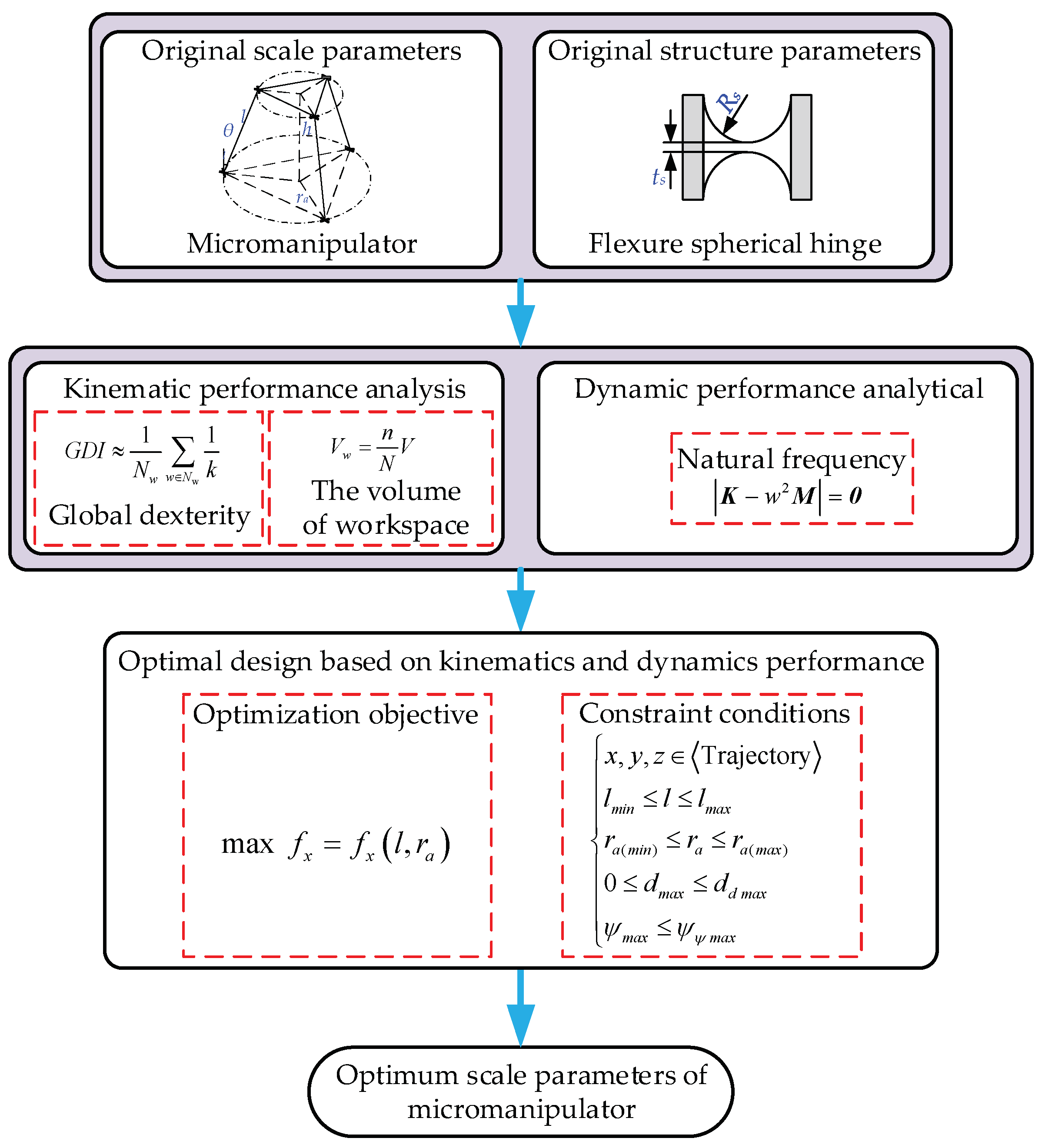
3.1. The Scale Parameters Optimization Based on Kinematic Performance
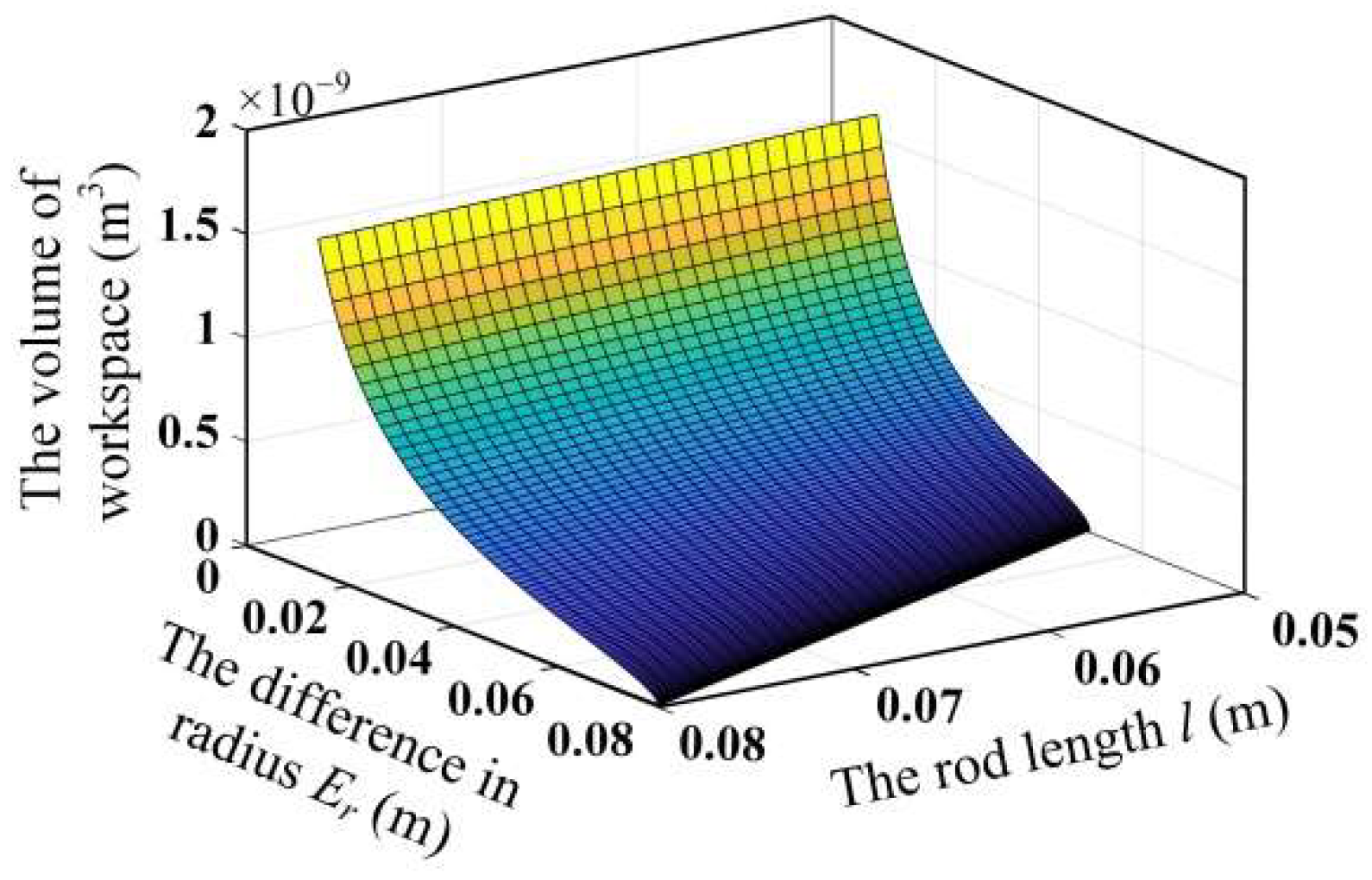
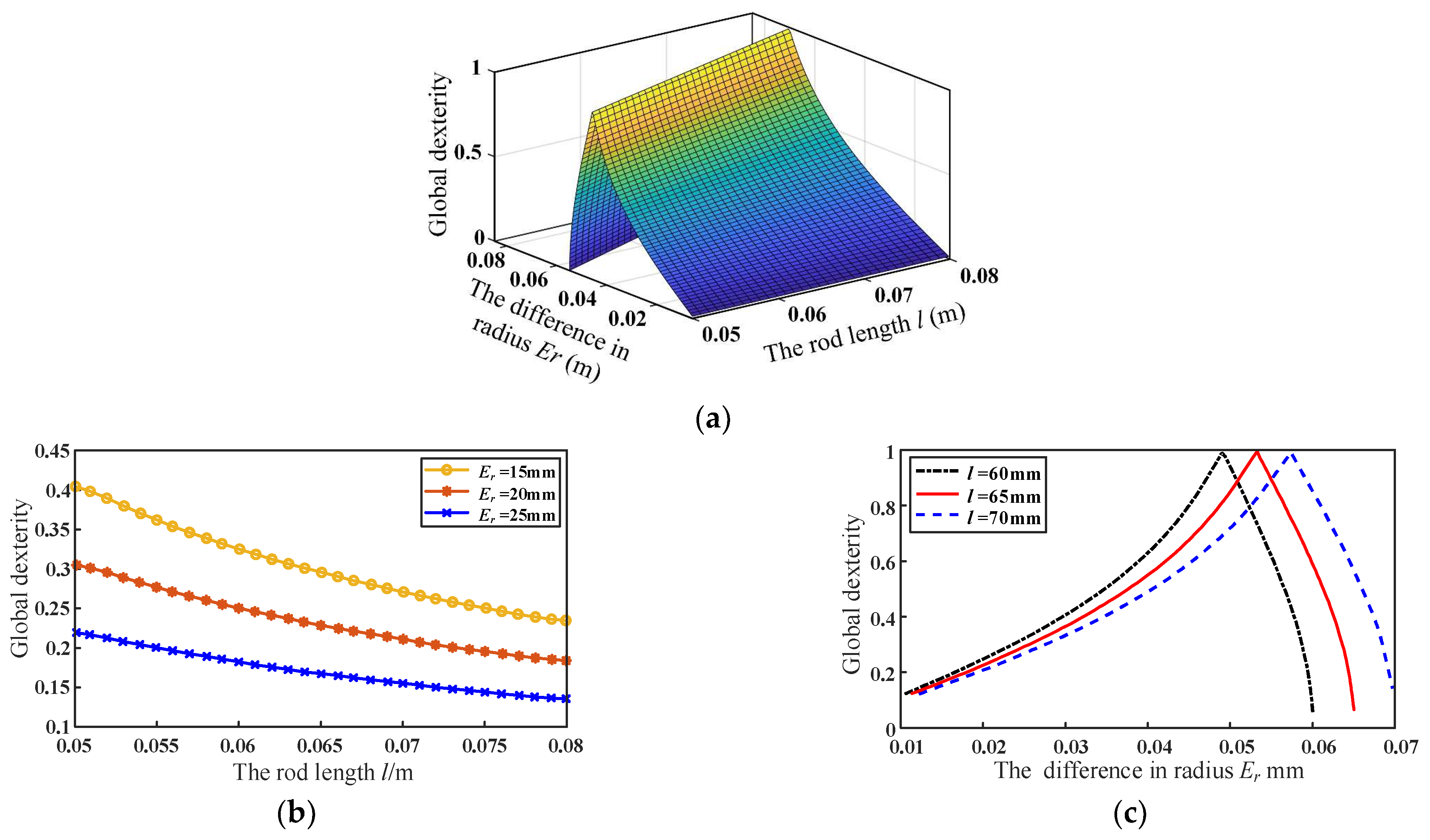
It can be known from the kinematic Equation (2) that the kinematic performance is mainly related to the rod length l and the difference between the moving and fixed platform radius Er. In order to simplify the analysis, the radius of the moving platform of the mechanism is assumed to be a constant, and the fixed platform radius ra and the rod length l are used as the optimization parameters.
For the convenience of optimization, the variation range of the rod length
l is given as approximately ±20% of the original size. The corresponding variation range of the radius
ra of the fixed platform can be obtained through the variation range of the rod length
l and the geometry relationship of the mechanism. It is assumed that the stroke
dmax of the selected piezoelectric stages is 200 μm, and the ultimate angular displacement
of the flexure spherical hinge is 1°. When designing a flexible parallel mechanism, higher motion accuracy and a larger workspace are usually expected, but the two are contradictory. Since the motion accuracy is related to global dexterity, we take the minimum global dexterity (assumed to be 0.2 in this study) as one of the constraints, the minimum ratio of the mechanism’s volume to the workspace volume as the objective function, and then combine the constraints of the scale parameters (
l and
ra) to formulate the following optimization model.
where
Vw represents the volume of the workspace of the micromanipulator and
V represents the volume of the workspace of a cube covering the entire workspace of micromanipulator.
According to the above constraints and optimization objective, optimization is carried out by employing the genetic algorithm toolbox in MATLAB R2018b software (MathWorks, Natick, MA, USA). The optimized scale parameters are ra = 38.66 mm and l = 50.13 mm, respectively. The global dexterity GDI of the optimized mechanism is 0.204, which meets the design requirements.
