
Robust Walking for Humanoid Robot Based on Divergent Component of Motion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
3. Gait Planning for Humanoids
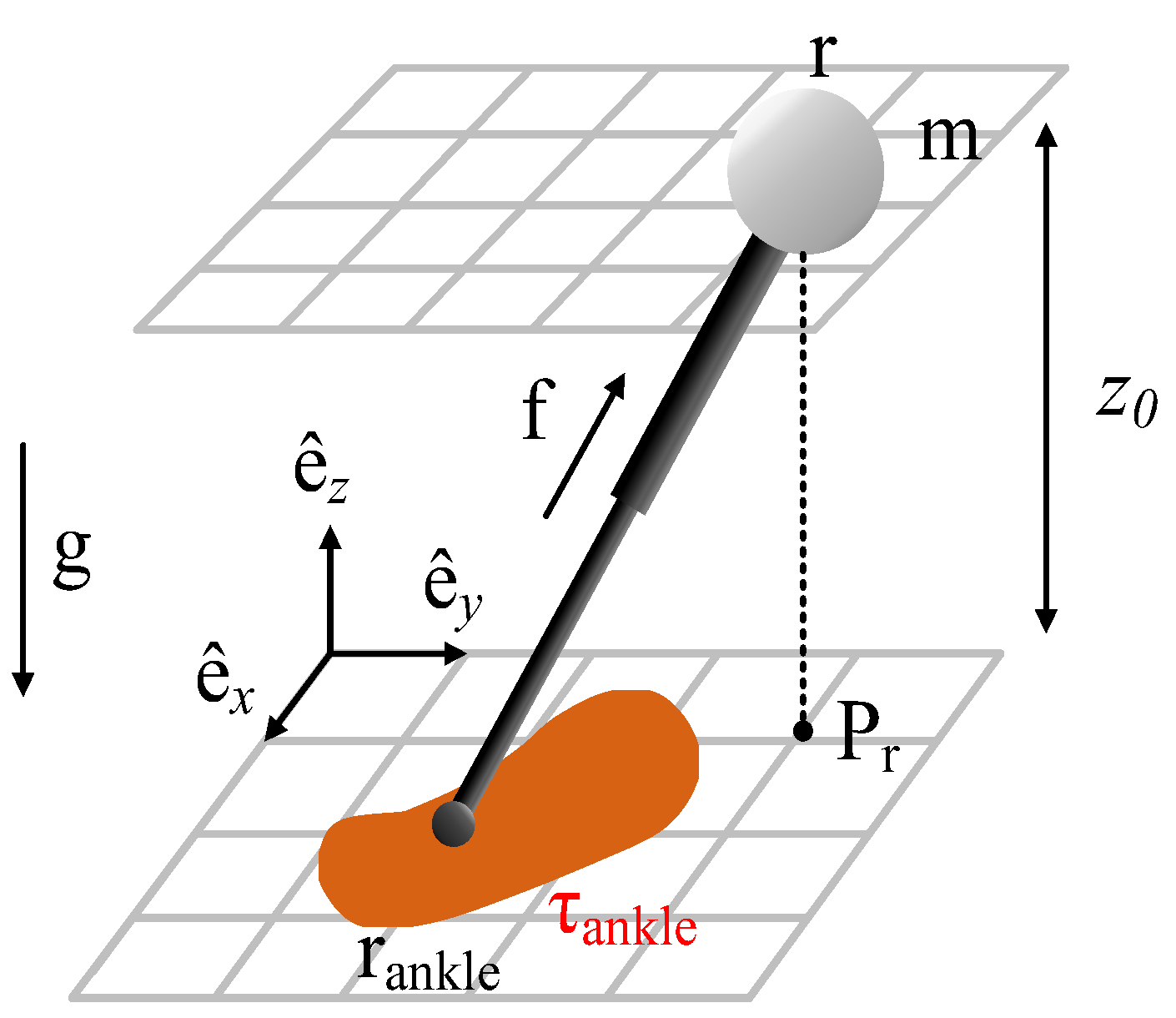
3.1. LIPM with Finite-Sized Feet
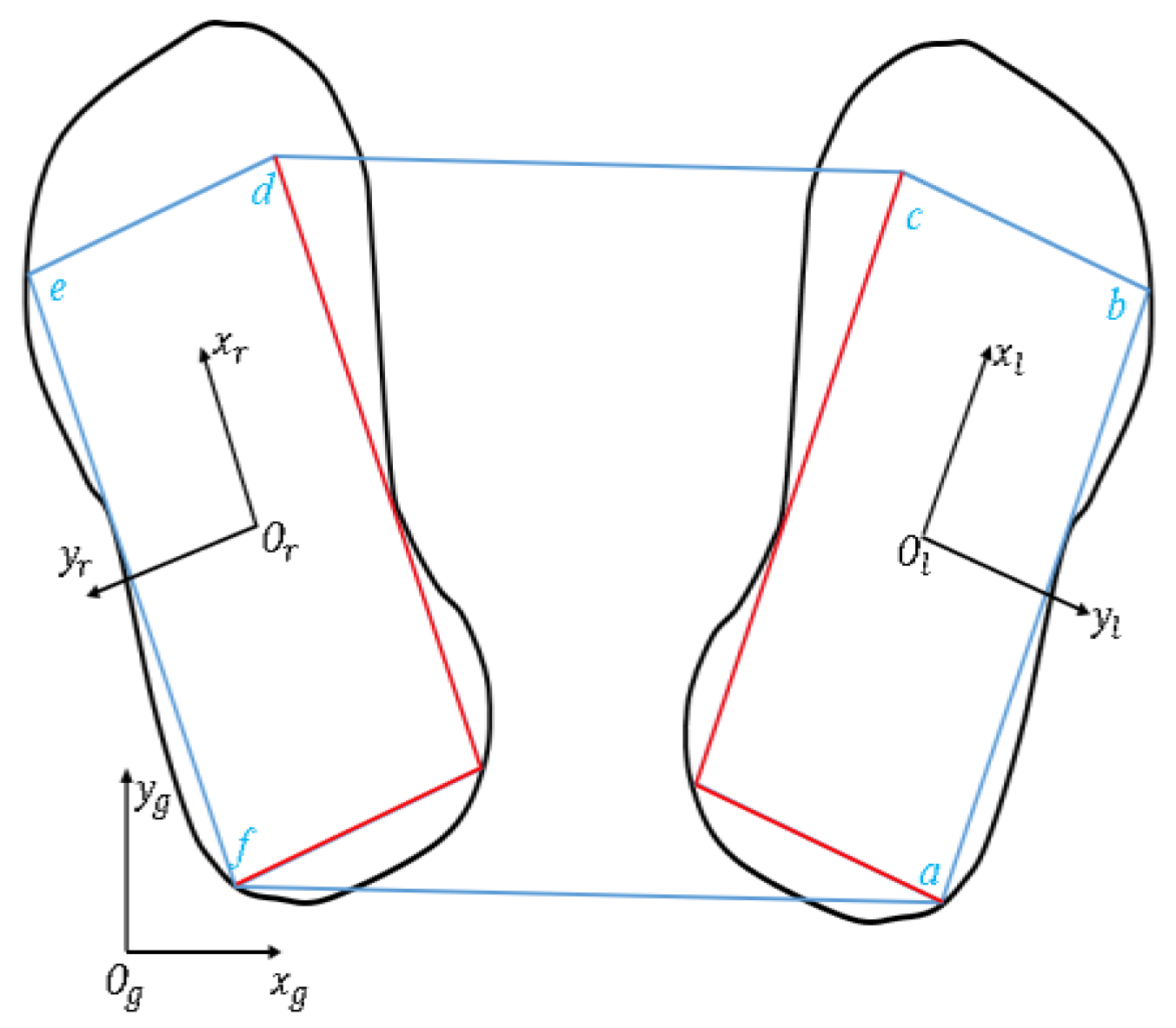
3.2. Single-Support Phase
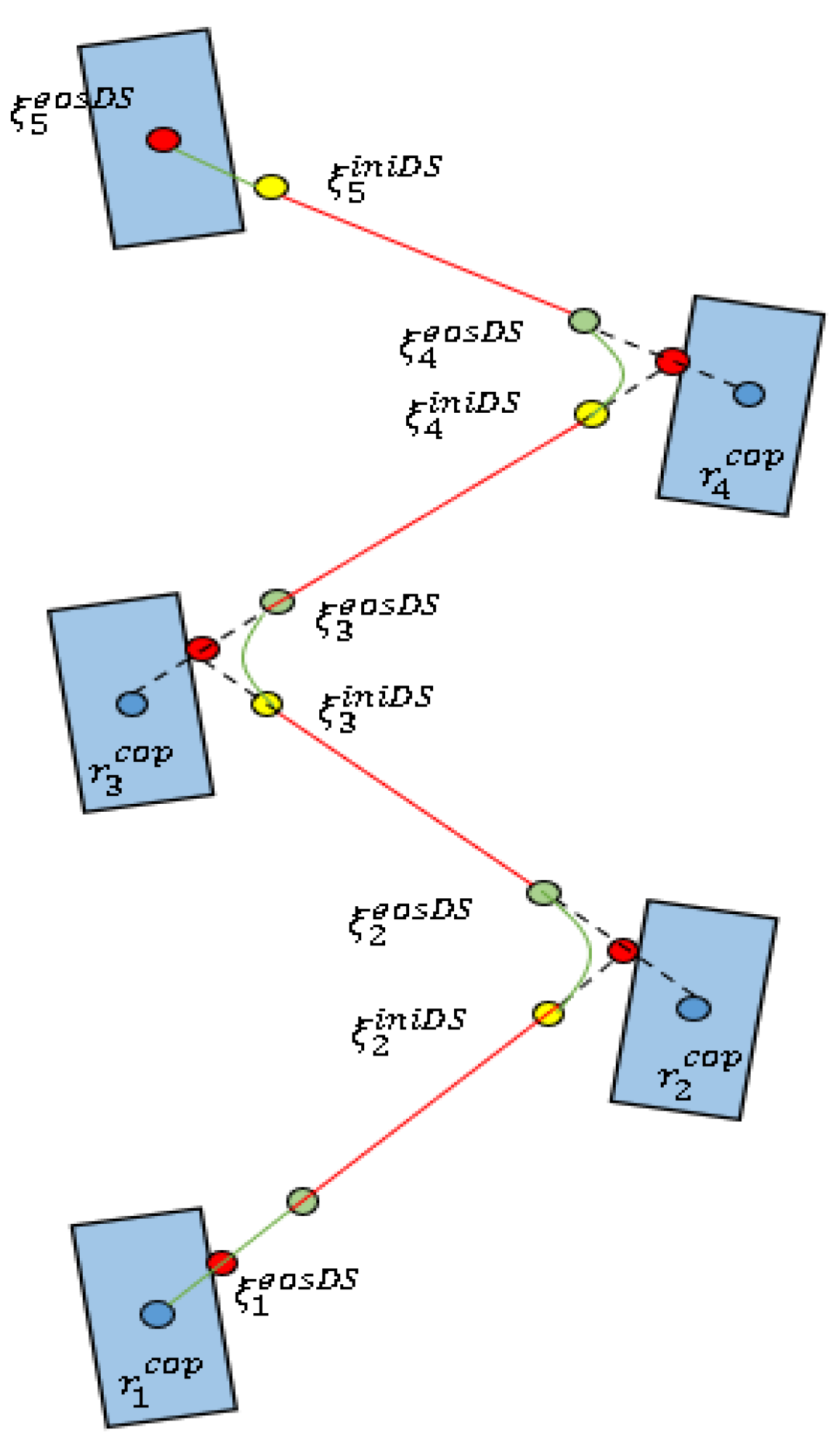
3.3. Double-Support Phase
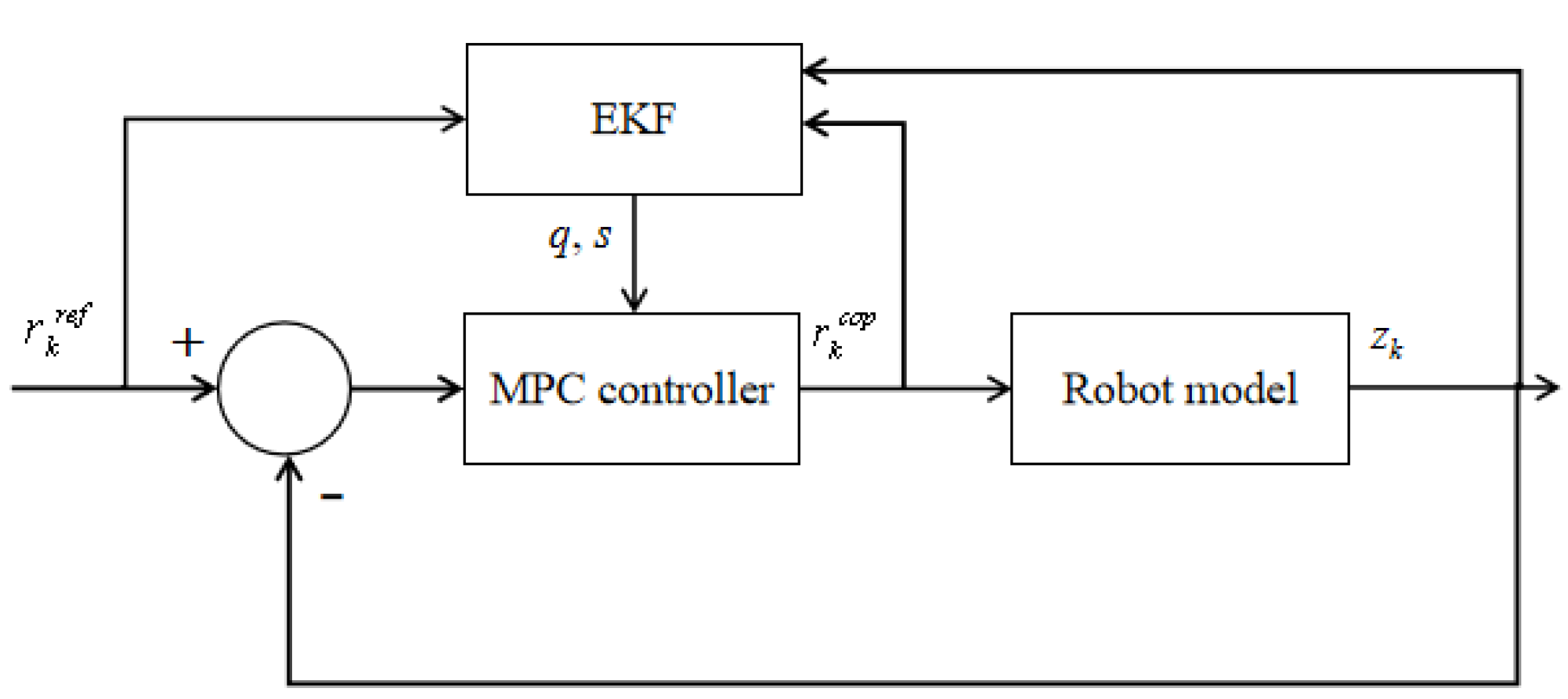
4. Model Predictive Controller
4.1. Predictive Model
4.2. Constraints of Model Predictive Control
4.3. Cost Function
4.4. Extended Kalman Filter
5. Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Graefe, V.; Bischoff, R. From ancient machines to intelligent robots—A technical evolution. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 3-418–3-431. [Google Scholar] [CrossRef]
- Huang, Q.; Dong, C.; Yu, Z.; Chen, X.; Li, Q.; Chen, H.; Liu, H. Resistant Compliance Control for Biped Robot Inspired by Humanlike Behavior. IEEE/ASME Trans. Mechatron. 2022, 1–11. [Google Scholar] [CrossRef]
- Vukobratovićn, M.; Stepanenko, J. On the stability of anthropomorphic systems. Math Biosci. 1972, 15, 1–37. [Google Scholar] [CrossRef]
- Guan, K.; Yamamoto, K.; Nakamura, Y. Push Recovery by Angular Momentum Control during 3D Bipedal Walking based on Virtual-mass-ellipsoid Inverted Pendulum Model. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, Canada, 15–17 October 2019; pp. 120–125. [Google Scholar] [CrossRef]
- Baskoro, A.S.; Priyono, M.G. Design of humanoid robot stable walking using inverse kinematics and zero moment point. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016; pp. 335–339. [Google Scholar] [CrossRef]
- Mesesan, G.; Englsberger, J.; Ott, C.; Albu-Schäffer, A. Convex Properties of Center-of-Mass Trajectories for Locomotion Based on Divergent Component of Motion. IEEE Robot. Autom. Lett. 2018, 3, 3449–3456. [Google Scholar] [CrossRef] [Green Version]
