
On-Machine Measurement of Profile and Concentricity for Ultra-Precision Grinding of Hemispherical Shells

Abstract
:1. Introduction
2. Methods
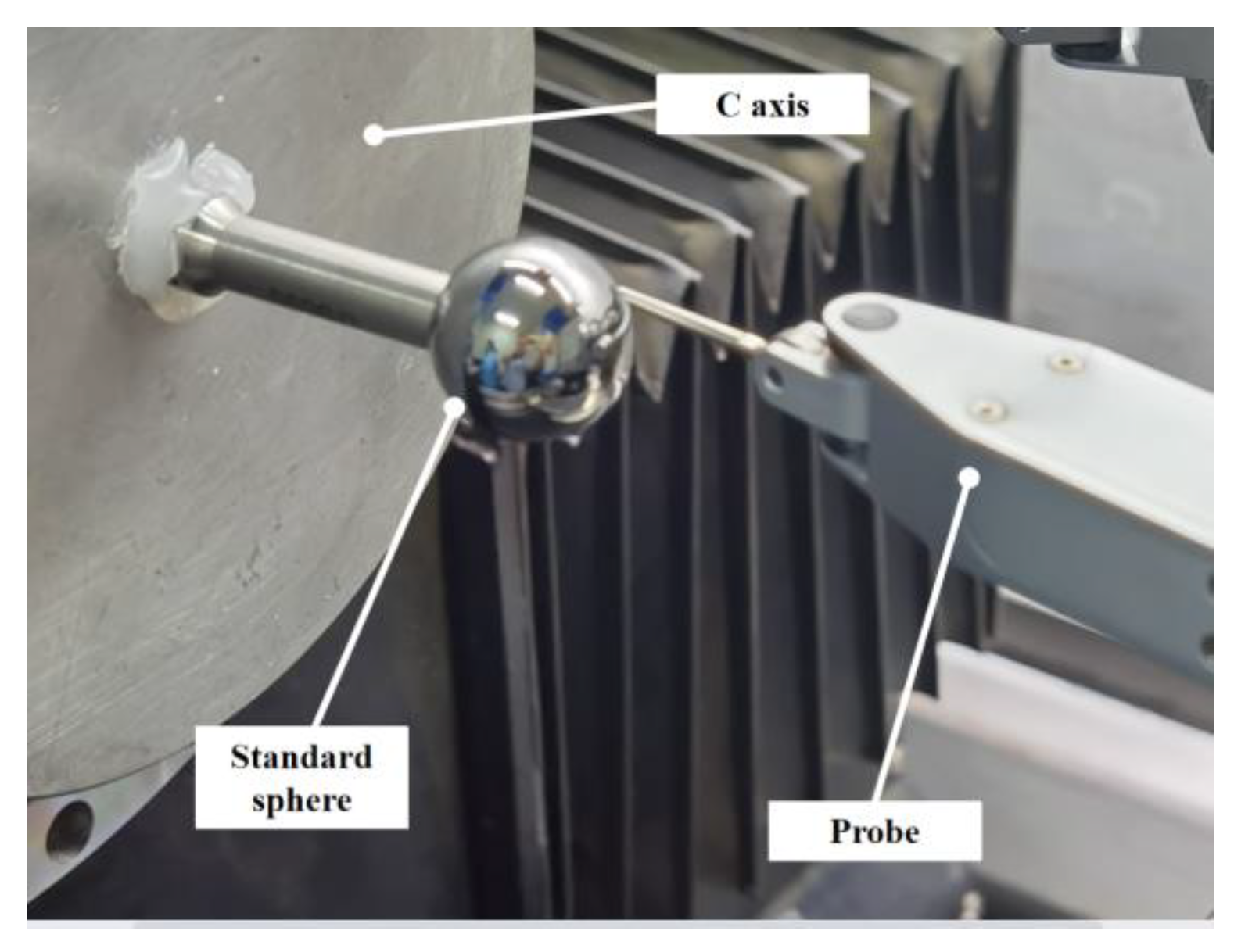
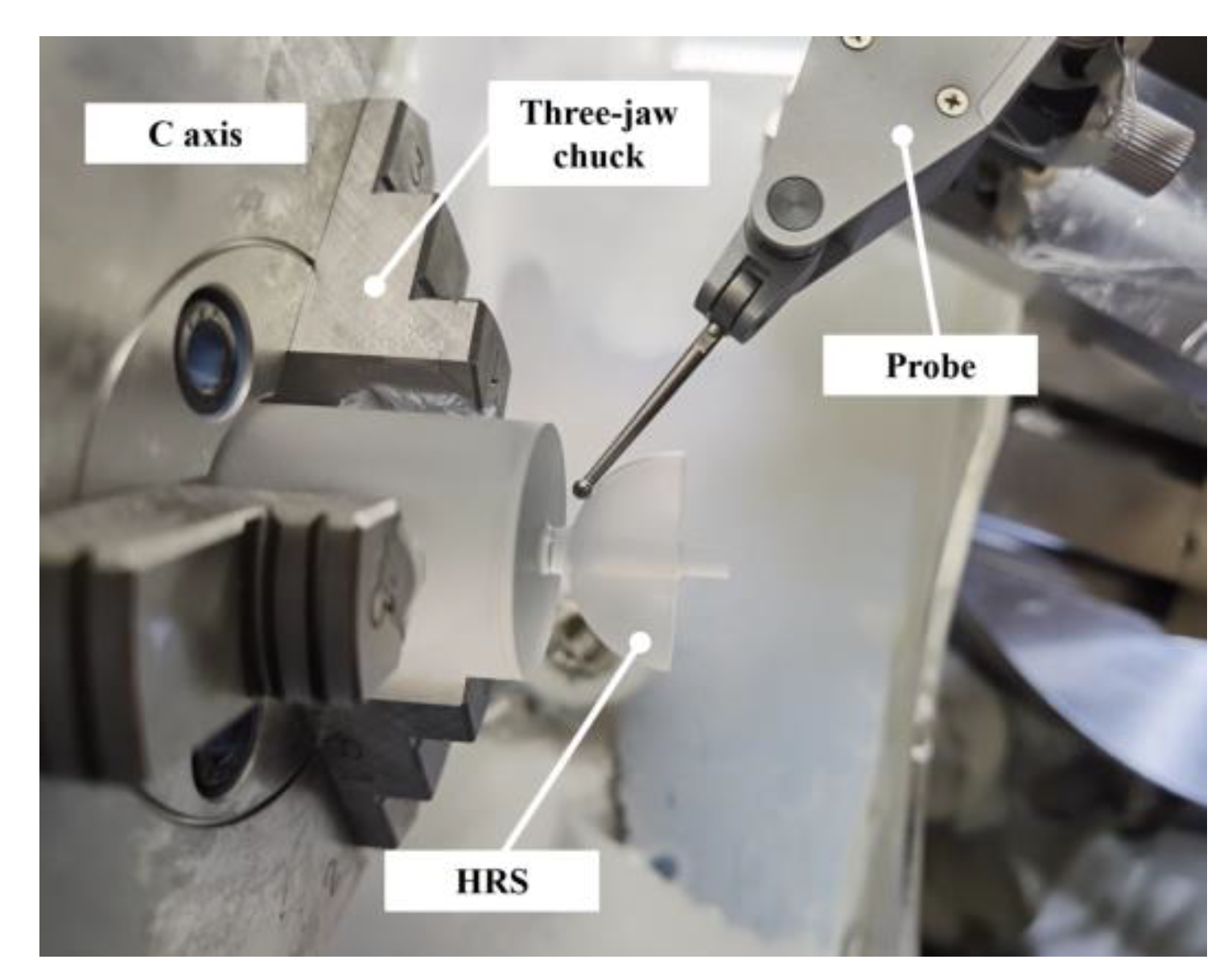
2.1. Measurement System Configuration
2.2. Acquisition Method of the Zero-Position Trigger
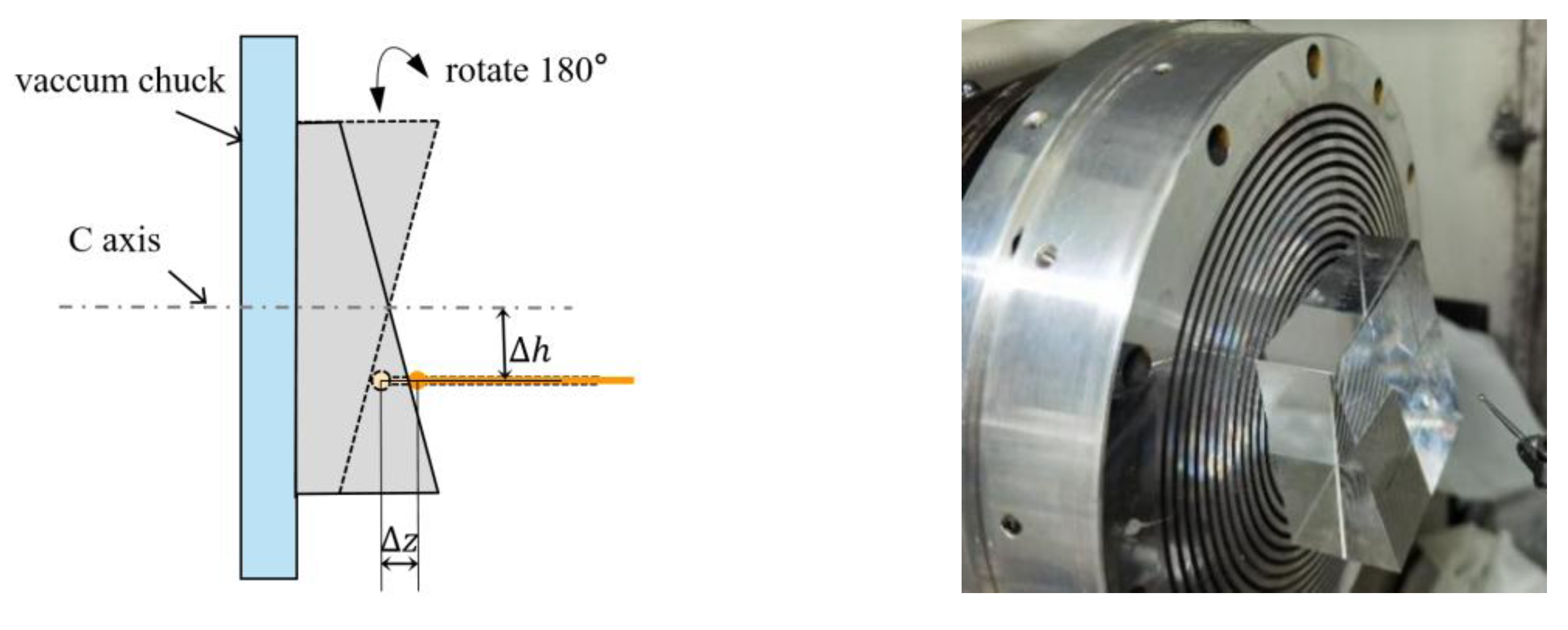
2.3. Alignment of Probe
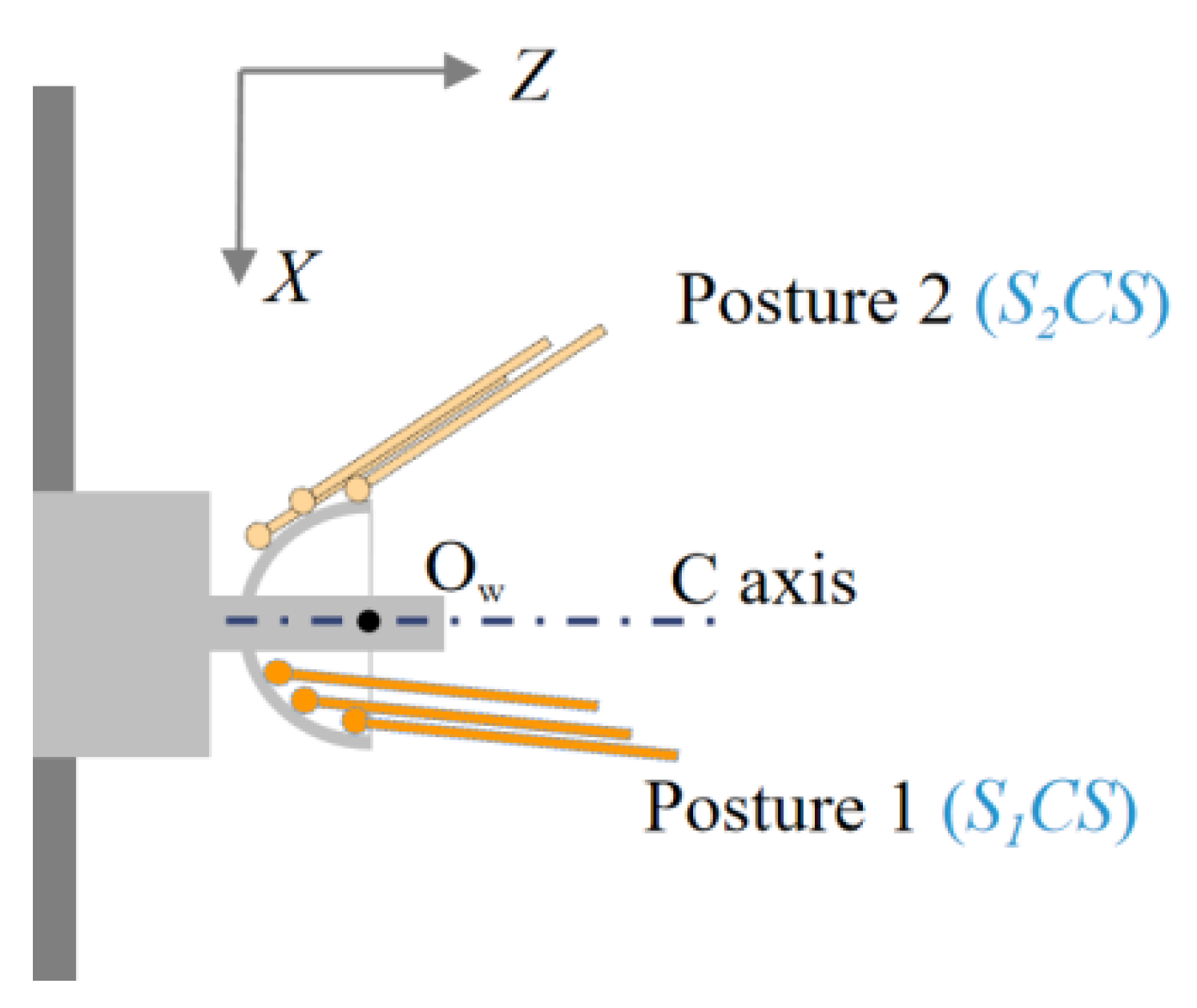
2.4. Unifying the Probe Coordinate Systems
2.5. Measurement Procedure for Profile and Concentricity
3. Results and Discussion
3.1. Repeatability of OMM Systems
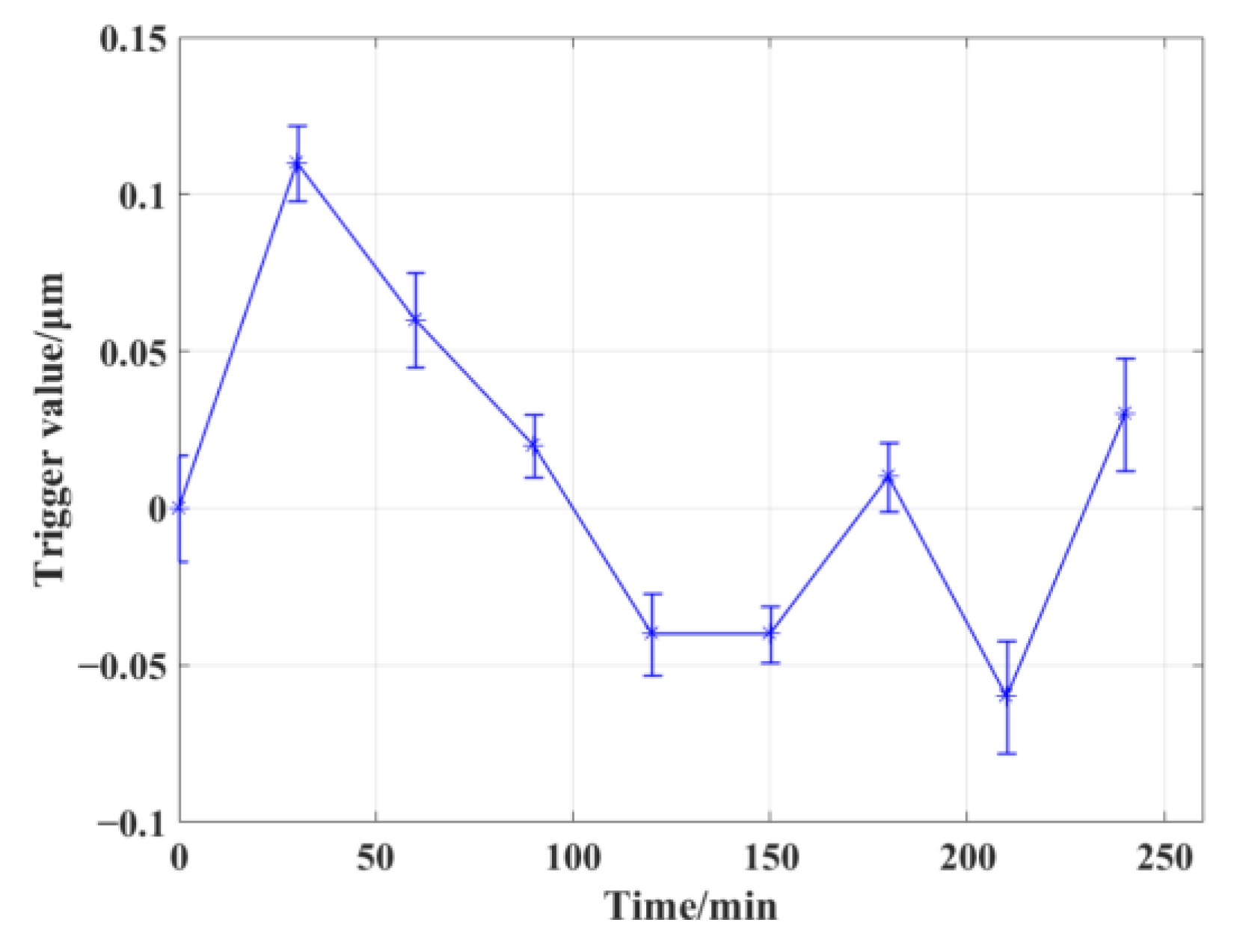
3.1.1. Repeatability Testing of Single Points
