
Passivity-Based Control for Output Voltage Regulation in a Fuel Cell/Boost Converter System
 , , and
, , and
Abstract
:1. Introduction
- The design of a current-mode adaptive multi-loop PBC scheme for output voltage regulation of a fuel cell system.
- The design of an adaptive law based on I&I for inductor parasitic and load resistances.
- To the best of the authors’ knowledge, there are no studies of PBC applied to the fuel cell boost converter system reported in the literature.
2. System Description
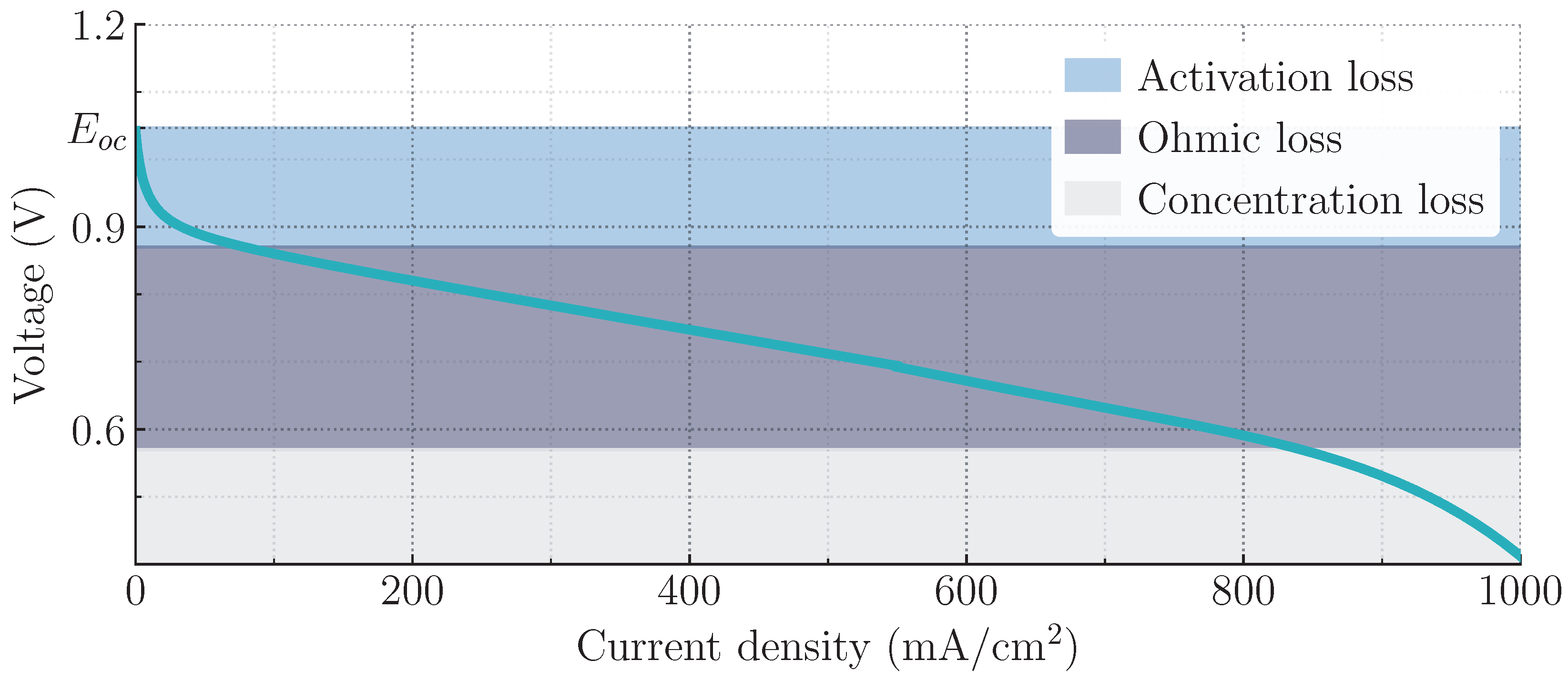
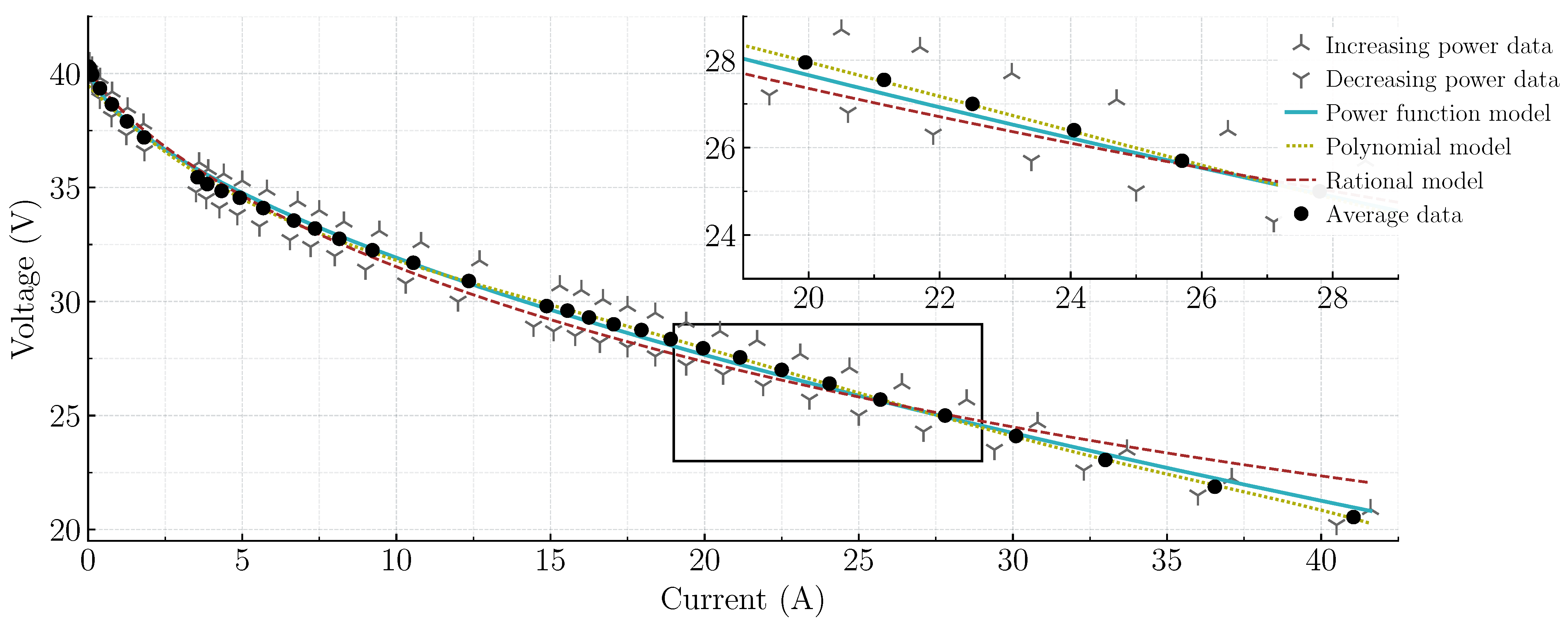
2.1. Fuel Cell Models Based on Experimental Data
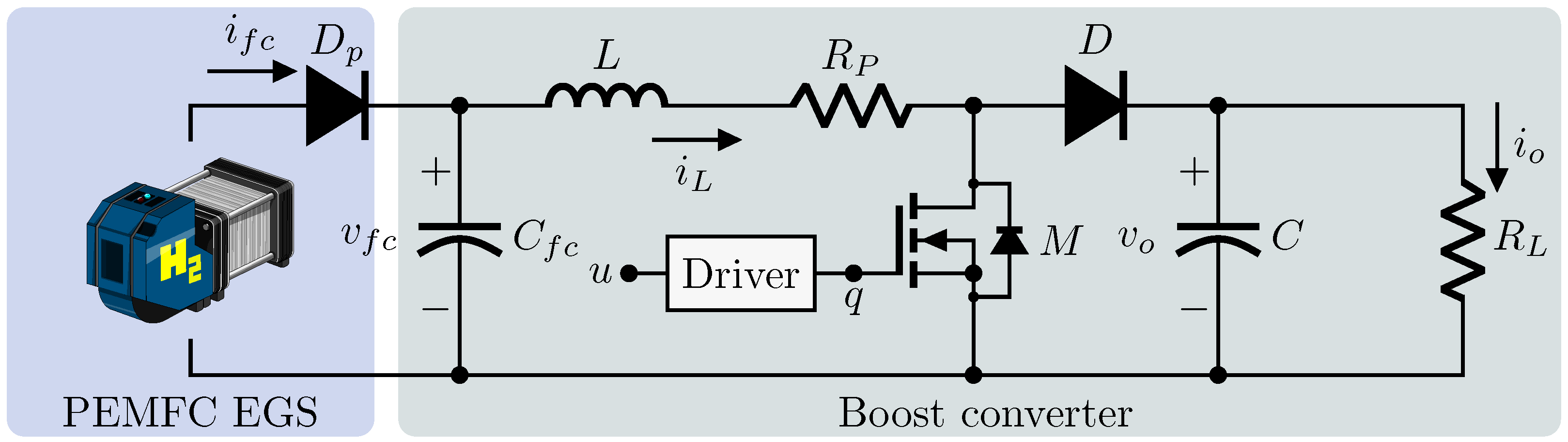
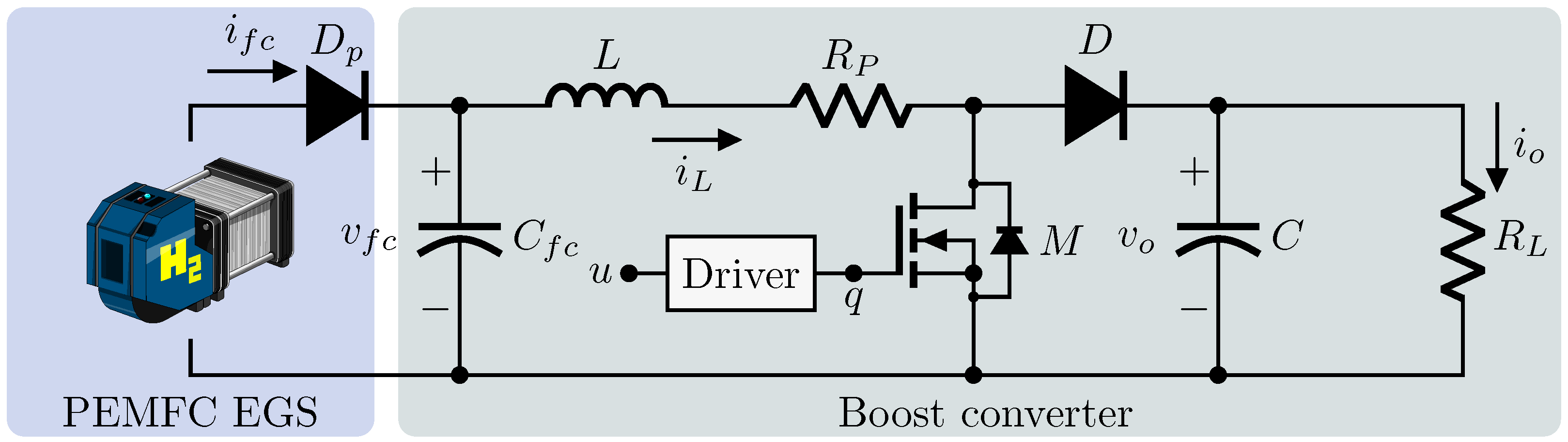
2.2. Fuel-Cell Coupled to the Boost Converter Model
2.3. Control Objectives
- O1.
- Current tracking. To fulfill this objective, an inner (current) control loop is designed. This loop assures the correct tracking of the state x towards the desired state . Formally, this control objective is described as:
- O2.