- Xie, S.; Li, X.; Zhong, H.; Hu, C.; Gao, L. Compliant Bipedal Walking Based on Variable Spring-Loaded Inverted Pendulum Model with Finite-sized Foot. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 667–672. [Google Scholar] [CrossRef]
- Goswami, A. Foot rotation indicator (FRI) point: A new gait planning tool to evaluate postural stability of biped robots. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 47–52. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, C.; Castano, J.; Wang, X.; Negrello, F.; Tsagarakis, N.G.; Caldwell, D.G. Fall Prediction of legged robots based on energy state and its implication of balance augmentation: A study on the humanoid. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5094–5100. [Google Scholar] [CrossRef]
- Chevallereau, C.; Djoudi, D.; Grizzle, J.W. Stable Bipedal Walking with Foot Rotation Through Direct Regulation of the Zero Moment Point. IEEE Trans. Robot. 2008, 24, 390–401. [Google Scholar] [CrossRef] [Green Version]
- Ono, H.; Sato, T.; Ohnishi, K. Falling risk evaluation based on plantar contact points for biped robot. In Proceedings of the 2012 12th IEEE International Workshop on Advanced Motion Control (AMC), Sarajevo, Bosnia and Herzegovina, 25–27 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, Q.; Yokoi, K.; Kajita, S.; Kaneko, K.; Arai, H.; Koyachi, N.; Tanie, K. Planning walking patterns for a biped robot. IEEE Trans. Robot. Autom. 2001, 17, 280–289. [Google Scholar] [CrossRef] [Green Version]
- Sorao, K.; Murakami, T.; Ohnishi, K. A unified approach to ZMP and gravity center control in biped dynamic stable walking. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Tokyo, Japan, 20 June 1997; p. 112. [Google Scholar] [CrossRef]
- Zhang, R.; Zhao, M.; Wang, C.-L. Standing Push Recovery Based on LIPM Dynamics Control for Biped Humanoid Robot. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1732–1737. [Google Scholar] [CrossRef]
