1. Introduction
Accurate attitude measurement is an important technology in navigation, guidance, and control [
1]. In general, the high-precision inertial navigation system (INS) with high cost can obtain the carrier attitude through mechanization. When Global Positioning System (GPS) went into service, some researchers proposed to use GPS multi-antenna (at least three receivers) to realize attitude determination. It is generally believed that carrier phase integer ambiguity resolution (AR) and the choice of the suitable method are the keys to high-precision attitude determination [
2,
3]. As long as the ambiguity is fixed correctly, the attitude can be determined based on the coordinates of the multi-antenna [
4,
5]. These two technologies have their strengths and weaknesses. INS has the advantages of strong anti-jamming ability and comprehensive information output. However, since the navigation results (velocity, position, and attitude) are obtained through integration, the system error will not be reduced but will accumulate with time and eventually affect its performance [
6]. The positioning and attitude determination precision of GNSS multi-antenna is not affected by the duration of use. However, due to radio wave transmission and other factors, the precision is not high enough, and the operating range is limited. According to the above reasons, low-cost GNSS multi-antenna has outstanding advantages over INS if long endurance work is needed in low precision requirements situations such as vehicle attitude determination. It also has broad research and industrialization potential. More attention has been paid to the GNSS-based attitude determination method [
7,
8,
9].
Attitude determination methods include the direct method, least square method, and optimal estimation method based on the Wahba problem [
10,
11]. There is not much difference between these methods in essence, and the precision is nearly the same. Many researchers have also studied the details. Among them, the ambiguity function method (AFM) and least-squares ambiguity decorrelation adjustment (LAMBDA) are considered as typical methods of search technique in coordinate and ambiguity domain respectively, which are widely used for GNSS-based attitude determination [
12,
13].
AFM was proposed by Counselman and Gourevitch (1981) [
14] and then developed by Remondi (1990) [
15], Han (1996) [
16], Juang (1997) [
17] and Caporali (2003) [
18]. In recent years, it is also common to apply it for GNSS attitude determination. Yang et al. (2016) introduced the rotation matrix method to improve AFM and solve GNSS ambiguity resolution [
19]. However, the efficiency of the ambiguity function and the problem of multi-peak are not discussed enough. Wang et al. (2019) improved AFM based on pitch-constrained and search candidates are greatly decreased [
20]. The shortcoming of this method is lacking research on the search step. To address it, Cellmer (2021) proposed a new method of estimating the length of the search step [
21]. The theory of the ambiguity function method has been further improved.
In the research of GNSS attitude determination based on LAMBDA, Teunissen et al. proposed CLAMBDA (Constrained LAMBDA) [
22,
23], they take the baseline length as constraint information to obtain the fixed solutions and attitude effectively. To enrich the related research of baseline constraint, Lu et al. (2019) conducted a detailed experimental analysis on the actual effect of CLAMBDA [
24]. Liu et al. (2016) adopted the restriction of short baseline constraint in dual-frequency carrier phase ambiguity resolution [
25]. Liu et al. (2018) presented an integrated attitude determination method based on an affine constraint [
26]. Gong et al. also improved the LAMBDA method based on baseline vector constraint [
27], but this method needs the assistance of other navigation equipment. Wu et al. (2020) reduced the GNSS-based attitude determination and positioning problems to a joint model with multivariable constraints [
28]. However, the above attitude determination methods based on LAMBDA are unable to use when reliable fixed solutions cannot be obtained. Since the reliability of attitude solutions cannot be guaranteed, a novel method proposed by Li et al. (2018) improved attitude precision by 2.3° [
29]. As in reference [
30], these two manuscripts focus on improving attitude precision through quality control. When GNSS-RTK is unreliable, Zhang et al. (2020) proposed a method based on primary baseline switching to increase the availability of attitude determination [
1]. However, this method cannot be used when more than two antennas in four antennas platforms are unavailable.
In addition to the above methods, some researchers have proposed other information-aided methods for attitude determination. For instance, some researchers consider using INS to supplement GNSS multi-antenna attitude determination. Cong et al. (2015) proposed a micro-electro-mechanical system (MEMS) INS-aided AR to optimize the GPS attitude determination results [
31]. Zhu et al. (2019) fused GNSS multi-antenna and MEMS to acquire high accuracy attitude angles in GNSS challenged environments [
13]. These solutions consider the supplement of MEMS INS when GNSS-RTK is unreliable, but the known relationship between GNSS antennas is not fully utilized.
To sum up, the current GNSS multi-antenna attitude determination methods do not fully explore the characteristics of multi-baseline; even if the least square method is applied, multi-baseline is only taken as redundant observation. Without the assistance of other sensors, GNSS attitude determination cannot be carried out when reliable fixed solutions of three or more antennas are not obtained, resulting in the loss of reliable results in vehicle attitude determination.
