
Design and Optimization of a New Alternating Electromagnetic-Field-Generation System for an Inverted Microscope


Abstract
:1. Introduction
2. Mechanism Design and Analytical Modeling
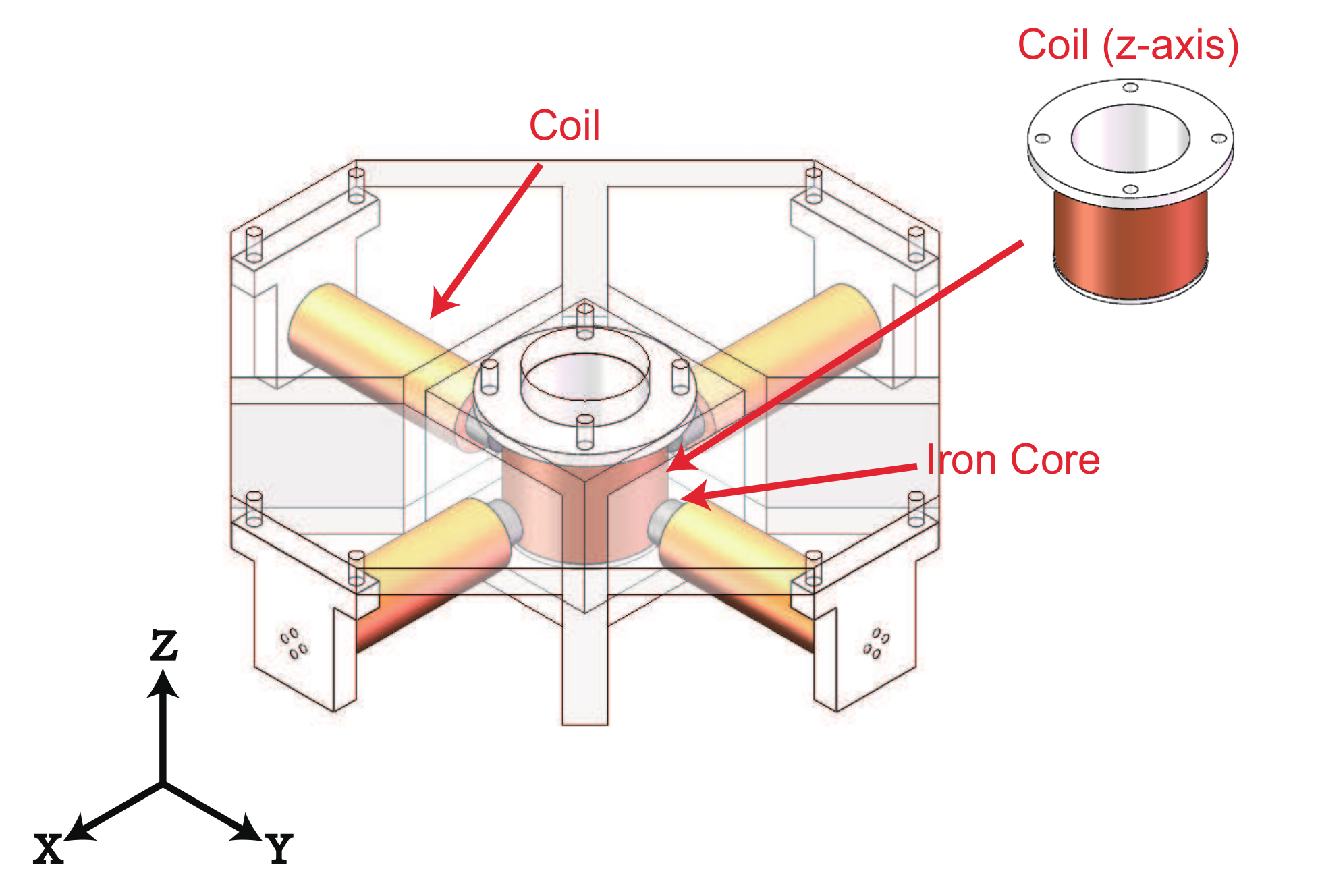
2.1. Mechanism Design of the Alternating Electromagnetic Field Generation System
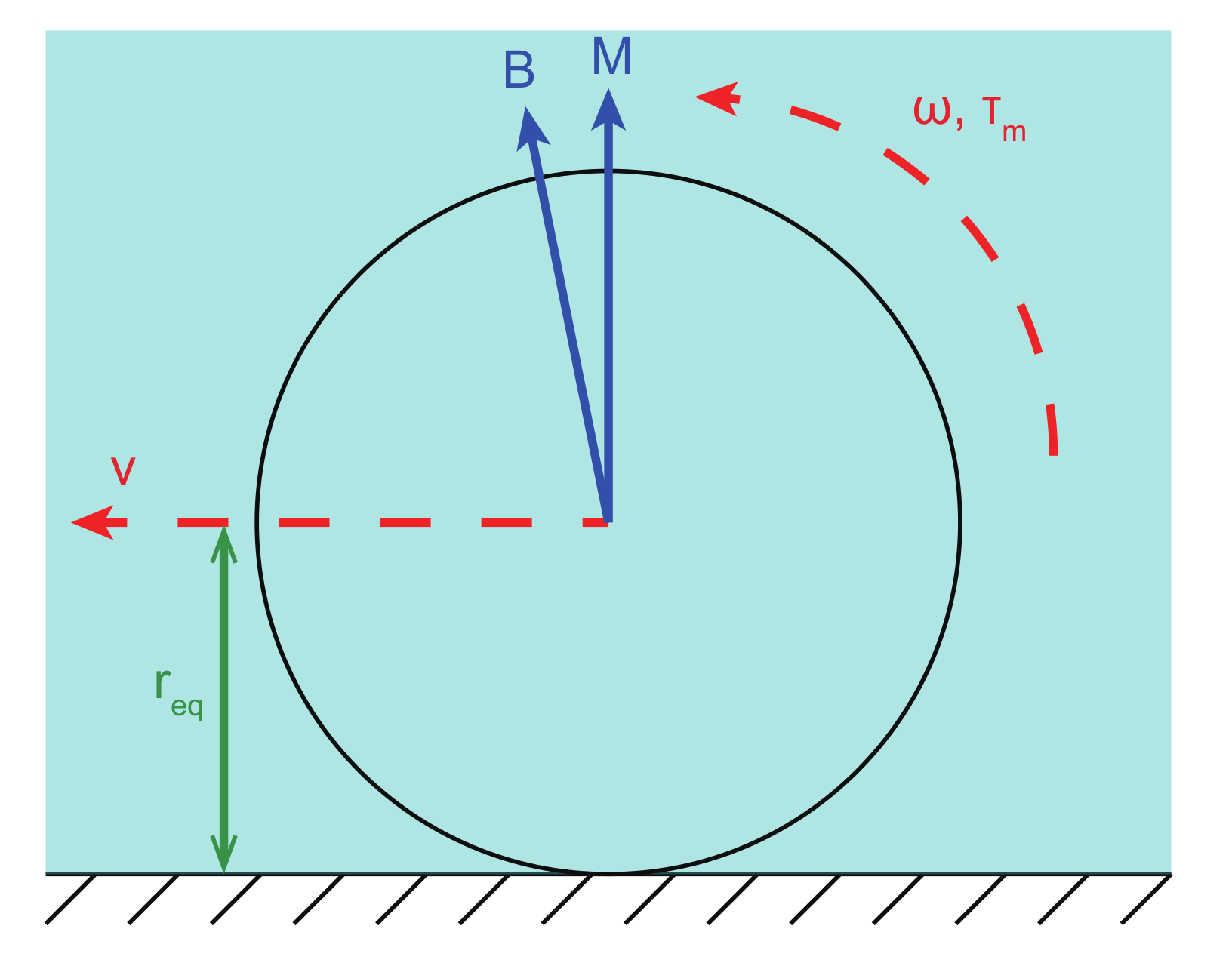
2.2. Modeling of Magnetic Field and Rotating Object
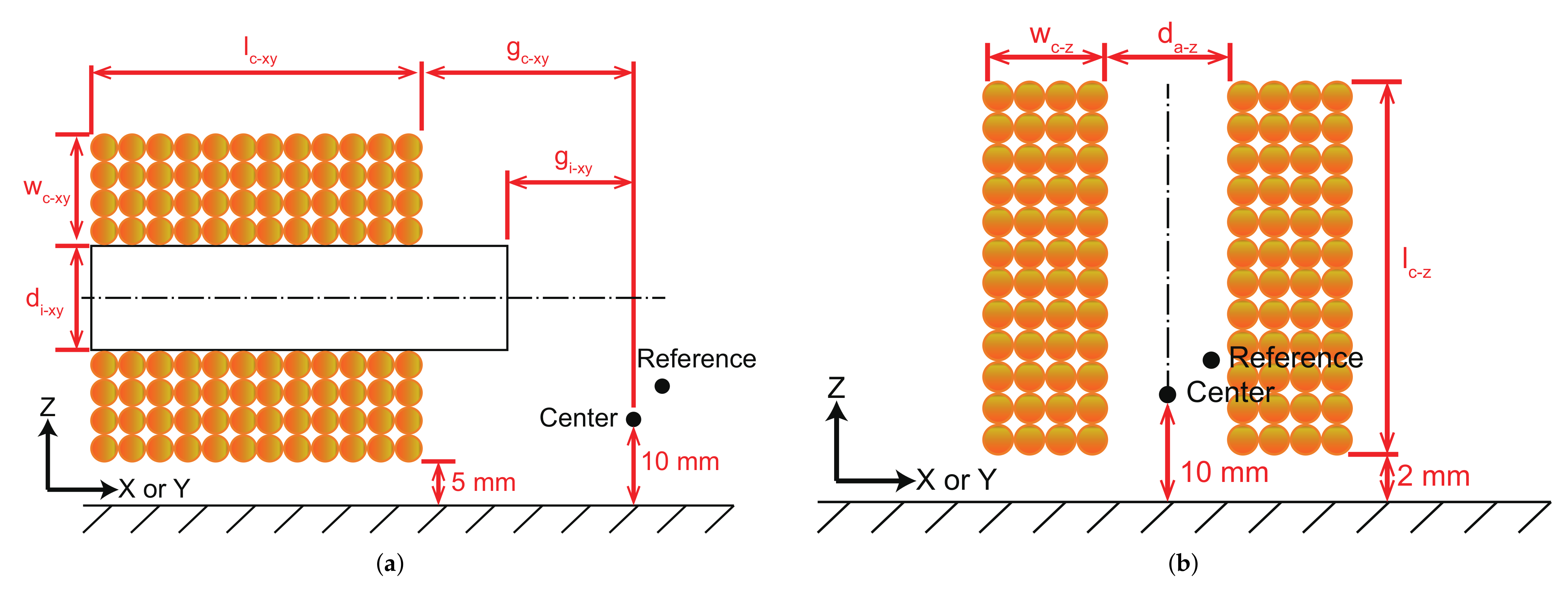
2.3. Modeling of Geometric and Electric Performance
3. System Parameter Optimization
3.1. Optimization Setup
3.2. Optimization Result
4. Prototype Fabrication and Performance Test
4.1. Prototype Fabrication and Experimental Setup
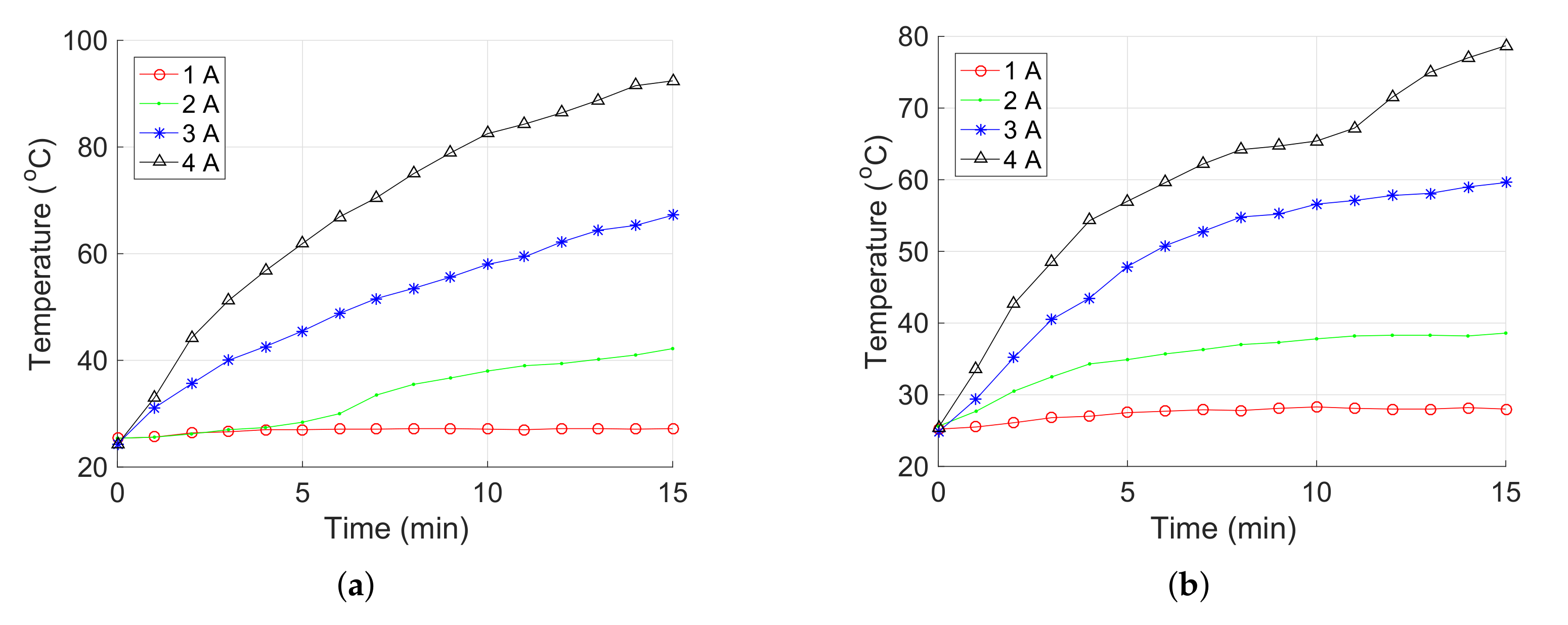
4.2. Performance Test of the Continuing Working Time
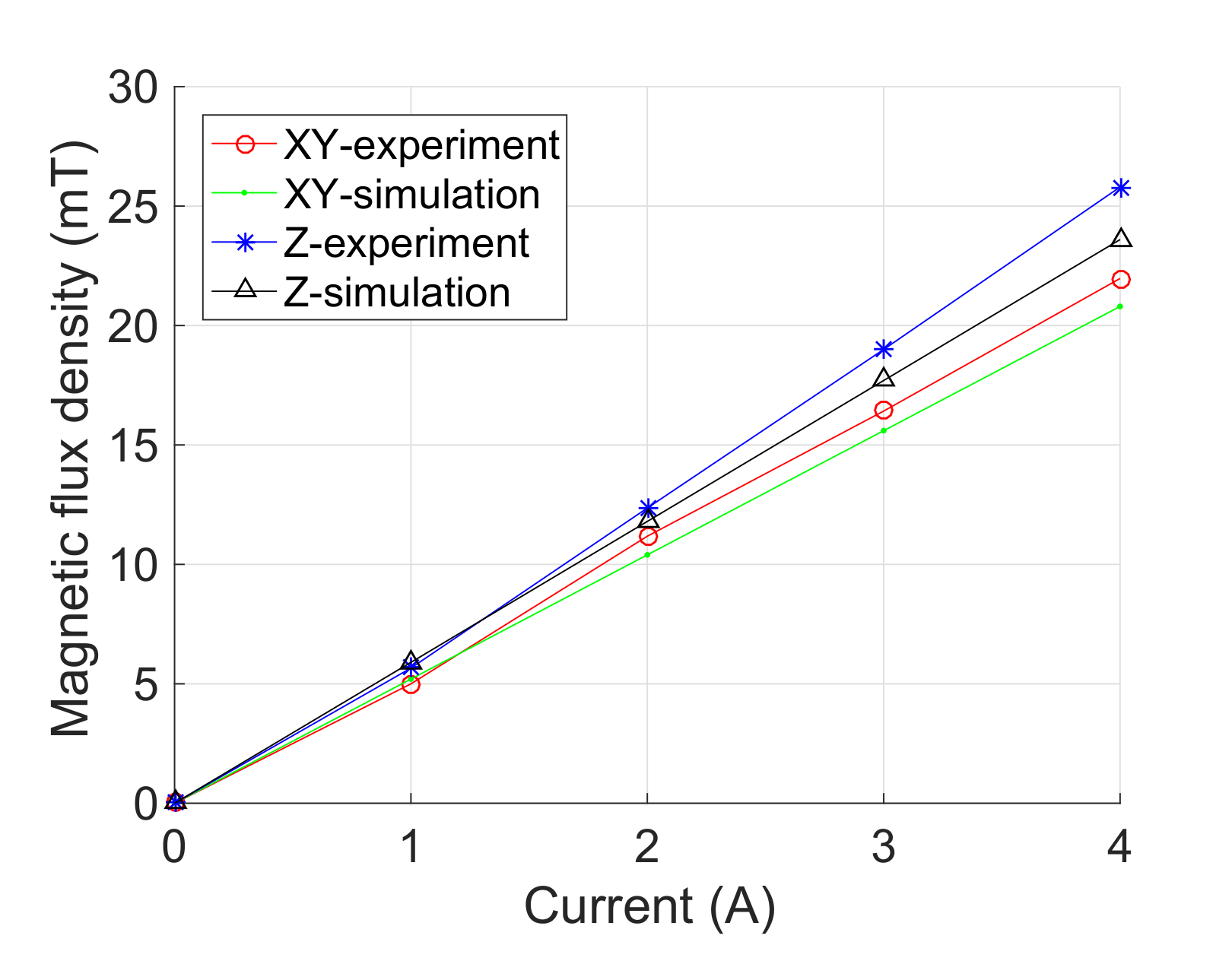
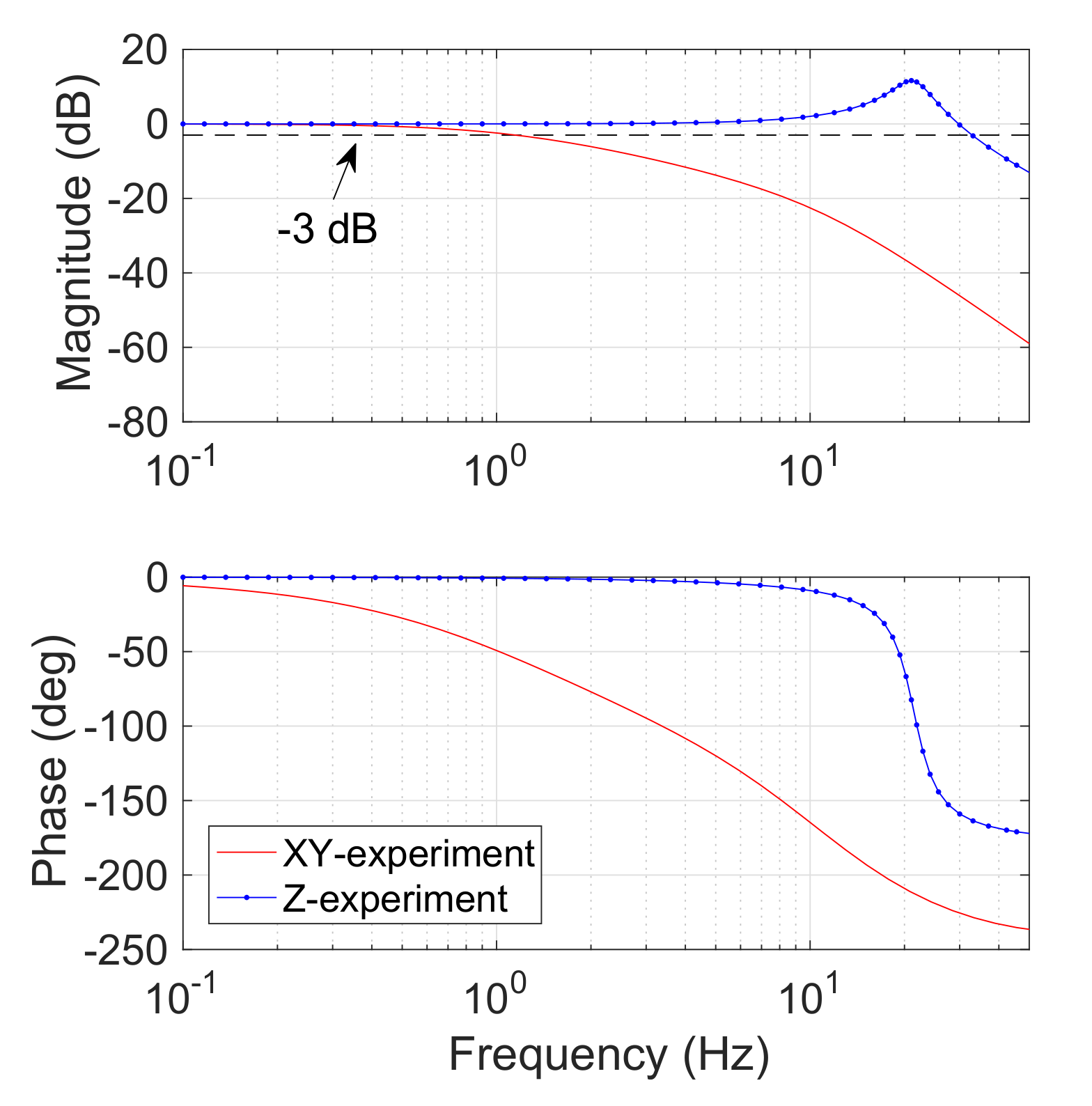
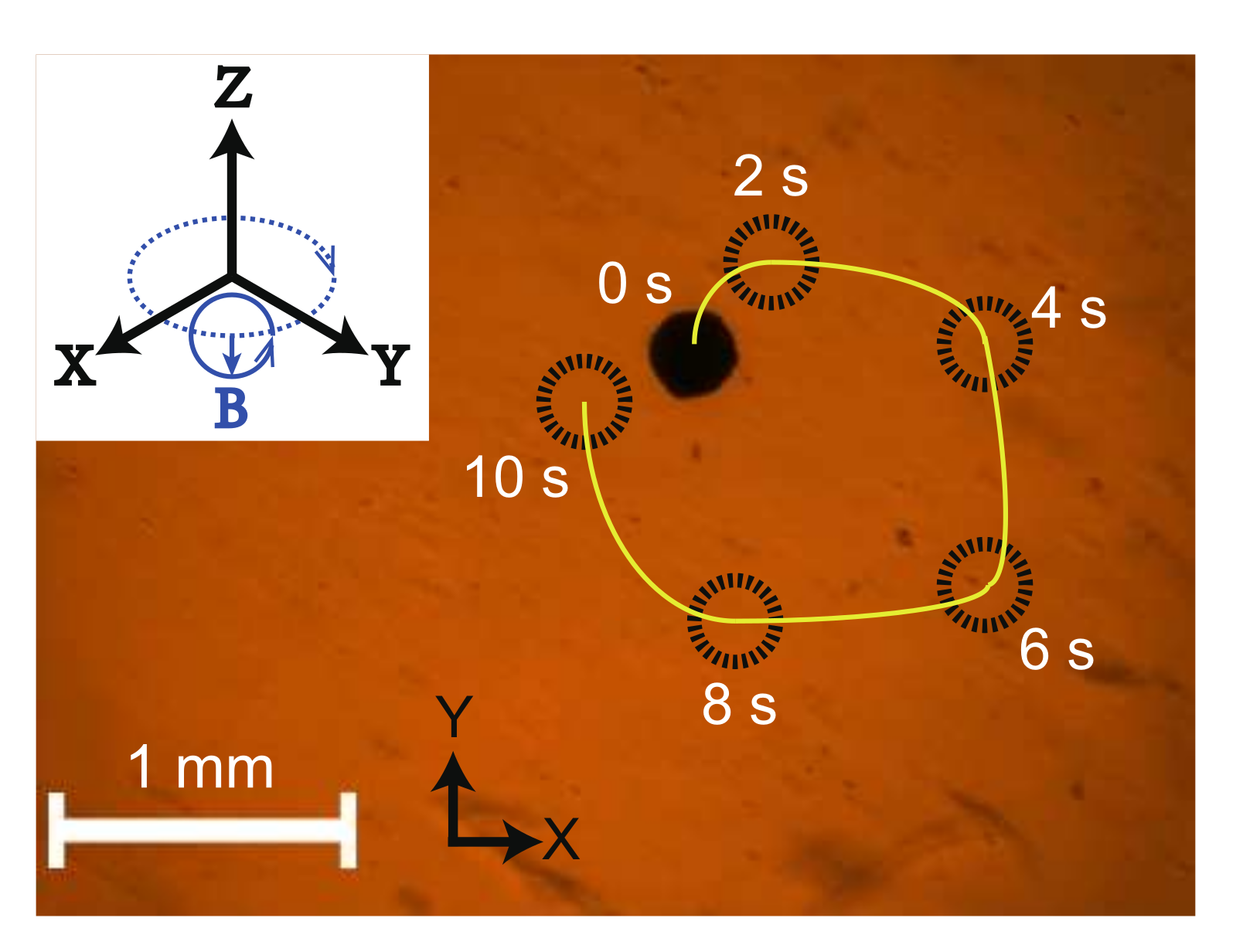
4.3. Performance Test of the Field Generation
4.4. Discussion on the System Performance
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for minimally invasive medicine. Ann. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carlsen, R.W.; Sitti, M. Bio-hybrid cell-based actuators for microsystems. Small 2014, 10, 3831–3851. [Google Scholar] [CrossRef]