- Voltage regulation. To fulfill this objective, an outer (voltage) loop is designed to regulate the voltage at a constant reference voltage . Formally, this control objective is described as:
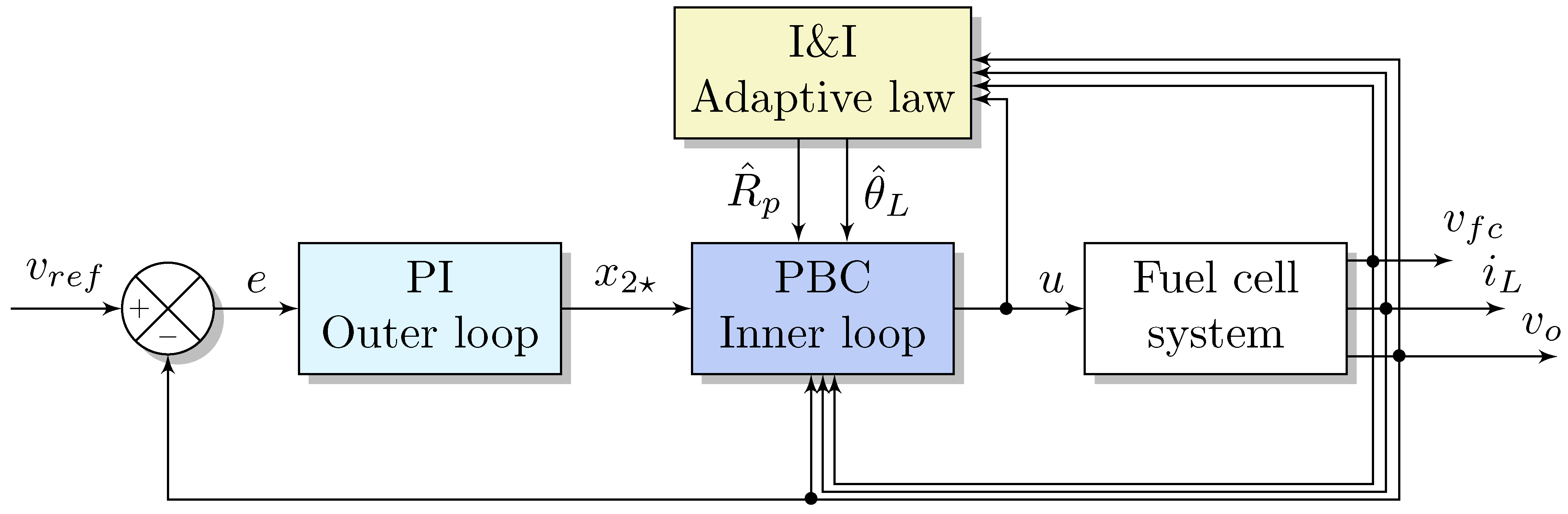
3. Passivity-Based Controller Design
3.1. Outer Control Loop Design
3.2. Inner Control Loop Design
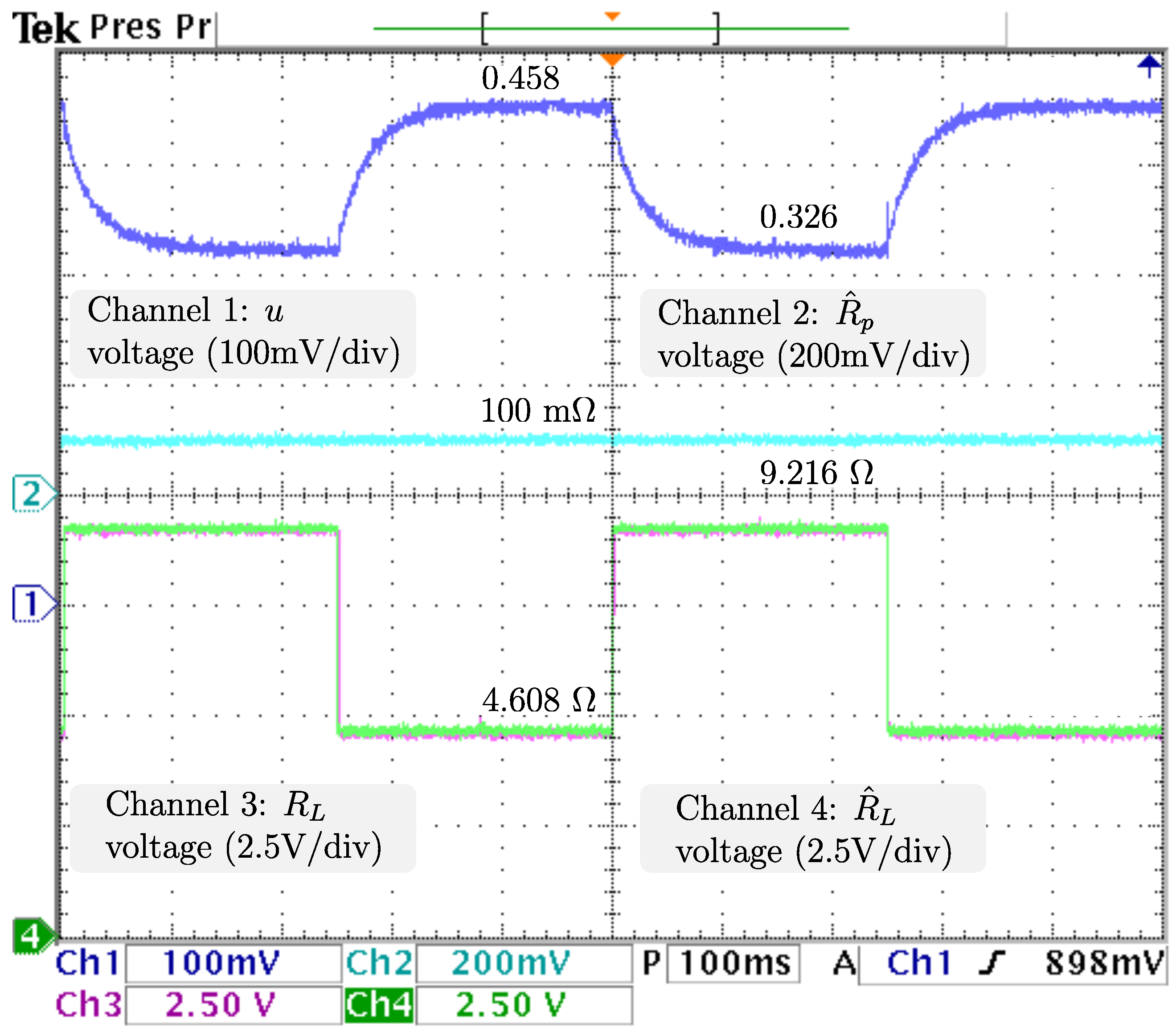
3.3. Adaptive Law Design
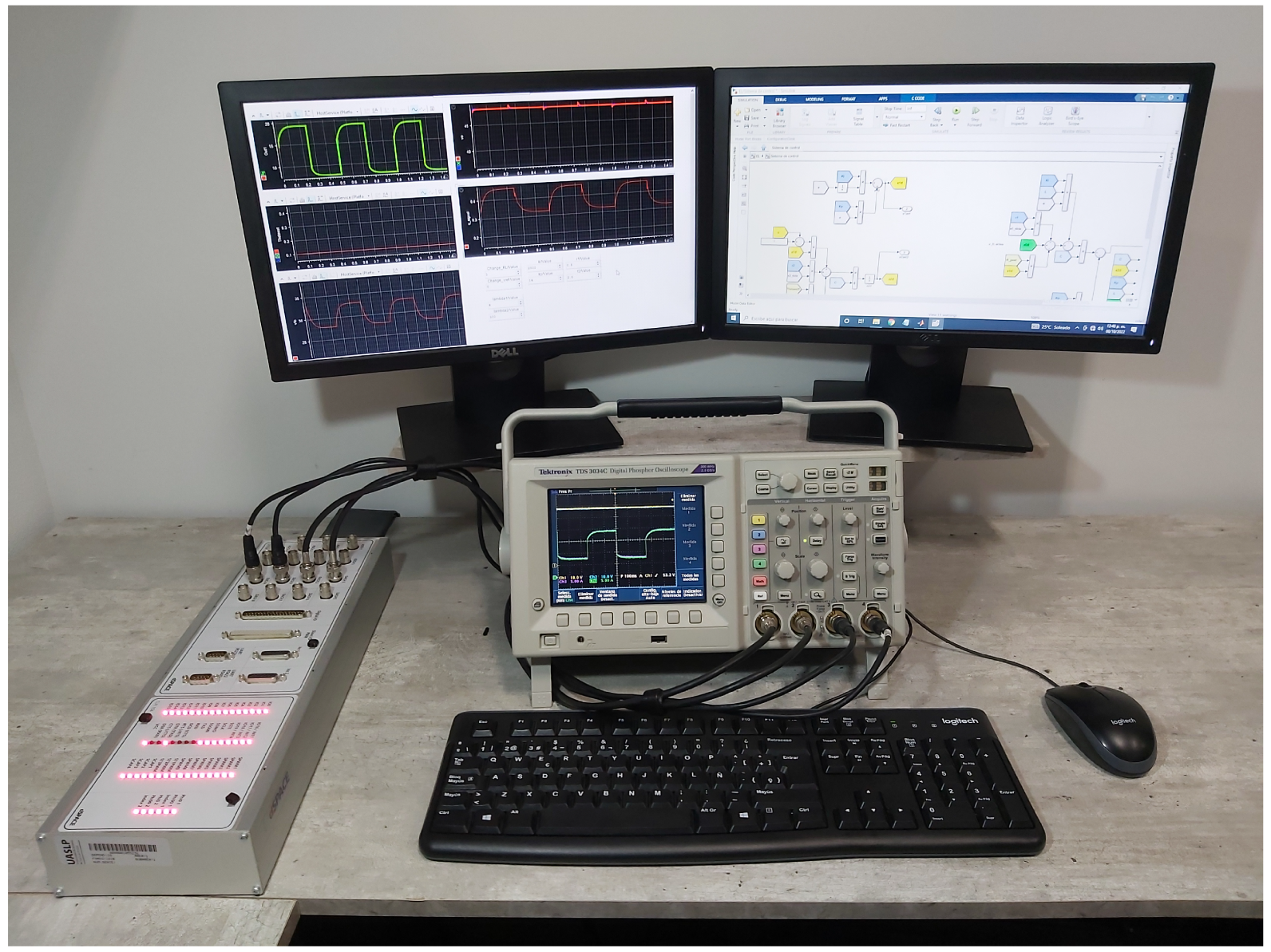
4. Real-Time Numerical Results
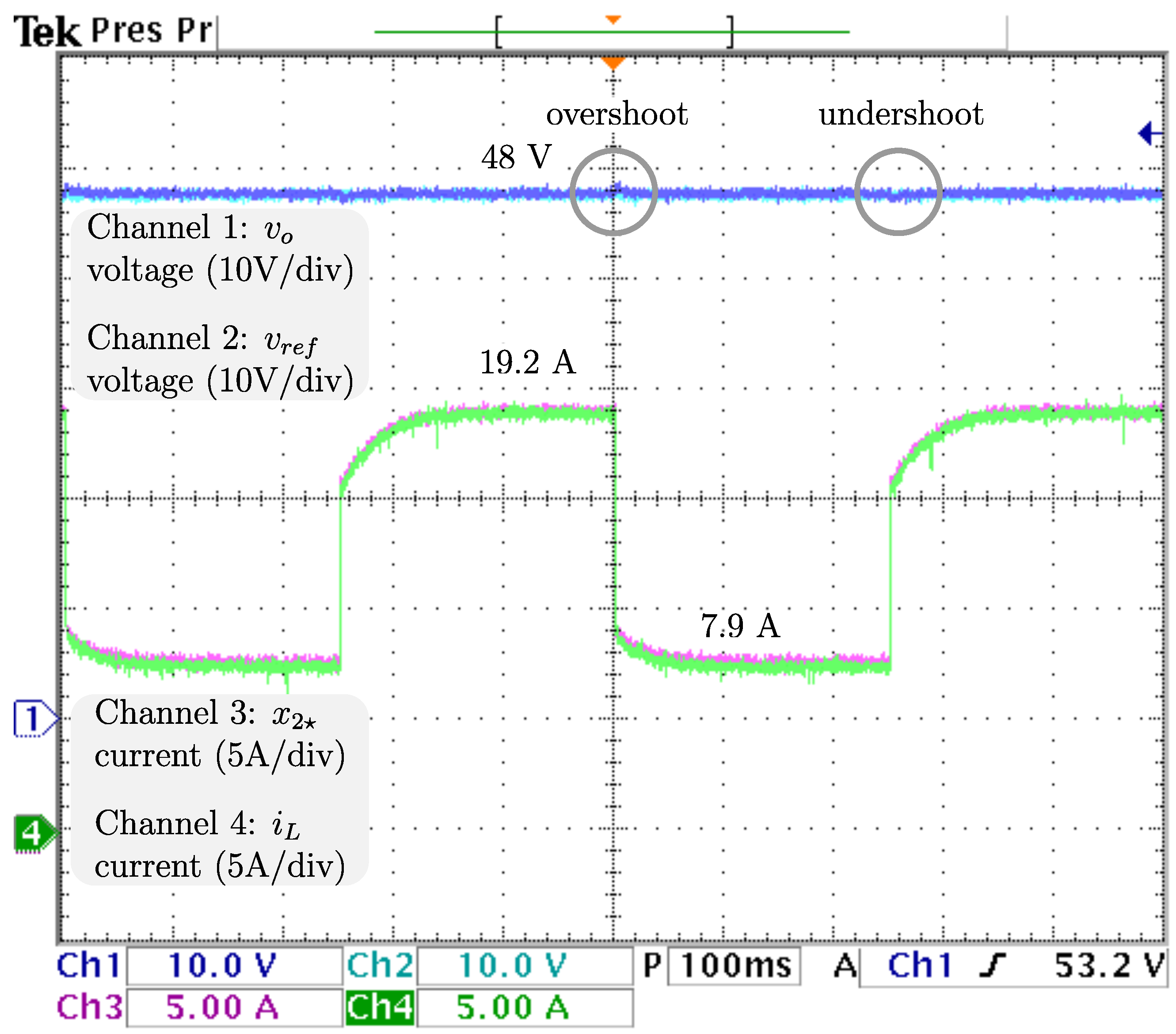
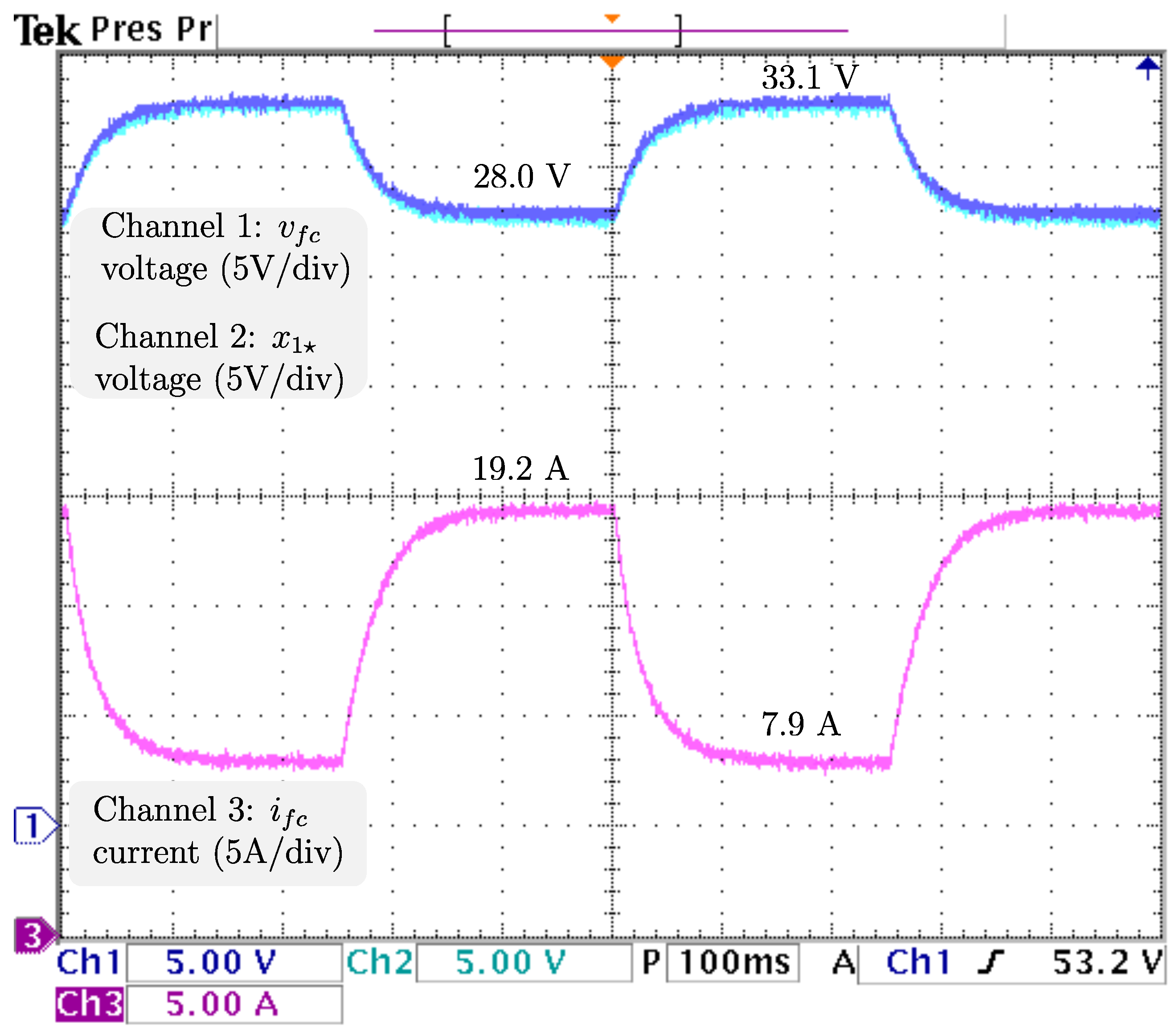
4.1. Sudden Load Changes
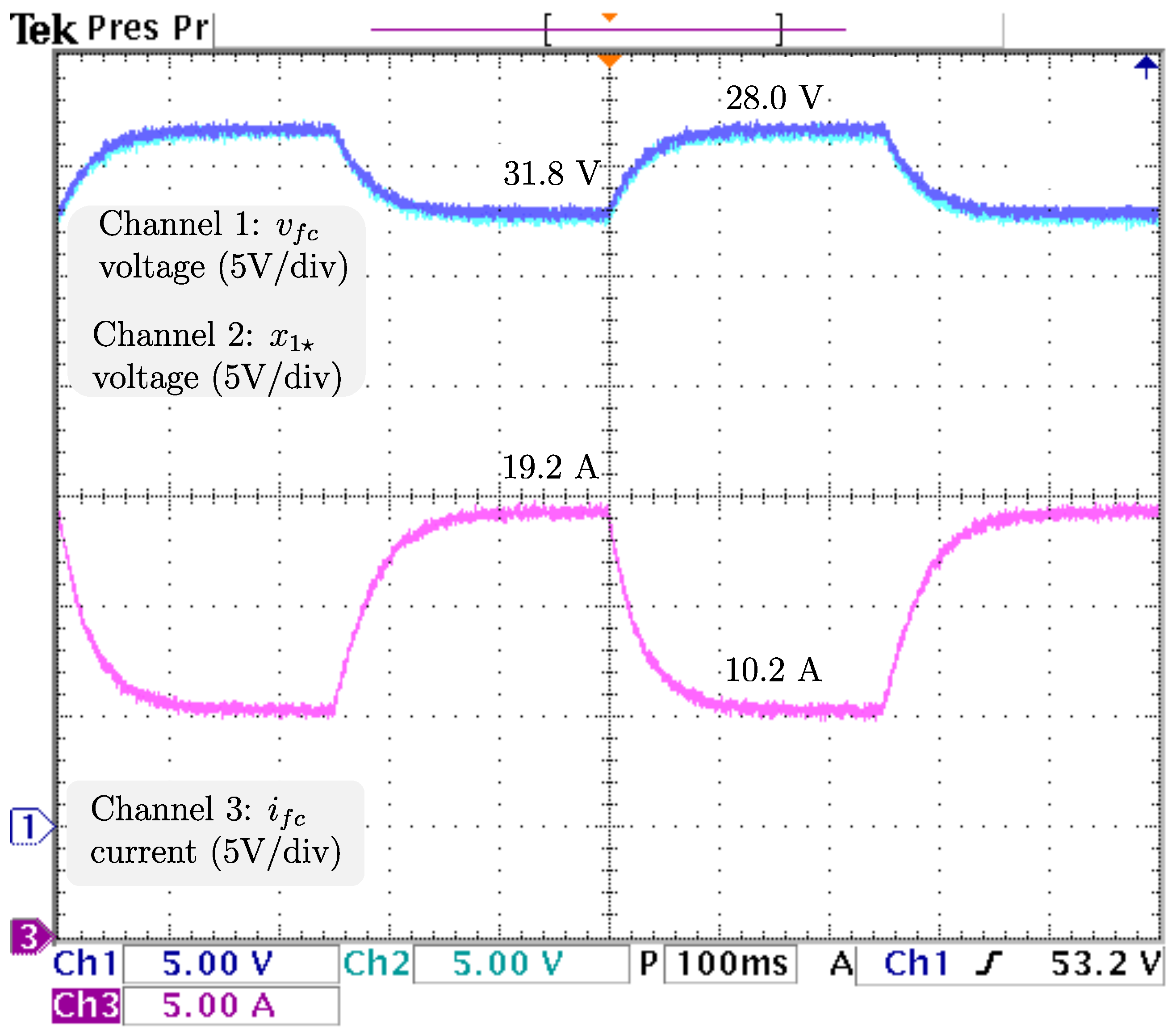
4.2. Sudden Output Voltage Changes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dicks, A.L.; Rand, D.A.J. Fuel Cell Systems Explained, 1st ed.; Wiley: Hoboken, NJ, USA, 2018; pp. 1–460. [Google Scholar] [CrossRef]
- Ogungbemi, E.; Ijaodola, O.; Khatib, F.N.; Wilberforce, T.; Hassan, Z.E.; Thompson, J.; Ramadan, M.; Olabi, A.G. Fuel cell membranes—Pros and cons. Energy 2019, 172, 155–172. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Seo, B.; Wang, B.; Zamel, N.; Jiao, K.; Adroher, X.C. Fundamentals, materials, and machine learning of polymer electrolyte membrane fuel cell technology. Energy AI 2020, 1, 100014. [Google Scholar] [CrossRef]
- Fam, J.Y.; Wong, S.Y.; Basri, H.B.M.; Abdullah, M.O.; Lias, K.B.; Mekhilef, S. Predictive Maximum Power Point Tracking for Proton Exchange Membrane Fuel Cell System. IEEE Access 2021, 9, 157384–157397. [Google Scholar] [CrossRef]
- IRENA. Geopolitics of the Energy Transformation: The Hydrogen Factor; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2022; p. 117. [Google Scholar]
- Hilairet, M.; Ghanes, M.; Béthoux, O.; Tanasa, V.; Barbot, J.P.; Normand-Cyrot, D. A passivity-based controller for coordination of converters in a fuel cell system. Control. Eng. Pract. 2013, 21, 1097–1109. [Google Scholar] [CrossRef] [Green Version]
