1. Introduction
Based on the guidance of the basic theory of traditional Chinese medicine, acupoint massage is a method of assisting treatment that has a long history in China for the prevention and treatment of chronic or degenerative diseases, by using different massage techniques such as pressing, kneading, rubbing, pushing, and patting [
1,
2]. It has the effects of promoting blood circulation, dredging meridians, eliminating fatigue, relieving pressure, regulating function, and preventing diseases [
3,
4].
Traditional acupoint massage mostly adopts manual operation, and the work is too heavy for traditional Chinese medicine doctors, while it is also difficult for them to ensure a consistency of massage process and force [
5]. With the development of technology, researchers continue to develop various automatic massage devices. For example, the researchers from Waseda University and Asahi University in Japan developed a robot called WAO-1 with a massage scheme that can collect and analyze facial data, so as to control two six-degrees-of-freedom (DOF) mechanical arms and realize facial rehabilitation [
6,
7]; an Israeli company developed a massage robot called Whee Me that looks like a tracked vehicle and uses a tilt sensor to realize massage through its movement [
8]; Hu Lei developed a massage robot including a positioning platform and end-effector, which uses position change to control the force, so as to achieve the purpose of massage [
9]; Lu Shouyin developed a traditional Chinese medical massage robot composed of an adjustable massage platform and two five-DOF manipulators [
10]; Jenjira Chimsa designed a massage device based on the ischemic compression massage method [
11]; the researchers from Chengdu University of information technology developed a wearable massage robot Anmoji, which can massage the head, neck, back, legs, and feet [
12]; Huang, Yuancan developed a four-DOF humanoid manipulator that can realize three massage actions: pressing, kneading, and plucking [
13].
From the above research status, it can be seen that the existing automatic massage devices are mostly for large massage areas, which makes the overall structure of the massage device large, cumbersome, and complex. However, there is a clear argument for the following: while, patients can move their limbs, and, thus, can very accurately place the limbs relative to large massaging machines, it is difficult to continuously target the massage force on a point in a specific way, which will lead to inaccurate massaging and low massage efficiency. In addition, devices for acupoint massage will have multiple-DOF, resulting in a complex structure and difficulty in miniaturization. However, it is difficult for a large-scale massage devices to massage a single acupoint of the limbs. Considering some massage devices mentioned above and in the literature [
14,
15], it can be concluded that the current large-scale massage devices are mostly for back massage. Besides, most of the existing massage devices directly realize the massage function through mechanical extrusion or vibration. Moreover, they lack the guidance of traditional Chinese medical massage theory and do not simulate massage techniques such as pressing, kneading, and releasing of traditional Chinese medical massage, so it is difficult to ensure the curative effect of acupoint massage [
16]. Furthermore, the current massage devices mostly use a rigid structure [
17] when contacting with the human body, which makes it difficult to ensure the essential safety of human–machine interaction in the process of massaging.
To solve the problems existing with the current massage devices, this paper designs a flexible uni-acupoint massage device that can accurately apply massage force to the uni-acupoint of limbs and simulate the acupoint massage process of traditional Chinese medicine. The rest of this paper is organized as follows: the second section analyzes the acupoint massage techniques of traditional Chinese medicine, and obtains the technical indicators and work flow for an acupoint massage device; in the third section, the mechanism and control system of flexible uni-acupoint massage device are designed; in the fourth section, the human–machine contact dynamic model of uni-acupoint massage device is established; in the fifth section, the human–machine contact force is simulated and experimentally analyzed; finally, application of the uni-acupoint massage device is verified.
2. Analysis of Acupoint Massage Techniques in Traditional Chinese Medicine
The curative effect of uni-acupoint massage in traditional Chinese medicine is closely related to the parameters of acupoints, direction, strength, action frequency, and action duration [
18,
19]. After collecting some main data on traditional Chinese medical acupoint massage, it was found that different masseurs have certain rules on the main parameters of acupoint massage. According to the massage techniques described in [
20,
21], the data shown in
Table 1 are summarized, which shows the main parameters of typical pressing methods and kneading methods for limb massage.
The ‘pressing method’ is to press the patient’s acupoints with fingers or palms and gradually press down with force. The ‘kneading method’ uses the rib surface of the finger, thenar, or palm to perform circular kneading on the acupoints. As can be seen from
Table 1, the pressing method and kneading method are movements with 1-DOF. The pressing method moves vertically along the normal direction of the acupoints, and kneading method rotates along the tangential plane of the acupoints. In terms of massage force, the massage force is less than 80 N. There are great differences in the frequency of the massage methods, in which the frequency of finger pressing is 3–10 times/min and the frequency of finger kneading is 60–80 times/min.
