
Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
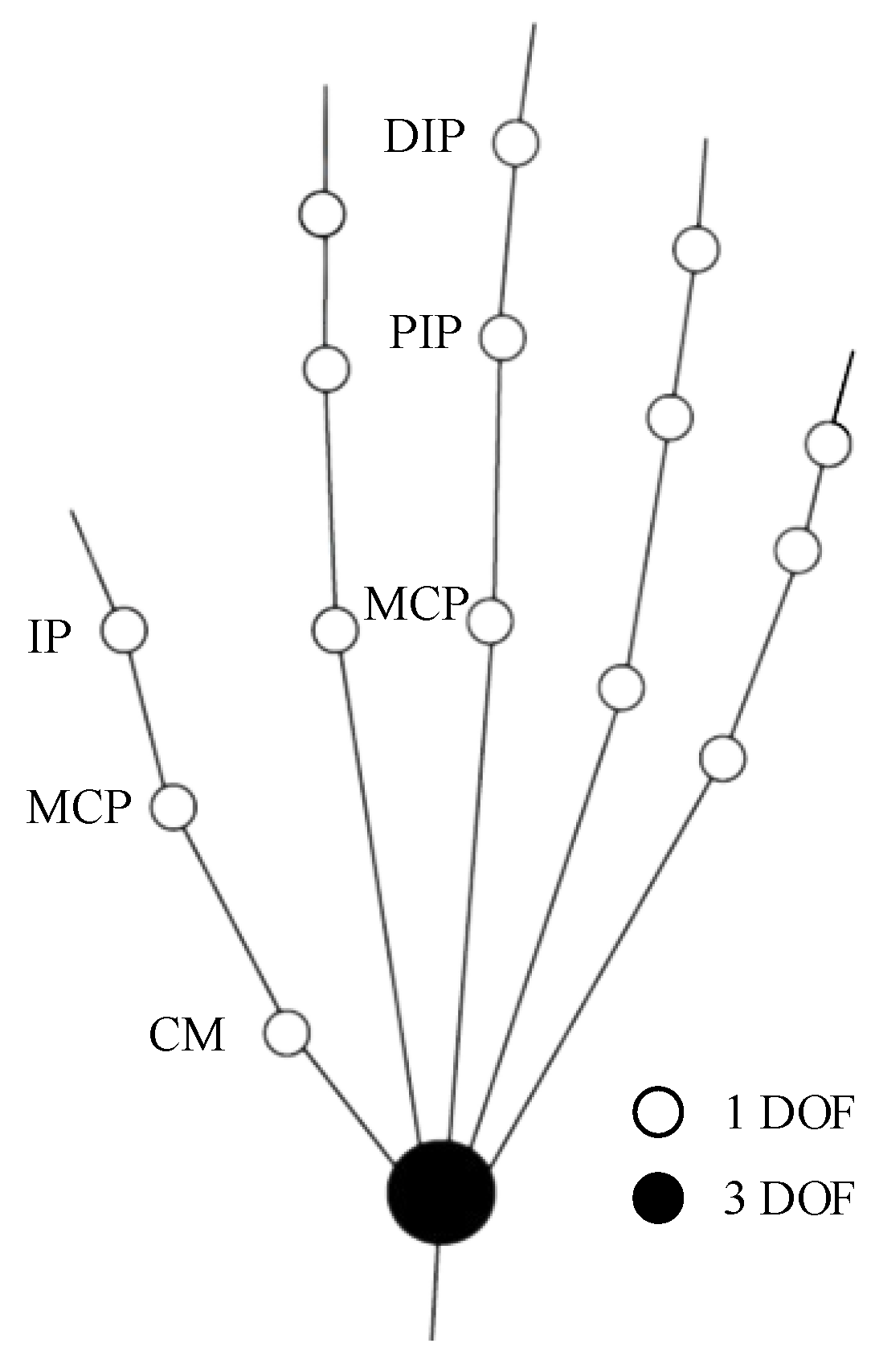
2.1. Analysis of Physiological Structure and Rehabilitation Strategy of Hand
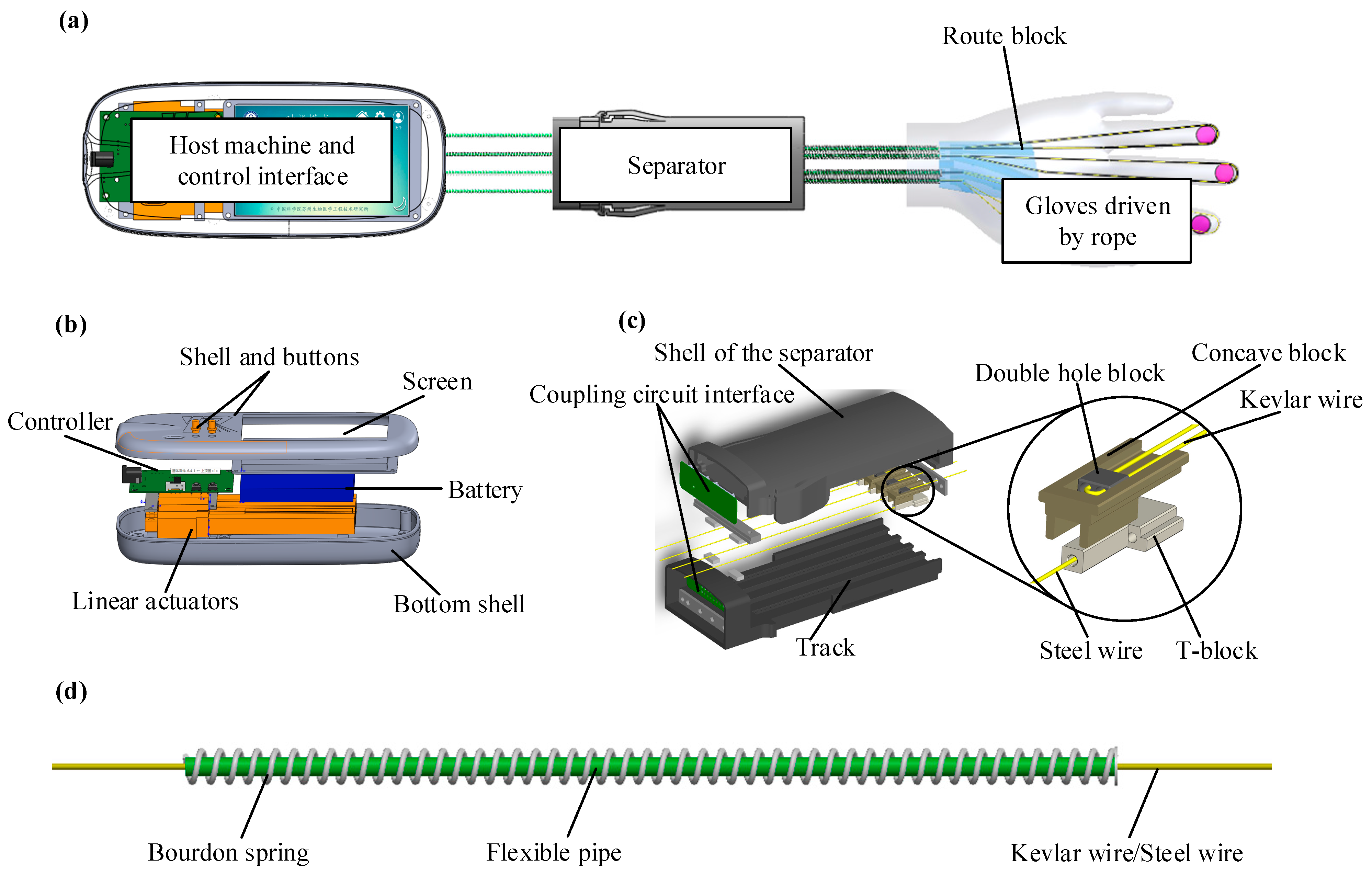
2.2. Structure of Lasso in Hand Functional Rehabilitation Robot
2.3. Simulation and Transmission Characteristics Analysis of Lasso
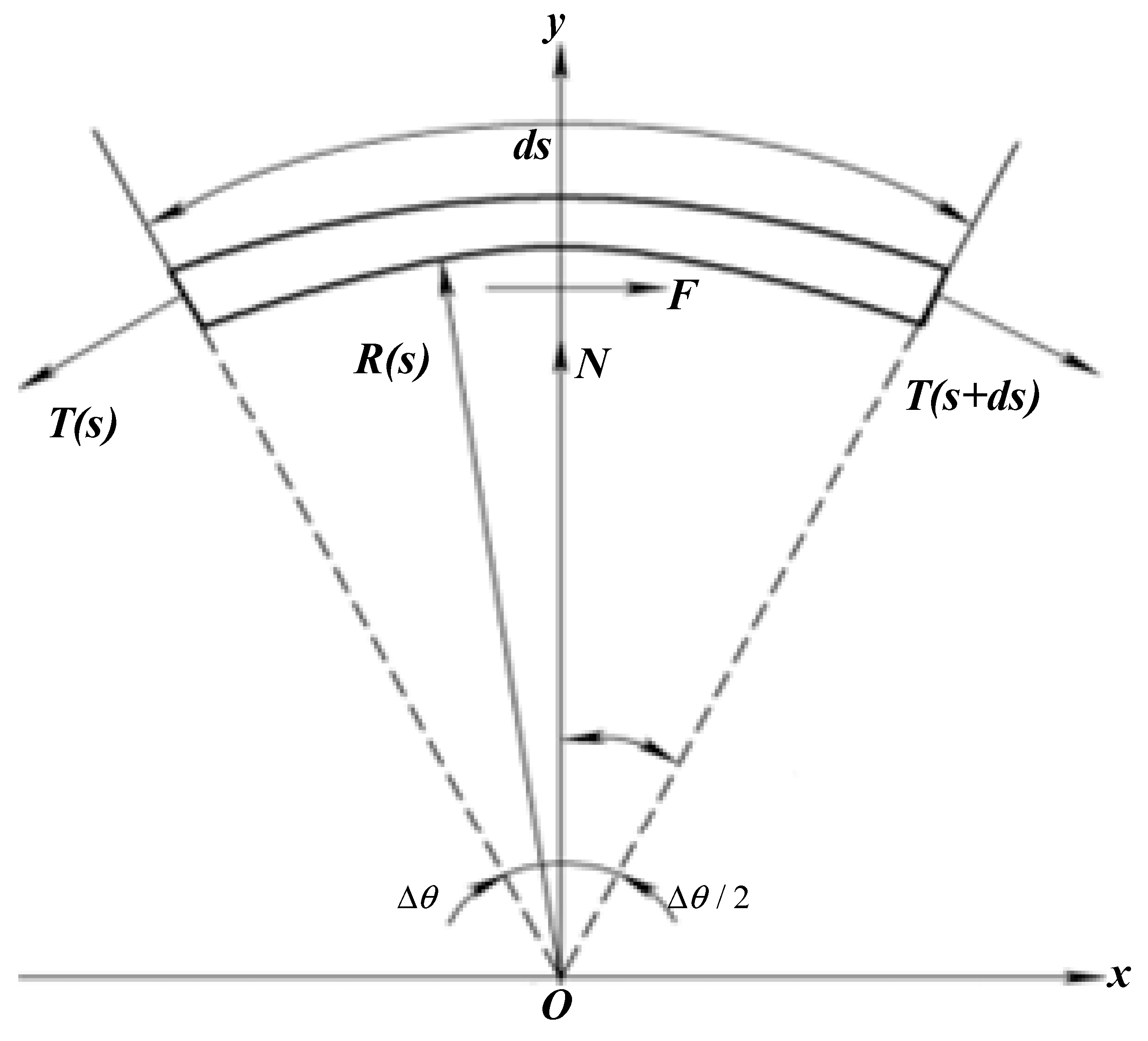
2.3.1. Transmission Characteristics of Lasso Micro-Element
2.3.2. Motion Simulation of Lasso Model
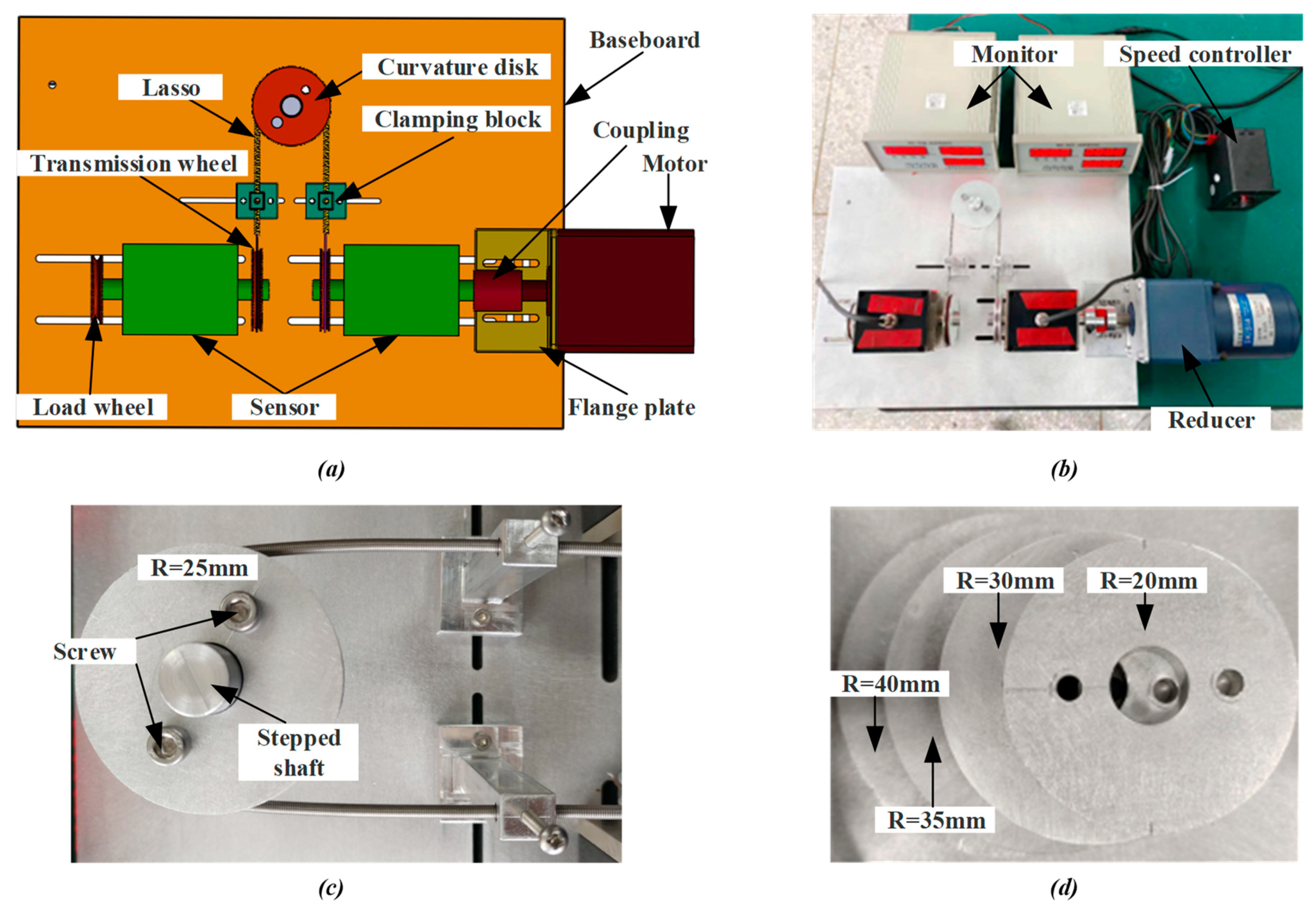
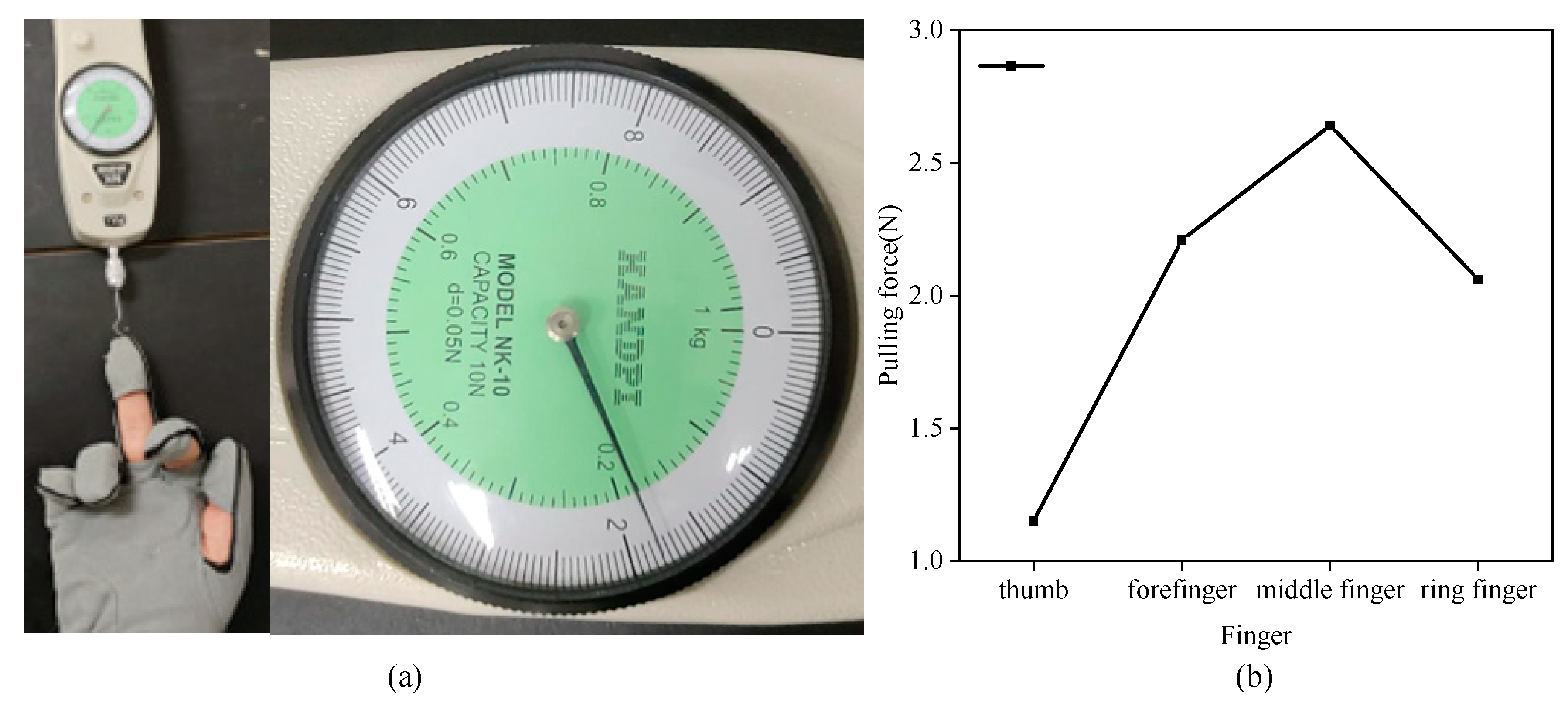
2.4. Lasso Transmission Experiment
3. Result and Discussion
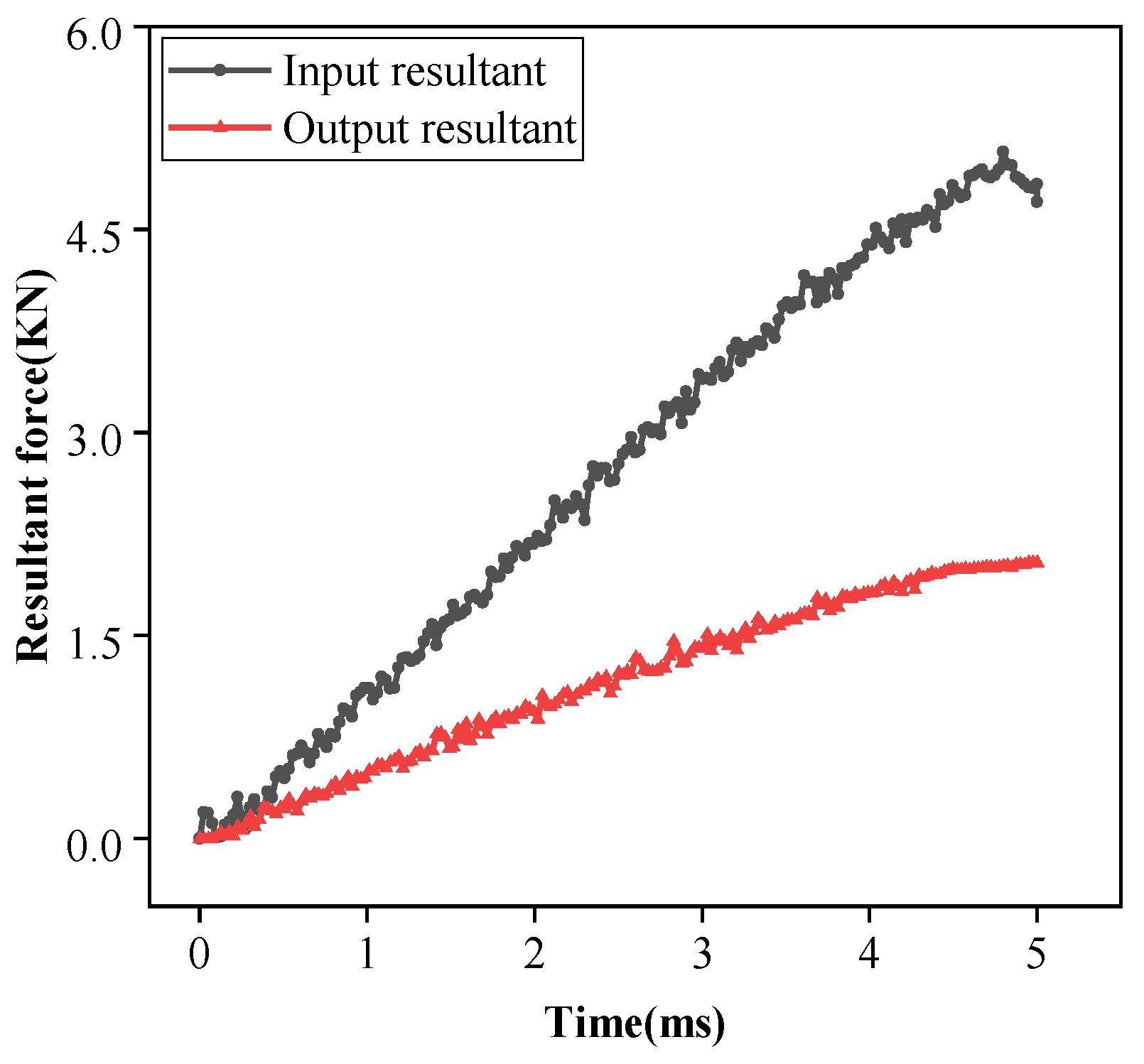
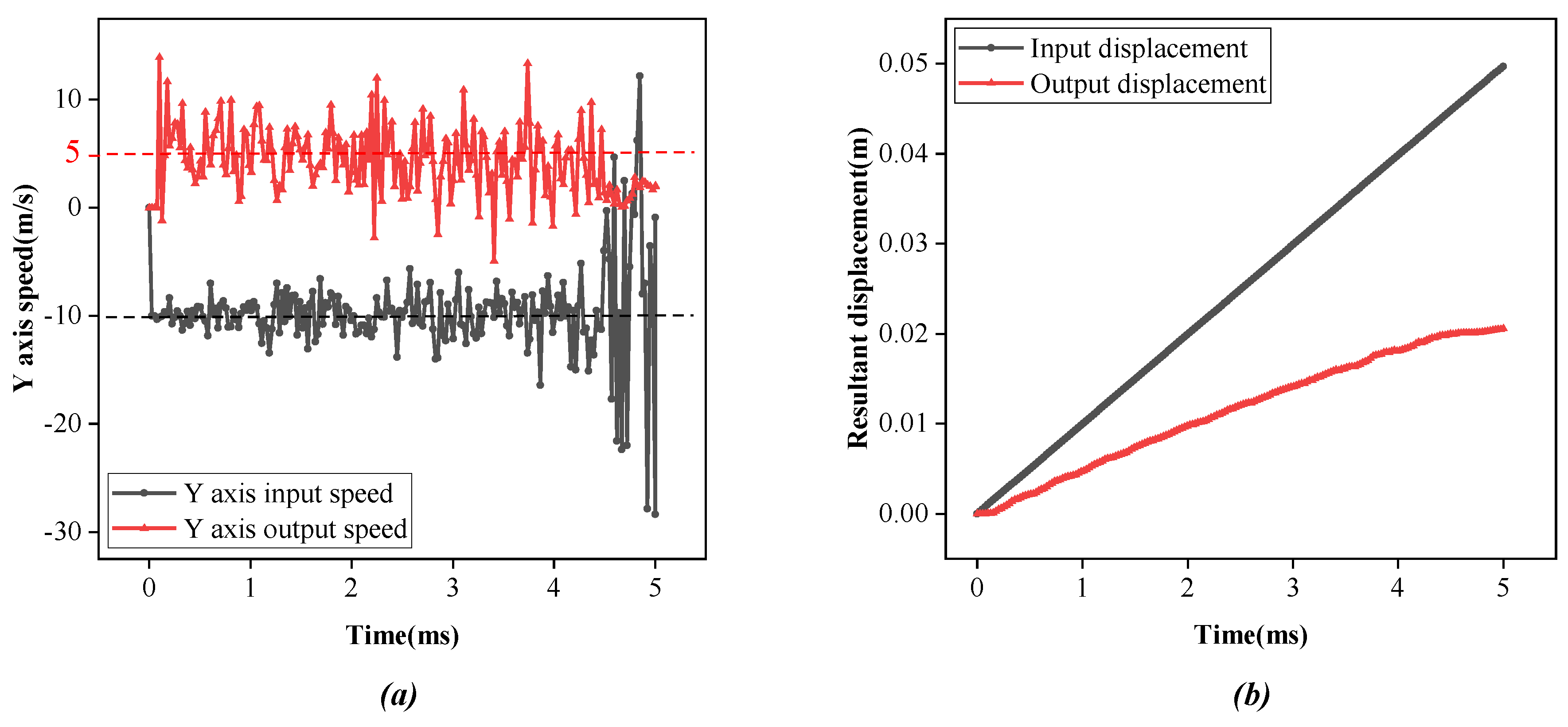
3.1. Simulation Result of Force, Velocity and Displacement of Lasso
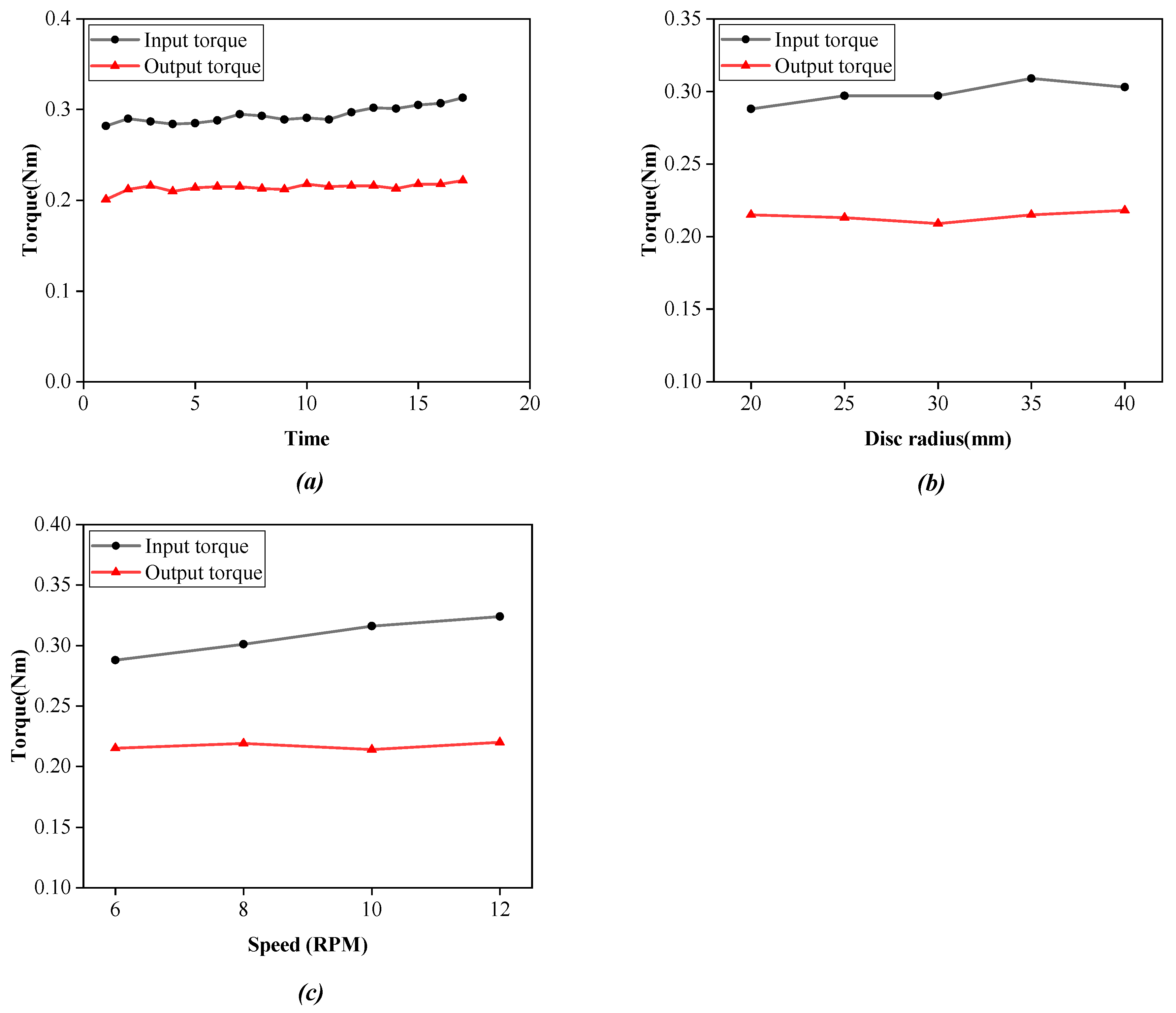
3.2. Result of Experiment
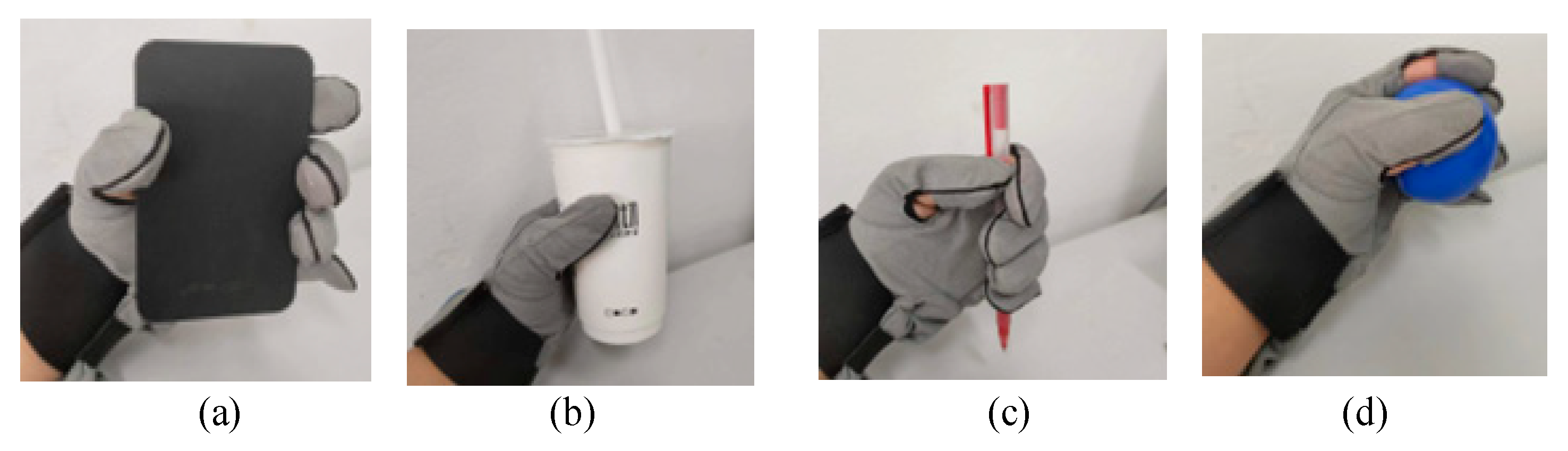
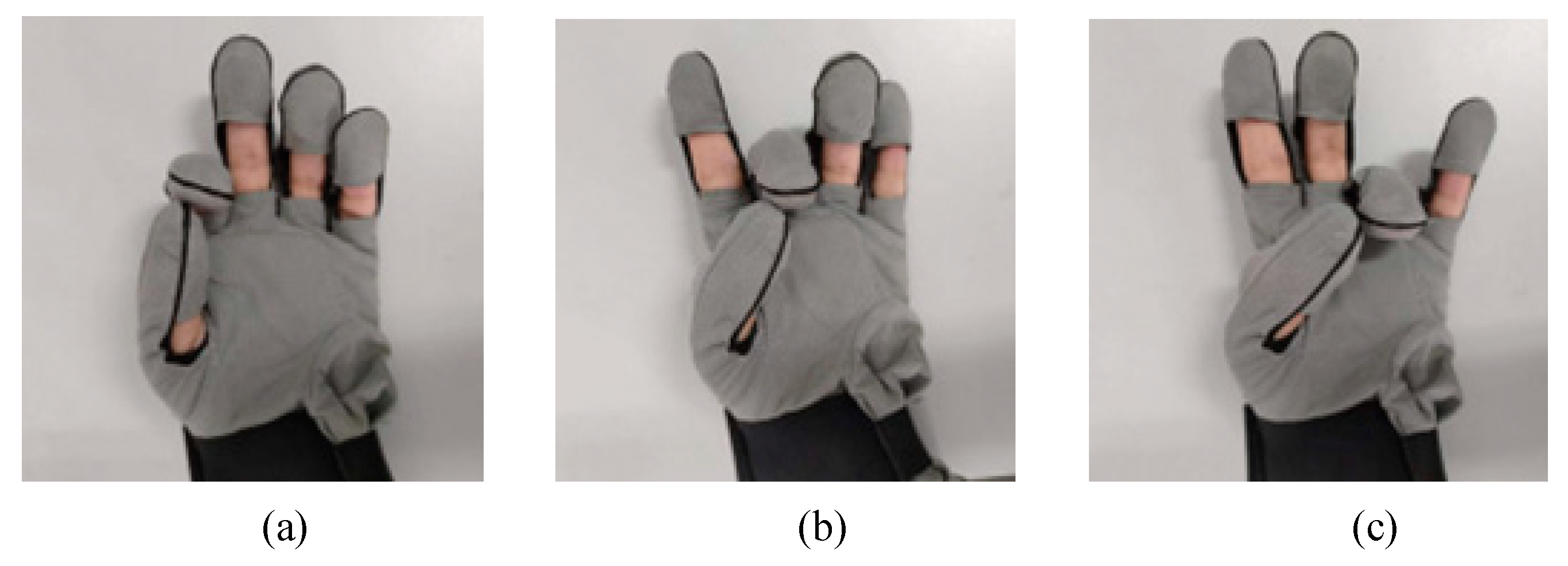
4. Physical Prototype Experiment of Robot
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Katan, M.; Luft, A. Global Burden of Stroke. Semin. Neurol. 2018, 38, 208–211. [Google Scholar] [CrossRef] [Green Version]