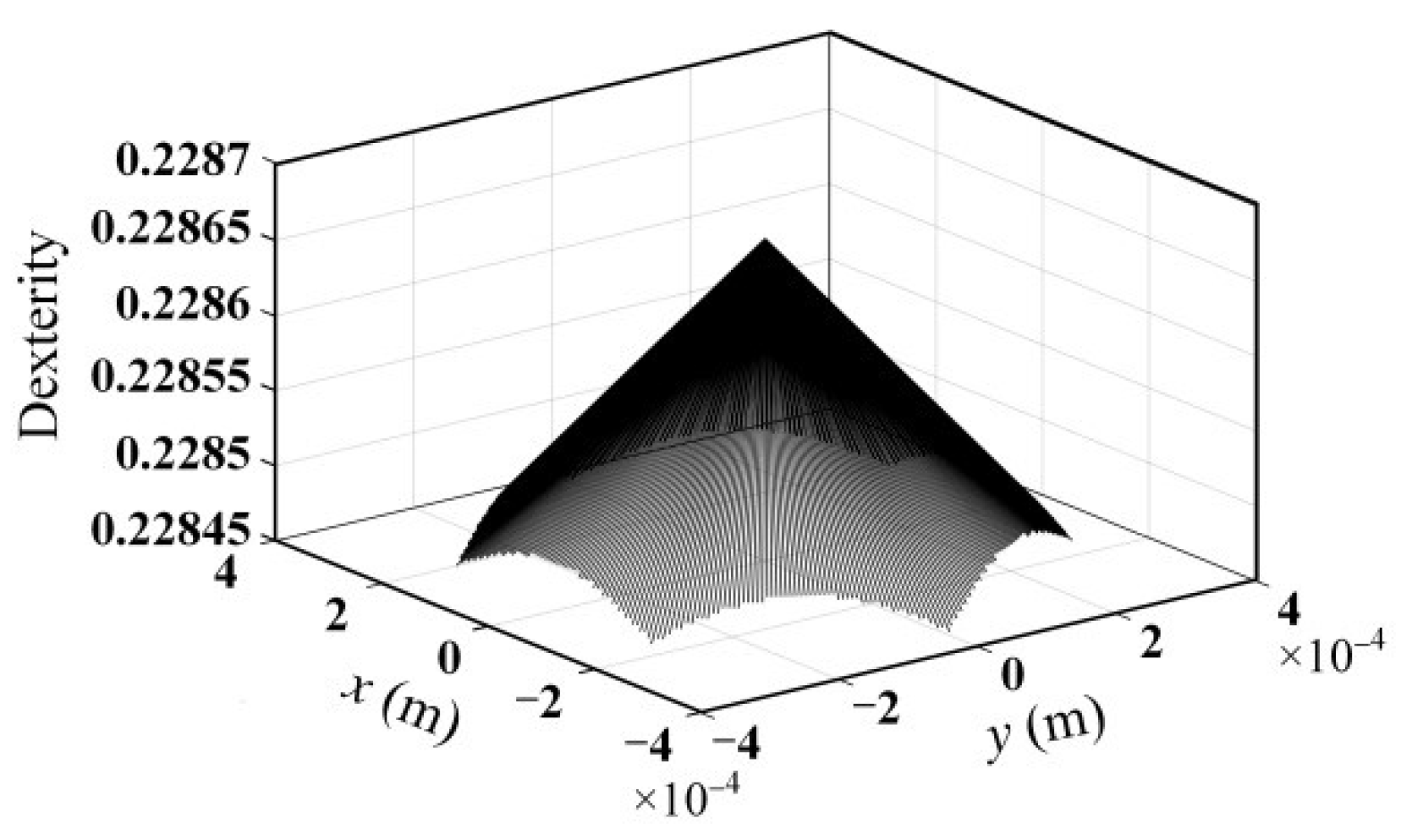
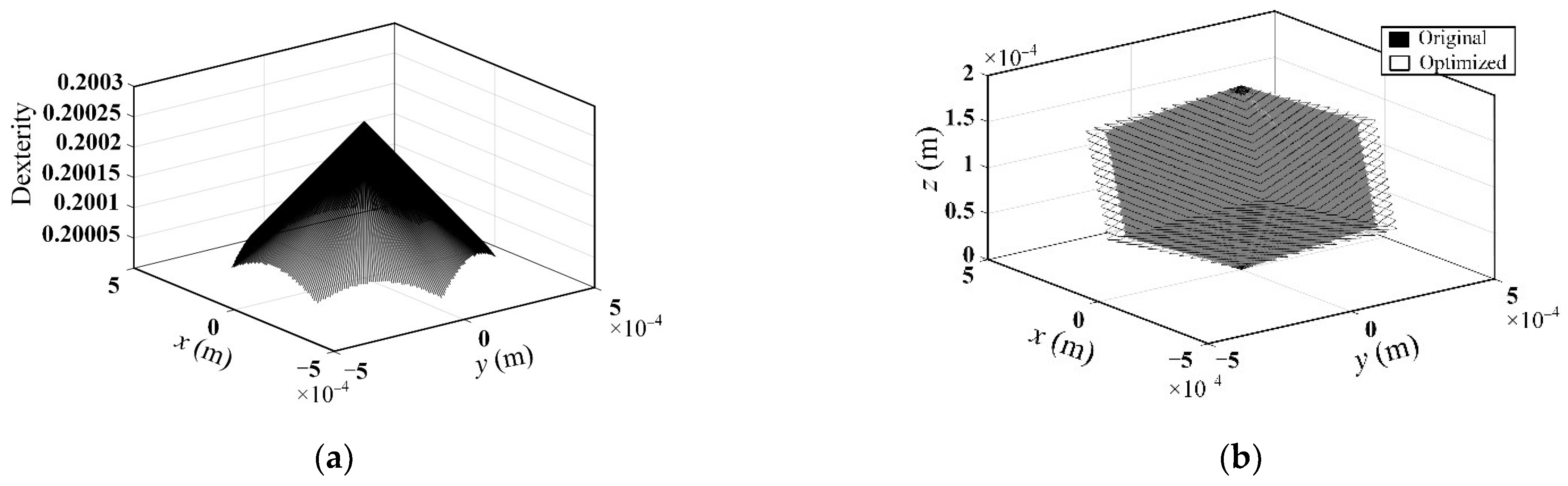
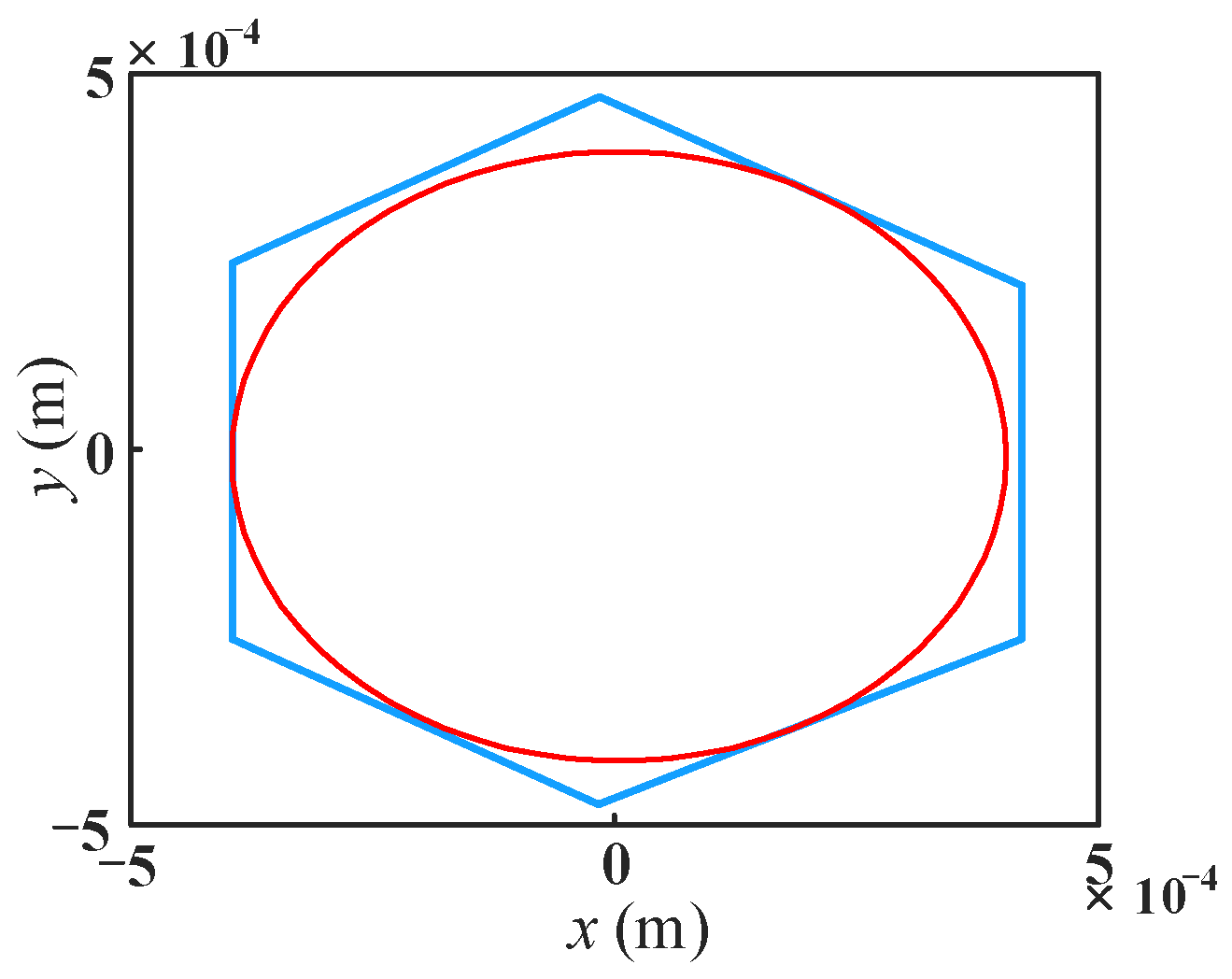
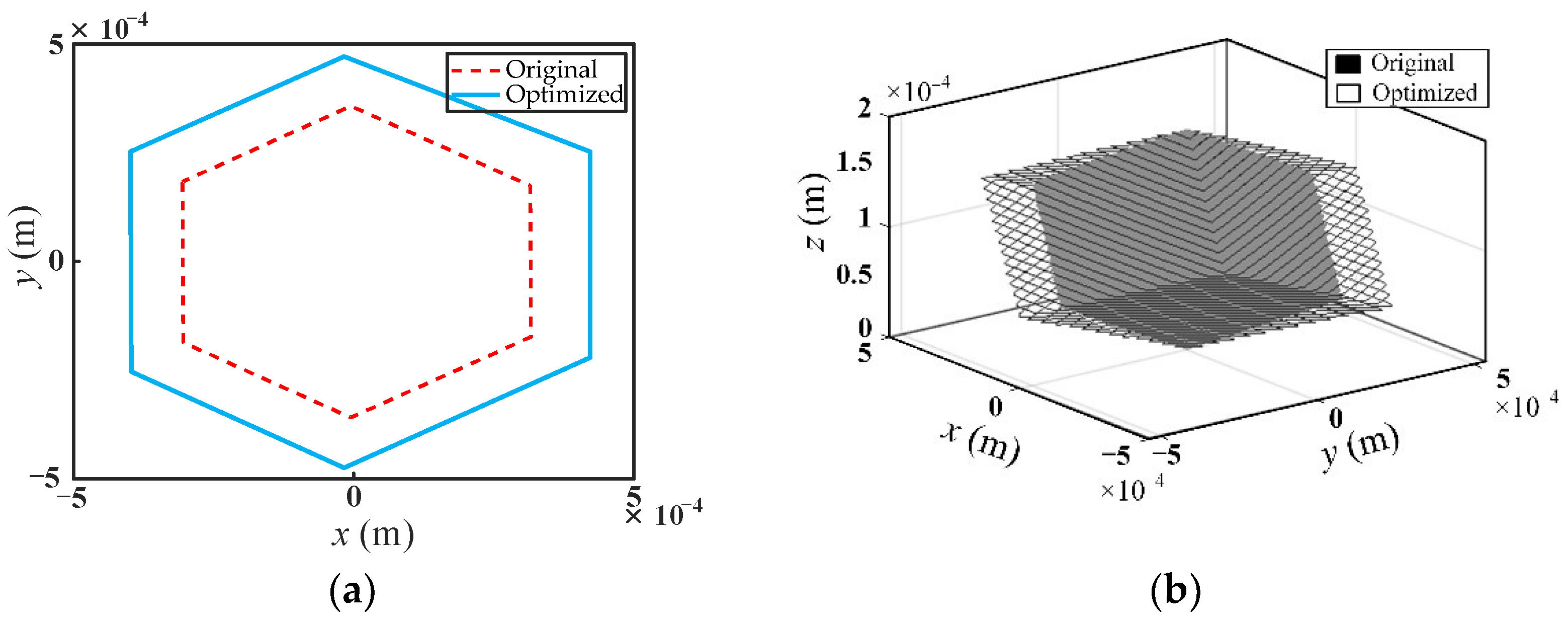
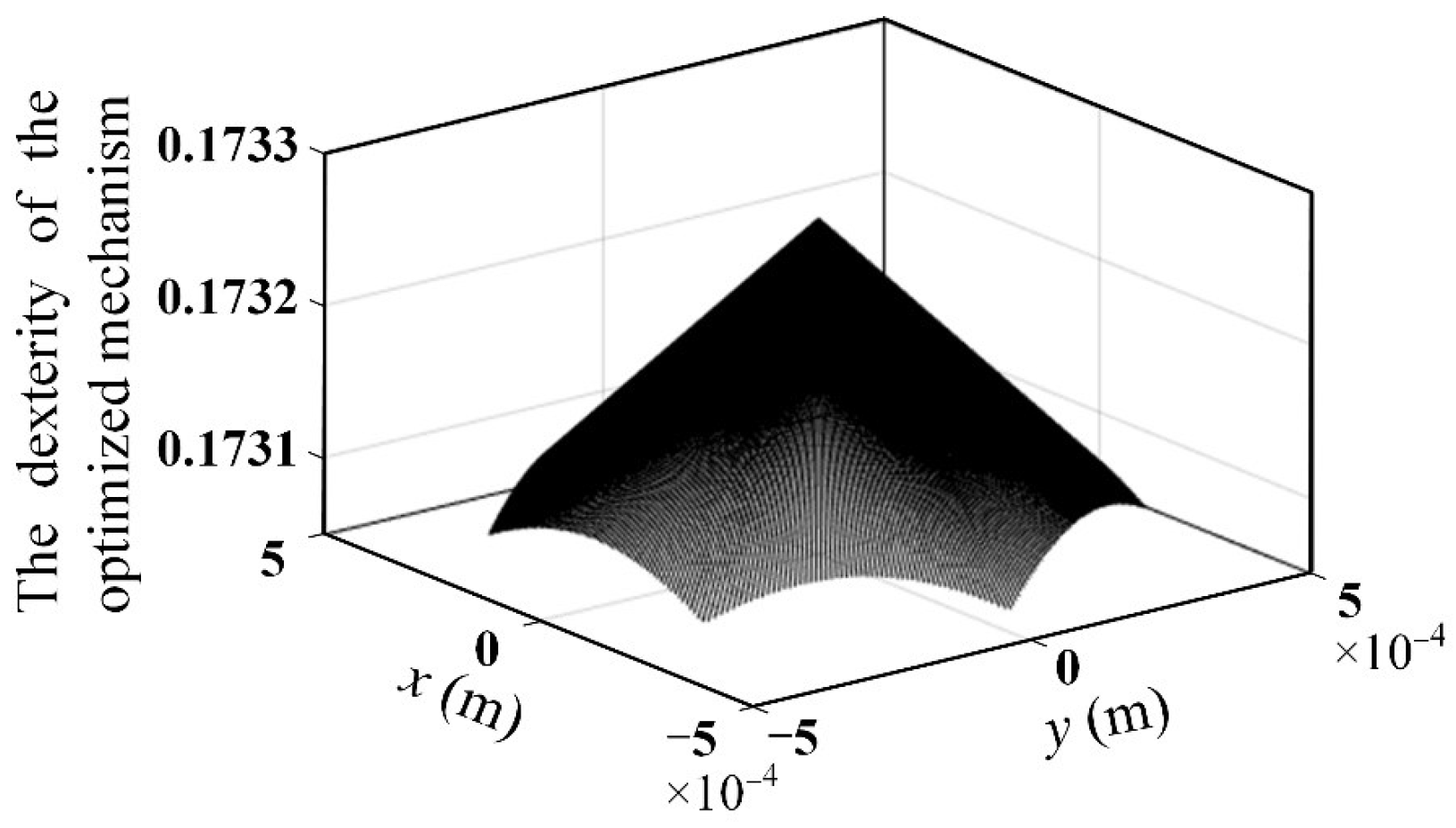
The dexterity distribution of the optimized mechanism on the maximum cross-section in the workspace is shown in
Figure 10a. It can be seen that maximum dexterity occurs at the center of the maximum cross-section. When the position of the moving platform changes, the dexterity changes accordingly, and the dexterity gradually decreases along the direction away from the center of the maximum cross-section. The comparison of the workspace volume between original and optimized designs is shown in
Figure 10b. It is demonstrated that the workspace volume of the optimized mechanism has increased by 14.17% compared with the original design. It is indicated that the optimal design of mechanism scale parameters based on kinematic performance is effective.
