
A Wafer Pre-Alignment Algorithm Based on Weighted Fourier Series Fitting of Circles and Least Squares Fitting of Circles

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Circle Fitting Method
2.1. Fitting the Center of the Wafer by WFC
2.2. Fitting the Arc of the Wafer by LSC
2.3. Pre-Alignment Algorithm
3. Simulation Analysis
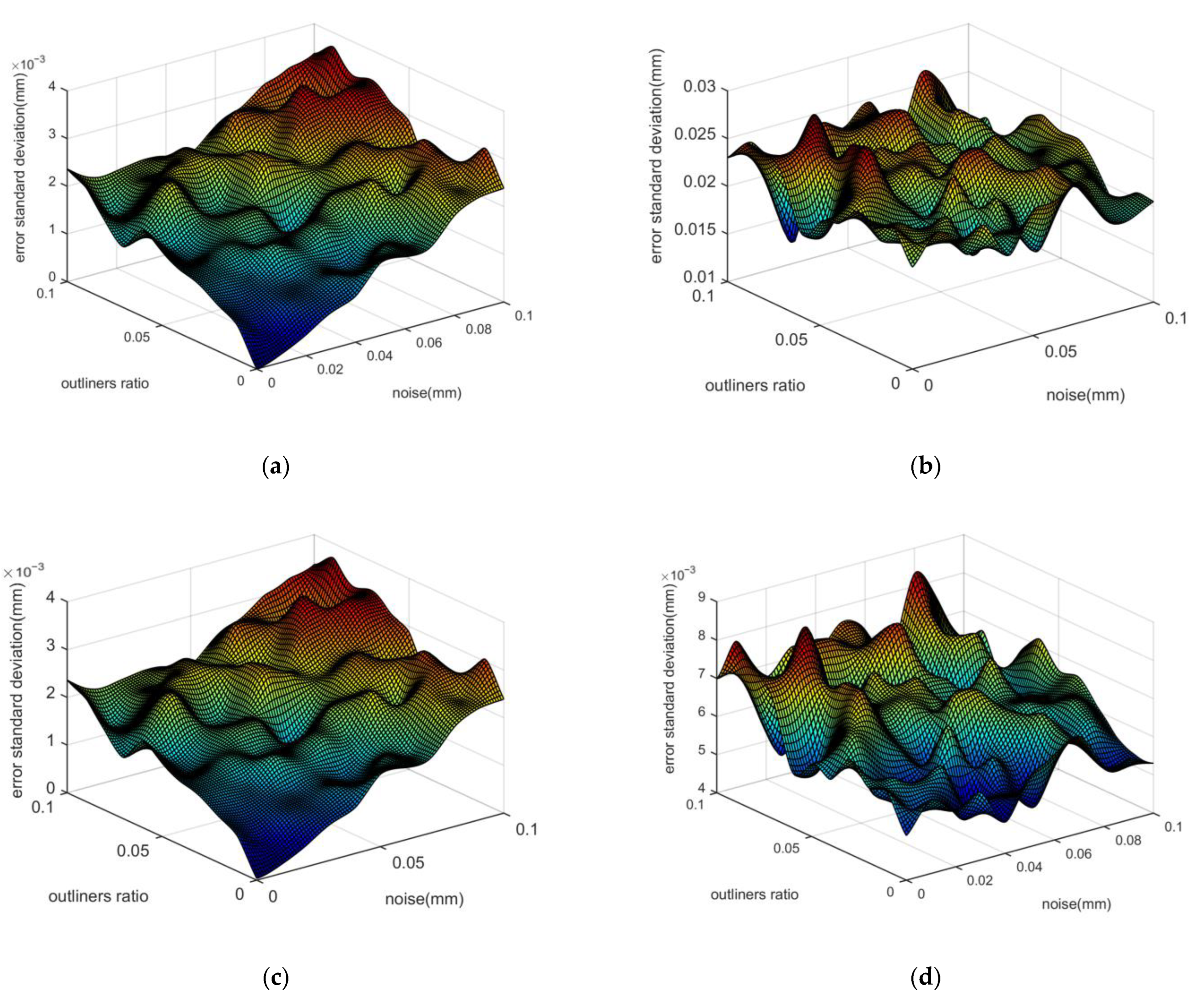
3.1. WFC Simulation Analysis
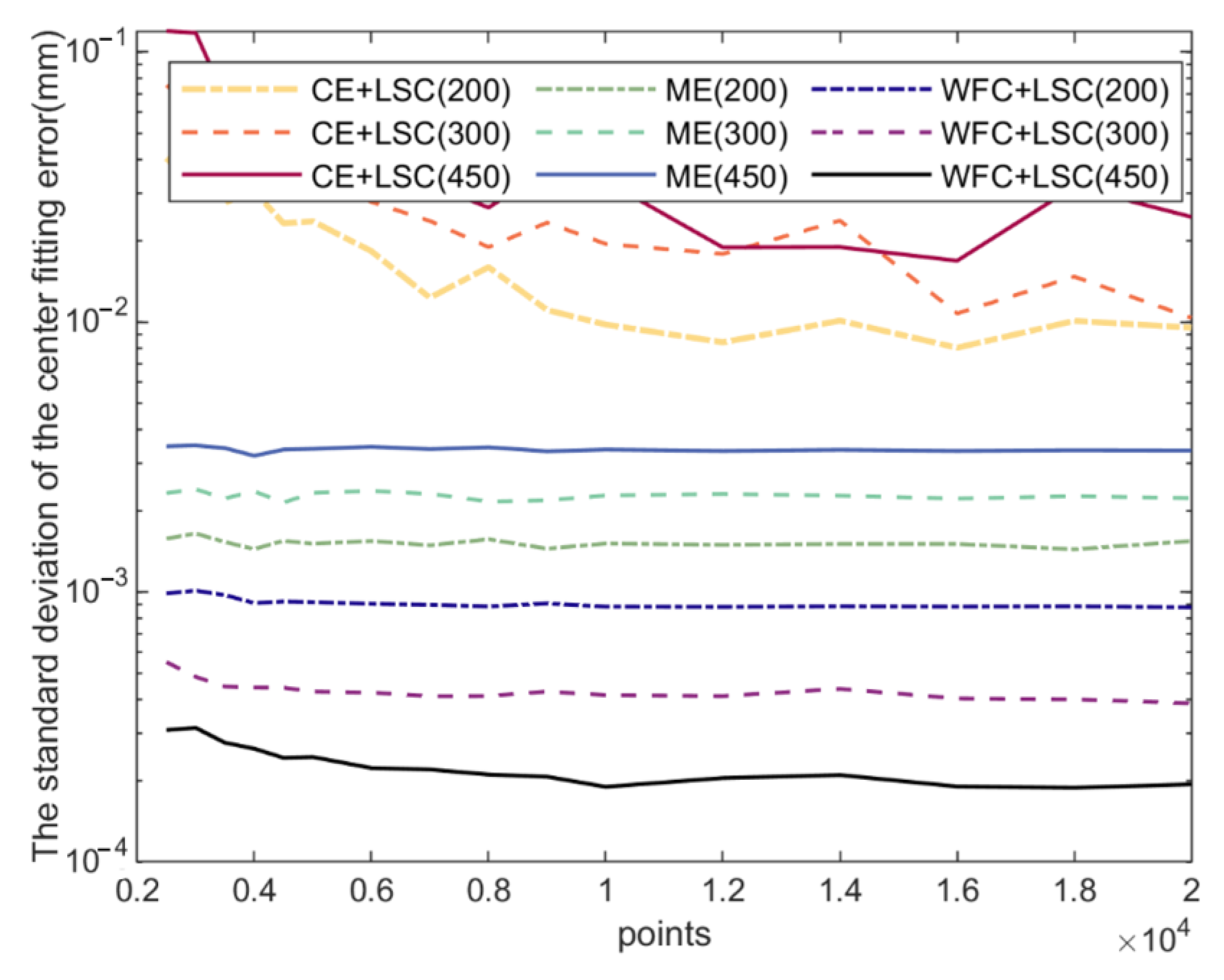
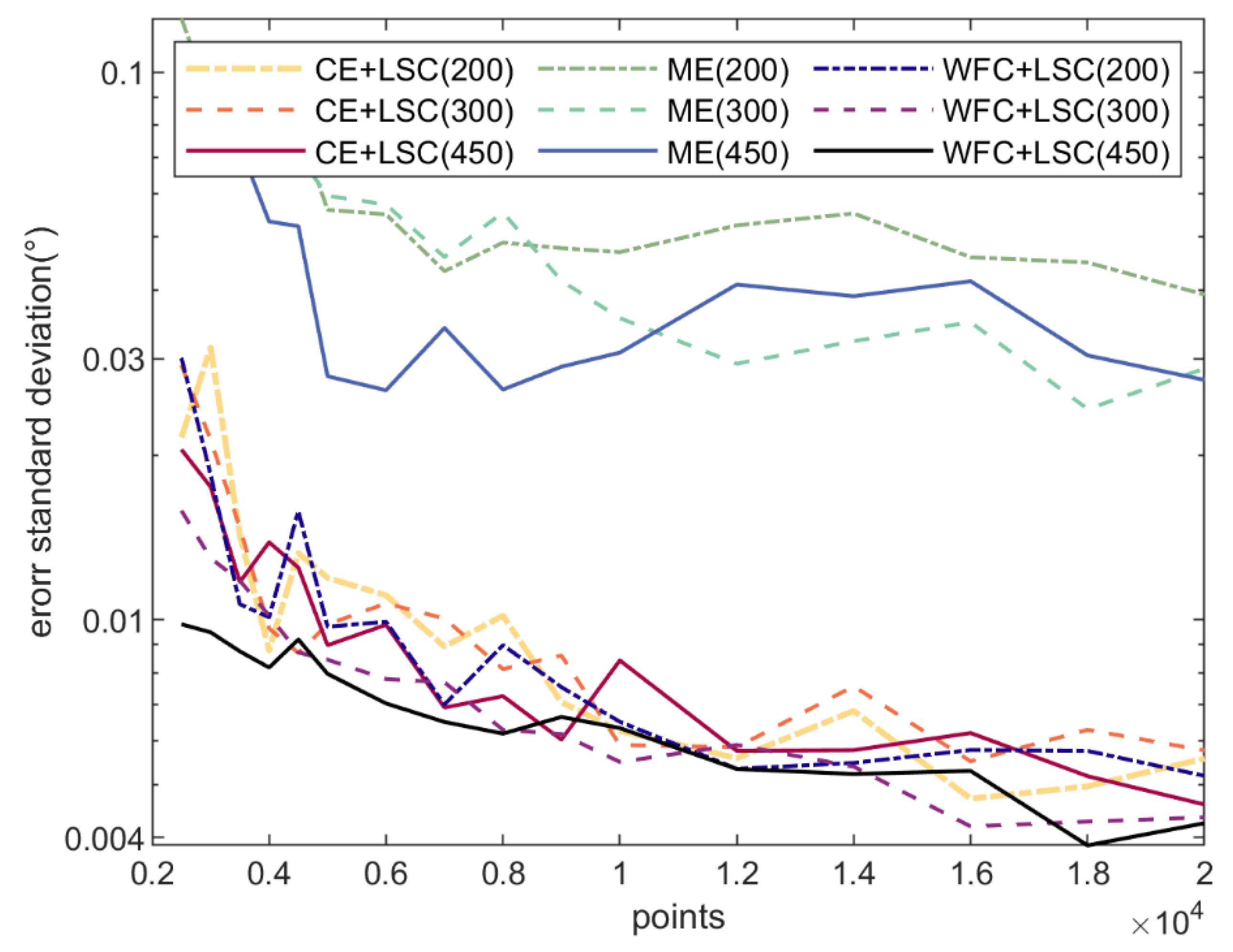
3.2. Pre-Alignment Simulation and Result
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, Y. Advanced Lithography Theory and Application of VLSI; Science Press: Beijing, China, 2016; ISBN 978-7-03-048268-6. [Google Scholar]
- Cong, M.; Du, Y.; Shen, B.; Jin, L.; Baek, S.Y. Robotic Wafer Handling Systems for Integrated Circuit Manufacturing: A Review. ROBOT 2007, 29, 261–266. [Google Scholar] [CrossRef]
- Lee, H.; Jeon, J.W.; Kim, J.; Jung, S.; Byun, J. A 12-inch wafer prealigner. Microprocess. Microsyst. 2003, 27, 151–158. [Google Scholar] [CrossRef]
- Chien, J.; Wu, M.; Lee, J. Inspection and Classification of Semiconductor Wafer Surface Defects Using CNN Deep Learning Networks. Appl. Sci. 2020, 10, 5340. [Google Scholar] [CrossRef]
