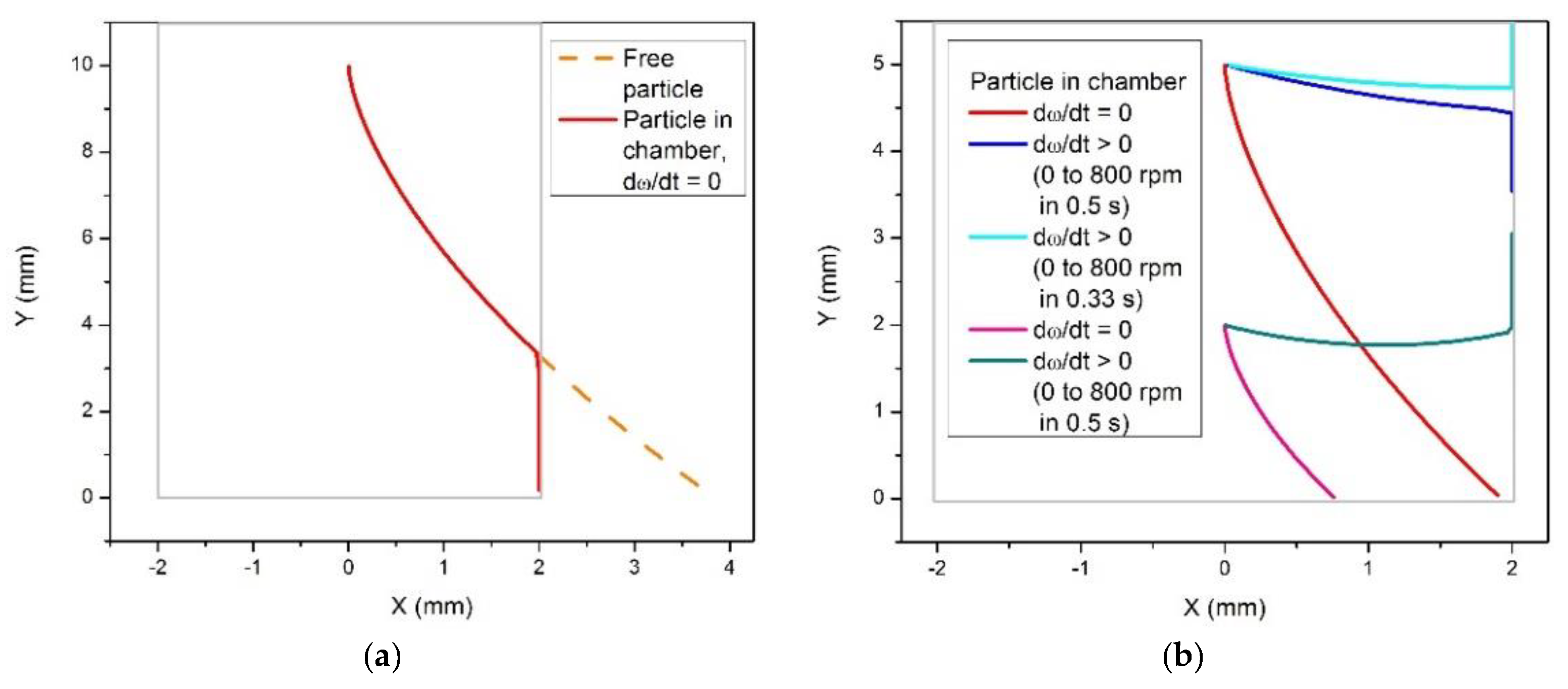
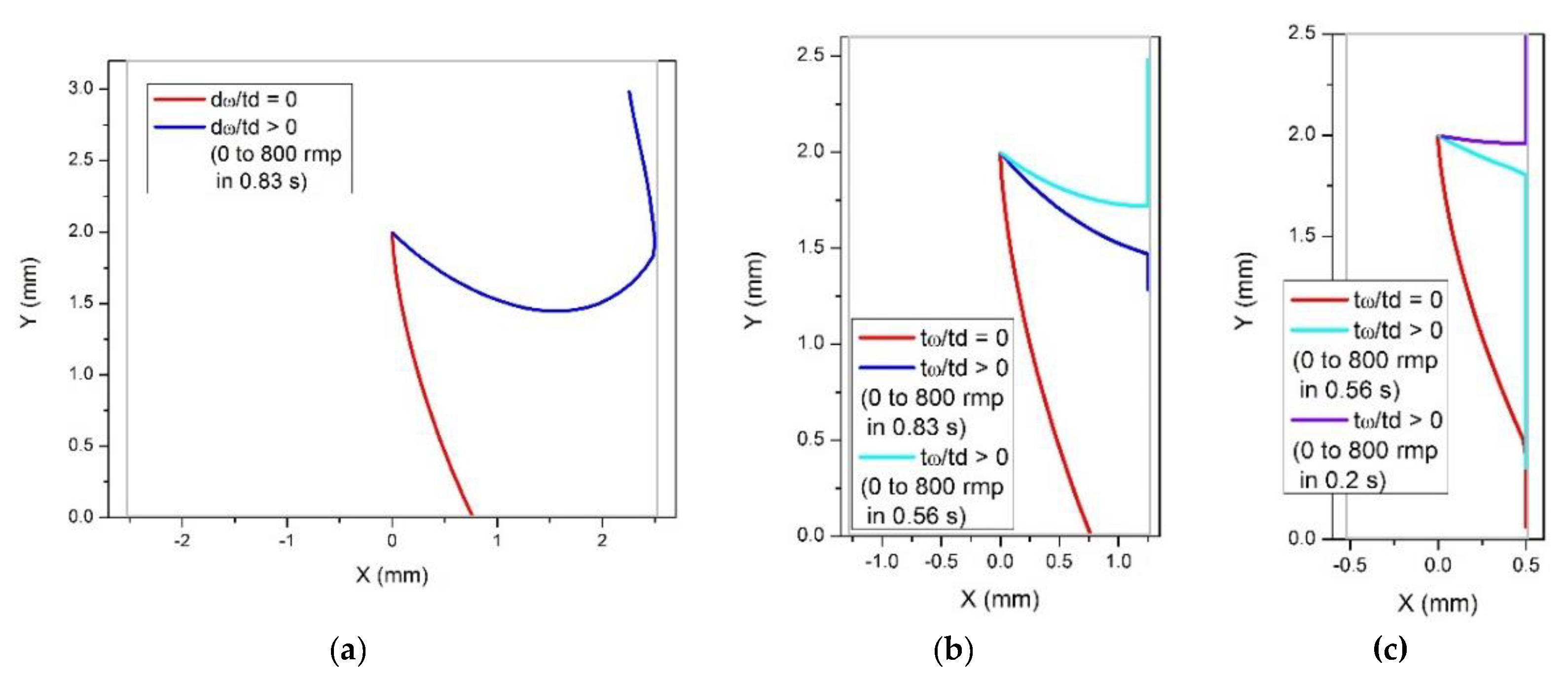
2.2. Effect of Lateral Walls
2.3. Particles with Density Lower Than That of the Fluid
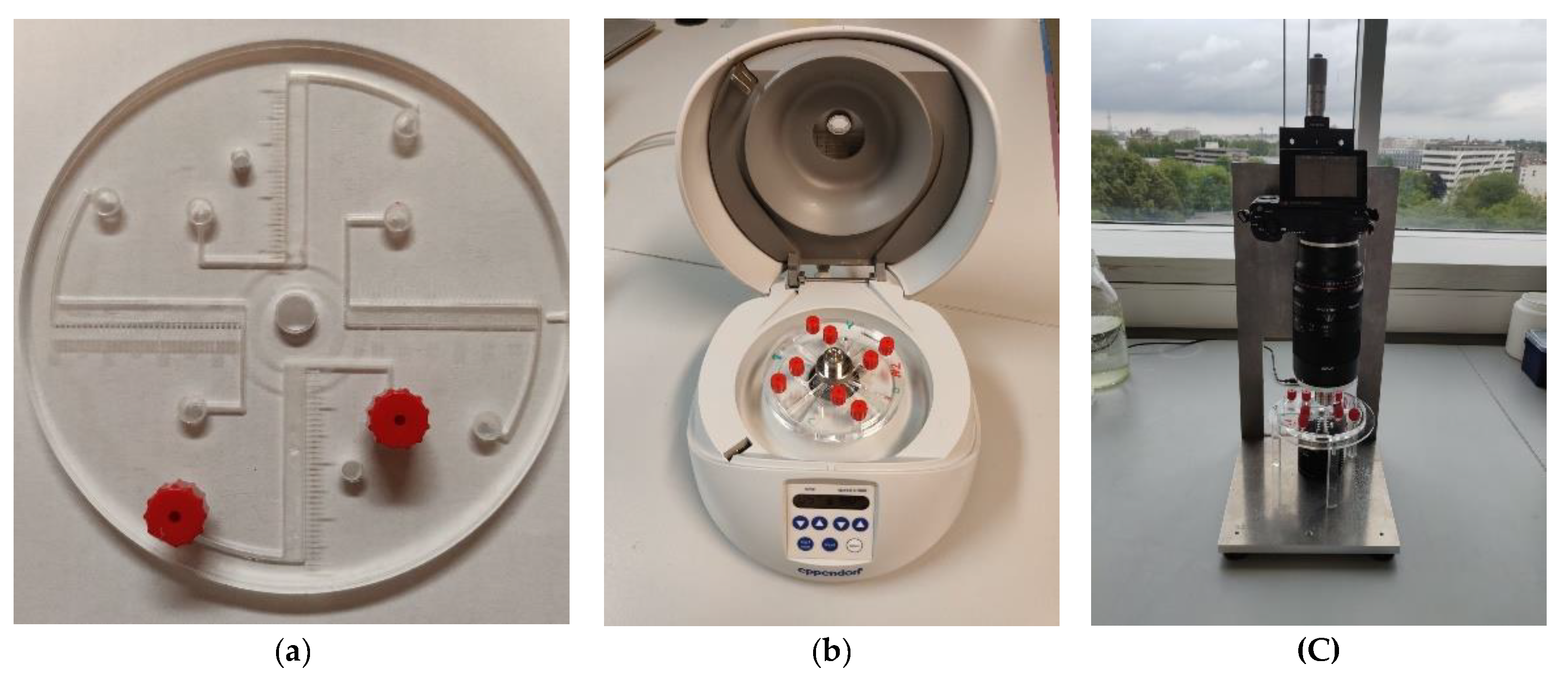
3. Experiment
4. Conclusions
- (i)
- Our work provides an understanding of the effects which were observed and did not have proper explanation (e.g., were attributed to the device imperfections such as surface roughness or eventual leakages, etc.). Our work explicitly revealed the physical mechanisms behind the unusual observed behavior, such as back and forth movements (in particular, when close to the center of rotation). Knowing these mechanisms allows one to better control the motion of particles in LOD devices.
- (ii)
- Our findings provide instructions as to how to avoid the undesired effects, e.g., by narrowing the chambers, or by other design improvements. The strength of our approach is that it allows predicting trajectories of particles in any geometry, by a proper description of the boundary conditions, and in this way improve device design to eliminate or to minimize undesired effects.
- (iii)
- More challenging, the results can be considered for potential selectivity of particles based on, e.g., their position with respect to the center of rotation, or their individual properties. In this way one can think of collecting various particles separately by a proper device design.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Madou, M.; Zoval, J.; Jia, G.G.; Kido, H.; Kim, J.; Kim, N. Lab on a CD. Annu. Rev. Biomed. Eng. 2006, 8, 601–628. [Google Scholar] [CrossRef] [Green Version]