- Freburger, J.K.; Li, D.; Johnson, A.M.; Fraher, E.P. Physical and Occupational Therapy From the Acute to Community Setting After Stroke: Predictors of Use, Continuity of Care, and Timeliness of Care. Arch Phys. Med. Rehabil. 2018, 99, 1077–1089.e7. [Google Scholar] [CrossRef] [PubMed]
- Sun, N.; Li, G.; Cheng, L. Design and Validation of a Self-Aligning Index Finger Exoskeleton for Post-Stroke Rehabilitation. IEEE Trans. Neural. Syst. Rehabil. Eng. 2021, 29, 1513–1523. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; He, B.; Liang, Z.; Zhao, C.G.; Chen, J.; Zhuo, Y.; Xu, G.; Xie, J.; Althoefer, K. An Attention-Controlled Hand Exoskeleton for the Rehabilitation of Finger Extension and Flexion Using a Rigid-Soft Combined Mechanism. Front. Neurorobot. 2019, 13, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, L.; Chen, M.; Li, Z. Design and Control of a Wearable Hand Rehabilitation Robot. IEEE Access 2018, 6, 74039–74050. [Google Scholar] [CrossRef]
- Baik, S.; Park, S.; Park, J. Haptic Glove Using Tendon-Driven Soft Robotic Mechanism. Front. Bioeng. Biotechnol. 2020, 8, 541105. [Google Scholar] [CrossRef]