- Behdani, A.; Naseh, M.R. Power management and nonlinear control of a fuel cell–supercapacitor hybrid automotive vehicle with working condition algorithm. Int. J. Hydrog. Energy 2017, 42, 24347–24357. [Google Scholar] [CrossRef]
- Kong, S.; Bressel, M.; Hilairet, M.; Roche, R. Advanced passivity-based, aging-tolerant control for a fuel cell/super-capacitor hybrid system. Control. Eng. Pract. 2020, 105, 104636. [Google Scholar] [CrossRef]
- Khan, S.S.; Shareef, H.; Kandidayeni, M.; Boulon, L.; Amine, A.; Abdennebi, E.H. Dynamic Semiempirical PEMFC Model for Prognostics and Fault Diagnosis. IEEE Access 2021, 9, 10217–10227. [Google Scholar] [CrossRef]
- Liu, H.; Yin, H.; Ding, T.; Huang, X.; Gao, J. Cathode Pressure Control of Air Supply System for PEMFC. IFAC-PapersOnLine 2021, 54, 247–252. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Peng, H.; Stefanopoulou, A.G. Control-Oriented Modeling and Analysis for Automotive Fuel Cell Systems. J. Dyn. Syst. Meas. Control. 2004, 126, 14–25. [Google Scholar] [CrossRef]
- Diaz-Saldierna, L.H.; Leyva-Ramos, J.; Langarica-Cordoba, D.; Morales-Saldaña, J.A. Control strategy of switching regulators for fuel-cell power applications. IET Renew. Power Gener. 2017, 11, 799–805. [Google Scholar] [CrossRef] [Green Version]
- Ferrara, A.; Okoli, M.; Jakubek, S.; Hametner, C. Energy Management of Heavy-Duty Fuel Cell Electric Vehicles: Model Predictive Control for Fuel Consumption and Lifetime Optimization. IFAC-PapersOnLine 2020, 53, 14205–14210. [Google Scholar] [CrossRef]
- Li, C.; Li, X.; Jiang, W. Model-based Control Strategy Research for the Hydrogen System of Fuel Cell. IFAC-PapersOnLine 2021, 54, 67–71. [Google Scholar] [CrossRef]
- Ramírez, A.; Gomez, M.A. Proportional Integral Retarded Control of a Proton Exchange Membrane Fuel Cell System. IFAC-PapersOnLine 2021, 54, 52–57. [Google Scholar] [CrossRef]
- Habib, M.; Khoucha, F.; Harrag, A. GA-based robust LQR controller for interleaved boost DC–DC converter improving fuel cell voltage regulation. Electr. Power Syst. Res. 2017, 152, 438–456. [Google Scholar] [CrossRef]