- Smith, S.; Mager, D.; Perebikovsky, A.; Shamloo, E.; Kinahan, D.; Mishra, R.; Delgado, S.M.T.; Kido, H.; Saha, S.; Ducrée, J.; et al. CD-Based Microfluidics for Primary Care in Extreme Point-of-Care Settings. Micromachines 2016, 7, 22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, L.X.; Perebikovsky, A.; Moebius, J.; Kulinsky, L.; Madou, M. Lab-on-a-CD: A Fully Integrated Molecular Diagnostic System. J. Lab. Autom. 2016, 21, 323–355. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ducrée, J. Secure Air Traffic Control at the Hub of Multiplexing on the Centrifugo-Pneumatic Lab-on-a-Disc Platform. Micromachines 2021, 12, 700. [Google Scholar] [CrossRef] [PubMed]
- Kido, H.; Micic, M.; Smith, D.; Zoval, J.; Norton, J.; Madou, M. A novel, compact disk-like centrifugal microfluidics system for cell lysis and sample homogenization. Coll. Surf. B Biointerfaces 2007, 58, 44–51. [Google Scholar] [CrossRef] [PubMed]
- Jahromi, A.K.; Saadatmand, M.; Eghbal, M.; Yeganeh, L.P. Development of simple and efficient Lab-on-a-Disc platforms for automated chemical cell lysis. Sci. Rep. 2020, 10, 11039. [Google Scholar] [CrossRef]
- Roy, E.; Stewart, G.; Mounier, M.; Malic, L.; Peytavi, R.; Clime, L.; Madou, M.; Bossinot, M.; Bergeronb, M.G.; Veres, T. From cellular lysis to microarray detection, an integrated thermoplastic elastomer (TPE) point of care Lab on a Disc. Lab Chip 2015, 15, 406–416. [Google Scholar] [CrossRef]
