


Thread-Embedded-in-PDMS Wearable Strain Sensor for Real-Time Monitoring of Human Joint Motion



Abstract
:1. Introduction
2. Experiment
2.1. Materials and Equipment
2.2. Fabrication of the Sensors
2.3. Measurement Circuit and Apparatus
2.4. Microscopic Characterization and Initial Resistance Measurement of the Sensor Core Wires
2.5. Performance Evaluation of the Strain Sensors
2.6. Comprehensive Electromechanical Performance Evaluation of PBT-CCI-CNT-S Strain Sensor
2.7. On-Trial Tests
3. Results and Discussion
3.1. Microscopic Morphology and the Resistance of the Core Wires
3.2. Performance Testing and Comparison of Four Strain Sensors
3.3. Comprehensive Evaluation of the Electromechanical Performance of the PBT-CCI-CNT-S Strain Sensor
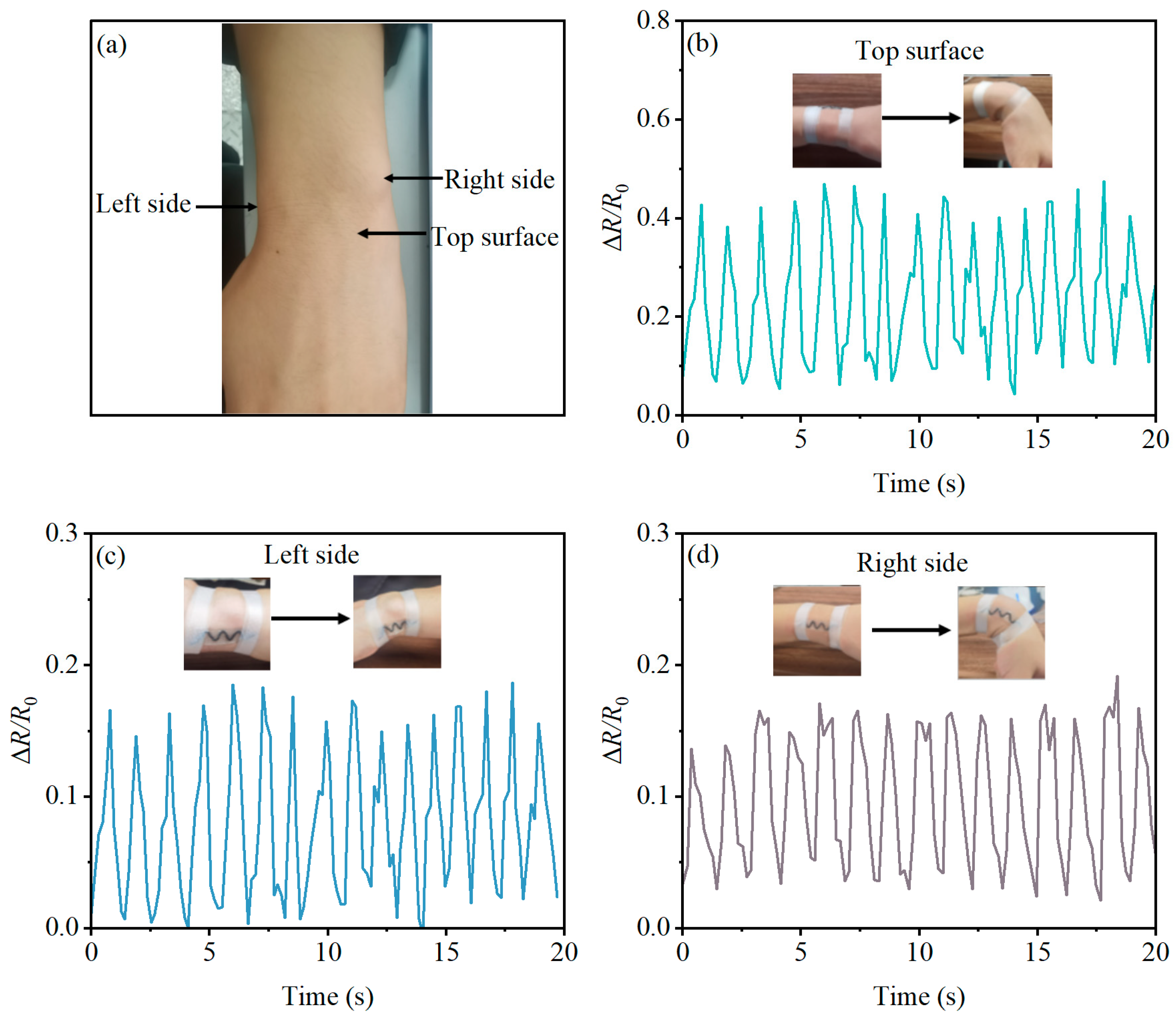
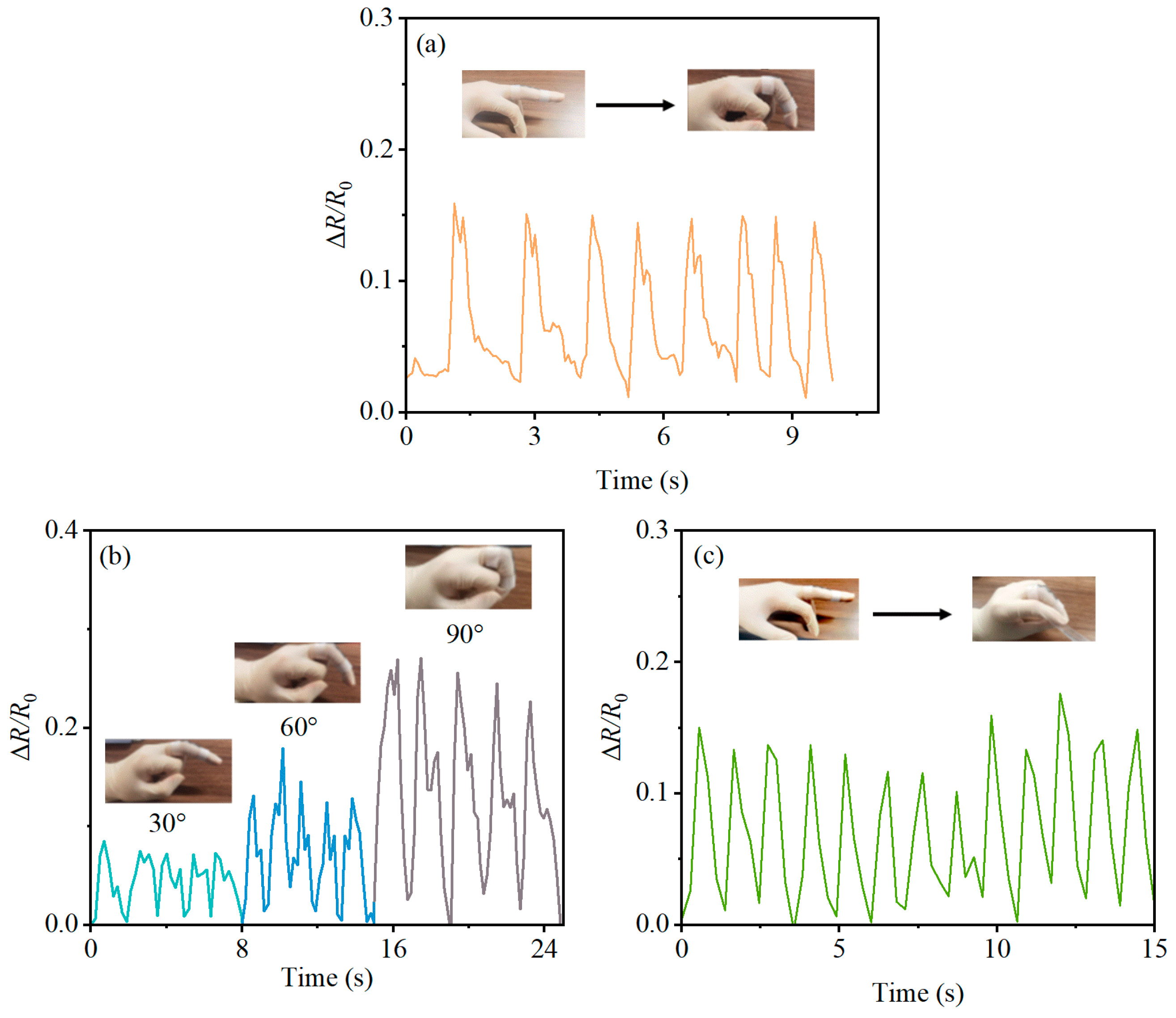
3.4. On-Trial Tests
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, M.; Sun, N.; Lai, X.; Wu, J.; Wu, L.; Zhao, X.; Feng, L. Paper-based sandwich-structured wearable sensor with sebum filtering for continuous detection of sweat pH. ACS Sens. 2023, 8, 176–186. [Google Scholar] [CrossRef]
- Yang, M.; Sun, N.; Lai, X.; Li, Y.; Zhao, X.; Wu, J.; Zhou, W. Screen-printed wearable sweat sensor for cost-effective assessment of human hydration status through potassium and sodium ion detection. Micromachines 2023, 14, 1497. [Google Scholar] [CrossRef]
- Chen, Y.; Yuan, X.; Li, C.; Ruan, R.; You, H. Self-healing and self-adhesive substrate-free tattoo electrode. Materials 2023, 16, 3499. [Google Scholar] [CrossRef]
- Ates, H.C.; Nguyen, P.Q.; Gonzalez-Macia, L.; Morales-Narváez, E.; Güder, F.; Collins, J.J.; Dincer, C. End-to-end design of wearable sensors. Nat. Rev. Mater. 2022, 7, 887–907. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, K.; Fernando, A.; Gao, Y.; Li, G.; Jin, L.; Zhai, H.; Yi, Y.; Xu, L.; Zheng, Y.; et al. Permeable graphited hemp fabrics-based, wearing-comfortable pressure sensors for monitoring human activities. Chem. Eng. J. 2020, 403, 126191. [Google Scholar] [CrossRef]