- Saadi, R.; Hammoudi, M.; Kraa, O.; Ayad, M.; Bahri, M. A robust control of a 4-leg floating interleaved boost converter for fuel cell electric vehicle application. Math. Comput. Simul. 2020, 167, 32–47. [Google Scholar] [CrossRef]
- Salimi, M.; Pornadem, M. A modular transformerless DC-DC step-up converter with very high voltage gain and adjustable switch stress. EPE J. 2018, 28, 75–88. [Google Scholar] [CrossRef]
- Andrade, A.M.S.S.; da Silva Martins, M.L. Study and Analysis of Pulsating and Nonpulsating Input and Output Current of Ultrahigh-Voltage Gain Hybrid DC–DC Converters. IEEE Trans. Ind. Electron. 2020, 67, 3776–3787. [Google Scholar] [CrossRef]
- Sarkar, T.T.; Mahanta, C. Estimation Based Sliding Mode Control of DC-DC Boost Converters. IFAC-PapersOnLine 2022, 55, 467–472. [Google Scholar] [CrossRef]
- Goudarzian, A.; Khosravi, A.; Raeisi, H.A. Optimized sliding mode current controller for power converters with non-minimum phase nature. J. Frankl. Inst. 2019, 356, 8569–8594. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhuo, S.; Chen, F.; Pang, S.; Zhao, D.; Gao, F. Robust Voltage Control of Floating Interleaved Boost Converter for Fuel Cell Systems. IEEE Trans. Ind. Appl. 2018, 54, 665–674. [Google Scholar] [CrossRef]
- Wang, J.; Luo, W.; Liu, J.; Wu, L. Adaptive Type-2 FNN-Based Dynamic Sliding Mode Control of DC-DC Boost Converters. IEEE Trans. Syst. Man. Cybern. Syst. 2021, 51, 2246–2257. [Google Scholar] [CrossRef]
- Gil-Antonio, L.; Saldivar, B.; Portillo-Rodriguez, O.; Vazquez-Guzman, G.; Oca-Armeaga, S.M.D. Trajectory Tracking Control for a Boost Converter Based on the Differential Flatness Property. IEEE Access 2019, 7, 63437–63446. [Google Scholar] [CrossRef]
- Zuniga-Ventura, Y.A.; Leyva-Ramos, J.; Diaz-Saldiema, L.H.; Diaz-Diaz, I.A.; Langarica-Cordoba, D. Nonlinear Voltage Regulation Strategy for a Fuel Cell/Supercapacitor Power Source System; IEEE: Manhattan, NY, USA, 2018; pp. 2373–2378. [Google Scholar] [CrossRef]