3.2. Optimization of Flexure Spherical Hinge Structure Parameters Based on Dynamic Performance
The scale parameters that meet the requirements of the kinematic performance of the micromanipulator were obtained through the above optimization design. However, the dynamic performance of the mechanism is not considered, which has an important impact on the high-frequency control scheme of the mechanism and the selection of the driver. Results from the related research [
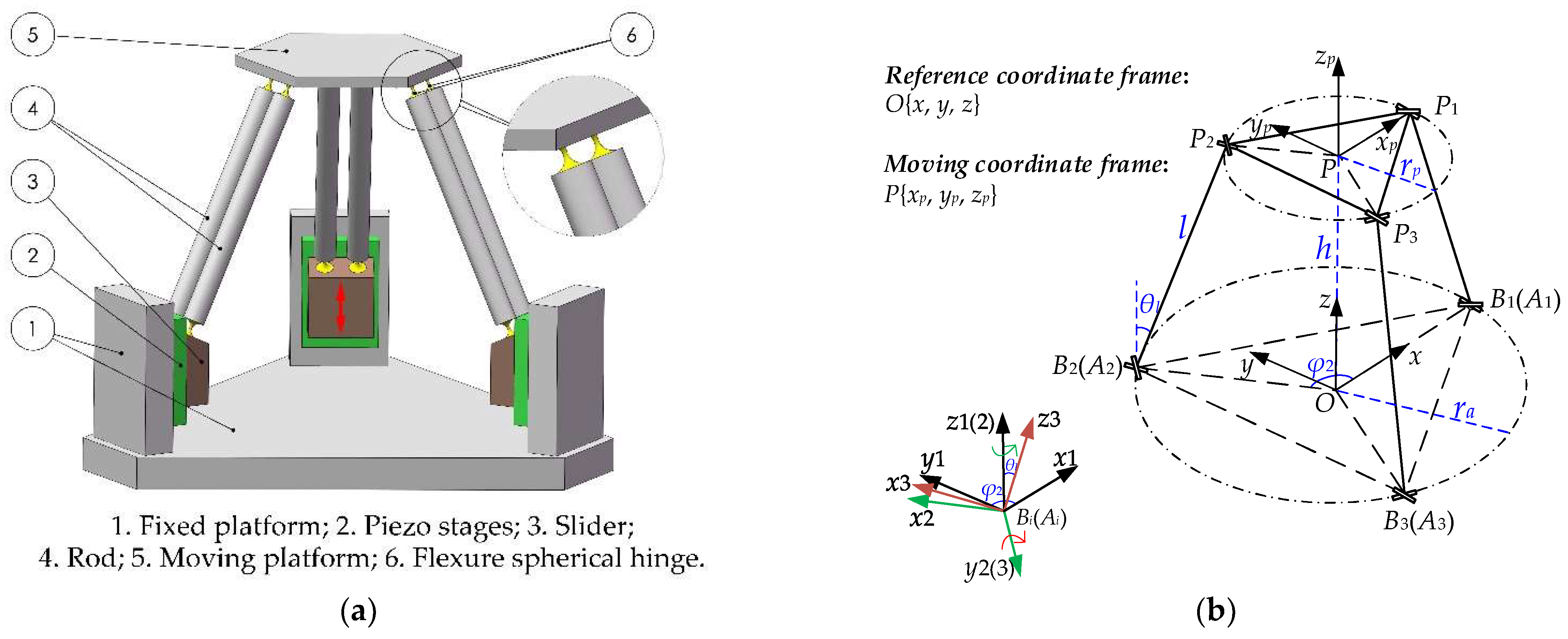
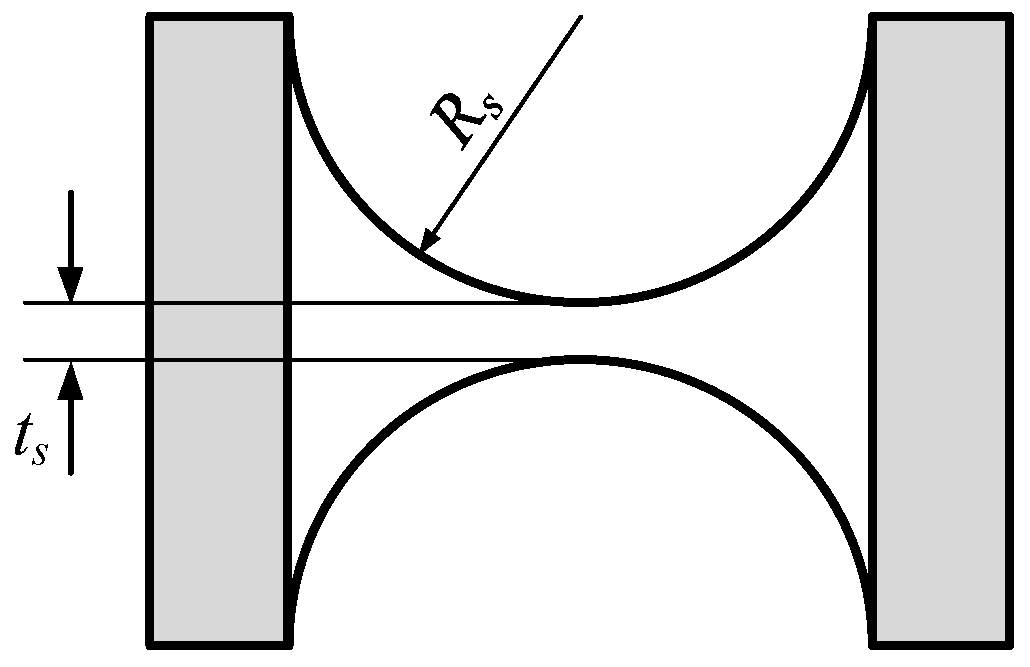
31] show that the dynamic performance of the flexible parallel micromanipulation mechanism is related to the micromanipulator’s scale parameters as well as the structural parameters of the flexure spherical hinge. Among them, the structural parameters of the flexure spherical hinge are the main factors affecting the dynamic performance of the micromanipulator. Therefore, the structural parameters of the flexure spherical hinge are chosen to further optimize its dynamic performance. The flexible hinge of the 3-PSS flexible parallel micromanipulator is a right-circular flexure spherical hinge, and its structural diagram is shown in
Figure 11. The main parameters of the flexible hinge are the minimum thickness
ts and the cutting radius
Rs. Therefore, the minimum thickness
ts and the cutting radius
Rs are selected as the optimization parameters.