- Cappello, L.; Meyer, J.T.; Galloway, K.C.; Peisner, J.D.; Granberry, R.; Wagner, D.A.; Engelhardt, S.; Paganoni, S.; Walsh, C.J. Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J. Neuroeng. Rehabil. 2018, 15, 59. [Google Scholar] [CrossRef] [PubMed]
- Rudd, G.; Daly, L.; Jovanovic, V.; Cuckov, F. A Low-Cost Soft Robotic Hand Exoskeleton for Use in Therapy of Limited Hand–Motor Function. Appl. Sci. 2019, 9, 3751. [Google Scholar] [CrossRef] [Green Version]
- Popov, D.; Gaponov, I.; Ryu, J.-H. Portable Exoskeleton Glove With Soft Structure for Hand Assistance in Activities of Daily Living. IEEE/ASME Trans. Mechatron. 2017, 22, 865–875. [Google Scholar] [CrossRef]
- Meng, Q.; Shen, Z.; Nie, Z.; Meng, Q.; Wu, Z.; Yu, H. Modeling and Evaluation of a Novel Hybrid-Driven Compliant Hand Exoskeleton Based on Human-Machine Coupling Model. Appl. Sci. 2021, 11, 10825. [Google Scholar] [CrossRef]
- Park, J.; Hwang, I.; Lee, W. Wearable Robotic Glove Design Using Surface-Mounted Actuators. Front. Bioeng. Biotechnol. 2020, 8, 548947. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Li, Z.; Zeng, H.; Wei, N. Control of Newly-Designed Wearable Robotic Hand Exoskeleton Based on Surface Electromyographic Signals. Front. Neurorobot. 2021, 15, 711047. [Google Scholar] [CrossRef]
