
Structural Design and Experimental Studies of Resonant Fiber Optic Scanner Driven by Co-Fired Multilayer Piezoelectric Ceramics



Abstract
:
1. Introduction
2. Structure Design and Working Principle
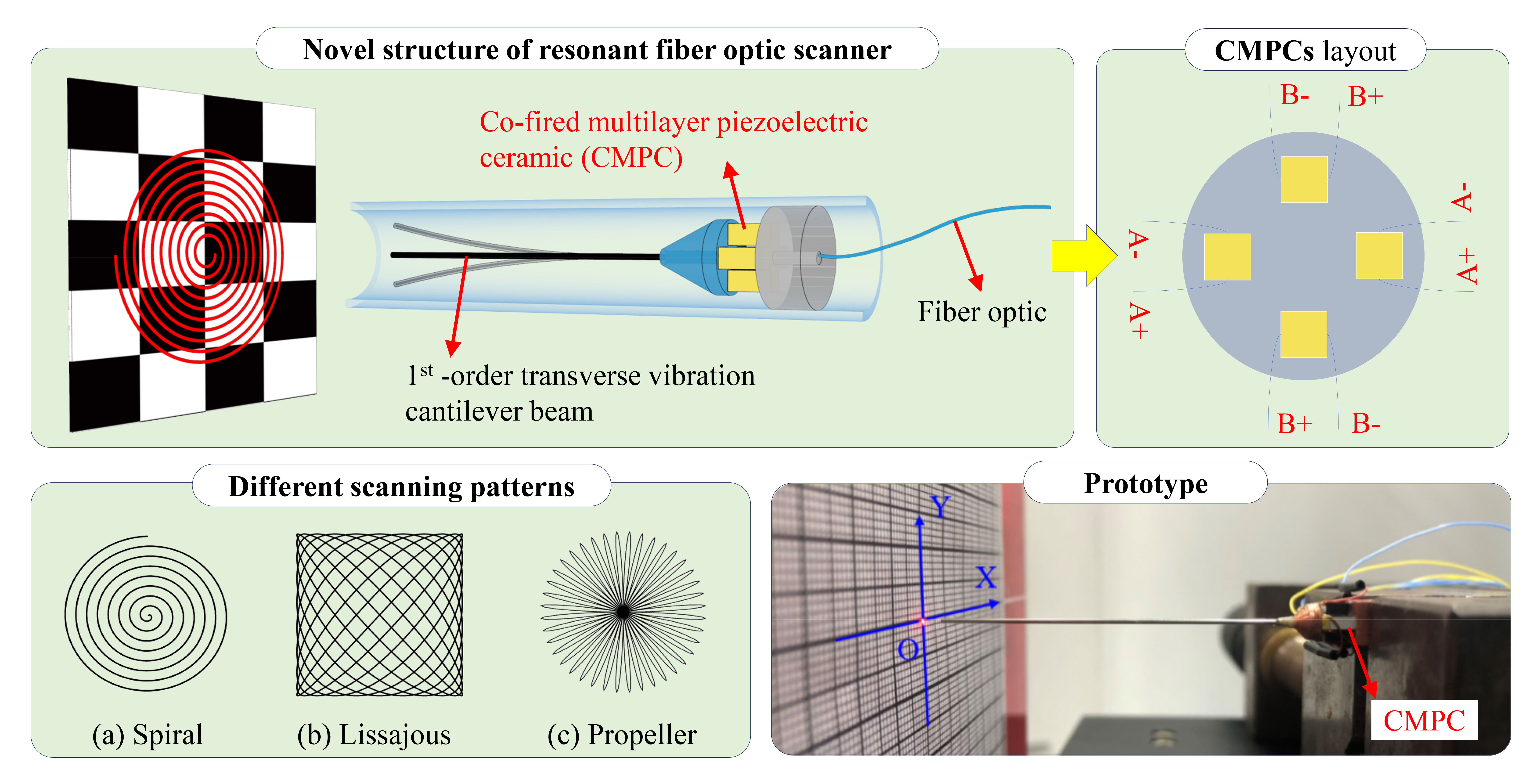
2.1. Structure Design
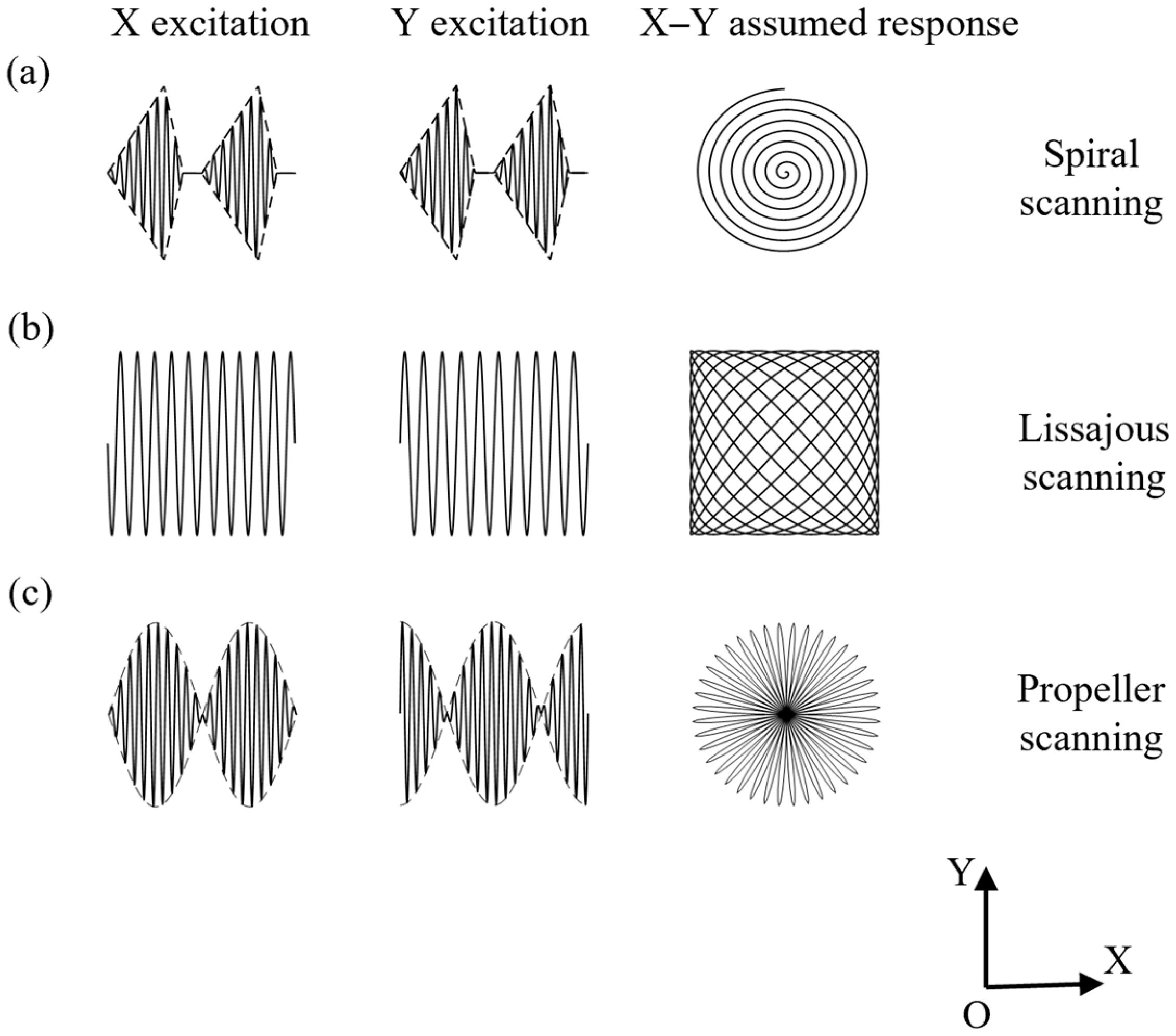
2.2. Driving Principle of Scanner
3. Dynamics Model and Solutions
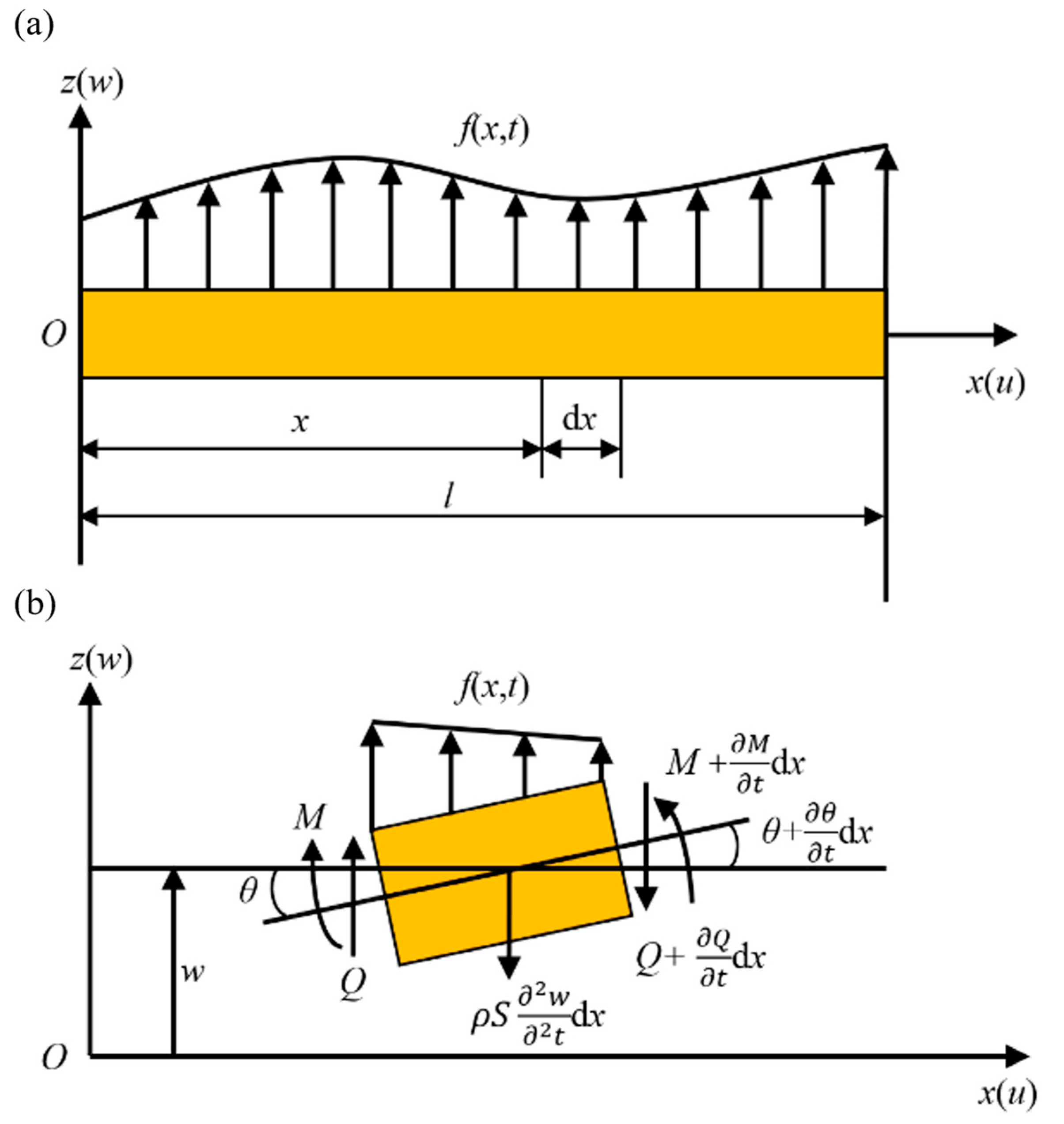
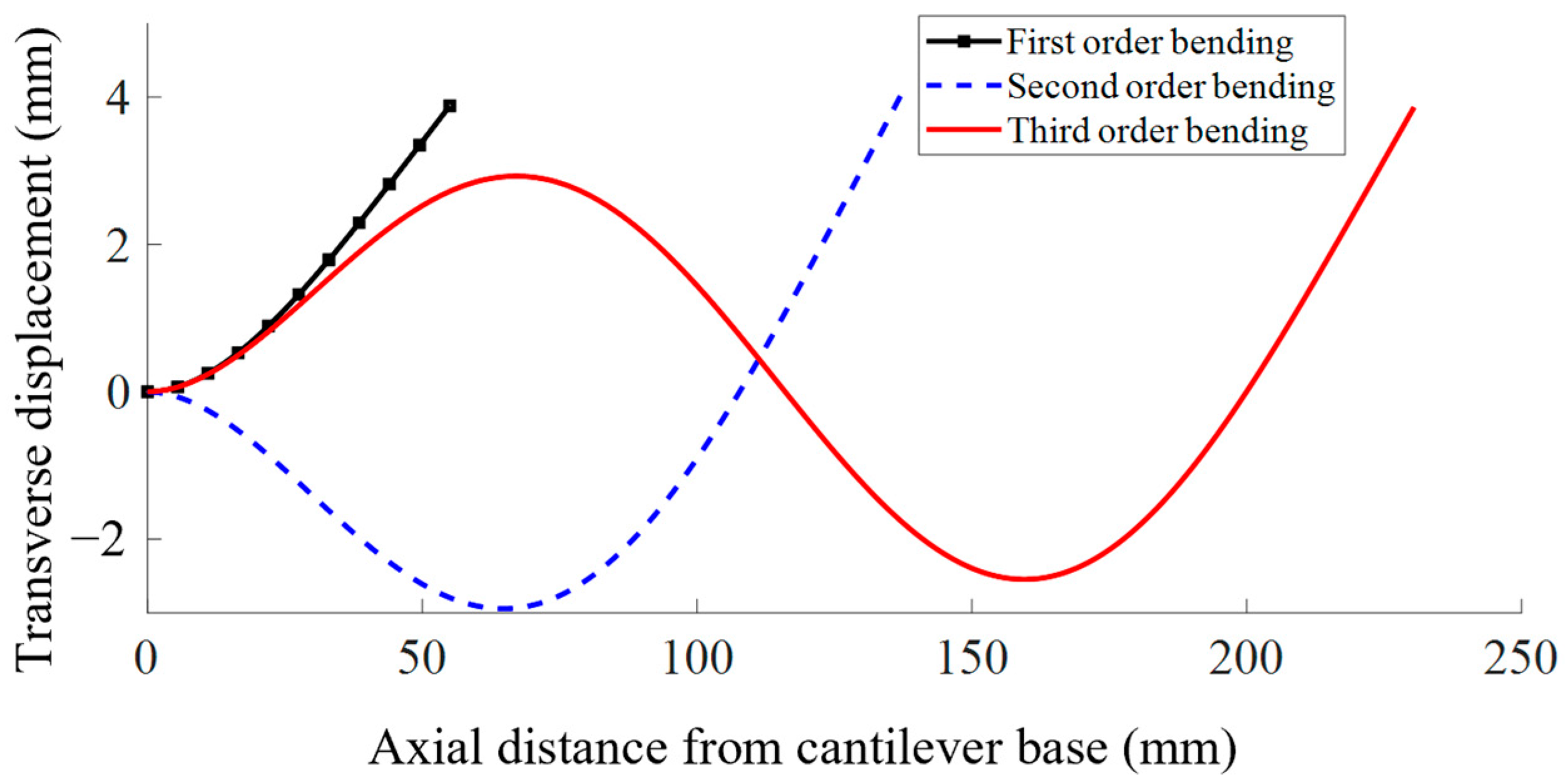
3.1. Linear Model of Free Vibration of Cantilever Beam
3.2. Linear Model of Free Vibration of Cantilever Beam with Damping
4. Finite Element Simulation of Scanning System
4.1. Finite Element Simulation of Scanner
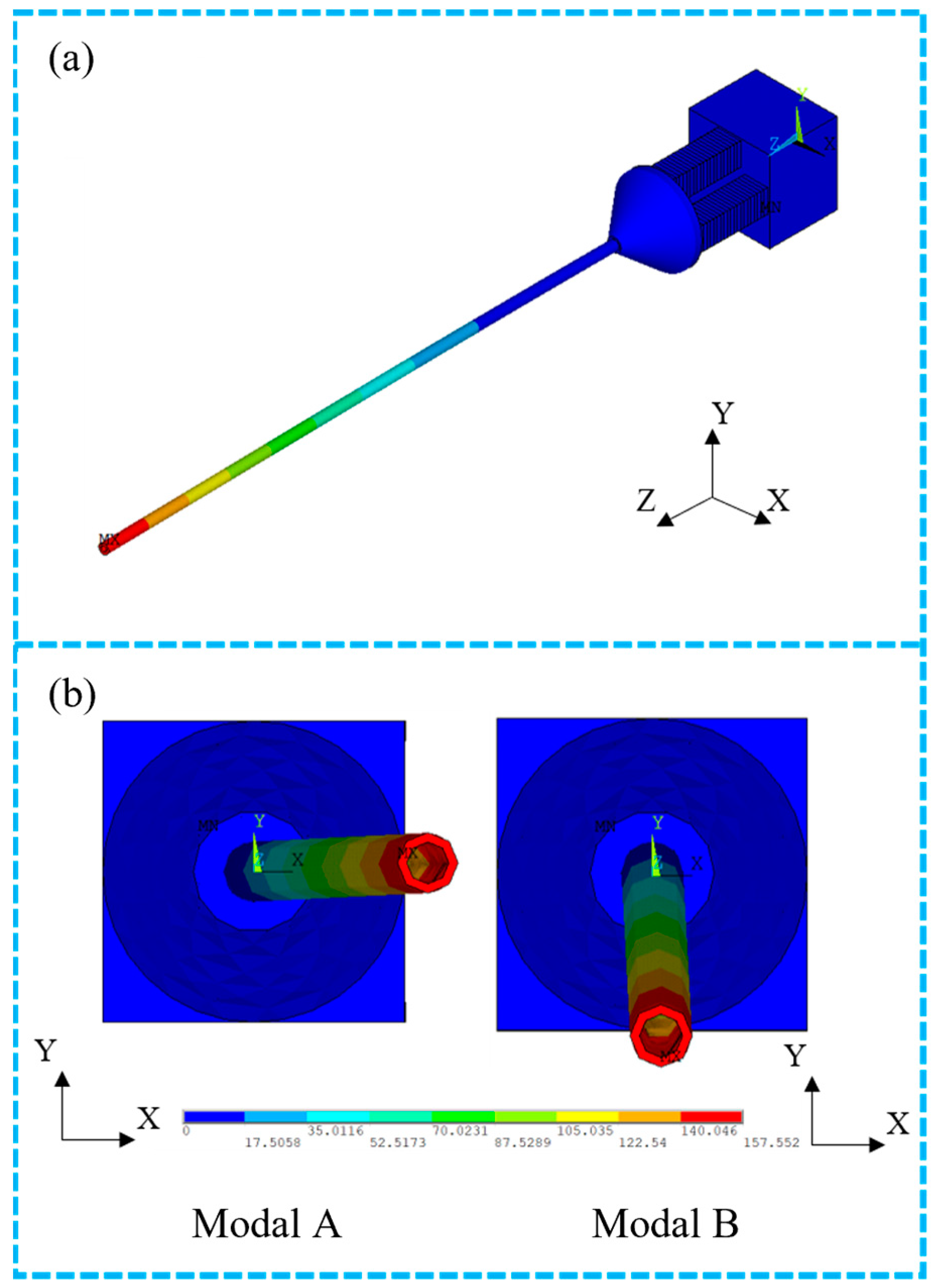
4.2. Modal Analysis
4.3. Transient Dynamic Analysis
5. Experimental Testing
5.1. Scanner Dynamics Test
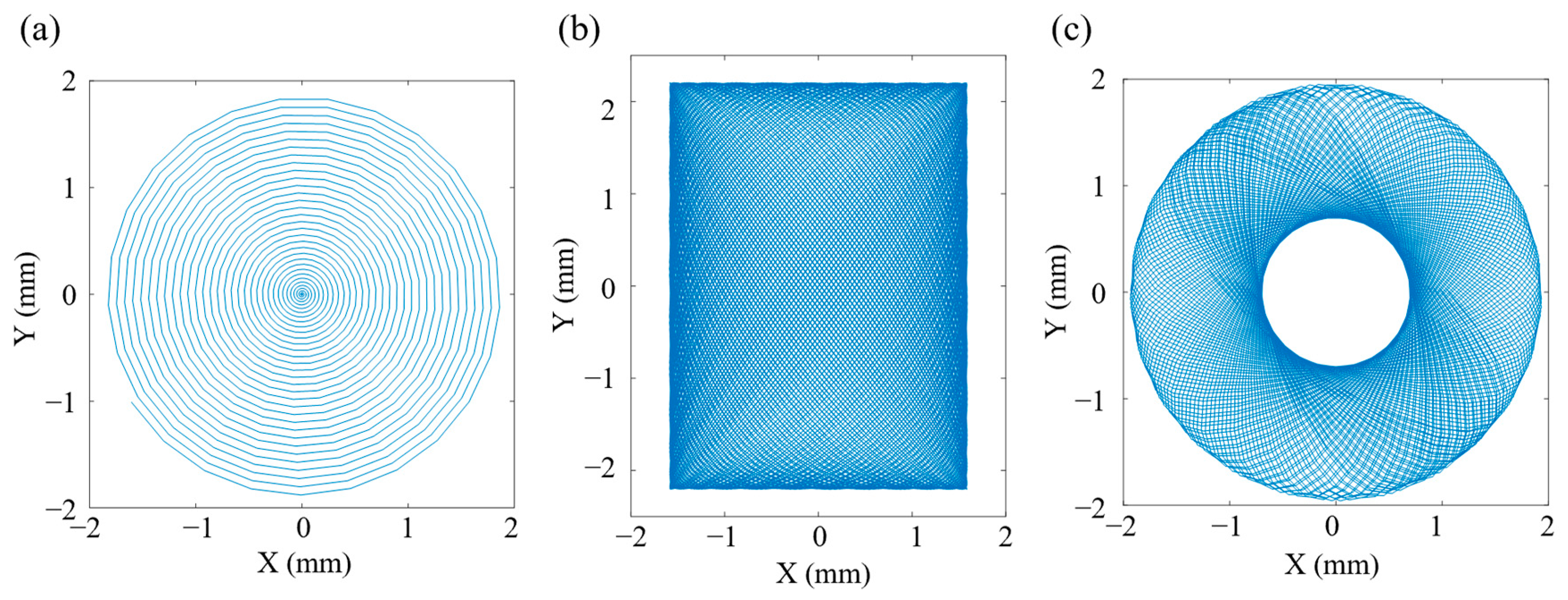
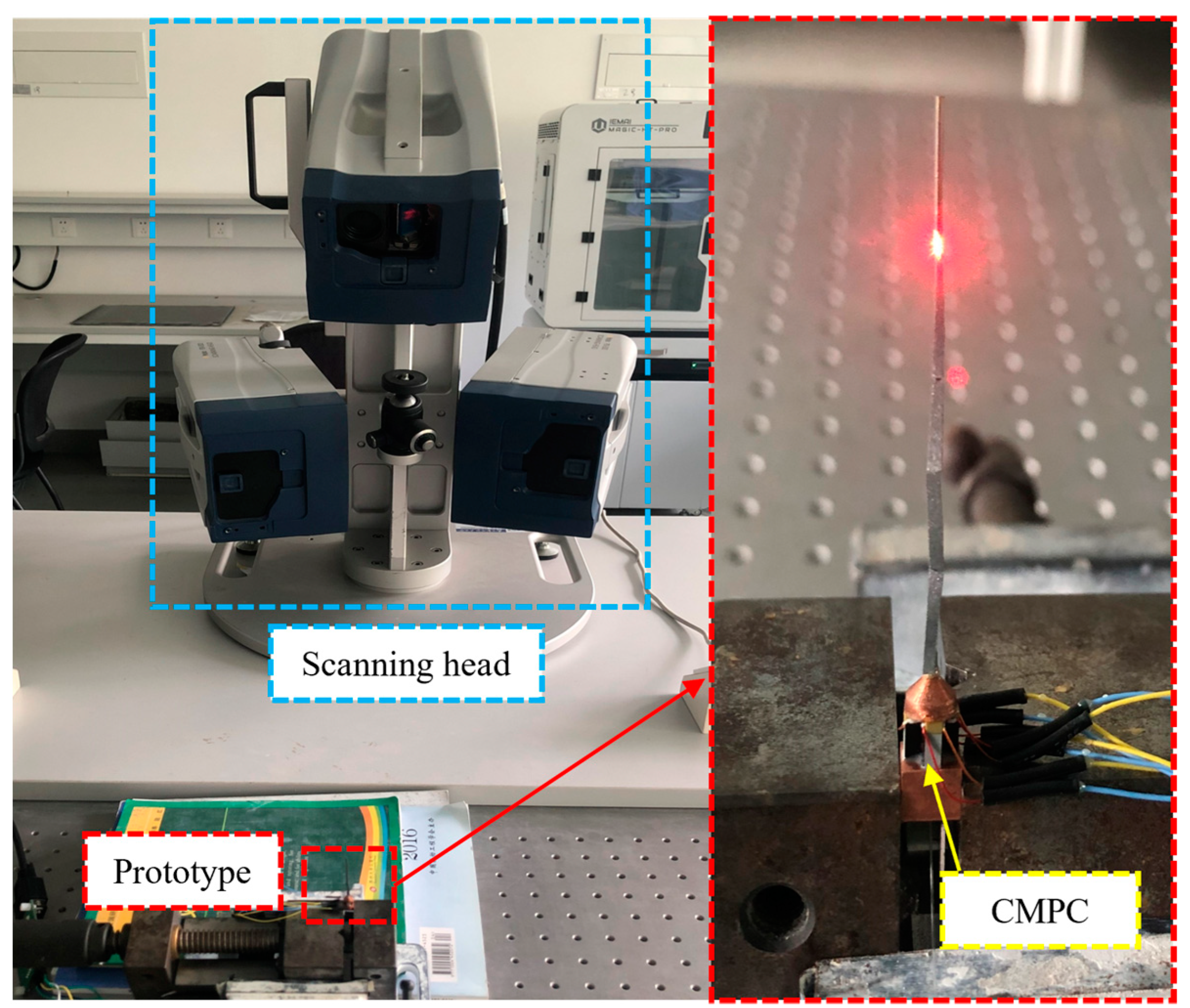
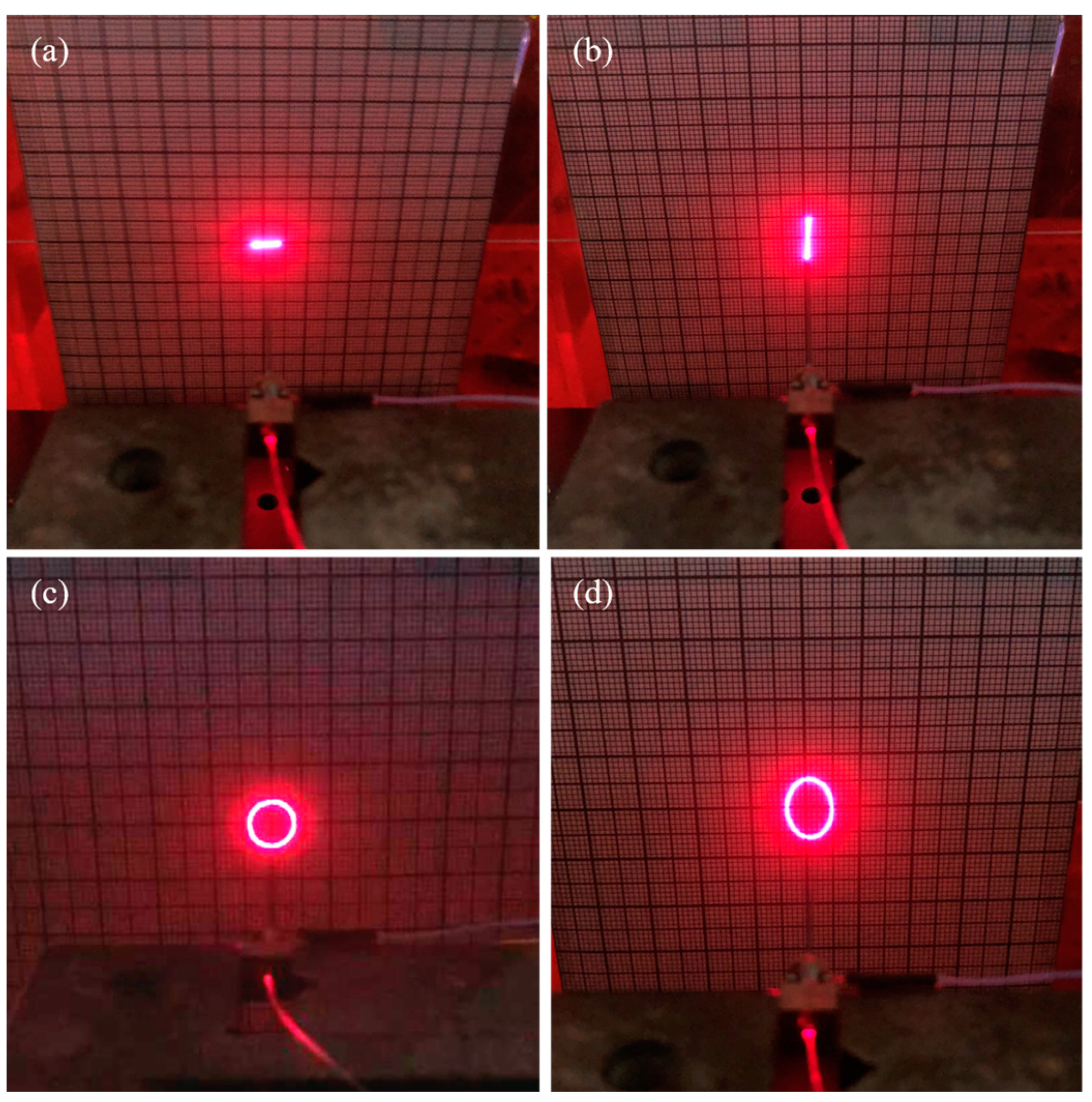
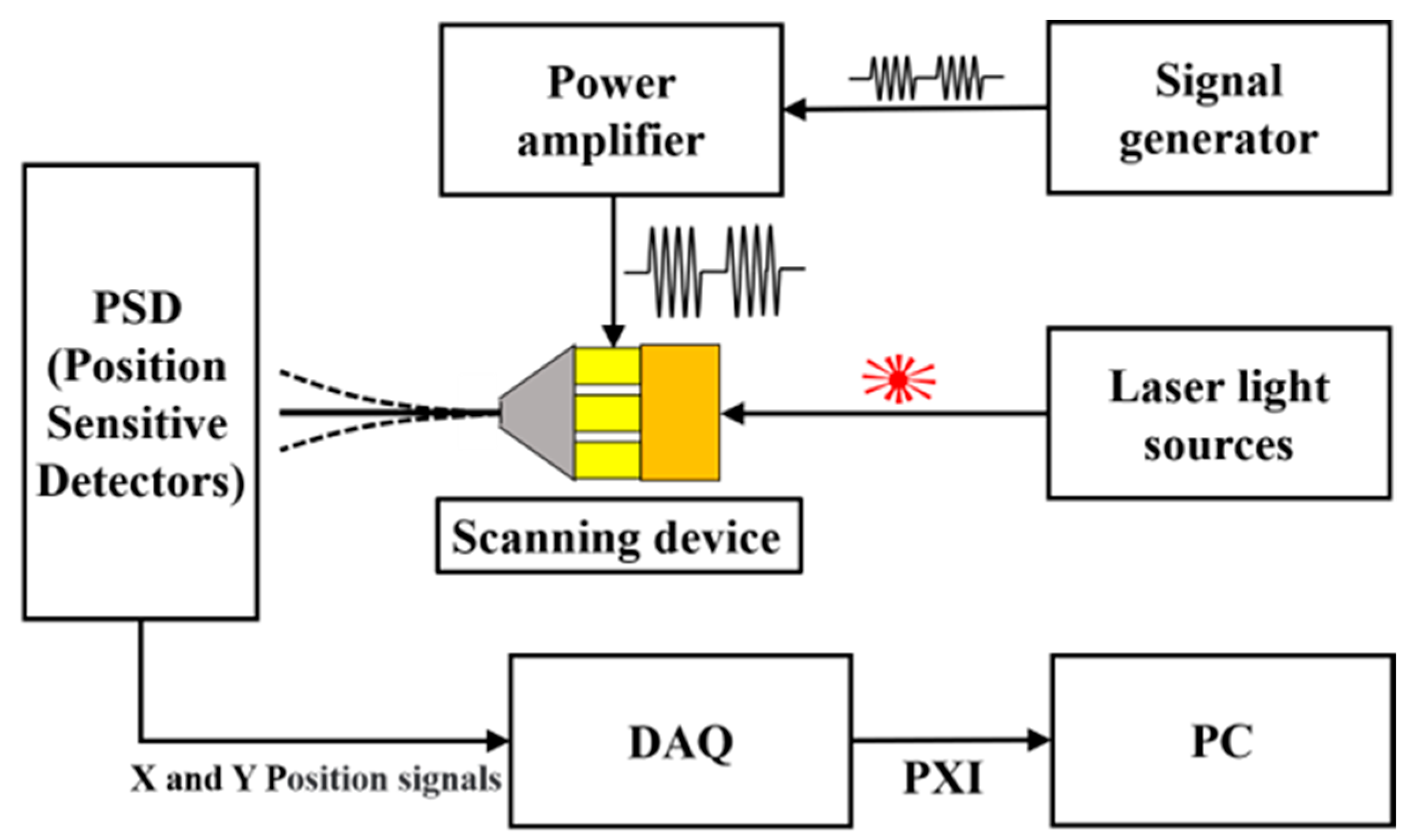