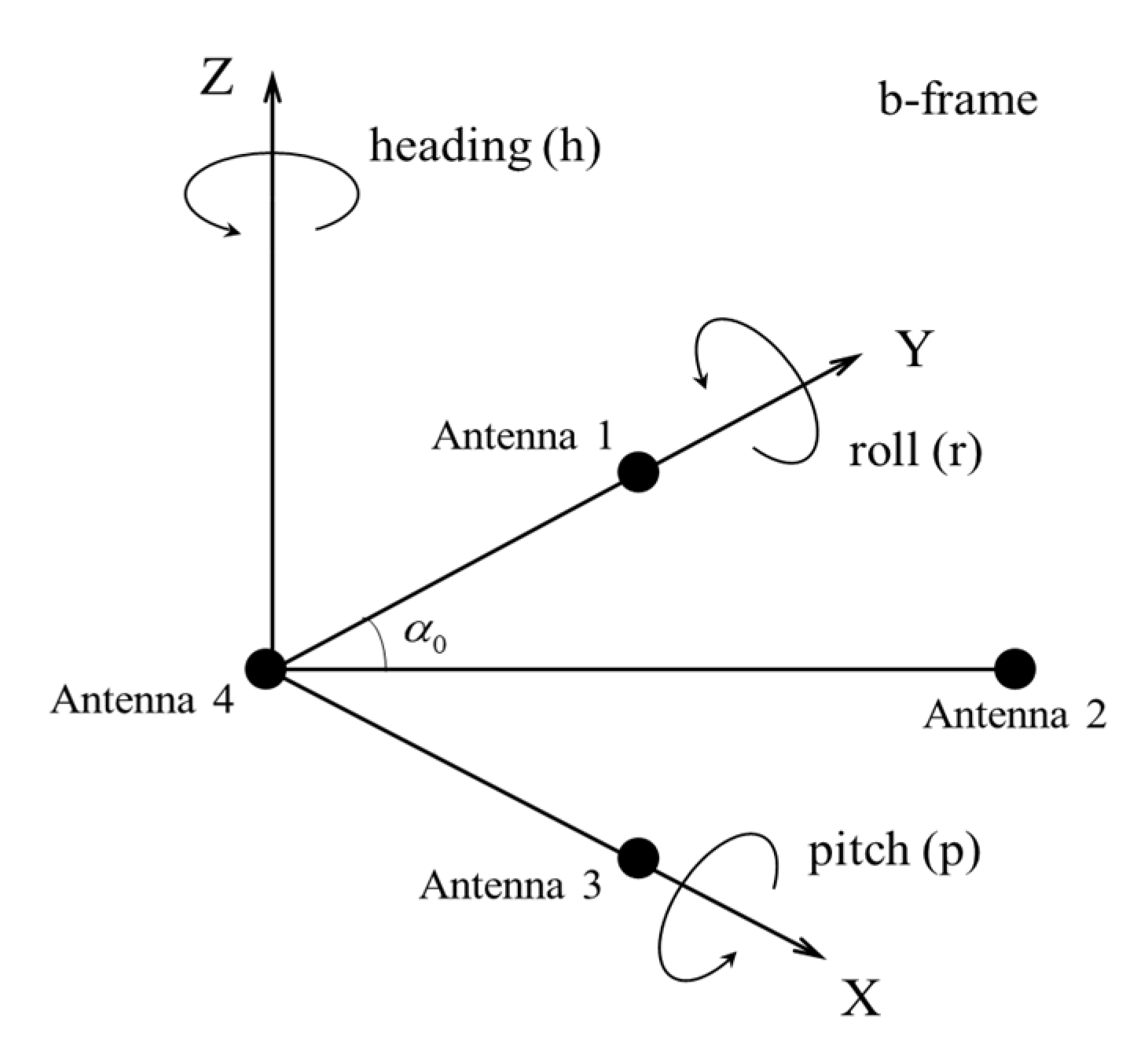
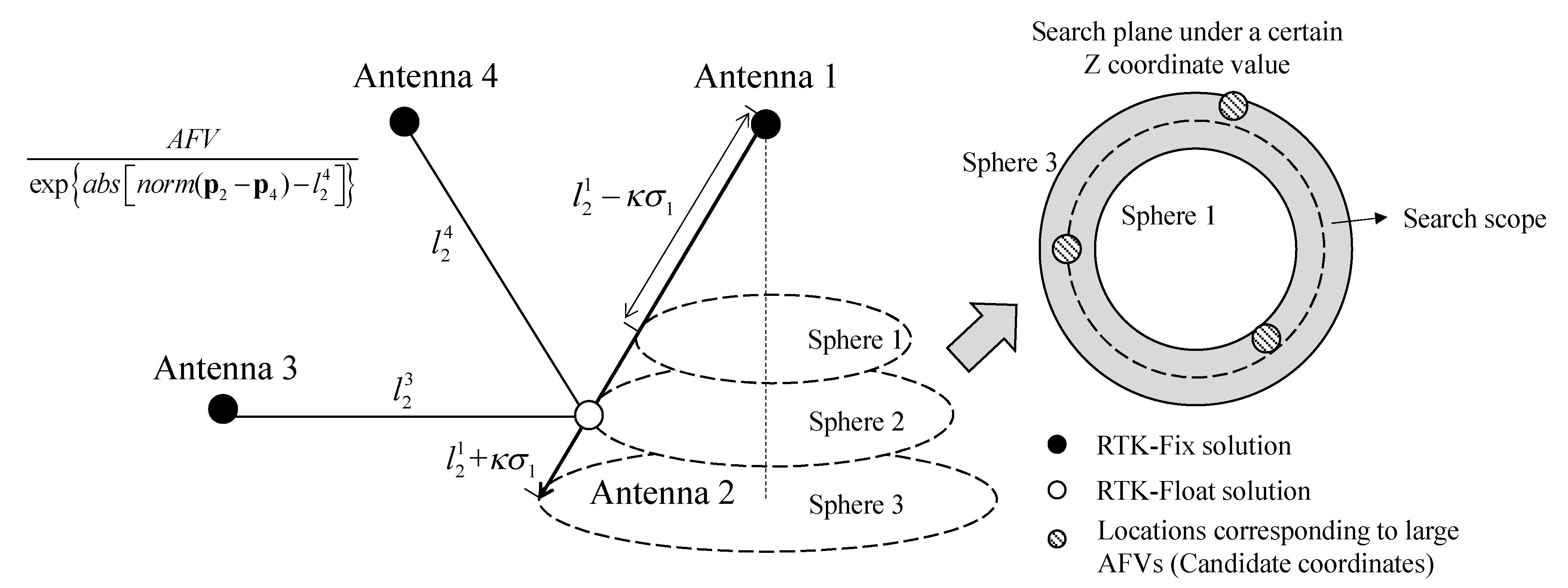
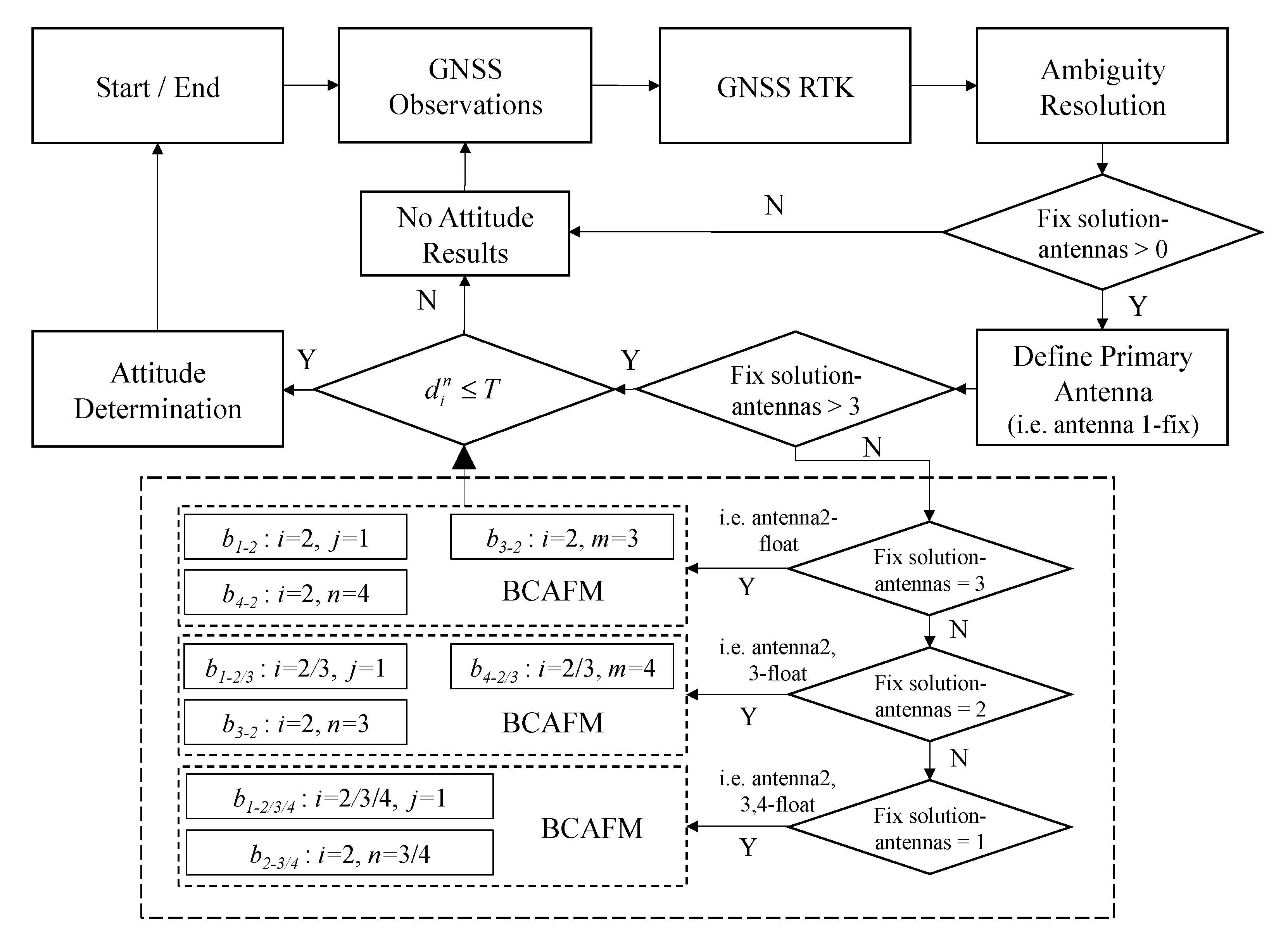
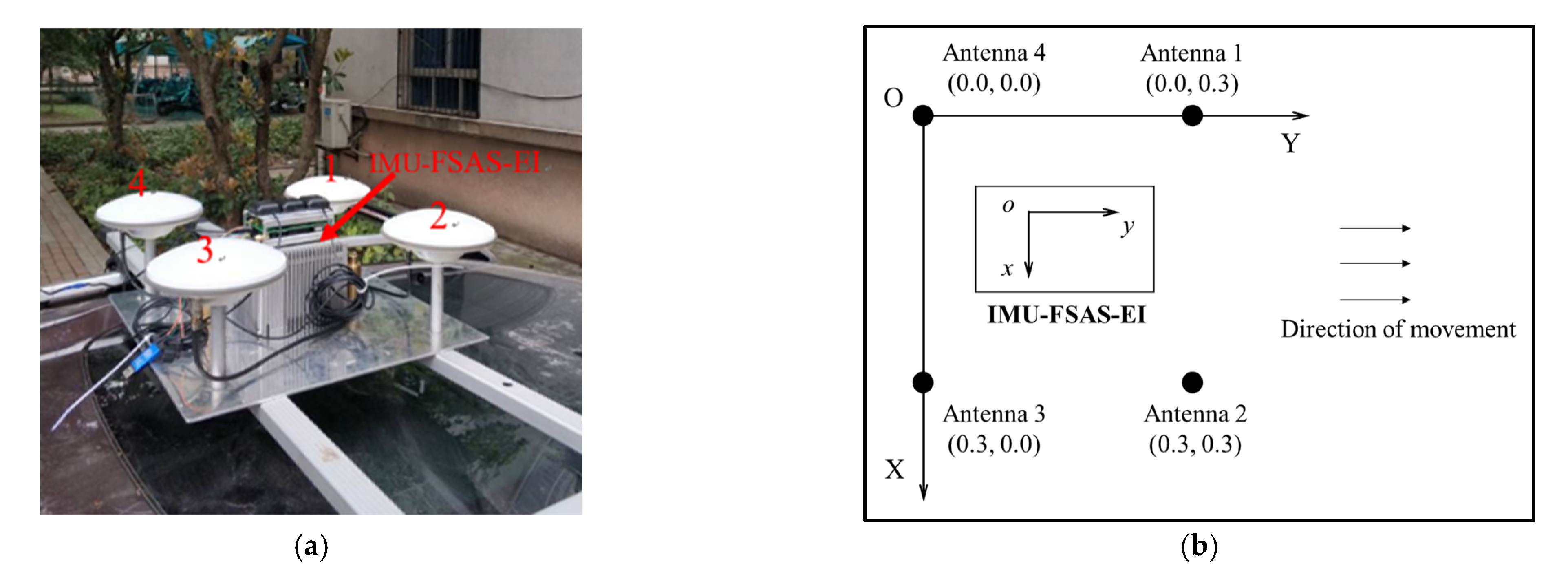
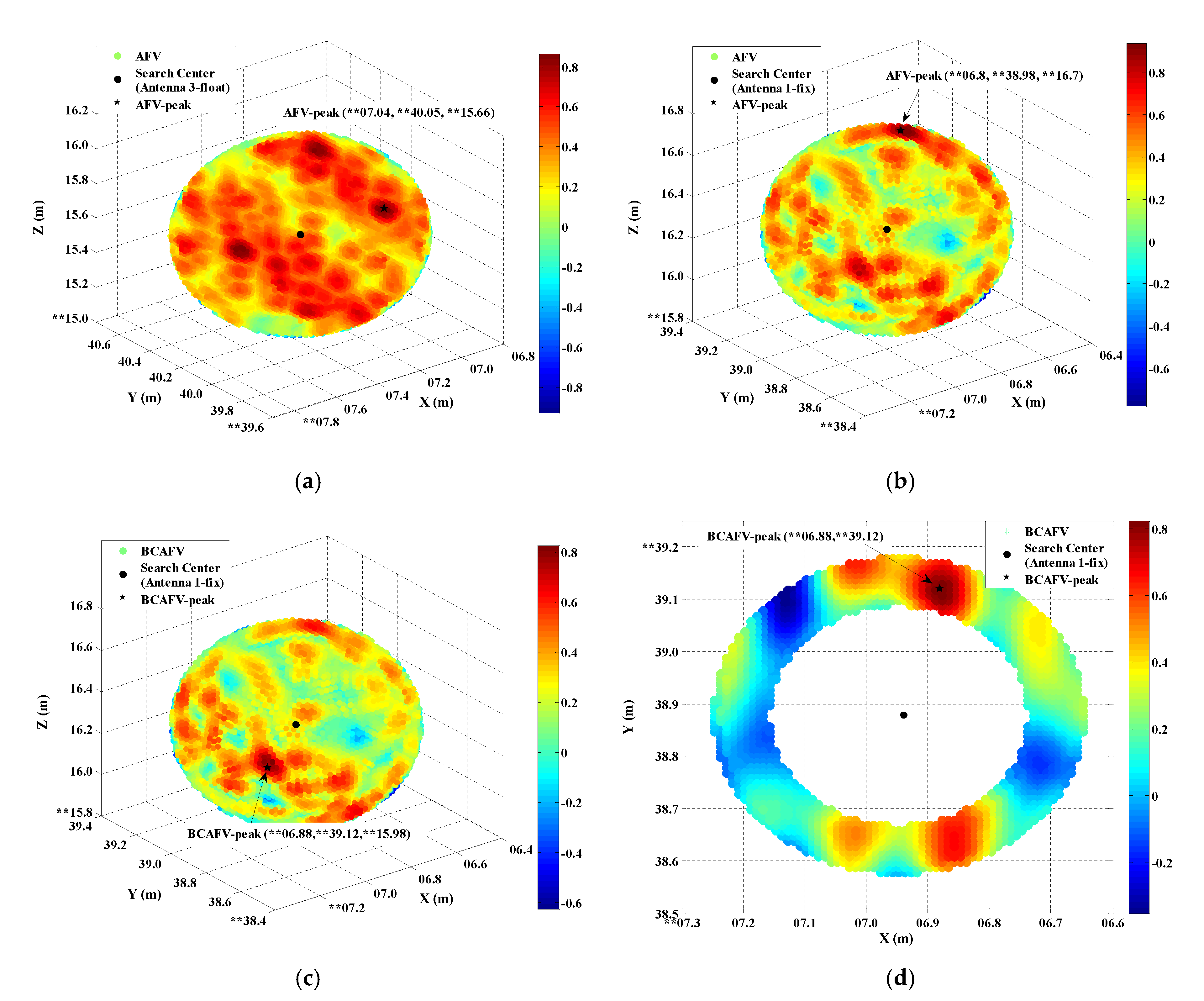
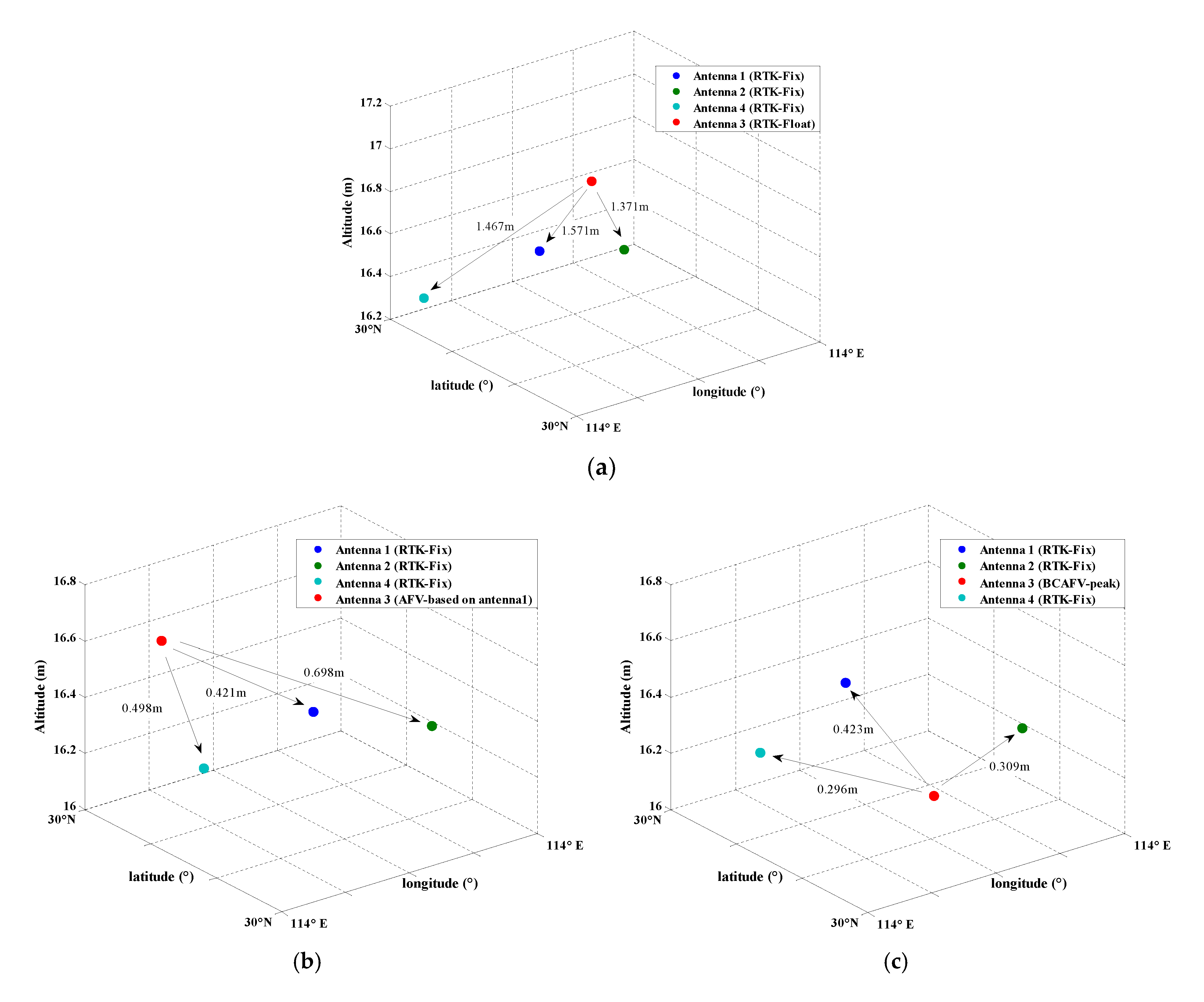
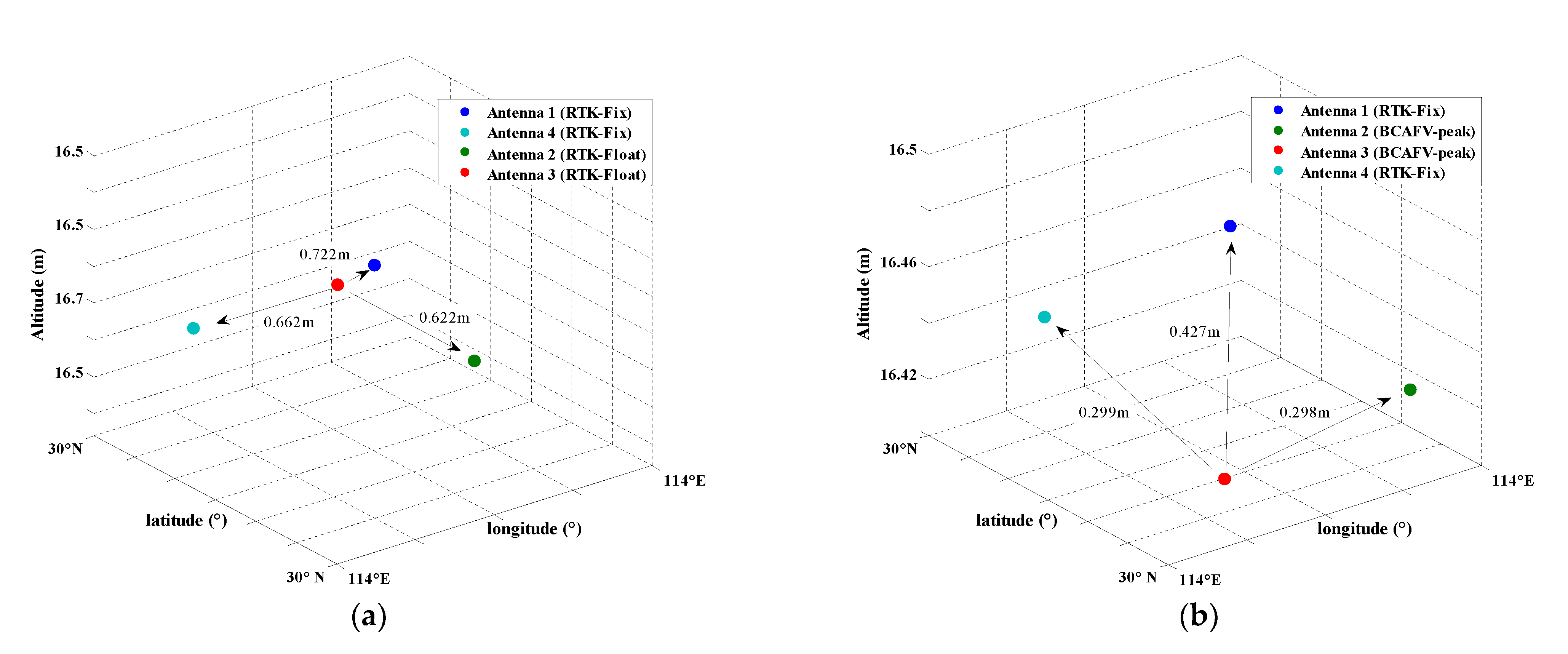
To solve this problem, a vehicle-mounted four-antenna platform is designed in this paper, in which the baseline length between antennas is known. Based on the platform, an ambiguity function method with additional baseline constraints is proposed to optimize the AFV, then reliable