The natural frequency is required to be greater than
times the fundamental frequency
fb of the driver (piezo stage) for preventing resonance, and
fb of the selected piezo stage is 37 Hz in this study. Meanwhile, the maximum stress
of the flexure spherical hinge during the movement of the mechanism should be less than the permissible stress
so as to prevent fatigue fracture. Considering the requirements of machining and deformation of the flexible spherical hinge, certain size ranges (unit: mm) are given for the structural parameters
ts and
Rs. In summary, the constraint expression for the optimal design can be written as:
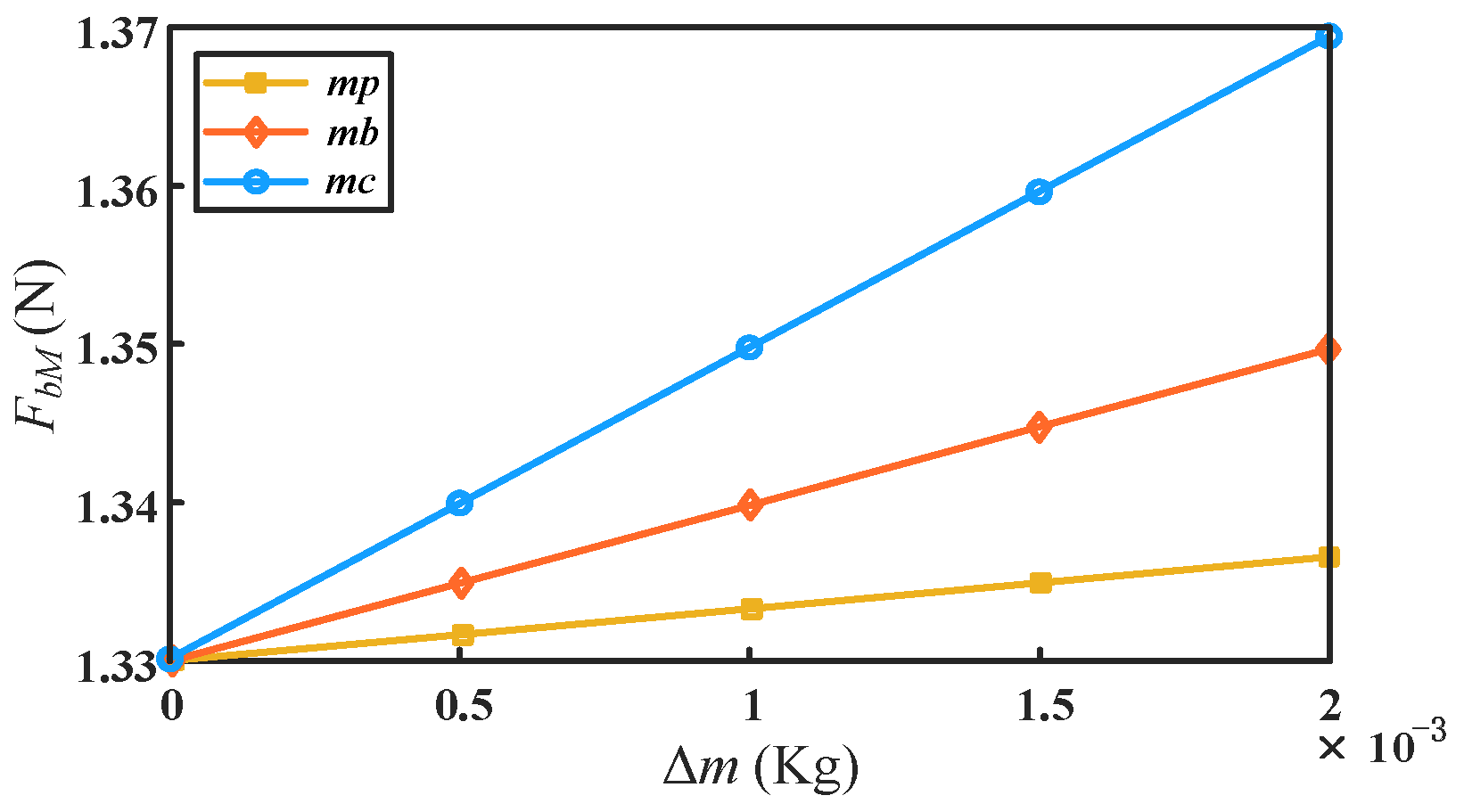
The driving force is an important dynamic performance of the micromanipulator and is therefore chosen as the optimization objective. It can be seen from the previous section that the driving force is mainly related to the total mass and stiffness of the mechanism. Generally, the driving force of the micromanipulator is smaller as the mass of the mechanism decreases. For brevity, the mass of the moving platform is set as a constant value, and the mass of the rod and the slider are set to be variable. Since the scale parameters have been determined according to the previous kinematic optimization results, the mass of the rod is only related to the diameter
D of the rod. According to the 3D structure shown in
Figure 1a, the diameter
D of the rod is required to be not less than the sum of the minimum thickness
ts and twice the cutting radius
Rs of the flexure spherical hinge. Here we assume that the diameter of rod
D =
ts + 2
Rs + 2 mm. In addition, the size of the slider is also directly related to the diameter of the rod
D. In summary, the total mass of the micromanipulator is mainly related to the structural parameters of the flexure spherical hinge. It can be seen from Equations (9) and (11) that under the same motion requirement, the smaller the total mass of the mechanism, the smaller the driving force required. Hence, the minimum total mass
M of the mechanism is taken as one of the optimization objectives.