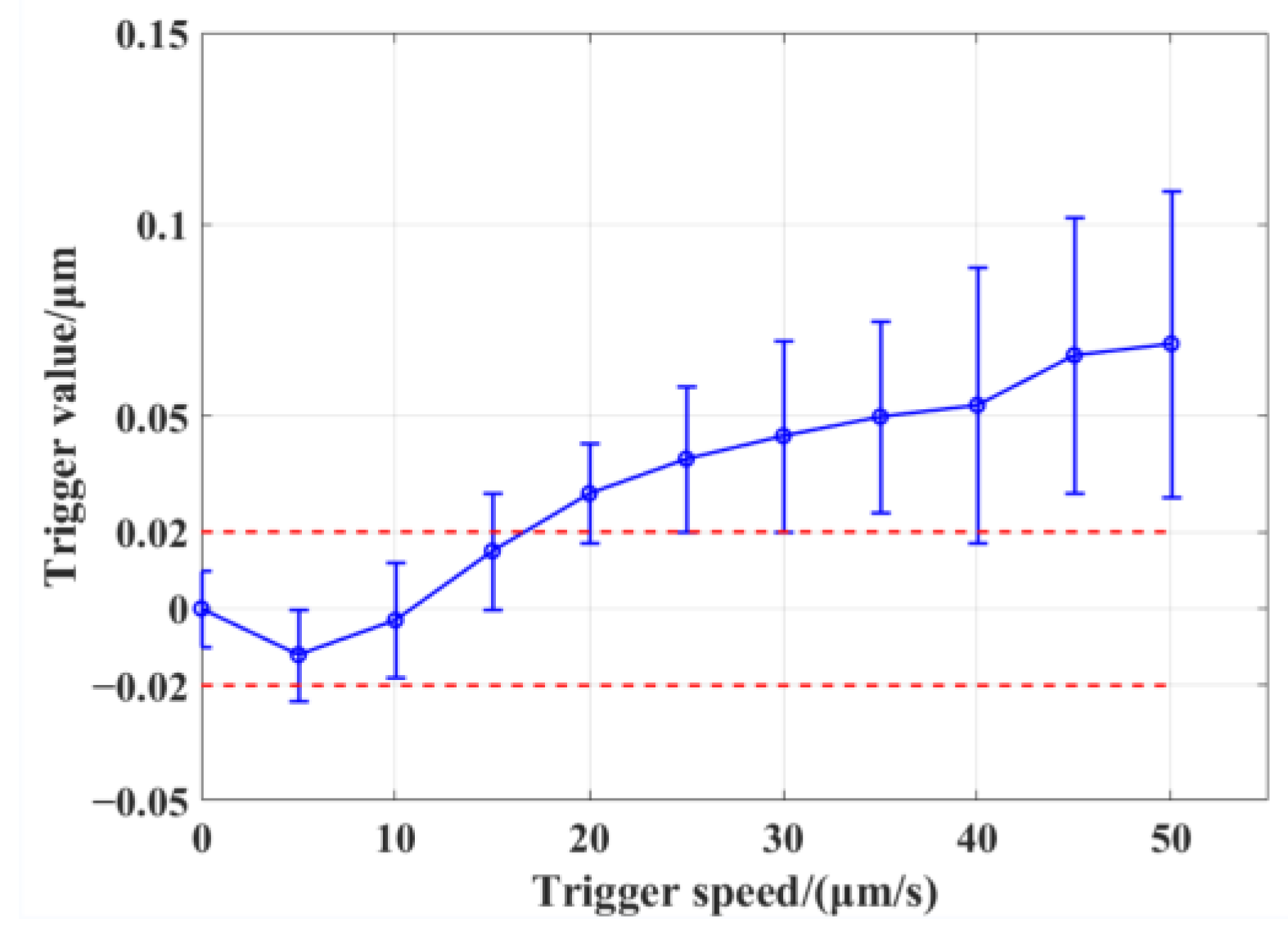
3.1.2. The Setting of the Trigger Speed of the Moving Axis
3.2. Accuracy Test of OMM
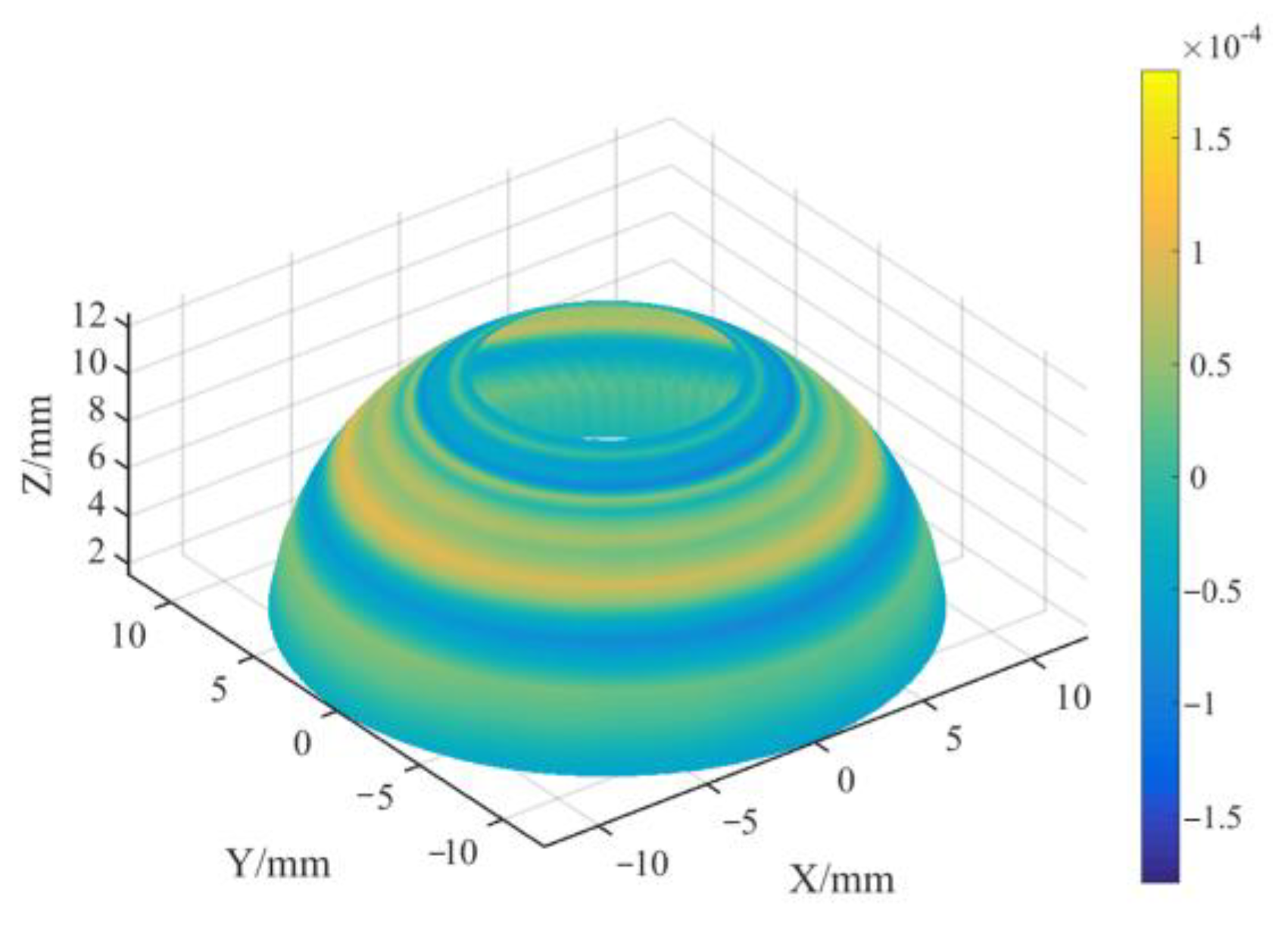
3.2.1. Measurement Accuracy of the Profile
3.2.2. Measurement Accuracy of Concentricity
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rozelle, D.M. The Hemispherical Resonator Gyro: From Wineglass to the Planets. In Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting, San Diego, CA, USA, 8–12 February 2009; pp. 1157–1178. [Google Scholar]
- Brown, T.S. In-Flight Performance of the Cassini Hemispherical Quartz Resonator Gyro Inertial Reference Units. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4630. [Google Scholar]