positions of four antennas can be obtained. As long as any one of the four antennas gets a reliable RTK fixed solution, the position of the other three antennas can be correctly calculated through BCAFM. Then the baseline vector is constructed for attitude determination. Valid epoch proportion and available attitude information can be increased through this method. As we all know, the two main difficulties that limit the application of AFM are efficiency and multi-peak [
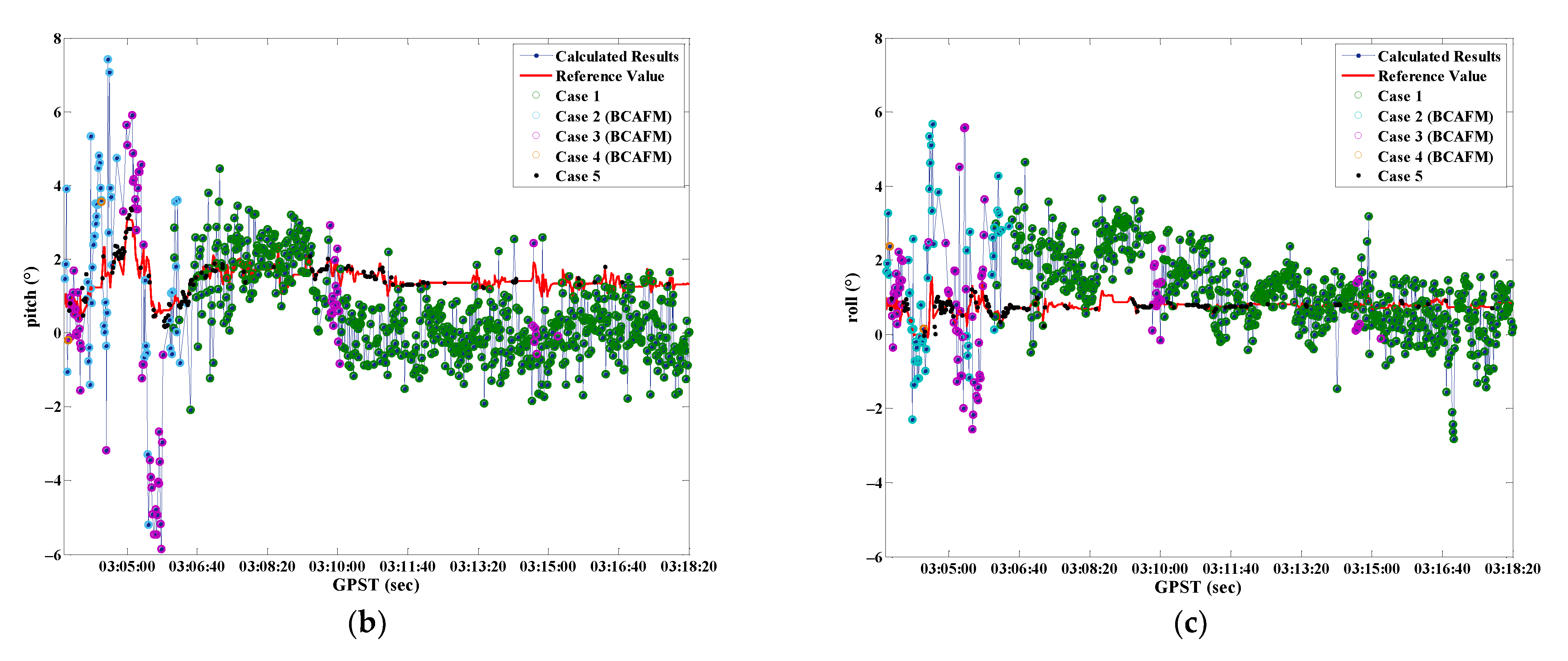
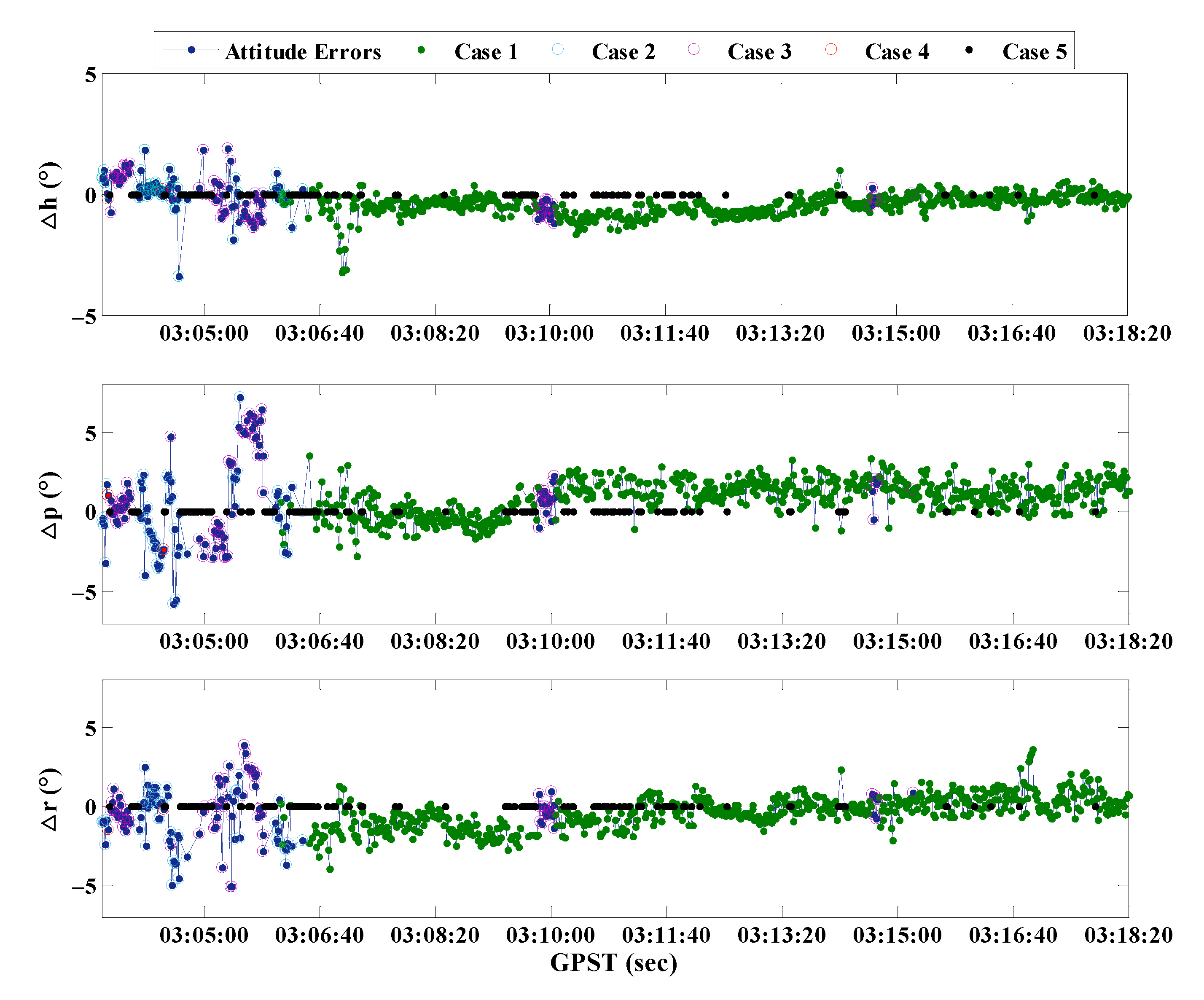