- Zuniga-Ventura, Y.A.; Langarica-Cordoba, D.; Leyva-Ramos, J.; Diaz-Saldierna, L.H.; Ramirez-Rivera, V.M. Adaptive Backstepping Control for a Fuel Cell/Boost Converter System. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 686–695. [Google Scholar] [CrossRef]
- Rosa, A.; Morais, L.; Fortes, G.; Júnior, S.S. Practical considerations of nonlinear control techniques applied to static power converters: A survey and comparative study. Int. J. Electr. Power Energy Syst. 2021, 127, 106545. [Google Scholar] [CrossRef]
- Montoya, O.; Gil-Gonzalez, W.; Garces, A.; Serra, F.; Hernandez, J. PI-PBC Approach for Voltage Regulation in Ćuk Converters with Adaptive Load Estimation; IEEE: Manhattan, NY, USA, 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Ortega, R.; Loría, A.; Nicklasson, P.J.; Sira-Ramírez, H. Passivity-Based Control of Euler-Lagrange Systems, 1st ed.; Springer: London, UK, 1998. [Google Scholar] [CrossRef]
- Ortega, R.; van der Schaft, A.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef] [Green Version]
- Ortega, R.; García-Canseco, E. Interconnection and Damping Assignment Passivity-Based Control: A Survey. Eur. J. Control. 2004, 10, 432–450. [Google Scholar] [CrossRef]
- Sankar, K.; Saravanakumar, G.; Jana, A.K. Nonlinear multivariable control of an integrated PEM fuel cell system with a DC-DC boost converter. Chem. Eng. Res. Des. 2021, 167, 141–156. [Google Scholar] [CrossRef]
- Astolfi, A.; Ortega, R. Immersion and invariance: A new tool for stabilization and adaptive control of nonlinear systems. IEEE Trans. Autom. Control. 2003, 48, 590–606. [Google Scholar] [CrossRef] [Green Version]
- Astolfi, A.; Karagiannis, D.; Ortega, R. Nonlinear and Adaptive Control with Applications; Springer: London, UK, 2008. [Google Scholar] [CrossRef]
- Lan, T.; Strunz, K. Modeling of multi-physics transients in PEM fuel cells using equivalent circuits for consistent representation of electric, pneumatic, and thermal quantities. Int. J. Electr. Power Energy Syst. 2020, 119, 105803. [Google Scholar] [CrossRef]