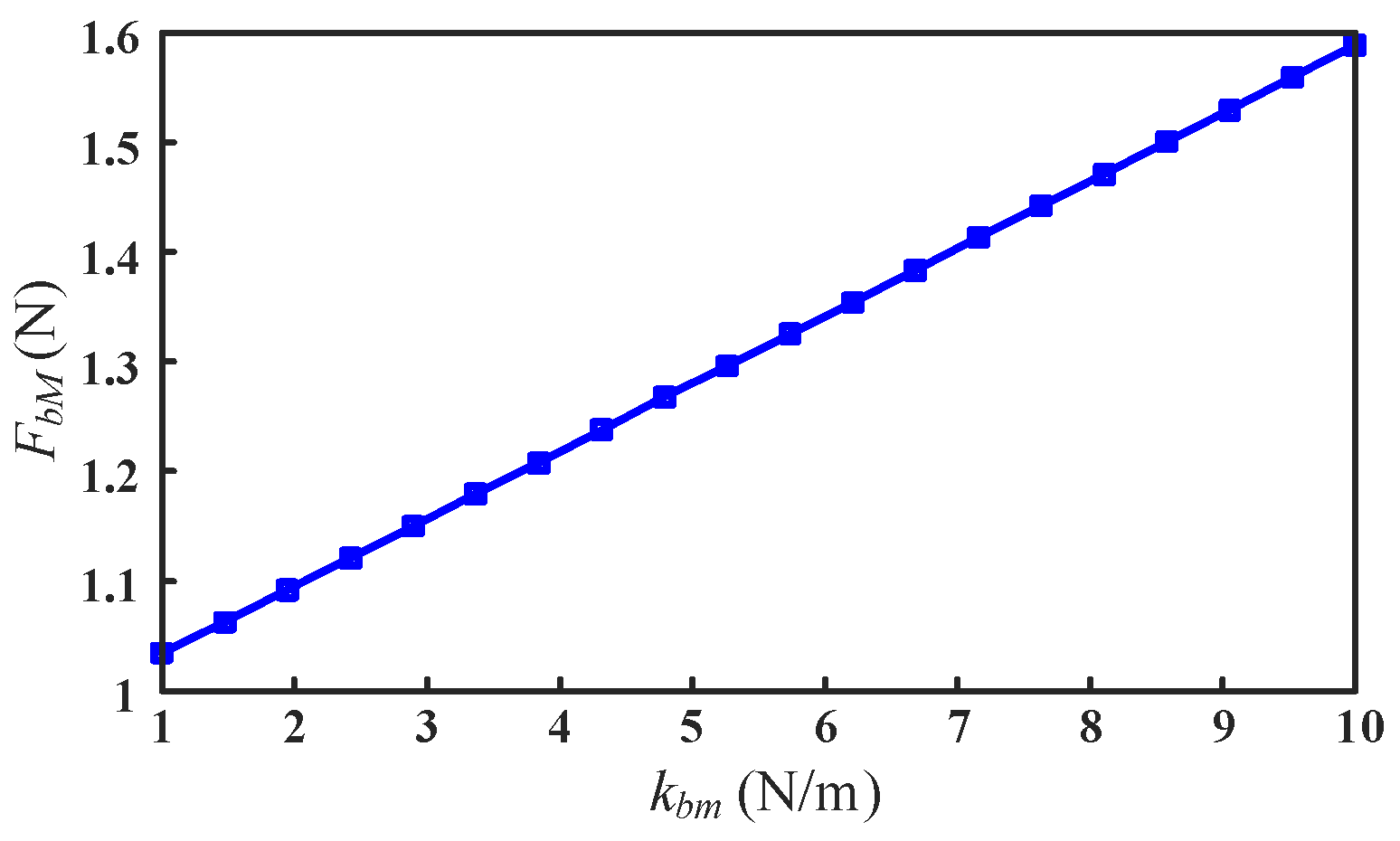
It is known from previous analysis that the bending stiffness
kbm of the flexure spherical hinge directly affects the overall stiffness of the mechanism, and further affects the driving force and natural frequencies of the micromanipulator. From the analysis of driving force characteristics in
Section 2.2, it can be seen that the less the stiffness of the flexure spherical hinge, the less the required driving force. Therefore, the minimum stiffness is chosen as another optimization objective.
Taking the above two optimization objectives into consideration, in order to make the required driving force small enough, a minimum weighted combination of the total mass of the mechanism and the bending stiffness of the flexible spherical hinge is selected as the overall optimization objective. The overall optimization objective function can be constructed as:
where the weight factor
α (
α ∈ [0, 1]) represents the proportion of bending stiffness in the optimization. In order to make the two optimization objectives (
k and
M) in the same order of magnitude, they are divided by
kmin and
Mmin, respectively, which represent the minimum values of bending stiffness and overall mass under the constraint conditions, respectively.
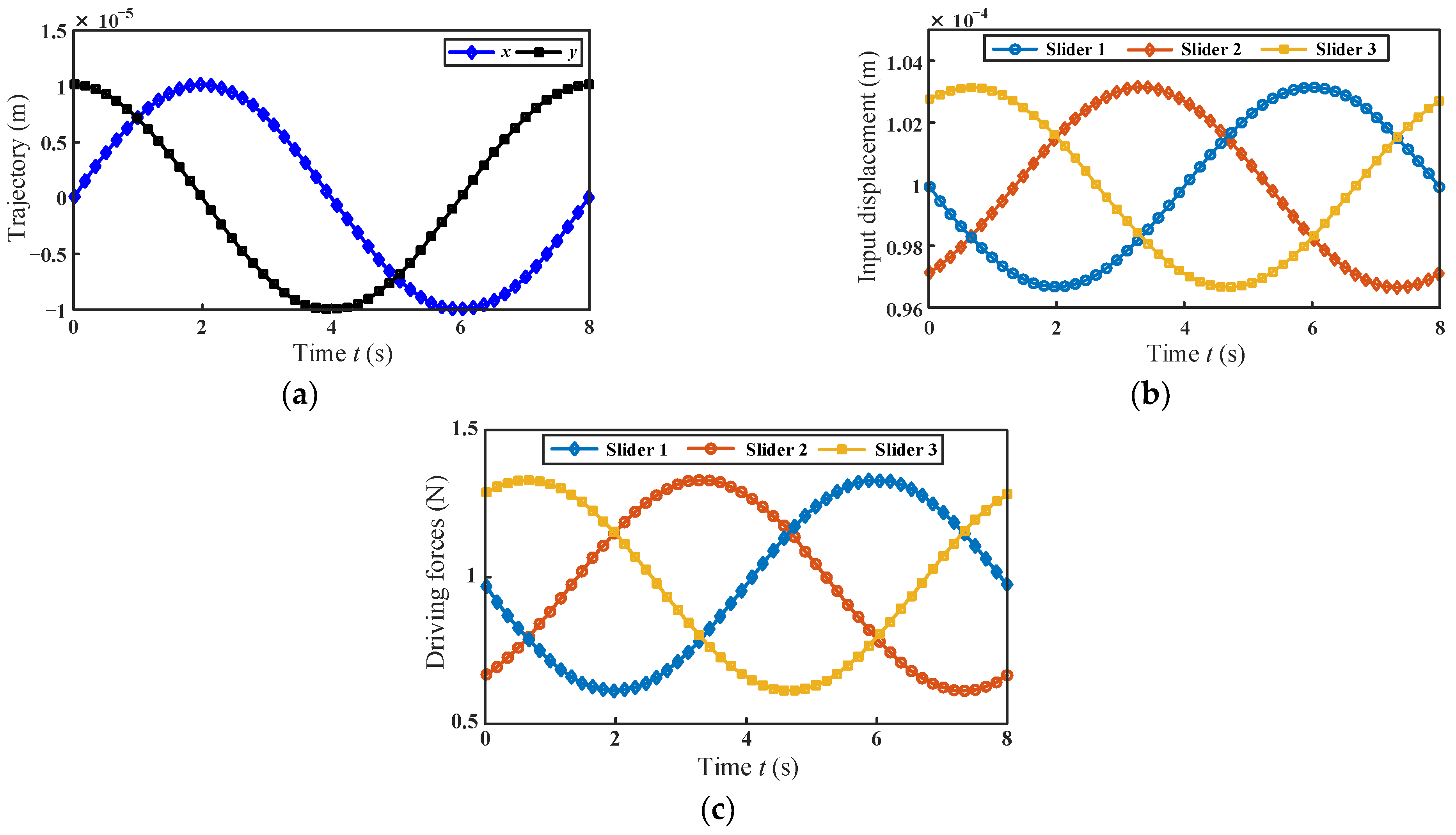
Governing the constraints in Equation (15) and the optimization objective in Equation (16), optimization is carried out by employing the genetic algorithm toolbox in MATLAB R2018b software. It should be noted that the optimization results of the structural parameters of the flexure spherical hinge are different under different weight factors. Taking the motion trajectory of Equation (17) as an example, we perform the optimization. In order to obtain the structural parameters of the flexure spherical hinge resulting in the smallest maximum absolute value of the driving force, the optimization results of structural parameters of the flexible spherical hinge under different weight factors are first obtained successively. Then we calculate the maximum absolute values
FbM of the driving force corresponding to each set of structural parameters. Relevant results are collected in
Table 2.
where
ω = π/4.