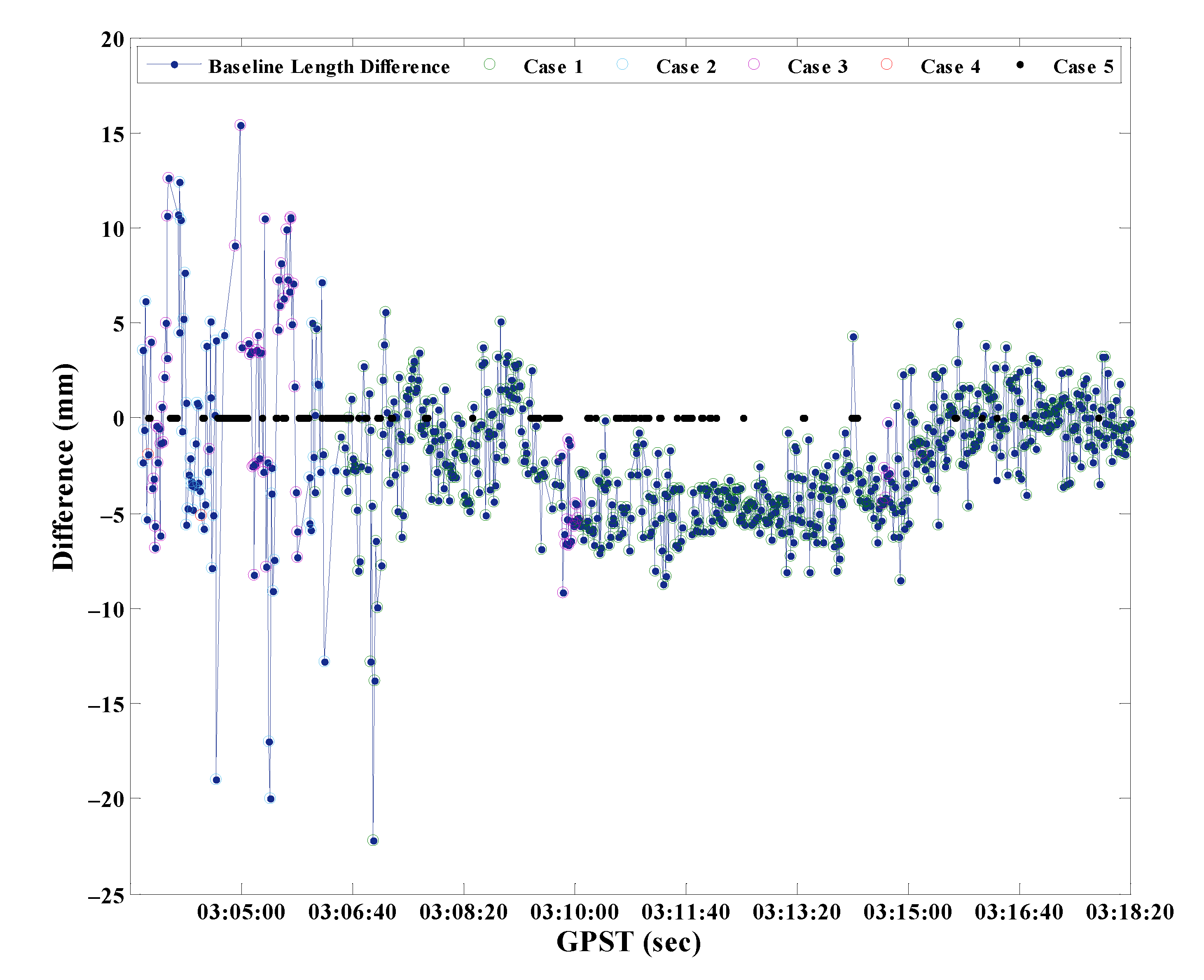
5]. Instead of the traditional AFM search method (sphere search based on a float or single point positioning (SPP) solution), a coordinate searching scope is conducted based on the position of another antenna with a reliable fixed solution. To accelerate the efficiency of AFM, the baseline length constraint is introduced and the loop search scope is established with “baseline length ± mean square error (MSE)” (antenna with fixed solution) as the radius. Besides, to verify the performance of BCAFM, the accuracy of coordinates