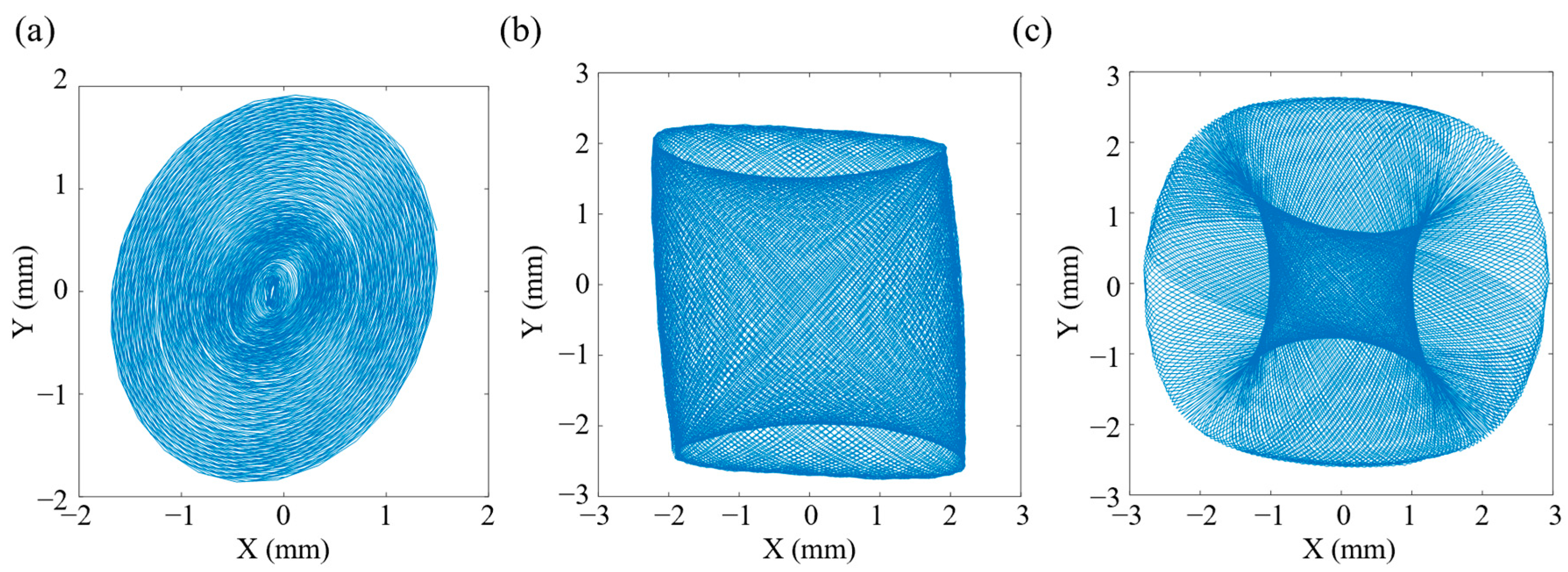
5.2. Laser Scanning Experiments
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Seetohul, V.; Chen, R.; Zhang, Z.; Qian, M.; Shi, Z.; Yang, G.; Mu, P.; Wang, C.; Huang, Z.; et al. Development of a Mechanical Scanning Device With High-Frequency Ultrasound Transducer for Ultrasonic Capsule Endoscopy. IEEE Trans. Med. Imaging 2017, 36, 1922–1929. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.M.; Engelbrecht, C.J.; Soper, T.D.; Helmchen, F.; Seibel, E.J. Scanning Fiber Endoscopy with Highly Flexible, 1 Mm Catheterscopes for Wide-Field, Full-Color Imaging. J. Biophotonics 2010, 3, 385–407. [Google Scholar] [CrossRef] [Green Version]
- Raphael, D.T.; Li, X.; Park, J.; Chen, R.; Chabok, H.; Barukh, A.; Zhou, Q.; Elgazery, M.; Kirk Shung, K. 20 MHz Forward-Imaging Single-Element Beam Steering with an Internal Rotating Variable-Angle Reflecting Surface: Wire Phantom and Ex Vivo Pilot Study. Ultrasonics 2013, 