- Diekmann, R.; Wolfson, D.L.; Spahn, C.; Heilemann, M.; Schüttpelz, M.; Huser, T. Nanoscopy of bacterial cells immobilized by holographic optical tweezers. Nat. Commun. 2016, 7, 13711. [Google Scholar] [CrossRef] [Green Version]
- Donald, B.R.; Levey, C.G.; McGray, C.D.; Paprotny, I.; Rus, D. An untethered, electrostatic, globally controllable MEMS micro-robot. J. Microelectromech. Syst. 2006, 15, 1–15. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, K.; Liu, W.; Yang, D.; Shen, H.; Peng, H.; Guo, X.; Li, J.; Wang, J. A human microrobot interface based on acoustic manipulation. ACS Nano 2019, 13, 11443–11452. [Google Scholar] [CrossRef] [PubMed]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B.J. How should microrobots swim? Int. J. Robot. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Law, J.; Luo, M.; Gong, Z.; Yu, J.; Tang, W.; Zhang, Z.; Mei, X.; Huang, Z.; You, L.; et al. Magnetic measurement and stimulation of cellular and intracellular structures. ACS Nano 2020, 14, 3805–3821. [Google Scholar] [CrossRef]
- Bozuyuk, U.; Suadiye, E.; Aghakhani, A.; Dogan, N.O.; Lazovic, J.; Tiryaki, M.E.; Schneider, M.; Karacakol, A.C.; Demir, S.O.; Richter, G.; et al. High-Performance Magnetic FePt (L10) Surface Microrollers Towards Medical Imaging-Guided Endovascular Delivery Applications. Adv. Funct. Mater. 2021, 32, 2109741. [Google Scholar] [CrossRef]