- Wan, F.; Luo, H.; Liu, J. Online High-Precision Vision Measurement Method for Large-Size Gear Parameters. In Proceedings of the 2019 2nd International Conference on Robot Systems and Applications, Moscow, Russia, 4–7 August 2019; pp. 20–24. [Google Scholar]
- Shim, J.H.; Nam, T.H. Machine Vision Based Automatic Measurement Algorithm of Concentricity for Large Size Mechanical Parts. J. Phys. Conf. Ser. 2017, 806, 12002. [Google Scholar] [CrossRef]
- Huang, C.; Cao, Q.; Fu, Z. New wafer prealigner based on multi-sensor fusion. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 3455–3458. [Google Scholar]
- Rong, W.; Song, Y.; Qiao, S.; Sun, L.; Zhao, Y.; Li, C. Research on Wafer Pre-alignment System. ROBOT 2007, 331–336. [Google Scholar] [CrossRef]
- Huang, C.; Cao, Q.; Fu, Z.; Leng, C. The development of a wafer prealigner based on the multi-sensor integration. Assem. Autom. 2008, 28, 77–82. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Zhao, H.; Ren, T.; Xu, Z.; Luo, Y. The Machine Vision Measurement Module of the Modularized Flexible Precision Assembly Station for Assembly of Micro- and Meso-Sized Parts. Micromachines 2020, 11, 918. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Hu, H.; Lei, Y.; Liu, H. A Wafer Prealignment Algorithm Based on Fourier Transform and Least Square Regression. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1771–1777. [Google Scholar] [CrossRef]