- Ou, Y.K.; Wang, Y.L.; Chang, H.C.; Chen, C.C. Design and Development of a Wearable Exoskeleton System for Stroke Rehabilitation. Healthcare 2020, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Refour, E.M.; Sebastian, B.; Chauhan, R.J.; Ben-Tzvi, P. A General Purpose Robotic Hand Exoskeleton With Series Elastic Actuation. J. Mech. Robot. 2019, 11, 060102. [Google Scholar] [CrossRef]
- Chowdhury, A.; Nishad, S.S.; Meena, Y.K.; Dutta, A.; Prasad, G. Hand-Exoskeleton Assisted Progressive Neurorehabilitation using Impedance Adaptation based Challenge Level Adjustment Method. IEEE Trans. Haptics 2018, 12, 128–140. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Tong, K.Y.; Shin, H.; Li, S.; Zhou, P. Advanced Myoelectric Control for Robotic Hand-Assisted Training: Outcome from a Stroke Patient. Front. Neurol. 2017, 8, 107. [Google Scholar] [CrossRef] [Green Version]
- Moreno-SanJuan, V.; Cisnal, A.; Fraile, J.-C.; Pérez-Turiel, J.; de-la-Fuente, E. Design and characterization of a lightweight underactuated RACA hand exoskeleton for neurorehabilitation. Robot. Auton. Syst. 2021, 143, 103828. [Google Scholar] [CrossRef]