- Wang, L.; Dkhil, M.; Bolopion, A.; Rougeot, P.; Régnier, S.; Gauthier, M. Simulation and experiments on magnetic microforces for magnetic microrobots applications. In Proceedings of the 2013 International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale, Suzhou, China, 26–30 August 2013; pp. 15–20. [Google Scholar]
- Meng, Y.; Yan, G.; Jiang, P.; Zhao, K.; Wang, W.; Chen, F.; Zhuang, H. A novel wireless power transfer system with two parallel opposed coils for gastrointestinal capsule robot. Sens. Actuators A Phys. 2021, 321, 112413. [Google Scholar] [CrossRef]
- Wang, X.; Ho, C.; Tsatskis, Y.; Law, J.; Zhang, Z.; Zhu, M.; Dai, C.; Wang, F.; Tan, M.; Hopyan, S.; et al. Intracellular manipulation and measurement with multipole magnetic tweezers. Sci. Robot. 2019, 4, eaav6180. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Yamanishi, Y.; Masuda, T.; Feng, L.; Arai, F. On-chip magnetically actuated robot with ultrasonic vibration for single cell manipulations. Lab Chip 2011, 11, 2049–2054. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Sitti, M. Independent control of multiple magnetic microrobots in three dimensions. Int. J. Robot. Res. 2013, 32, 614–631. [Google Scholar] [CrossRef]
- Schuerle, S.; Erni, S.; Flink, M.; Kratochvil, B.E.; Nelson, B.J. Three-dimensional magnetic manipulation of micro-and nanostructures for applications in life sciences. IEEE Trans. Magn. 2012, 49, 321–330. [Google Scholar] [CrossRef]