- Djerioui, A.; Houari, A.; Zeghlache, S.; Saim, A.; Benkhoris, M.F.; Mesbahi, T.; Machmoum, M. Energy management strategy of Supercapacitor/Fuel Cell energy storage devices for vehicle applications. Int. J. Hydrog. Energy 2019, 44, 23416–23428. [Google Scholar] [CrossRef]
- Shahin, A.; Hinaje, M.; Martin, J.P.; Pierfederici, S.; Rael, S.; Davat, B. High Voltage Ratio DC–DC Converter for Fuel-Cell Applications. IEEE Trans. Ind. Electron. 2010, 57, 3944–3955. [Google Scholar] [CrossRef]
- Benmouna, A.; Becherif, M.; Depernet, D.; Ebrahim, M.A. Novel Energy Management Technique for Hybrid Electric Vehicle via Interconnection and Damping Assignment Passivity Based Control. Renew. Energy 2018, 119, 116–128. [Google Scholar] [CrossRef]
- Langarica-Cordoba, D.; Martinez-Rodriguez, P.R.; Diaz-Saldierna, L.H.; Leyva-Ramos, J.; Reyes-Cruz, D.; Iturriaga-Medina, S. Passivity-based control for a DC/DC high-gain transformerless boost converter. Asian J. Control. 2022, 25, 26–39. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, W.; Hu, J.; Ye, X. Closed-Loop Analysis and Cascade Control of a Nonminimum Phase Boost Converter. IEEE Trans. Power Electron. 2011, 26, 1237–1252. [Google Scholar] [CrossRef]
- Leyva-Ramos, J.; Mota-Varona, R.; Ortiz-Lopez, M.G.; Diaz-Saldierna, L.H.; Langarica-Cordoba, D. Control Strategy of a Quadratic Boost Converter With Voltage Multiplier Cell for High-Voltage Gain. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1761–1770. [Google Scholar] [CrossRef]
- Lu, J.; Savaghebi, M.; Guan, Y.; Vasquez, J.C.; Ghias, A.M.; Guerrero, J.M. A reduced-order enhanced state observer control of DC-DC Buck Converter. IEEE Access 2018, 6, 56184–56191. [Google Scholar] [CrossRef]
- Liu, T.; Lin, M.; Ai, J. High Step-Up Interleaved dc-dc Converter with Asymmetric Voltage Multiplier Cell and Coupled Inductor. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 4209–4222. [Google Scholar] [CrossRef]