- Moses, E.I.; McCrory, R.L.; Meyerhofer, D.D.; Keane, C. A new era for high-energy-density physics. Opt. Photonics News 2009, 20, 42–47. [Google Scholar] [CrossRef]
- Ma, X.; Qiu, L.; Wang, Y.; Lu, M.; Zhao, W. High-precision laser differential confocal measurement method for multi-geometric parameters of inner and outer spherical surfaces of laser fusion capsules. Opt. Express 2020, 28, 9913–9928. [Google Scholar] [CrossRef] [PubMed]
- Fess, E.; Bechtold, M.; Wolfs, F.; Bechtold, R. Developments in precision optical grinding technology. In Proceedings of the Optifab, New York, NY, USA, 14–17 October 2013; pp. 96–100. [Google Scholar]
- Chen, W.; Huang, H. Ultra precision grinding of spherical convex surfaces on combination brittle materials using resin and metal bond cup wheels. J. Mater. Process. Technol. 2003, 140, 217–223. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, Q.; To, S.; Guo, B. A further study of wheel normal grinding of hemisphere couples on TiC-based cermet. Int. J. Adv. Manuf. Tech. 2016, 87, 2593–2602. [Google Scholar] [CrossRef]
- Li, D.; Jiang, X.; Tong, Z.; Blunt, L. Development and application of interferometric on-machine surface measurement for ultraprecision turning process. J. Manuf. Sci. Eng. 2019, 141, 1. [Google Scholar] [CrossRef] [Green Version]