- Kim, J.; Park, B.; Lee, H.; Park, J. Hybrid Position/Torque Ankle Controller for Minimizing ZMP error of Humanoid Robot. In Proceedings of the 2021 18th International Conference on Ubiquitous Robots (UR), Gangwon-do, Korea, 12–14 July 2021; pp. 211–216. [Google Scholar] [CrossRef]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Yokoi, K.; Hirukawa, H. The 3D linear inverted pendulum mode: A simple modeling for a biped walking pattern generation. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 1, pp. 239–246. [Google Scholar] [CrossRef]
- Kajita, S.; Morisawa, M.; Miura, K.; Nakaoka, S.I.; Harada, K.; Kaneko, K.; Kanehiro, F.; Yokoi, K. Biped walking stabilization based on linear inverted pendulum tracking. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4489–4496. [Google Scholar] [CrossRef]
- Wieber, P. Trajectory Free Linear Model Predictive Control for Stable Walking in the Presence of Strong Perturbations. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 137–142. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Zhou, Q.; Chen, X.; Li, Q.; Meng, L.; Zhang, W.; Huang, Q. Disturbance Rejection for Biped Walking Using Zero-Moment Point Variation Based on Body Acceleration. IEEE Trans. Ind. Inform. 2019, 15, 2265–2276. [Google Scholar] [CrossRef]
- Yoo, S.M.; Hwang, S.W.; Kim, D.H.; Park, J.H. Biped Robot Walking on Uneven Terrain Using Impedance Control and Terrain Recognition Algorithm. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 293–298. [Google Scholar] [CrossRef]
- Yamamoto, K.; Kamioka, T.; Sugihara, T. Survey on model-based biped motion control for humanoid robots. Adv. Robot. 2020, 34, 1353–1369. [Google Scholar] [CrossRef]
- Herzog, A.; Rotella, N.; Schaal, S.; Righetti, L. Trajectory generation for multi-contact momentum control. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 874–880. [Google Scholar] [CrossRef] [Green Version]
- van Heerden, K. Real-Time Variable Center of Mass Height Trajectory Planning for Humanoids Robots. IEEE Robot. Autom. Lett. 2017, 2, 135–142. [Google Scholar] [CrossRef]