- Nguyen, H.V.; Nguyen, V.D.; Nguyen, H.Q.; Chau, T.H.T.; Lee, E.Y.; Seo, T.S. Nucleic acid diagnostics on the total integrated lab-on-a-disc for point-of-care testing. Biosens. Bioelectron. 2019, 141, 111466. [Google Scholar] [CrossRef]
- King, D.; Glynn, M.D.; Cindric, S.; Kernan, D.; O’Connell, T.; Hakimjavadi, R.; Kearney, S.; Ackermann, T.; Berbel, X.M.; Llobera, A.; et al. Label-Free Multi parameter optical Interrogation of endothelial Activation in single Cells using a Lab on a Disc platform. Sci. Rep. 2019, 9, 4157. [Google Scholar] [CrossRef]
- Kim, T.; Sunkara, V.; Park, J.; Kim, C.; Woo, H.; Cho, Y. Lab-on-a-disc with reversible and thermally stable diaphragm valves. Lab Chip 2016, 16, 3741–3749. [Google Scholar] [CrossRef]
- Gorkin, R.; Park, J.; Siegrist, J.; Amasia, M.; Lee, B.S.; Park, J.-M.; Kim, J.; Kim, H.; Madou, M.; Cho, Y.-K. Centrifugal microfluidics for biomedical applications. Lab Chip 2010, 10, 1758–1773. [Google Scholar] [CrossRef] [Green Version]
- Ducrée, J. Design Optimization of Centrifugal Microfluidic “Lab-on-a-Disc” Systems towards Fluidic Larger-Scale Integration. Appl. Sci. 2021, 11, 5839. [Google Scholar] [CrossRef]
- Rahman, N.A.; Ibrahim, F.; Aeinehvand, M.M.; Yusof, R.; Madou, M. A Microfluidic Lab-on-a-Disc (LOD) for Antioxidant Activities of Plant Extracts. Micromachines 2018, 9, 140. [Google Scholar] [CrossRef] [Green Version]