- Vacharanukul, K.; Mekid, S. In-process dimensional inspection sensors. Measurement 2005, 38, 204–218. [Google Scholar] [CrossRef]
- Huang, H.; Lei, X.Y.; Wang, J.; Xu, Q.; He, L.Y.; Guo, Y.B. A Machining Error Compensation Method Using On-Machine Profile Measurement in 3-Axis Aspheric Grinding. In Proceedings of the Advanced Materials Research, Chongqing, China, 21 January –23 October 2011; pp. 390–395. [Google Scholar]
- Nouira, H.; El-Hayek, N.; Yuan, X.; Anwer, N. Characterization of the main error sources of chromatic confocal probes for dimensional measurement. Meas. Sci. Technol. 2014, 25, 044011. [Google Scholar] [CrossRef]
- King, C.W. Integrated On-Machine Metrology Systems. In Proceedings of the International Symposium on Ultraprecision Engineering and Nanotechnology (ISUPEN), Japan Society for Precision Engineering Semestrial Meeting 2010 JSPE Autumn Conference, Tokyo, Japan, 20–22 September 2010. [Google Scholar]
- Koike, Y.; Kono, D.; Matsubara, A.; Yamaji, I. In-situ measurement by using a measurement-fused machining system. Int. J. Jpn. Soc. Precis. Eng. 2010, 76, 945–949. [Google Scholar] [CrossRef] [Green Version]
- Nishikawa, S.; Ohno, K.; Mori, M.; Fujishima, M. Non-contact type on-machine measurement system for turbine blade. Procedia Cirp. 2014, 24, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zou, X.; Zhao, X.; Li, G.; Li, Z.; Sun, T. Non-contact on-machine measurement using a chromatic confocal probe for an ultra-precision turning machine. Int. J. Adv. Manuf. Tech. 2017, 90, 2163–2172. [Google Scholar] [CrossRef]
- Shiraishi, M. Scope of in-process measurement, monitoring and control techniques in machining processes—Part 1: In-process techniques for tools. Precis. Eng. 1988, 10, 179–189. [Google Scholar] [CrossRef]
- Renishaw Sensors. Available online: https://www.renishaw.com/en/cmm-hardware--31248 (accessed on 2 September 2022).