- Carbone, G.; Gerding, E.C.; Corves, B.; Cafolla, D.; Russo, M.; Ceccarelli, M. Design of a Two-DOFs Driving Mechanism for a Motion-Assisted Finger Exoskeleton. Appl. Sci. 2020, 10, 2619. [Google Scholar] [CrossRef] [Green Version]
- Meng, N.; Kun, W.; Mingxin, L.; Ke, Y.; Zhi, W. Design, analysis and experiment of finger soft actuator with nested structure for rehabilitation training. Adv. Mech. Eng. 2020, 12, 1687814020971538. [Google Scholar] [CrossRef]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.-H. A Fully Fabric-Based Bidirectional Soft Robotic Glove for Assistance and Rehabilitation of Hand Impaired Patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Setiawan, J.D.; Ariyanto, M.; Nugroho, S.; Ismail, R.; Purbayanto, T.; Sihombing, H. Fuzzy Logic Control for a Soft Exoskeleton Glove Using a Motor-Tendon Actuator. Ing. E Investig. 2021, 41. [Google Scholar] [CrossRef]
- Araujo, R.S.; Silva, C.R.; Netto, S.P.N.; Morya, E.; Brasil, F.L. Development of a Low-Cost EEG-Controlled Hand Exoskeleton 3D Printed on Textiles. Front. Neurosci. 2021, 15, 661569. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Wang, K.; Cao, Q.; Fei, F.; Yang, D.; Lu, X.; Xu, B.; Zeng, H.; Song, A. Development of a Low-Cost Wearable Data Glove for Capturing Finger Joint Angles. Micromachines 2021, 12, 771. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Tan, X.; Yan, D.; Zhang, Z.; Gong, Y. A Composite Fabric-Based Soft Rehabilitation Glove With Soft Joint for Dementia in Parkinson’s Disease. IEEE J. Transl. Eng. Health Med. 2020, 8, 1400110. [Google Scholar] [CrossRef]
- Li, H.; Cheng, L. Preliminary study on the design and control of a pneumatically-actuated hand rehabilitation device. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 860–865. [Google Scholar]
- Castiblanco, J.C.; Mondragon, I.F.; Alvarado-Rojas, C.; Colorado, J.D. Assist-As-Needed Exoskeleton for Hand Joint Rehabilitation Based on Muscle Effort Detection. Sensors 2021, 21, 4372. [Google Scholar] [CrossRef] [PubMed]
- Chauhan, R.; Sebastian, B.; Ben-Tzvi, P. Grasp Prediction Toward Naturalistic Exoskeleton Glove Control. IEEE Trans. Hum. Mach. Syst. 2020, 50, 22–31. [Google Scholar] [CrossRef] [PubMed]
- Ivanescu, M.; Popescu, N.; Popescu, D.; Channa, A.; Poboroniuc, M. Exoskeleton Hand Control by Fractional Order Models. Sensors 2019, 19, 4608. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, A.; Raza, H.; Meena, Y.K.; Dutta, A.; Prasad, G. Online Covariate Shift Detection-Based Adaptive Brain–Computer Interface to Trigger Hand Exoskeleton Feedback for Neuro-Rehabilitation. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 1070–1080. [Google Scholar] [CrossRef] [Green Version]
- Marconi, D.; Baldoni, A.; McKinney, Z.; Cempini, M.; Crea, S.; Vitiello, N. A novel hand exoskeleton with series elastic actuation for modulated torque transfer. Mechatronics 2019, 61, 69–82. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Yeow, C.H. Design and Preliminary Feasibility Study of a Soft Robotic Glove for Hand Function Assistance in Stroke Survivors. Front. Neurosci. 2017, 11, 547. [Google Scholar] [CrossRef] [Green Version]
- Cuellar, J.S.; Plettenburg, D.; Zadpoor, A.A.; Breedveld, P.; Smit, G. Design of a 3D-printed hand prosthesis featuring articulated bio-inspired fingers. Proc. Inst. Mech. Eng. H J. Eng. Med. 2021, 235, 336–345. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Zhao, X.; Ma, G.; Tao, B.; Yin, Z. Design of 3D-printed Cable Driven Humanoid Hand Based on Bidirectional Elastomeric Passive Transmission. Chin. J. Mech. Eng. 2021, 34, 76. [Google Scholar] [CrossRef]