corresponding to AFV peak is analyzed from both positioning results and attitude determination. The biggest contradiction in positioning is no truth value. In this manuscript, the difference between the known and calculated baseline length is used to verify, which can test the precision of positioning results. For attitude determination, the results of a high-precision SPAN-FSAS integrated navigation system based on tight coupling of GNSS and tactical IMU, are used as the reference for accuracy evaluations in this paper. Combined with four-antenna position distribution figures, baseline difference results, attitude results, and precision analysis, it can be proven that this method can effectively solve the problem of error peak in AFM, which has certain theoretical significance and practical value. BCAFM can also be transplanted to GNSS high-precision dynamic positioning.
According to the investigation, the specific contributions are listed as follows:
(1) A four-antenna hardware platform is built, and a loop search method for matching the geometry of multiple antennas is proposed, which reduces the search range of AFM and greatly improves the calculation efficiency.
(2) An ambiguity function method with additional baseline constraints is proposed to optimize the calculation of AFV. The proposed method can enhance the discrimination between true peak and false peak by AFV optimization, and greatly improve the multi-peak problem of traditional AFM.
(3) The multi-antenna information has been fully applied and the baseline length truth value is introduced into the positioning and attitude determination for verification. The multi-antenna platform also helps to identify cases where ambiguity is incorrectly fixed.
(4) BCAFM can also effectively assist and supplement the positioning results of GNSS-RTK. The increase of attitude information can provide reliable positioning and attitude results in more epochs.
The remainder of the paper is organized as follows.
Section 2 describes the detail of the proposed baseline-constrained ambiguity function method. Experimental results and analysis are illustrated in
Section 3.
Section 4 and
Section 5 show conclusions and discussion.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}