- Caron, S.; Escande, A.; Lanari, L.; Mallein, B. Capturability-Based Pattern Generation for Walking with Variable Height. IEEE Trans. Robot. 2020, 36, 517–536. [Google Scholar] [CrossRef] [Green Version]
- Kamioka, T.; Kaneko, H.; Takenaka, T.; Yoshiike, T. Simultaneous Optimization of ZMP and Footsteps Based on the Analytical Solution of Divergent Component of Motion. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1763–1770. [Google Scholar] [CrossRef]
- Kasaei, M.M.; Lau, N.; Pereira, A. A Model-Based Biped Walking Controller Based on Divergent Component of Motion. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Gondomar, Portugal, 24–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Tian, Z.; Hu, W.; Zhao, M. Human-Like ZMP Generator and Walking Stabilizer Based on Divergent Component of Motion. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Pratt, J.; Carff, J.; Drakunov, S.; Goswami, A. Capture Point: A Step toward Humanoid Push Recovery. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 200–207. [Google Scholar] [CrossRef] [Green Version]
- Hof, A.L. The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking. Hum. Mov. Sci. 2008, 27, 112–125. [Google Scholar] [CrossRef] [PubMed]
- Takenaka, T.; Matsumoto, T.; Yoshiike, T. Real time motion generation and control for biped robot—1st report: Walking gait pattern generation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 December 2009; pp. 1084–1091. [Google Scholar] [CrossRef]
- Englsberger, J.; Ott, C.; Roa, M.A.; Albu-Schäffer, A.; Hirzinger, G. Bipedal walking control based on Capture Point dynamics. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4420–4427. [Google Scholar] [CrossRef]
- Englsberger, J.; Ott, C. Integration of vertical COM motion and angular momentum in an extended Capture Point tracking controller for bipedal walking. In Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November–1 December 2012; pp. 183–189. [Google Scholar] [CrossRef] [Green Version]
