1. Introduction
There is an increasing demand in microfluidic flow control devices in a wide range of applications, including point-of-care [
1] and lab-on-a-chip industries [
2]. Although they are compact in size, microfluidic chips are equipped with bulky supply systems that are connected with microbore tubing to provide air pressure or reagent [
3,
4,
5,
6,
7]. Although such systems provide precision pumping capabilities, the increased complexity hinders their applications in specific industries such as the welfare industry, in which a portable, wearable, and patchable insulin delivery system could be utilized to enhance the well-being of type 1 diabetic patients.
There have been various micropump designs studied in the literature. The piezoelectric-, magnetic-, electrochemical-, acoustic-, and electrothermal-based micropump have their positive and negative sides over one another in terms of scalability, biocompatibility, complexity, and accuracy, cost, and reliability [
8]. For instance, lead zirconate titanate (PZT)-based micropumps offer a precise volumetric flow rate of aqueous fluids at fast response times and high actuation forces. However, they are complex to manufacture, require special care when installing their intricate components, such as the PZT discs, and demand high actuation voltages to operate. However, the electrochemical-based micropumps are relatively simpler to fabricate, offer continuous and smooth fluid delivery, can provide relatively larger displacements at lower power consumption, and can have battery-less versions when equipped with triboelectric nanogenerators. As for their drawbacks, they generate bubbles, which can subsequently dissolve into the working fluid, causing instabilities during pumping. Apart from these, various magnetic-based micropumps have been studied in the literature [
9,
10,
11,
12]. Some operate on the principle that an external magnetic field displaces a membrane mechanically to push the fluid forward. In contrast, others, such as magnetohydrodynamic (MHD) micropumps, rely on the Lorentz force under the combined effect of the electric and orthogonal magnetic fields to create the pumping effect.
Magnetic-based designs that rely on mechanical displacement of a membrane can be categorized into two groups: (i) designs wherein the membranes are pushed by a set of actuator heads to create a pressure differential, and (ii) designs that deform a ferromagnetic composite material, usually consisting of a polydimethylsiloxane (PDMS)-based matrix and micro- or nano-sized ferromagnetic iron particles embedded in them, under an externally applied magnetic field [
8]. Designs from the first category are complex and have excess moving components, which could become a concern for installation and maintenance. The second category of pumps is more design-dependent. Although some designs feature a ferromagnetic membrane that deflects into a disk-shaped reservoir to generate the pumping effect, others contract a circular or rectangular flow channel for a pulsated flow. Using a magnetic field as a trigger has several advantages over other modes of operation. Magnetic actuators can generate strong force and displacement with lower power consumption, and they are less prone to electrical heat loss and high-voltage failure. Moreover, the actuation parts and magnetic field-generating parts can be physically separated, so these systems do not require complex wiring. Magnetorheological elastomers (MREs) are composite materials consisting of a rubber-like base material and micron-sized iron particles doped in it [