- Zeiss CMM Hardware. Available online: https://www.zeiss.com/metrology/products/sensors/on-cmm.html (accessed on 2 September 2022).
- Golby, J. Advances in Inductive Position Sensor Technology. In Sensor Review; Emerald Group Publishing: Bingley, UK, 2010. [Google Scholar]
- Chen, F.; Yin, S.; Huang, H.; Ohmori, H.; Wang, Y.; Fan, Y.; Zhu, Y. Profile error compensation in ultra-precision grinding of aspheric surfaces with on-machine measurement. Int. J. Mach. Tool Manuf. 2010, 50, 480–486. [Google Scholar] [CrossRef]
- Ibaraki, S.; Ota, Y. Error calibration for five-axis machine tools by on-the-machine measurement using a touch-trigger probe. Int. J. Automot. Eng. Jpn. 2014, 8, 20–27. [Google Scholar] [CrossRef]
- Spiezia, G.; Losito, R.; Martino, M.; Masi, A.; Pierno, A. Automatic test bench for measurement of magnetic interference on LVDTs. IEEE Trans. Instrum. Meas. 2011, 60, 1802–1810. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Habchi, C.; Liu, X.; Liu, Y.; Zheng, Y.; Li, X.; Shen, H. Scanning transmission ion microscopy computed tomography (STIM-CT) for inertial confinement fusion (ICF) targets. Fusion. Eng. Des. 2013, 88, 188–194. [Google Scholar] [CrossRef]
- Wang, X.; Xue, S.; Chen, S.; Zhai, D. Stitching interferometric characterization of geometric errors of hemispherical shells. Measurement 2021, 181, 109626. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Workpiece No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Axial concentricity/μm | OMM | 1.31 | −1.55 | 1.22 | −2.55 | 3.52 | 1.95 | 6.2 | 2.92 | −3.02 | 3.83 |
| CMM | 2.47 | −2.23 | 2.79 | −0.84 | 3.25 | 2.98 | 5.82 | 2.91 | −3.91 | 2.36 | |
| Radial concentricity/μm | OMM | 0.23 | 0.11 | 0.33 | 0.45 | 0.22 | 0.25 | 0.15 | 0.52 | 0.35 | 0.42 |
| CMM | 0.28 | 0.34 | 0.54 | 0.15 | 0.22 | 0.30 | 0.33 | 0.35 | 0.39 | 0.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Guan, C.; Dai, Y.; Xue, S. On-Machine Measurement of Profile and Concentricity for Ultra-Precision Grinding of Hemispherical Shells. Micromachines 2022, 13, 1731. https://doi.org/10.3390/mi13101731
Wang Y, Guan C, Dai Y, Xue S. On-Machine Measurement of Profile and Concentricity for Ultra-Precision Grinding of Hemispherical Shells. Micromachines. 2022; 13(10):1731. https://doi.org/10.3390/mi13101731
Chicago/Turabian StyleWang, Yu, Chaoliang Guan, Yifan Dai, and Shuai Xue. 2022. "On-Machine Measurement of Profile and Concentricity for Ultra-Precision Grinding of Hemispherical Shells" Micromachines 13, no. 10: 1731. https://doi.org/10.3390/mi13101731
APA StyleWang, Y., Guan, C., Dai, Y., & Xue, S. (2022). On-Machine Measurement of Profile and Concentricity for Ultra-Precision Grinding of Hemispherical Shells. Micromachines, 13(10), 1731. https://doi.org/10.3390/mi13101731