- Seyde, T.; Shrivastava, A.; Englsberger, J.; Bertrand, S.; Pratt, J.; Griffin, R.J. Inclusion of Angular Momentum During Planning for Capture Point Based Walking. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1791–1798. [Google Scholar] [CrossRef]
- Aghbali, B.; Yousefi-Koma, A.; Toudeshki, A.G.; Shahrokhshahi, A. ZMP trajectory control of a humanoid robot using different controllers based on an offline trajectory generation. In Proceedings of the 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 13–15 February 2013; pp. 530–534. [Google Scholar] [CrossRef]
- Smaldone, F.M.; Scianca, N.; Modugno, V.; Lanari, L.; Oriolo, G. ZMP Constraint Restriction for Robust Gait Generation in Humanoids. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8739–8745. [Google Scholar] [CrossRef]
- García, G.; Griffin, R.; Pratt, J. MPC-based Locomotion Control of Bipedal Robots with Line-Feet Contact using Centroidal Dynamics. In Proceedings of the 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), Munich, Germany, 20–21 July 2021; pp. 276–282. [Google Scholar] [CrossRef]
- Gazar, A.; Khadiv, M.; Prete, A.D.; Righetti, L. Stochastic and Robust MPC for Bipedal Locomotion: A Comparative Study on Robustness and Performance. In Proceedings of the 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), Munich, Germany, 20–21 July 2021; pp. 61–68. [Google Scholar] [CrossRef]
- Silva, C.C.D.; Maximo, M.R.O.A.; Góes, L.C.S. Height Varying Humanoid Robot Walking through Model Predictive Control. In Proceedings of the 2019 Latin American Robotics Symposium (LARS), 2019 Brazilian Symposium on Robotics (SBR) and 2019 Workshop on Robotics in Education (WRE), Rio Grande, Brazil, 23–25 October 2019; pp. 49–54. [Google Scholar] [CrossRef]
- Krause, M.; Englsberger, J.; Wieber, P.-B.; Ott, C. Stabilization of the capture point dynamics for bipedal walking based on model predictive control. IFAC Proc. Vol. 2012, 45, 165–171. [Google Scholar] [CrossRef] [Green Version]