- Zhang, Z.; Menq, C.H. Design and Modeling of a 3-D Magnetic Actuator for Magnetic Microbead Manipulation. IEEE/ASME Trans. Mechatron. 2011, 16, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Régnier, S.; Sitti, M. Rotating magnetic miniature swimming robots with multiple flexible flagella. IEEE Trans. Robot. 2013, 30, 3–13. [Google Scholar]
- Servant, A.; Qiu, F.; Mazza, M.; Kostarelos, K.; Nelson, B.J. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella. Adv. Mater. 2015, 27, 2981–2988. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.; Fan, X.; Sun, M.; Lin, Z.; He, Q.; Sun, L. Programmable Generation and Motion Control of a Snakelike Magnetic Microrobot Swarm. IEEE/ASME Trans. Mechatron. 2019, 24, 902–912. [Google Scholar] [CrossRef]
- Li, Y.; Xu, J.; Kang, X.; Fan, Z.; Dong, X.; Gao, X.; Zhuang, S. Design of highly uniform three-dimensional square magnetic field coils for external magnetic shielding of magnetometers. Sens. Actuators A Phys. 2021, 331, 113037. [Google Scholar] [CrossRef]
- Ongaro, F.; Pane, S.; Scheggi, S.; Misra, S. Design of an electromagnetic setup for independent three-dimensional control of pairs of identical and nonidentical microrobots. IEEE Trans. Robot. 