- Zhang, J.-H.; Li, Z.; Xu, J.; Li, J.; Yan, K.; Cheng, W.; Xin, M.; Zhu, T.; Du, J.; Chen, S.; et al. Versatile self-assembled electrospun micropyramid arrays for high-performance on-skin devices with minimal sensory interference. Nat. Commun. 2022, 13, 5839. [Google Scholar] [CrossRef]
- Hempel, M.; Nezich, D.; Kong, J.; Hofmann, M. A Novel Class of Strain Gauges Based on Layered Percolative Films of 2D Materials. Nano Lett. 2012, 12, 5714–5718. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, G.; Yang, R.; Lu, X.; Cheng, M.; He, C.; Xie, G.; Meng, J.; Shi, D.; Zhang, G. Tunable Piezoresistivity of Nanographene Films for Strain Sensing. ACS Nano 2015, 9, 1622–1629. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and Highly Sensitive Graphene Strain Sensors for Human Motion Monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, Y.; Jin, L.; Chen, K.; Zhai, H.; Huang, Q.; Chen, Z.; Yi, Y.; Umar, M.; Xu, L.; et al. Highly Breathable and Stretchable Strain Sensors with Insensitive Response to Pressure and Bending. Adv. Funct. Mater. 2021, 31, 2007622. [Google Scholar] [CrossRef]
- Leong, W.X.R.; Al-Dhahebi, A.M.; Ahmad, M.R.; Saheed, M.S.M. Ti3C2Tx MXene-polymeric strain sensor with huge gauge factor for body movement detection. Micromachines 2022, 13, 1302. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Shen, G.; Liang, J.; Liu, Z.; Xin, Y.; Liang, T.; He, J.; Zhang, C.; Chen, Y.; He, X. Stretchable strain sensors based on two-and three-dimensional carbonized cotton fabrics for the detection of full range of human motions. ACS Appl. Electron. Mater. 2021, 3, 3287–3295. [Google Scholar] [CrossRef]