53, 561–569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, L.; Wang, B.; Wen, Z.; Li, X.; Wu, D. 3-D High Frequency Ultrasound Imaging by Piezo-Driving a Single-Element Transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 1932–1942. [Google Scholar] [CrossRef] [PubMed]
- Dong, Z.; Li, S.; Lowerison, M.R.; Pan, J.; Zou, J.; Song, P. Fast Acoustic Steering Via Tilting Electromechanical Reflectors (FASTER): A Novel Method for High Volume Rate 3-D Ultrasound Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 675–687. [Google Scholar] [CrossRef]
- Wu, X.; Chen, S.; Shi, B.; Chen, W.; Xiong, X. High-Powered Voice Coil Actuator for Fast Steering Mirror. Opt. Eng. 2011, 50, 023002. [Google Scholar] [CrossRef]
- Wu, X.; Chen, S.; Chen, W.; Yang, M.; Fu, W. Large Angle and High Linearity Two-Dimensional Laser Scanner Based on Voice Coil Actuators. Rev. Sci. Instrum. 2011, 82, 105103. [Google Scholar] [CrossRef]
- Sunithamani, S.; Lakshmi, P.; Senbagavalli, S. Modelling and Analysis of MEMS Bimorph Piezoelectric Energy Harvester for Green Energy Source. J. Chem. Pharm. Sci. 2015, 7, 258–262. [Google Scholar]
- Moheimani, S.O.R. Invited Review Article: Accurate and Fast Nanopositioning with Piezoelectric Tube Scanners: Emerging Trends and Future Challenges. Rev. Sci. Instrum. 2008, 79, 071101. [Google Scholar] [CrossRef] [Green Version]
- Delibas, B.; Koc, B.; Thielager, J.; Stiebel, C. A novel drive and control method for piezoelectric motors in microscopy stages. In Proceedings of the Euspen’s 21st International Conference & Exhibition, Copenhagen, Denmark, 7–10 June 2021. [Google Scholar]
- Fleming, A.J.; Yong, Y.K. An Ultrathin Monolithic XY Nanopositioning Stage Constructed From a Single Sheet of Piezoelectric Material. IEEE ASME Trans. Mechatron. 2017, 22, 2611–2618. [Google Scholar] [CrossRef]