2018, 35, 174–183. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Niu, F.; Li, J.; Li, X.; Sun, D. Gradient-enhanced electromagnetic actuation system with a new core shape design for microrobot manipulation. IEEE Trans. Ind. Electron. 2019, 67, 4700–4710. [Google Scholar] [CrossRef]
- Xing, L.; Liao, P.; Mo, H.; Li, D.; Sun, D. Preformation Characterization of a Torque-Driven Magnetic Microswimmer With Multi-Segment Structure. IEEE Access 2021, 9, 29279–29292. [Google Scholar] [CrossRef]
- Pourkand, A.; Abbott, J.J. A Critical Analysis of Eight-Electromagnet Manipulation Systems: The Role of Electromagnet Configuration on Strength, Isotropy, and Access. IEEE Robot. Autom. Lett. 2018, 3, 2957–2962. [Google Scholar] [CrossRef]
- Abbott, J.J. Parametric design of tri-axial nested Helmholtz coils. Rev. Sci. Instrum. 2015, 86, 054701. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wu, X.; Huang, C.; Manamanchaiyaporn, L.; Shang, W.; Yan, X.; Xu, T. 3-D Autonomous Manipulation System of Helical Microswimmers With Online Compensation Update. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1380–1391. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Zhang, L. Micromanipulation Using Reconfigurable Self-Assembled Magnetic Droplets With Needle Guidance. IEEE Trans. Autom. Sci. Eng. 2021, 1–13. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An electromagnetic system for 5-DOF wireless micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y.; Chi, Z.; Xu, Q. Design and Development of a New Rotating Electromagnetic Field Generation System for Driving Microrobots. IEEE Trans. Magn. 2022, 58, 1–8. [Google Scholar] [CrossRef]
- Alapan, Y.; Bozuyuk, U.; Erkoc, P.; Karacakol, A.C.; Sitti, M. Multifunctional surface microrollers for targeted cargo delivery in physiological blood flow. Sci. Robot. 2020, 5, eaba5726. [Google Scholar] [CrossRef] [PubMed]
- Bozuyuk, U.; Alapan, Y.; Aghakhani, A.; Yunusa, M.; Sitti, M. Shape anisotropy-governed locomotion of surface microrollers on vessel-like microtopographies against physiological flows. Proc. Natl. Acad. Sci. USA 2021, 118, e2022090118. [Google Scholar] [CrossRef] [PubMed]
- Goldman, A.J.; Cox, R.G.; Brenner, H. Slow viscous motion of a sphere parallel to a plane wall—Motion through a quiescent fluid. Chem. Eng. Sci. 1967, 22, 637–651. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. High-frequency and High-powered electromagnetic actuation system utilizing Two-stage resonant effects. IEEE/ASME Trans. Mechatron. 2020, 25, 2398–2408. [Google Scholar] [CrossRef]