- Wang, J.; Lu, C.; Zhang, K. Textile-Based Strain Sensor for Human Motion Detection. Energy Environ. Mater. 2019, 3, 80–100. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, Y.; Zhao, J.; Wu, G.; Tao, X.; Chen, W. Self-Powered Piezoionic Strain Sensor toward the Monitoring of Human Activities. Small 2016, 12, 5074–5080. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Samad, Y.A.; Taha, T.; Cai, G.; Fu, S.-Y.; Liao, K. Highly Flexible Strain Sensor from Tissue Paper for Wearable Electronics. ACS Sustain. Chem. Eng. 2016, 4, 4288–4295. [Google Scholar] [CrossRef]
- Souri, H.; Bhattacharyya, D. Highly stretchable multifunctional wearable devices based on conductive cotton and wool fabrics. ACS Appl. Mater. Interfaces 2018, 10, 20845–20853. [Google Scholar] [CrossRef]
- Liu, W.; Liu, N.; Gao, Y.; Wang, S.; Cheng, Q.; Xu, F. Strain sensing fabric integrated with carbon nanotube yarn for wearable applications. Text. Res. J. 2018, 89, 3048–3055. [Google Scholar] [CrossRef]
- Sun, H.; Dai, K.; Zhai, W.; Zhou, Y.; Li, J.; Zheng, G.; Li, B.; Liu, C.; Shen, C. A Highly Sensitive and Stretchable Yarn Strain Sensor for Human Motion Tracking Utilizing a Wrinkle-Assisted Crack Structure. ACS Appl. Mater. Interfaces 2019, 11, 36052–36062. [Google Scholar] [CrossRef]
- Alamer, F.A.; Aldeih, A.; Alsalmi, O.; Althagafy, K.; Al-Dossari, M. Construction of an Electrical Conductor, Strain Sensor, Electrical Connection and Cycle Switch Using Conductive Graphite Cotton Fabrics. Polymers 2022, 14, 4767. [Google Scholar] [CrossRef]
- Yan, T.; Wu, Y.; Tang, J.; Pan, Z. Highly sensitive strain sensor with wide strain range fabricated using carbonized natural wrapping yarns. Mater. Res. Bull. 2021, 143, 111452. [Google Scholar] [CrossRef]
- Sadeqi, A.; Nejad, H.R.; Alaimo, F.; Yun, H.; Punjiya, M.; Sonkusale, S.R. Washable Smart Threads for Strain Sensing Fabrics. IEEE Sens. J. 2018, 18, 9137–9144. [Google Scholar] [CrossRef]