13]. They can be designed as isotropic and non-isotropic, meaning that the magnetic iron particles inside them can be aligned in special configurations so the material responds to the applied loads differently. As such, these materials have found very wide application areas, ranging from vibration mounts in automobile engines to bearings in large building structures and bridges as well as sensor applications for structural health monitoring purposes, among other areas. Their application in the micropump field has not been overlooked. Various MRE micropump designs have been proposed in the literature [
14,
15,
16,
17,
18,
19,
20,
21,
22,
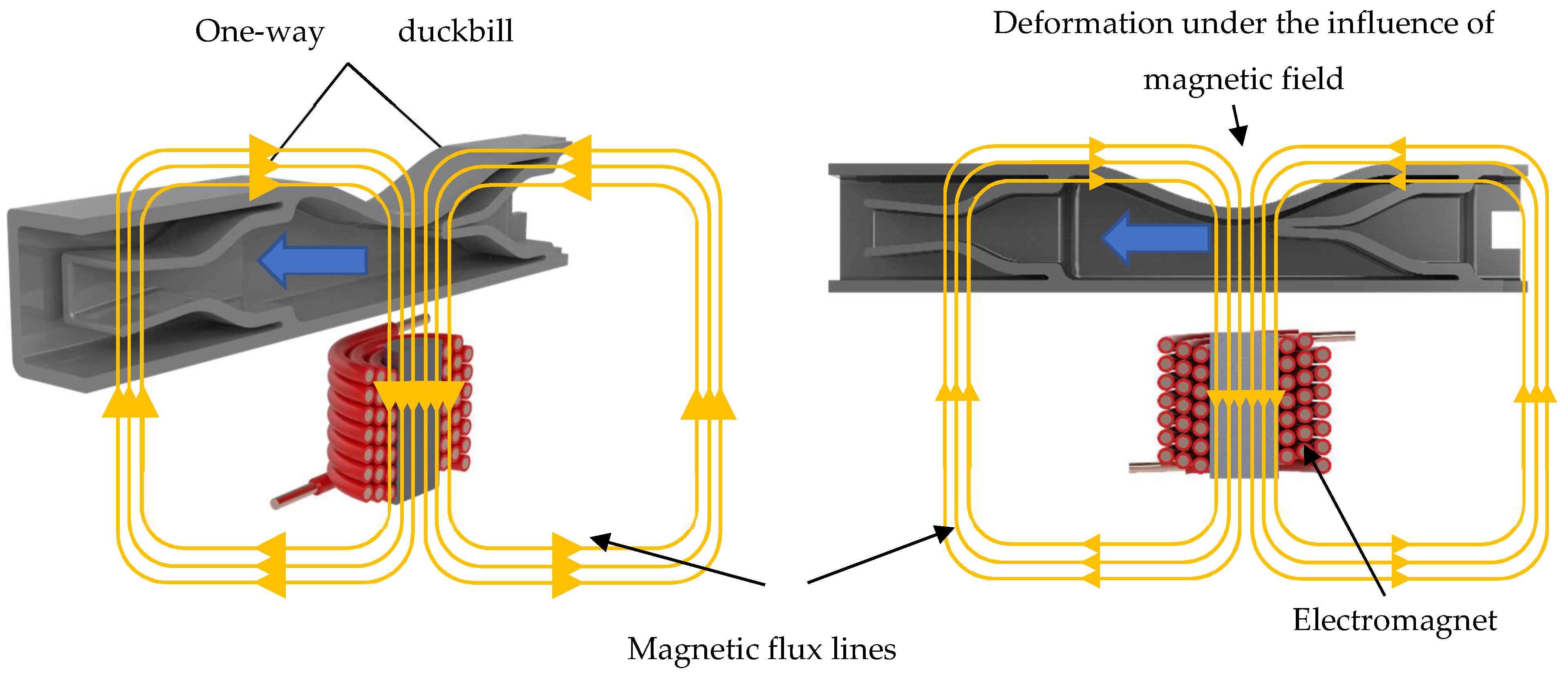
23]. Although some featured one-way valves for unidirectional pumping effect [
22], others used a series of electromagnets to transport the fluid through the pump channel [
24,
25,
26]. Behrooz and Gordaninejad applied a soft MRE membrane for conveying Newtonian fluid to understand the microfluid transportation system, and they also demonstrated the performance is significantly affected by the design parameters [
27,
28]. Stork was the first to investigate the influence of electromagnets on fluid transport and an MRE peristaltic pump to convey fluid [
29]. Ehsani and Nejat proposed a simple conceptual design of a flexible-valve micropump based on using magneto-fluid-structural interaction (MFSI) three physics simulations [
30]. Xufeng et al. proposed using an MRE-based magneto-active pulse pump in 3D, but they did the numerical analysis without using valves inside the microchannel [
31]. These existing micropump designs have their own limitations and/or drawbacks. For instance, the initial concept proposed by Behrooz and Gordaninejad provides lower pumping capacity. The micropump design proposed by Ehsani and Nejat operates with a relatively slower response time under the magnetic field and also provides a weaker actuation force. Moreover, their design suffers from large backflow issues due to the larger gap between the tip of the valves and the upper wall. The design proposed by Xufeng et al. experiences slower response time and lower pumping capacity as well. Therefore, there is still room for novel pump magnetorheological pump designs that could potentially operate with faster response times, minimize the backflow, and provide higher pumping capacities.
It is a common agreement that fabrication of such designs prove to be challenging at microscale. However, with the recent advancements in 3D-printing technology, manufacturing possibilities of such designs are revisited. As such, fabrication aspects should be taken into consideration during the design stage.
In the light of above discussions,
we propose a novel magnetorheological peristaltic micropump that has not been studied previously to offer an efficient, miniature (on the order of 1 mm), lightweight, portable, wirelessly controllable (with a fast response time of less than 100 ms), durable, low-power micropump for drug delivery; and we believe that
originality of the study stems from the fact that the proposed design is not only novel but is also designed to be fabricated by 3D-printing technologies in a more convenient way than the existing MRE micropumps in the literature.
The details of the design will be discussed in
Section 2. A multiphysics-based simulation approach was adopted to prove the proposed concept. Highly coupled magneto-solid-fluid interaction simulations were carried out in COMSOL Multiphysics software (v5.6). To investigate the effects of significant design parameters, a parametric analysis was also conducted. The paper is organized as follows: the proposed design is discussed in
Section 2, simulation methodology is presented in
Section 3, parametric and optimization studies are covered in
Section 4, and summary and conclusions are discussed in
Section 5.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