- Tao, W.; Zhong, H.; Chen, X.; Selami, Y.; Zhao, H. A new fitting method for measurement of the curvature radius of a short arc with high precision. Meas. Sci. Technol. 2018, 29, 75014. [Google Scholar] [CrossRef]
- Fu, Z.; Huang, C.X.; Liu, R.Q.; Zhao, Y.Z.; Cao, Q.X. Wafer prealigning robot based on shape center calculation. Ind. Robot Int. J. 2008, 35, 536–540. [Google Scholar] [CrossRef]
- Cong, M.; Kong, X.; Du, Y.; Liu, J. Wafer pre-aligner system based on vision information processing. Inf. Technol. J. 2007, 6, 1245–1251. [Google Scholar] [CrossRef]
- Caja, J.; Maresca, P.; Gómez, E.; Barajas, C.; Berzal, M. Metrological characterization of interior circular features using digital optical machines: Calculation models and application scope. Precis. Eng. 2014, 38, 36–47. [Google Scholar] [CrossRef]
- Yu, J.; Wen, Y.; Yang, L.; Zhao, Z.; Guo, Y.; Guo, X. Monitoring on triboelectric nanogenerator and deep learning method. Nano Energy 2022, 92, 106698. [Google Scholar] [CrossRef]
- Ladrón De Guevara, I.; Muñoz, J.; de Cózar, O.D.; Blázquez, E.B. Robust Fitting of Circle Arcs. J. Math. Imaging Vis. 2011, 40, 147–161. [Google Scholar] [CrossRef]
- Qu, D.; Qiao, S.; Rong, W.; Song, Y.; Zhao, Y. Design and Experiment of The Wafer Pre-alignment System. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1483–1488. [Google Scholar]