- Guo, K.; Orban, M.; Yang, H.; Li, Z. Research on Rope-Driven Flexible Robot for Hand Rehabilitation and Experimental Study Based On EEG Signals. J. Mech. Med. Biol. 2022, 22, 2240043. [Google Scholar] [CrossRef]
- Guo, K.; Lu, J.; Liu, C.; Yang, H. Development, Research, Optimization and Experiment of Exoskeleton Robot for Hand Rehabilitation Training. Appl. Sci. 2022, 12, 10580. [Google Scholar] [CrossRef]
- Liu, C.; Li, J.; Zhang, S.; Yang, H.; Guo, K. Study on Flexible sEMG Acquisition System and Its Application in Muscle Strength Evaluation and Hand Rehabilitation. Micromachines 2023, 13, 2047. [Google Scholar] [CrossRef] [PubMed]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Guo, K.; Yang, H. Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot. Micromachines 2023, 14, 858. https://doi.org/10.3390/mi14040858
Lu J, Guo K, Yang H. Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot. Micromachines. 2023; 14(4):858. https://doi.org/10.3390/mi14040858
Chicago/Turabian StyleLu, Jingxin, Kai Guo, and Hongbo Yang. 2023. "Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot" Micromachines 14, no. 4: 858. https://doi.org/10.3390/mi14040858