- Wang, G.; Yan, Y.; Ma, J.; Cui, J. Design, Test and Control of a Compact Piezoelectric Scanner Based on a Compound Compliant Amplification Mechanism. Mech. Mach. Theory 2019, 139, 460–475. [Google Scholar] [CrossRef]
- Meinel, K.; Stoeckel, C.; Melzer, M.; Zimmermann, S.; Forke, R.; Hiller, K.; Otto, T. Piezoelectric Scanning Micromirror With Built-In Sensors Based on Thin Film Aluminum Nitride. IEEE Sens. J. 2021, 21, 9682–9689. [Google Scholar] [CrossRef]
- Eslami, B.; Solares, S.D. Experimental Approach for Selecting the Excitation Frequency for Maximum Compositional Contrast in Viscous Environments for Piezo-Driven Bimodal Atomic Force Microscopy. J. Appl. Phys. 2016, 119, 084901. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, S.; Xu, L.; Zeng, Y. A New Precise Positioning Method for Piezoelectric Scanner of AFM. Ultramicroscopy 2019, 196, 67–73. [Google Scholar] [CrossRef] [PubMed]
- Yeoh, I.L.; Reinhall, P.G.; Berg, M.C.; Seibel, E.J. Self-Contained Image Recalibration in a Scanning Fiber Endoscope Using Piezoelectric Sensing. J. Med. Devices 2015, 9, 011004. [Google Scholar] [CrossRef]