- Griffin, R.J.; Leonessa, A. Model predictive control for dynamic footstep adjustment using the divergent component of motion. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1763–1768. [Google Scholar] [CrossRef]
- Shafiee-Ashtiani, M.; Yousefi-Koma, A.; Shariat-Panahi, M. Robust bipedal locomotion control based on model predictive control and divergent component of motion. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29–31 May 2017; pp. 3505–3510. [Google Scholar] [CrossRef] [Green Version]
- Kasaei, M.; Lau, N.; Pereira, A. A Robust Biped Locomotion Based on Linear-Quadratic-Gaussian Controller and Divergent Component of Motion. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1429–1434. [Google Scholar] [CrossRef] [Green Version]
- Dabbagh, J.; Altas, I.H. Nonlinear Two-Wheeled Self-Balancing Robot Control Using LQR and LQG Controllers. In Proceedings of the 2019 11th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 28–30 November 2019; pp. 855–859. [Google Scholar] [CrossRef]
- Yang, S.; Baum, M. Extended Kalman filter for extended object tracking. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4386–4390. [Google Scholar] [CrossRef]
- Ohung, K.; Jong, H.P. Gait transitions for walking and running of biped robots. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1350–1355. [Google Scholar] [CrossRef]
- Rajendra, R.; Pratihar, D.K. Analysis of double support phase of biped robot and multi-objective optimization using genetic algorithm and particle swarm optimization algorithm. Sadhana 2015, 40, 549–575. [Google Scholar] [CrossRef]
- Qinghua, L.; Takanishi, A.; Kato, I. A biped walking robot having a ZMP measurement system using universal force-moment sensors. In Proceedings of the IROS ‘91: IEEE/RSJ International Workshop on Intelligent Robots and Systems ‘91, Osaka, Japan, 3–5 November 1991; Volume 3, pp. 1568–1573. [Google Scholar] [CrossRef]