- Sayad, A.; Ibrahim, F.; Uddin, S.M.; Cho, J.; Madou, M.; Thong, K.L. A microdevice for rapid, monoplex and colorimetric detection of foodborne pathogens using a centrifugal microfluidic platform. Biosens. Bioelectron. 2018, 100, 96–104. [Google Scholar] [CrossRef]
- Kim, T.-H.; Park, J.; Kim, C.-J.; Cho, Y.-K. Fully integrated lab-on-a-disc for nucleic acid analysis of food-borne pathogens. Anal. Chem. 2014, 86, 3841–3848. [Google Scholar] [CrossRef]
- Sayad, A.A.; Ibrahim, F.; Uddin, S.M.; Pei, K.X.; Mohktar, M.S.; Madou, M.; Thong, K.L. A microfluidic lab-on-a-disc integrated loop mediated isothermal amplification for foodborne pathogen detection. Sens. Actuators B 2016, 227, 600–609. [Google Scholar] [CrossRef]
- Ji, T.; Liu, Z.; Wang, G.Q.; Guo, X.G.; Khan, S.A.; Lai, C.C.; Chen, H.; Huang, S.; Xia, S.M.; Chen, B.; et al. Detection of COVID-19: A review of the current literature and future perspectives. Rev. Biosens. Bioelectron. 2020, 166, 112455. [Google Scholar] [CrossRef] [PubMed]
- Sukas, S.; van Dorst, B.; Kryj, A.; Lagatie, O.; de Malsche, W. Development of a lab-on-a-disk platform with digital imaging for identification and counting of parasite eggs in human and animal stool. Micromachines 2019, 10, 852. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- WHO Newsletter. Soil-Transmitted Helminth Infections. Available online: https://www.who.int/news-room/fact-sheets/detail/soil-transmitted-helminth-infections; https://www.who.int (accessed on 2 March 2020).