In the actual massage process, the masseur will use different massage techniques alternately, to achieve the effect of all-round massage on the human tissue [
22]. For example, when massaging a uni-acupoint on the limbs, the commonly used technique of a masseur is a combination of pressing, kneading, and releasing. That is, first press and hold the acupoint with the finger pulp for a period of time. Then, the action of finger kneading is to press and hold the acupoint with the finger pulp and rotate it. Finally, releasing is the action of separating the fingers from the acupoints, so as to relax the acupoints. The purpose of alternating different massage techniques is to prevent the acupoints from becoming insensitive or even vulnerable to damage due to maintaining the same massage method for a long time. Long-term massage can obtain a therapeutic effect. The uni-acupoint massage device designed in this paper simulates the acupoint massage process of the above traditional Chinese medical massage. First, the head of the massage device applies force downward perpendicular to the plane where the acupoint is located, and the force is strictly controlled in the range 10–80 N, from light to heavy, and when reaching the maximum contact force, it is maintained for 10 s, to simulate finger pressing. Then the massage head makes a continuous rotary motion to drive the subcutaneous tissue to produce a corresponding motion, so as to generate friction between the tissue layers. The force of rotation is uniform and strictly controlled in the range of 10–80 N, the rotation speed is 60 rpm, and the total rotation time is 10 s, simulating the action of finger kneading. Finally, it slowly withdraws the force, lets the human tissue relax for 10 s, and repeats the above process. The whole process combines the characteristics of finger pressing and finger kneading, which has a good effect on eliminating blood stasis, accumulation, and regulating blood circulation for local pain acupoints. At the same time, constant-pressure static and no-load relaxation processes are added to the massage process to realize the strong-weak-strong change process of human stimulation, so that the human tissues can fully digest the effect of the process; and so is does not cause damage due to a sudden high load. The technical indicators of the entire process are shown in
Table 2.
4. Establishment of a Contact Dynamic Model
In order to analyze the massage force applied by the device to the acupoints during acupoint massage, it is necessary to establish an acupoint massage device–human body coupling dynamic model. Two models of the acupoint massage device and human skin tissue should be considered.
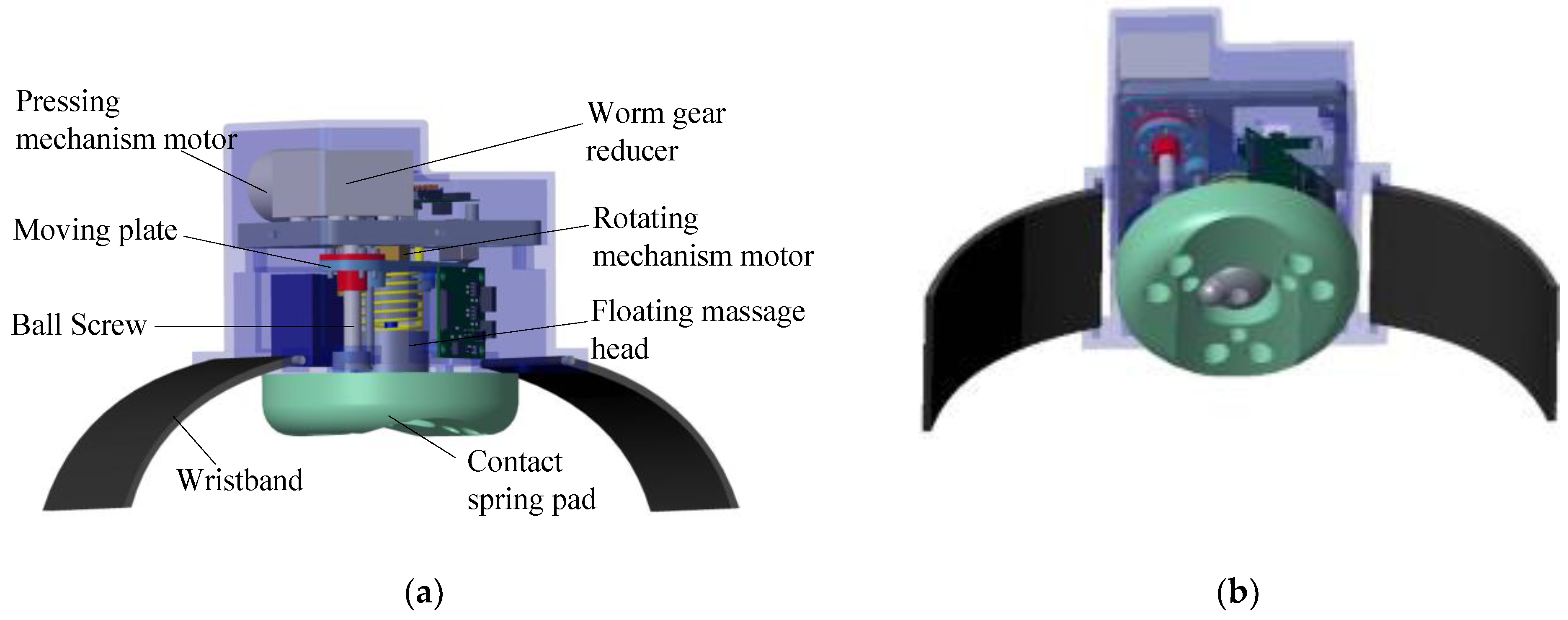
Since the uni-acupoint massage device is based on the series elastic actuating principle, the influence of the damping term can be ignored; a simplified dynamic model of the acupoint massage device is shown in
Figure 6. That is, the motor of the pressing mechanism changes the position
S of the mobile platform
M1 through the worm gears, correspondingly drives the compression of the spring
K1, and finally causes the massage head
M2 to move, so as to output a force controlled by the compression amount of spring
K1 to the massage head.