- Shih, C.; Zhu, Y.; Gruver, W.A. Optimization of the biped robot trajectory. In Proceedings of the 1991 IEEE International Conference on Systems, Man, and Cybernetics, Charlottesville, VA, USA, 13–16 October 1991; Volume 2, pp. 899–903. [Google Scholar] [CrossRef]
- Shibuya, M.; Suzuki, T.; Ohnishi, K. Trajectory Planning of Biped Robot Using Linear Pendulum Mode for Double Support Phase. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 4094–4099. [Google Scholar] [CrossRef]
- Shih, C.-L.; Grizzle, J.W.; Chevallereau, C. Asymptotically Stable Walking of a Simple Underactuated 3D Bipedal Robot. In Proceedings of the IECON 2007—33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 2766–2771. [Google Scholar] [CrossRef] [Green Version]
- Koolen, T.; de Boer, T.; Rebula, J.; Goswami, A.; Pratt, J. Capturability-based analysis and control of legged locomotion, Part 1: Theory and application to three simple gait models. Int. J. Robot. Res. 2012, 31, 1094–1113. [Google Scholar] [CrossRef]
- Huang, Q.; Kajita, S.; Koyachi, N.; Kaneko, K.; Yokoi, K.; Arai, H.; Komoriya, K.; Tanie, K. A high stability, smooth walking pattern for a biped robot. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 65–71. [Google Scholar] [CrossRef]
- Ciocca, M.; Wieber, P.; Fraichard, T. Effect of Planning Period on MPC-based Navigation for a Biped Robot in a Crowd. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 491–496. [Google Scholar] [CrossRef] [Green Version]
- Tsoeu, M.S.; Esmail, M. Unconstrained MPC and PID evaluation for motion profile tracking applications. In Proceedings of the IEEE Africon ‘11, Livingstone, Zambia, 13–15 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Castano, J.A.; Zhou, C.; Kryczka, P.; Tsagarakis, N. MPC strategy for dynamic stabilization of preplanned walking gaits. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 618–623. [Google Scholar] [CrossRef]