- Nam, J.; Lee, W.; Jang, B.; Jang, G. Magnetic navigation system utilizing resonant effect to enhance magnetic field applied to magnetic robots. IEEE Trans. Ind. Electron. 2017, 64, 4701–4709. [Google Scholar] [CrossRef]
- Floyd, S.; Pawashe, C.; Sitti, M. An untethered magnetically actuated micro-robot capable of motion on arbitrary surfaces. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 419–424. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameters | |
|---|---|
| Constraint | 140 mm |
| Constraint | |
| Constraint | 40 mm |
| Constraint | |
| Constraint | |
| Constraint | 10 mm |
| Constraint | Input parameters |
| Output Parameters | |
| Objective | Minimize , high importance |
| Objective | Minimize , high importance |
| Objective | Maximize min(, ), medium importance |
| Objective | Minimize , low importance |
| Objective | Minimize , low importance |
| Objective | Maximize , low importance |
| Objective | Maximize , low importance |
| Constraint | min(, ) ≥ 20 mT |
| Constraint | 0.99 |
| Constraint | 0.99 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Input parameters | |||
| 120 | 8 | ||
| 15 mm | 45 mm | ||
| 35 mm | 0.6 mm | ||
| 70 | 5 | ||
| 44 mm | 0.6 mm | ||
| Output parameters | |||
| 20.8 mT | 5.2 mT | ||
| 4.0 A | 3.6 | ||
| 0.17 T/m | 0.997 | ||
| 132.6 mH | |||
| 23.6 mT | 5.9 mT | ||
| 4.0 A | 3.1 | ||
| 0.48 T/m | 0.998 | ||
| 5.5 mH | |||