Human skin is composed of layers (epidermis, dermis, and subcutaneous tissue) with different components and thicknesses. Each layer has a specific mechanical effect. Its model is complex and changeable, and it is difficult to accurately test and analyze the specific pressure generated by the human body when the acupoint massage device is working. However, according to the Kelvin model, human skin mainly shows viscoelasticity when subjected to an external force, so its action model can be simplified and made equivalent to a single-layer viscoelastic model: contact stiffness
K2 is used to represent its elastic part, and viscous damping
D is used to represent its viscous part, as shown in
Figure 7 [
25].
Equations (1) and (2) can be used to calculate the values of contact stiffness and viscous damping coefficient in the equivalent model of human skin [
26]. Taking the forearm of the upper limb as an example, the relevant parameters of the forearm skin were obtained through a dynamic micro imprinting experiment (forearm skin contact stiffness
K1 = 165.02 n/m, viscous damping coefficient
D = 0.22 ns/m).
When the device acts on human skin, an acupoint massage–human body equivalent dynamic model can be obtained through the mechanical model and the equivalent model of human skin pressure, as shown in
Figure 8.
In the series elastic mechanism, the output force
F is directly proportional to the shape variable
∆X of the elastic element, that is,
Through the stress analysis of load
M2, it can be obtained
where
x1 represents the displacement of the moving plate
M1,
x2 represents the displacement of massage head
M2;
K1 and
K2 represent the spring stiffness and the equivalent stiffness coefficient of human skin tissue in the uni-acupoint massage device, respectively;
b represents the equivalent damping coefficient of human skin tissue;
is the derivative of displacement of mass block
M2 with respect to time;
is the derivative of
with respect to time.
The system shown in
Figure 8 was analyzed by using the state space method, and the state vector
z was defined to correspond to the displacement of mobile platform
M1, the displacement, and speed of load
M2, respectively:
Differentiating the state vector
z with respect to time, the system can be organized into first-order differential equations of each state quantity:
The state space of the uni-acupoint massage device human skin tissue coupling system has the following input equation:
where
A is the system state matrix,
B is the input matrix, and
u is the input vector.
For the system model, the displacement of the massage head M2 is the actual compression amount ∆X of the spring in the uni-acupoint massage device. Therefore, z2 in the state vector is selected as the output of the system.
The output equation of state space is
where
C is the output state matrix and
D is the output matrix.
Substitute Formula (9) into Formula (8) to work out the massage force applied to the skin by the uni-acupoint massage device.
5. Massage Force Simulation and Experimental Analysis
5.1. Friction Experiment
According to the man–machine contact dynamic model in
Section 3, a theoretical simulation model is established to simulate and analyze the human–machine contact force. In the simulation, the movement speed of the moving plate in the massage device is 0.85 mm/s, and the stiffness coefficient of the spring in the uni-acupoint massage device is 3.96 N/mm. The stiffness coefficient of human skin tissue is 165.02 N/m, and the damping coefficient is 0.00026 Ns/mm. The mass of the massage head is 0.0217618 kg.