- Madhukar, P.S.; Prasad, L.B. State Estimation using Extended Kalman Filter and Unscented Kalman Filter. In Proceedings of the 2020 International Conference on Emerging Trends in Communication, Control and Computing (ICONC3), Rajasthan, India, 21–22 February 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Mochnac, J.; Marchevsky, S.; Kocan, P. Bayesian filtering techniques: Kalman and extended Kalman filter basics. In Proceedings of the 2009 19th International Conference Radioelektronika, Bratislava, Slovakia, 22–23 April 2009; pp. 119–122. [Google Scholar] [CrossRef]
- Yan, C.; Dong, J.; Lu, G.; Zhang, D.; Qi, Y. An adaptive algorithm based on levenberg-marquardt method and two-factor for iterative extended Kalman filter. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 1559–1563. [Google Scholar] [CrossRef]
- Ruan, X.-G.; Ke-ke, S. An adaptive extended Kalman filter for attitude estimation of Self-Balancing Two-Wheeled Robot. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Yichang, China, 16–18 September 2011; pp. 4760–4763. [Google Scholar] [CrossRef]
- Bishop, G.; Welch, G. An introduction to the Kalman filter. In Proceedings of the of SIGGRAPH, Course, Los Angeles, CA, USA, 12–17 August 2001; Volume 8. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhang, L.; Xin, S.; Xiao, N.; Wen, X. Robust Walking for Humanoid Robot Based on Divergent Component of Motion. Micromachines 2022, 13, 1095. https://doi.org/10.3390/mi13071095
Zhang Z, Zhang L, Xin S, Xiao N, Wen X. Robust Walking for Humanoid Robot Based on Divergent Component of Motion. Micromachines. 2022; 13(7):1095. https://doi.org/10.3390/mi13071095
Chicago/Turabian StyleZhang, Zhao, Lei Zhang, Shan Xin, Ning Xiao, and Xiaoyan Wen. 2022. "Robust Walking for Humanoid Robot Based on Divergent Component of Motion" Micromachines 13, no. 7: 1095. https://doi.org/10.3390/mi13071095
APA StyleZhang, Z., Zhang, L., Xin, S., Xiao, N., & Wen, X. (2022). Robust Walking for Humanoid Robot Based on Divergent Component of Motion. Micromachines, 13(7), 1095. https://doi.org/10.3390/mi13071095