- Komurcugil, H. Improved passivity-based control method and its robustness analysis for single-phase uninterruptible power supply inverters. IET Power Electron. 2015, 8, 1558–1570. [Google Scholar] [CrossRef]
- Flota-Bañuelos, M.; Miranda-Vidales, H.; Fernández, B.; Ricalde, L.J.; Basam, A.; Medina, J. Harmonic Compensation via Grid-Tied Three-Phase Inverter with Variable Structure I&I Observer-Based Control Scheme. Energies 2022, 15, 6419. [Google Scholar] [CrossRef]
- Gong, L.; Wang, M.; Zhu, C. Immersion and Invariance Manifold Adaptive Control of the DC-Link Voltage in Flywheel Energy Storage System Discharge. IEEE Access 2020, 8, 144489–144502. [Google Scholar] [CrossRef]
- He, W.; Namazi, M.M.; Koofigar, H.R.; Amirian, M.A.; Blaabjerg, F. Stabilization of DC–DC buck converter with unknown constant power load via passivity-based control plus proportion-integration. IET Power Electron. 2021, 14, 2597–2609. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel Cell/Boost Converter Parameters | Control/Adaptative Law Gains | ||||||
|---|---|---|---|---|---|---|---|
| a | 2.219 | C | 1.5 mF | 14 | 2.5 | ||
| b | 0.5848 | 50 mF | 2500 | 4 | |||
| 40.45 | L | 36.1 H | 1 | 100 | |||
| 0.1 | 0.5 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beltrán, C.A.; Diaz-Saldierna, L.H.; Langarica-Cordoba, D.; Martinez-Rodriguez, P.R. Passivity-Based Control for Output Voltage Regulation in a Fuel Cell/Boost Converter System. Micromachines 2023, 14, 187. https://doi.org/10.3390/mi14010187
Beltrán CA, Diaz-Saldierna LH, Langarica-Cordoba D, Martinez-Rodriguez PR. Passivity-Based Control for Output Voltage Regulation in a Fuel Cell/Boost Converter System. Micromachines. 2023; 14(1):187. https://doi.org/10.3390/mi14010187
Chicago/Turabian StyleBeltrán, Carlo A., Luis H. Diaz-Saldierna, Diego Langarica-Cordoba, and Panfilo R. Martinez-Rodriguez. 2023. "Passivity-Based Control for Output Voltage Regulation in a Fuel Cell/Boost Converter System" Micromachines 14, no. 1: 187. https://doi.org/10.3390/mi14010187