- Araci, S.; Acikgoz, M. Construction of Fourier expansion of Apostol Frobenius–Euler polynomials and its applications. Adv. Differ. Equ. 2018, 2018, 67. [Google Scholar] [CrossRef]
- Kim, J. New Wafer Alignment Process Using Multiple Vision Method for Industrial Manufacturing. Electronics 2018, 7, 39. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Lan, Z.; Xue, C.; Lan, J.; Liu, Z.; Yang, Y. A Wafer Pre-Alignment Algorithm Based on Weighted Fourier Series Fitting of Circles and Least Squares Fitting of Circles. Micromachines 2023, 14, 956. https://doi.org/10.3390/mi14050956
Chen J, Lan Z, Xue C, Lan J, Liu Z, Yang Y. A Wafer Pre-Alignment Algorithm Based on Weighted Fourier Series Fitting of Circles and Least Squares Fitting of Circles. Micromachines. 2023; 14(5):956. https://doi.org/10.3390/mi14050956
Chicago/Turabian StyleChen, Jingsong, Zhou Lan, Cheng Xue, Jun Lan, Zhenghao Liu, and Yong Yang. 2023. "A Wafer Pre-Alignment Algorithm Based on Weighted Fourier Series Fitting of Circles and Least Squares Fitting of Circles" Micromachines 14, no. 5: 956. https://doi.org/10.3390/mi14050956
APA StyleChen, J., Lan, Z., Xue, C., Lan, J., Liu, Z., & Yang, Y. (2023). A Wafer Pre-Alignment Algorithm Based on Weighted Fourier Series Fitting of Circles and Least Squares Fitting of Circles. Micromachines, 14(5), 956. https://doi.org/10.3390/mi14050956