- Rajiv, A.; Zhou, Y.; Ridge, J.; Reinhall, P.; Seibel, E. Electromechanical Model-Based Design and Testing of Fiber Scanners for Endoscopy. J. Med. Devices 2018, 12, 041003. [Google Scholar] [CrossRef]
- Belykh, E.; Miller, E.J.; Hu, D.; Martirosyan, N.L.; Woolf, E.C.; Scheck, A.C.; Byvaltsev, V.A.; Nakaji, P.; Nelson, L.Y.; Seibel, E.J.; et al. Scanning Fiber Endoscope Improves Detection of 5-Aminolevulinic Acid-Induced Protoporphyrin IX Fluorescence at the Boundary of Infiltrative Glioma. World Neurosurg. 2018, 113, e51–e69. [Google Scholar] [CrossRef]
- Kaur, M.; Lane, P.M.; Menon, C. Scanning and Actuation Techniques for Cantilever-Based Fiber Optic Endoscopic Scanners—A Review. Sensors 2021, 21, 251. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Liang, X.; Fu, L. Four-Plate Piezoelectric Actuator Driving a Large-Diameter Special Optical Fiber for Nonlinear Optical Microendoscopy. Opt. Express 2016, 24, 19949–19960. [Google Scholar] [CrossRef]
- Rivera, D.R.; Brown, C.M.; Ouzounov, D.G.; Pavlova, I.; Kobat, D.; Webb, W.W.; Xu, C. Compact and Flexible Raster Scanning Multiphoton Endoscope Capable of Imaging Unstained Tissue. Proc. Natl. Acad. Sci. USA 2011, 108, 17598–17603. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Yan, Y.; Carazo, A.V.; Dong, S.; Priya, S. Low-Temperature Co-Fired Unipoled Multilayer Piezoelectric Transformers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 513–519. [Google Scholar] [CrossRef] [PubMed]
- Ryndzionek, R.; Sienkiewicz, Ł. A Review of Recent Advances in the Single- and Multi-Degree-of-Freedom Ultrasonic Piezoelectric Motors. Ultrasonics 2021, 116, 106471. [Google Scholar] [CrossRef] [PubMed]
- SQUIGGLE RV Micro Motor Technology—New Scale Technologies. Available online: https://www.newscaletech.com/resources/technology/squiggle-rv-reduced-voltage-linear-micro-motor-piezo-motor/ (accessed on 16 February 2023).