- Jourdan, P.M.; Lamberton, P.H.L.; Fenwick, A.; Addiss, D.G. Soil-transmitted helminth infections. Lancet 2018, 391, 252–265. [Google Scholar] [CrossRef] [Green Version]
- Guerrant, R.L. Bench aids for the diagnosis of intestinal parasites-WHO. Parasitol. Today 1995, 6, 238. [Google Scholar] [CrossRef]
- Levecke, B.; Behnke, J.M.; Ajjampur, S.S.R.; Albonico, M.; Ame, S.M.; Charlier, J.; Geiger, S.M.; Hoa, N.T.V.; Ngassam, R.I.K.; Kotze, A.C.; et al. A comparison of the sensitivity and fecal egg counts of the McMaster egg counting and Kato-Katz thick smear methods for soil-transmitted helminths. PLoS Negl. Trop. Dis. 2011, 5, e1201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barda, B.D.; Rinaldi, L.; Ianniello, D.; Zepherine, H.; Salvo, F.; Sadutshang, T.; Cringoli, G.; Clementi, M.; Albonico, M. Mini-FLOTAC, an innovative direct diagnostic technique for intestinal parasitic infections: Experience from the field. PLoS Negl. Trop. Dis. 2013, 7, e2344. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rinaldi, L.; Coles, G.C.; Maurelli, M.P.; Musella, V.; Cringoli, G. Calibration and diagnostic accuracy of simple flotation, McMaster and FLOTAC for parasite egg counts in sheep. Vet. Parasitol. 2011, 177, 345–352. [Google Scholar] [CrossRef] [PubMed]
- Moser, W.; Bärenbold, O.; Mirams, G.J.; Cools, P.; Vlaminck, J.; Ali, S.M.; Ame, S.M.; Hattendorf, J.; Vounatsou, P.; Levecke, B.; et al. Diagnostic comparison between FECPAKG2 and the Kato-Katz method for analyzing soil-transmitted helminth eggs in stool. PLoS Negl. Trop. Dis. 2018, 12, e0006562. [Google Scholar] [CrossRef]
- Chang, S.W.; Cai, W.L.; Shen, H.D.; Yu, K.C. Uncoupling Coriolis Force and Rotating Buoyancy Effects on Full-Field Heat Transfer Properties of a Rotating Channel. J. Vis. Exp. 2018, 140, e57630. [Google Scholar] [CrossRef] [Green Version]
- Happel, J. Low Reynolds Number Hydrodynamics with Special Applications to Particulate Media; Martinus Hijhoff: The Hague, The Netherlands, 1983. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misko, V.R.; Kryj, A.; Ngansop, A.-M.T.; Yazdani, S.; Briet, M.; Basinda, N.; Mazigo, H.D.; De Malsche, W. Migration Behavior of Low-Density Particles in Lab-on-a-Disc Devices: Effect of Walls. Micromachines 2021, 12, 1032. https://doi.org/10.3390/mi12091032
Misko VR, Kryj A, Ngansop A-MT, Yazdani S, Briet M, Basinda N, Mazigo HD, De Malsche W. Migration Behavior of Low-Density Particles in Lab-on-a-Disc Devices: Effect of Walls. Micromachines. 2021; 12(9):1032. https://doi.org/10.3390/mi12091032
Chicago/Turabian StyleMisko, Vyacheslav R., Agata Kryj, Aude-Muriel Tamandjo Ngansop, Sogol Yazdani, Matthieu Briet, Namanya Basinda, Humphrey D. Mazigo, and Wim De Malsche. 2021. "Migration Behavior of Low-Density Particles in Lab-on-a-Disc Devices: Effect of Walls" Micromachines 12, no. 9: 1032. https://doi.org/10.3390/mi12091032