| Performance | This Work | [33] | [34] | [28] | [35] |
|---|---|---|---|---|---|
| Hollow space | 7.54 × 10 mm | 1.73 × 10 mm | 3.04 × 10 mm | 4.09 × 10 mm | - |
| Maximum magnetic flux density at the center point | 22 mT | 37.4 mT | 14 mT | 20 mT | 6.5 mT |
| Maximum input current | 4.0 A | 15 A | 9.2 A | 20 A | 3 A |
| Resistance of one coil | 3.9 (x,y); | 6.7 (x); | 23.7 (x); | 1.3 | 10 |
| 3.2 (z) | 9.3 (y); | 15.1 (y); | |||
| 5.4 (z) | 32.2 (z) | ||||
| Number of electromagnetic coil () | 5 | 6 | 6 | 8 | 4 |
| Maximum total input power | 300.8 W | 9630 W | 12,018.9 W | 4160 W | 360 W |
| Figure of merit (FOM) | 5514.6 | 6718.8 | 3541.1 | 157.34 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Xu, Z.; Xu, Q. Design and Optimization of a New Alternating Electromagnetic-Field-Generation System for an Inverted Microscope. Micromachines 2022, 13, 542. https://doi.org/10.3390/mi13040542
Wu Z, Xu Z, Xu Q. Design and Optimization of a New Alternating Electromagnetic-Field-Generation System for an Inverted Microscope. Micromachines. 2022; 13(4):542. https://doi.org/10.3390/mi13040542
Chicago/Turabian StyleWu, Zehao, Ziheng Xu, and Qingsong Xu. 2022. "Design and Optimization of a New Alternating Electromagnetic-Field-Generation System for an Inverted Microscope" Micromachines 13, no. 4: 542. https://doi.org/10.3390/mi13040542