- Bar-Cohen, Y.; Sherrit, S.; Bao, X.; Badescu, M.; Lee, H.J.; Walkemeyer, P.; Lih, S.-S. Actuators Using Piezoelectric Stacks and Displacement Enhancers. In Industrial and Commercial Applications of Smart Structures Technologies 2015; SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring: San Diego, CA, USA, 2015; Volume 9433, p. 943302. [Google Scholar] [CrossRef]
- Wen, Z.; Li, X.; Cao, T.; Wang, B.; Liu, R.; Wu, D. A Low-Voltage Cylindrical Traveling Wave Ultrasonic Motor Incorporating Multilayered Piezoelectric Ceramics. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 2129–2136. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C. Ultrasonic Motors: Technologies and Applications; Science Press: Beijing, China; Springer: Heidelberg, Germany, 2011. [Google Scholar]
- Elishakoff, I.; Kaplunov, J.; Nolde, E. Celebrating the Centenary of Timoshenko’s Study of Effects of Shear Deformation and Rotary Inertia. Appl. Mech. Rev. 2015, 67, 060802. [Google Scholar] [CrossRef]
- Cao, T.; Li, X.; Wang, B.; Mi, Y.; Zhao, G.; Twiefel, J.; Wu, D. Viscoelastic Analytical Model and Design of Polymer-Based Bimodal Piezoelectric Motor. Mech. Syst. Signal Process. 2020, 145, 106960. [Google Scholar] [CrossRef]
- Domagalski, Ł.; Świątek, M.; Jędrysiak, J. An Analytical-Numerical Approach to Vibration Analysis of Periodic Timoshenko Beams. Compos. Struct. 2019, 211, 490–501. [Google Scholar] [CrossRef]
- Yang, Y.T.; Heh, D.; Wei, P.K.; Fann, W.S.; Gray, M.H.; Hsu, J.W.P. Vibration DynamicsW of Tapered Optical Fiber Probes. J. Appl. Phys. 1997, 81, 1623–1627. [Google Scholar] [CrossRef] [Green Version]
- Davis, J.R. Stainless Steels; ASM International: Almere, The Netherlands, 1994; pp. 10–11. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | QSN | Stainless Steel | PZT-5H |
|---|---|---|---|
| Young’s modulus (Gpa) | 110 | 200 | |
| Piezoelectric matrix (C/N) | / | / | |
| Poisson’ ratio | 0.34 | 0.3 | / |
| Density (kg/m3) | 8.78 × 103 | 7.93 × 103 | 7.50 × 103 |
| Modal | Theoretically Calculated (Hz) | FEA Calculated (Hz) | Experimentally Measured (Hz) |
|---|---|---|---|
| Modal A | 199.79 | 197.64 | 200 |
| Modal B | 199.79 | 197.87 | 200 |
| Parameters | Piezo Tube Scanner [4] | This Prototype |
|---|---|---|
| Piezoelectric actuator size (mm) | Φ7 × 35 | 5 × 5 × 13 |
| Driving voltage (Vp-p) | 500 | 50 |
| Working frequency (Hz) | 112 | 200 |
| Amplitude in air (mm) | 15 | 10 |
| Amplitude in water (mm) | 2 | 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Wen, Z.; Wang, B.; Li, X.; Wu, D. Structural Design and Experimental Studies of Resonant Fiber Optic Scanner Driven by Co-Fired Multilayer Piezoelectric Ceramics. Micromachines 2023, 14, 517. https://doi.org/10.3390/mi14030517
He L, Wen Z, Wang B, Li X, Wu D. Structural Design and Experimental Studies of Resonant Fiber Optic Scanner Driven by Co-Fired Multilayer Piezoelectric Ceramics. Micromachines. 2023; 14(3):517. https://doi.org/10.3390/mi14030517
Chicago/Turabian StyleHe, Liyuan, Zhiyi Wen, Boquan Wang, Xiaoniu Li, and Dawei Wu. 2023. "Structural Design and Experimental Studies of Resonant Fiber Optic Scanner Driven by Co-Fired Multilayer Piezoelectric Ceramics" Micromachines 14, no. 3: 517. https://doi.org/10.3390/mi14030517
APA StyleHe, L., Wen, Z., Wang, B., Li, X., & Wu, D. (2023). Structural Design and Experimental Studies of Resonant Fiber Optic Scanner Driven by Co-Fired Multilayer Piezoelectric Ceramics. Micromachines, 14(3), 517. https://doi.org/10.3390/mi14030517