- Yang, M.; Pan, J.; Xu, A.; Luo, L.; Cheng, D.; Cai, G.; Wang, J.; Tang, B.; Wang, X. Conductive Cotton Fabrics for Motion Sensing and Heating Applications. Polymers 2018, 10, 568. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Huiming, N.; Hu, N.; Liu, Y.; Liu, F.; Zou, R.; Kaiyan, H.; Wu, X.; Weng, S.; Alamusi. Environmentally-friendly and multifunctional graphene-silk fabric strain sensor for human-motion detection. Adv. Mater. Interfaces 2020, 7, 1901507. [Google Scholar] [CrossRef]
- Yoshii, Y.; Yuine, H.; Kazuki, O.; Tung, W.-L.; Ishii, T. Measurement of wrist flexion and extension torques in different forearm positions. BioMed. Eng. OnLine 2015, 14, 115. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Linear Range | Linearity in the Linear Range |
|---|---|---|
| PBT-CCI | 0–10% | R2 = 0.9283 |
| PBT-CCI-S | 0–60% | R2 = 0.9849 |
| PBT-CCI-CNT | 0–10% | R2 = 0.9938 |
| PBT-CCI-CNT-S | 0–60% | R2 = 0.9991 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Liu, Y.; Yang, W.; Liu, J. Thread-Embedded-in-PDMS Wearable Strain Sensor for Real-Time Monitoring of Human Joint Motion. Micromachines 2023, 14, 2250. https://doi.org/10.3390/mi14122250
Yang M, Liu Y, Yang W, Liu J. Thread-Embedded-in-PDMS Wearable Strain Sensor for Real-Time Monitoring of Human Joint Motion. Micromachines. 2023; 14(12):2250. https://doi.org/10.3390/mi14122250
Chicago/Turabian StyleYang, Mingpeng, Yongquan Liu, Wenjing Yang, and Jia Liu. 2023. "Thread-Embedded-in-PDMS Wearable Strain Sensor for Real-Time Monitoring of Human Joint Motion" Micromachines 14, no. 12: 2250. https://doi.org/10.3390/mi14122250
APA StyleYang, M., Liu, Y., Yang, W., & Liu, J. (2023). Thread-Embedded-in-PDMS Wearable Strain Sensor for Real-Time Monitoring of Human Joint Motion. Micromachines, 14(12), 2250. https://doi.org/10.3390/mi14122250