It can be seen from
Table 2 that the maximum absolute value
FbM of the driving force first decreases, then increases, and then remains unchanged as the stiffness weight factor
α increases with an interval of 0.1. After the weight factor is increased to 0.5, as it continues to increase, the optimization results remain unchanged. This is because when the weight
α is increased to 0.5, some parameters or properties of the optimized mechanism reach critical values of constraints, so continuing to increase
α will not change the optimization results. It is easy to find that the maximum absolute value
FbM of the driving force reached the smallest value (1.7303 N) when the weight factor
α is 0.3. However, the smallest value is very close to the maximum absolute value (1.7304 N) when the weight factor
α is 0.2. Therefore, in order to obtain a more ideal optimization model, another group of weight factors is selected between 0.2–0.3 with the interval of 0.01, and further optimization is carried out according to the above method. Results in
Table 3 show that the smallest maximum absolute value (1.7223 N) of the driving force appears as the weight factor α is 0.25. Correspondingly, the structure parameters of the flexure spherical hinge obtained by optimization are
ts = 0.8 mm and
Rs = 1.829 mm. In addition, it is interesting to note that no matter the weight factor,
α takes any value from 0.1 to 0.9, the optimization results of
ts always coincide with the minimum value in the constraints, that is 0.8. It demonstrates that the minimum thickness
ts of the flexible hinge has a larger impact on the driving forces compared to the cutting radius
Rs.
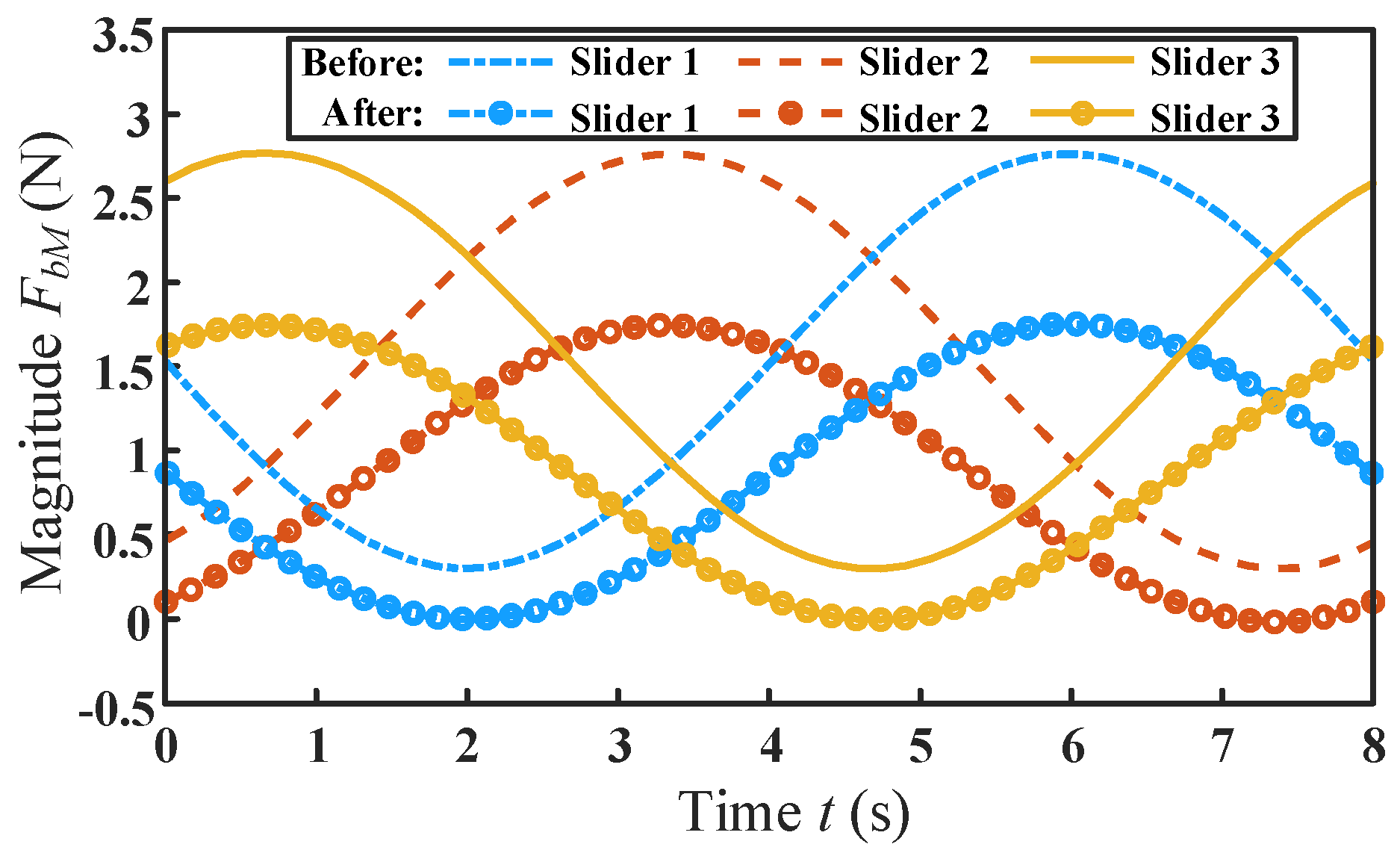
The comparison of driving forces before and after optimization is shown in
Figure 12. It can be seen that the variation trend of the driving forces before and after optimization is consistent. After optimization, the driving forces are decreased to different degrees on the entire time axis. Moreover, the maximum absolute value
FbM of driving forces is reduced by 34.54% compared with that before optimization.
The structural parameters of the flexure spherical hinge and the dynamic performance of the mechanism before and after optimization are shown in
Table 4. It can be seen from the comparison that the overall mass of the mechanism is reduced by 8.34% after optimization, which greatly reduces the inertial force of the mechanism. At the same time, it is also found that the stiffness and first-order natural frequency of the mechanism are reduced to a certain extent, but they are all within the allowable range. In addition, the ultimate angular displacement of the optimized flexure spherical hinge is slightly reduced, but it is still much larger than the initial set value of 1°. In conclusion, optimization based on dynamic performance is feasible and effective. It can be seen that when the acceleration in Equation (9) is 0, the dynamic equation is transformed into a static equation. Thus, the optimization method is also suitable for optimization design based on a quasi-static performance.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}