The simulation results are shown in (
Figure 9). The abscissa in the Figure is the moving distance of the moving plate driven by the pressing motor, and the ordinate is the pressing force. The black straight line is the pressure when the massage device contacts the rigid contact surface, and the red curve is the pressure simulation result when the massage device contacts the simulated human skin tissue. It can be seen from the Figure, that when the contact surface is a rigid plane, the contact force is directly proportional to the moving distance of the moving plate (i.e., the moving distance of the massage head). When the contact plane simulates human skin tissue, the output load of the massage device shows a certain fluctuation under the influence of viscoelastic damping. When the displacement is within 1 mm, the pressing amplitude is higher than the time acting on the rigid contact surface for a part of the time, due to the influence of contact stiffness, and the amplitude gap gradually increases with the increase of displacement. At 10 mm displacement, the gap reaches 1.88 N, which is 4.75% lower than the contact force of the rigid plane.
To further verify the massage force exerted on acupoints by the uni-acupoint massage device, an experimental platform was set up, as shown in
Figure 10. The experimental platform included stents, an uni-acupoint massage device, a silicon rubber plate, and a force sensor. The top surface of the uni-acupoint massage device was fixed on the bracket, and the other side was in contact with silicone rubber; with silicone rubber as a substitute for skin. A six-dimensional force sensor was used to detect the massage force exerted by the uni-acupoint massage device. In the experiment, the moving plate in the uni-acupoint massage device was controlled to move at the same speed of 0.85 mm/s, and the pressing pressure of the six-dimensional force sensor along the pressing direction was recorded, as shown in the blue curve in the figure.
In the experiment, the total weight of the prototype and silica gel pad was about 10 N, which needs to be removed from the recorded force data. It can be seen from the figure that the experimental results match the simulation data of the simulated skin tissue, and the goodness of fit R2 is 0.9809. At the initial stage of starting the massage device, the output force of the prototype experiment was slightly less than that of the human skin simulation; when the moving position of the moving plate from 3 to 7 mm, the experimental results were approximately equivalent; when it was close to 10 mm, the experimental output force of the prototype became gradually less than the simulation results. Compared with the simulation data of the simulated skin tissue, the error was mainly caused by mechanical transmission error and model error between the silicone rubber and real skin tissue. During the whole experiment, the peak output load of the uni-acupoint massage device was 33.71 N. Compared with the results of the rigid plane simulation, the peak difference of output load was 5.89 N, which was reduced by 14.9%.
In the uni-acupoint massage device designed in this paper, the controller adjusts the duty cycle of the control signal PWM2 when the motor is pressed down by reading the value of the keys, so as to achieve the purpose of adjusting the moving distance of the moving plate. The duty cycle of the PWM2 signal corresponding to key2 and key3 is 2 and 3 times that of key1, and control the motor, to drive the moving plate to move at a constant speed that is 2 or 3 times the speed of key1 for a certain period of time. If the acting surface is a rigid contact surface, the moving distance of the moving plate corresponding to key2 and key3 is 2 and 3 times that of key1, and the pressure increases exponentially. However, in contact with human skin tissue, the pressure has non-linear variation. As can be seen from
Figure 9, although there is a certain error, the pressure is still nearly 2 times and 3 times. For acupoint massage, the size of the massage force is effective within a certain range, and the control accuracy of the force does not need to be very high. Compared with the cost of other uni-acupoint massage devices, the method of adjusting the massage force selected in this paper, based on the series elastic actuating principle, is desirable.
5.2. Wearing Experiment
Wearing experiments were carried out on three healthy male volunteers aged 20, all of whom gave informed consent. As shown in
Figure 11, the uni-acupoint massage device was fixed on the forearm with the belt, and the three keys were used to test the human body feeling when the massage forces of different size were run for two minutes (in order to prevent muscle fatigue at the acupoint, the interval of each experiment was 30 min).
From the feedback of volunteers, it was shown that wearing the device feels good and does not excessively affect body movement. With the increase of the selected massage force, the massage feeling obviously changed. When using key1, volunteers said they felt a feeling similar to touching; when using the key2, the volunteers said they had an obvious feeling of pressing and kneading and felt more relaxed in the process; when using key3, volunteers said that they felt a stronger force than when pressing key2, and one of them felt slight pain when the massage time was close to two minutes.
The same experiment was carried out with the uni-acupoint massage device fixed on the leg, and the results were similar to those above. A comparative experiment between healthy and non-healthy people is indeed a very meaningful experiment, but it needs a long observation period, which will be the focus of our subsequent research.
To sum up, the acupoint massage device designed in this paper can basically meet the needs of different people for acupoint massage of the limbs.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}