
Silicon Micromachined TSVs for Backside Interconnection of Ultra-Small Pressure Sensors

 , , , ,
, , , ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
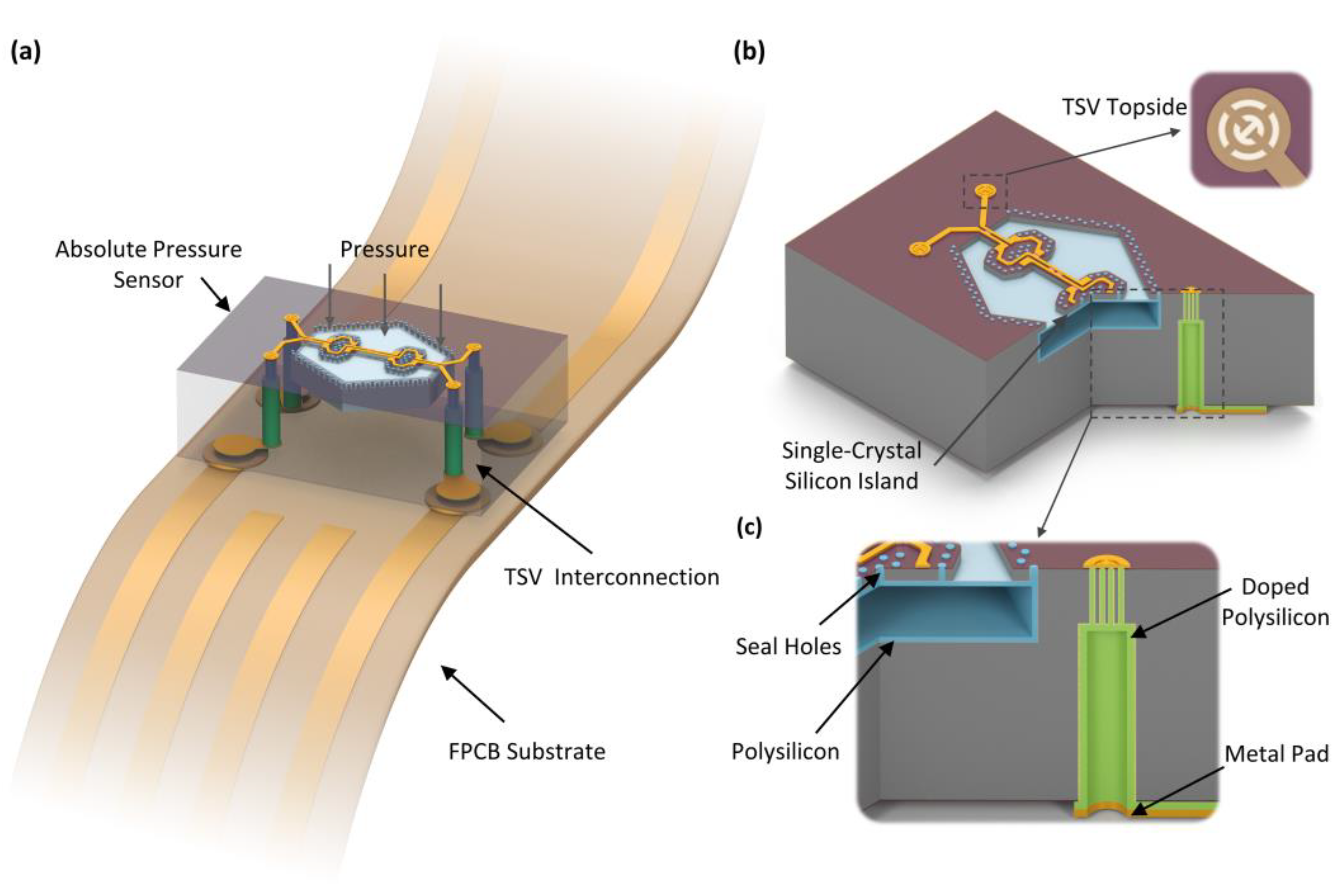
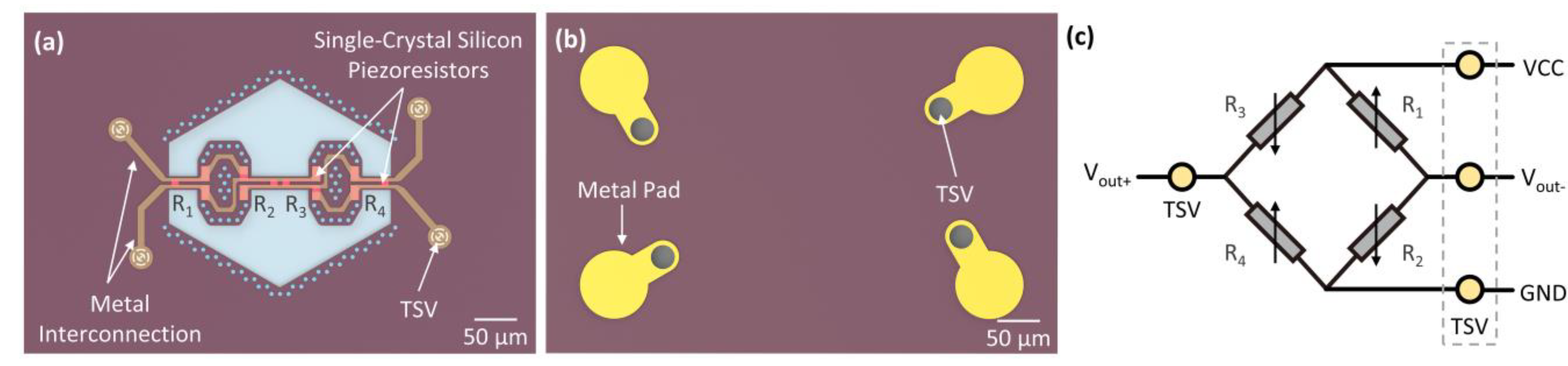
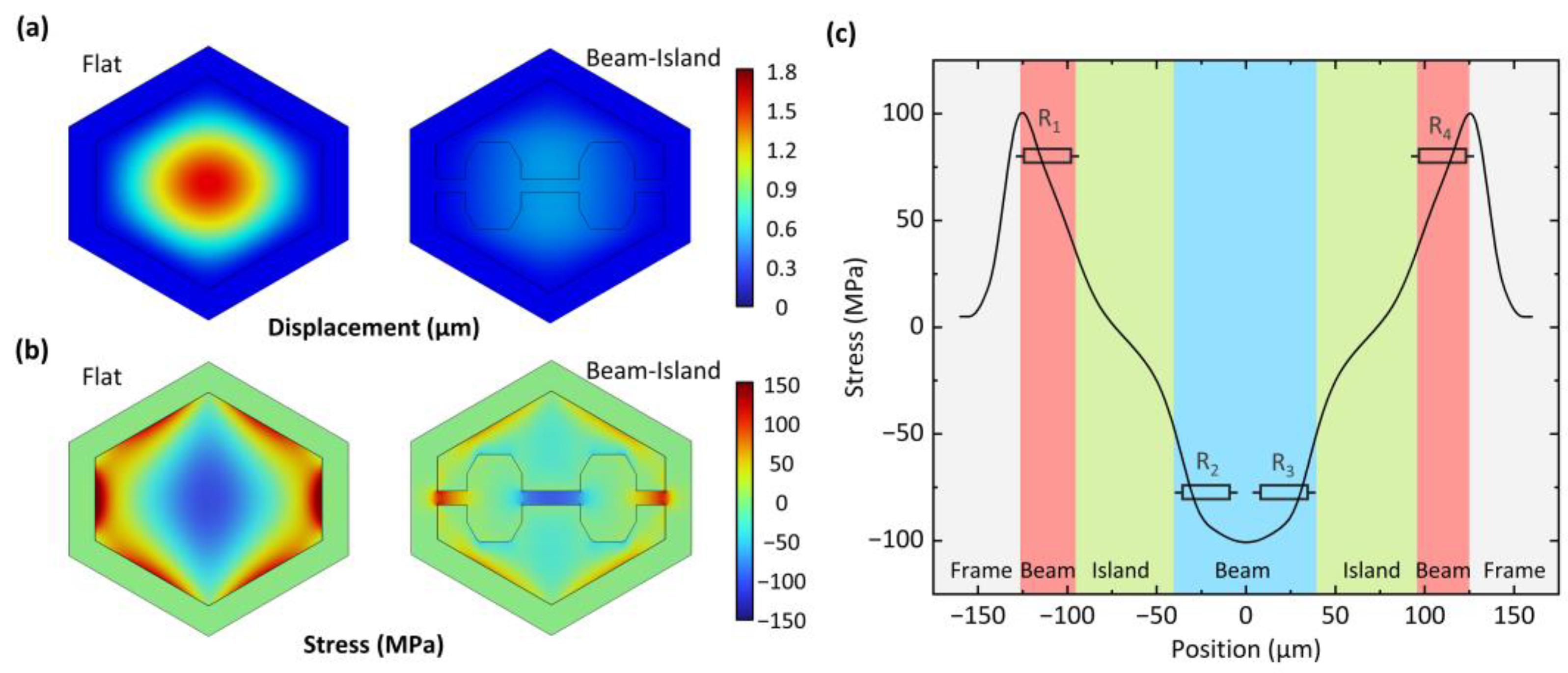
2. Sensor Design and Modeling
3. Micromachining Fabrication
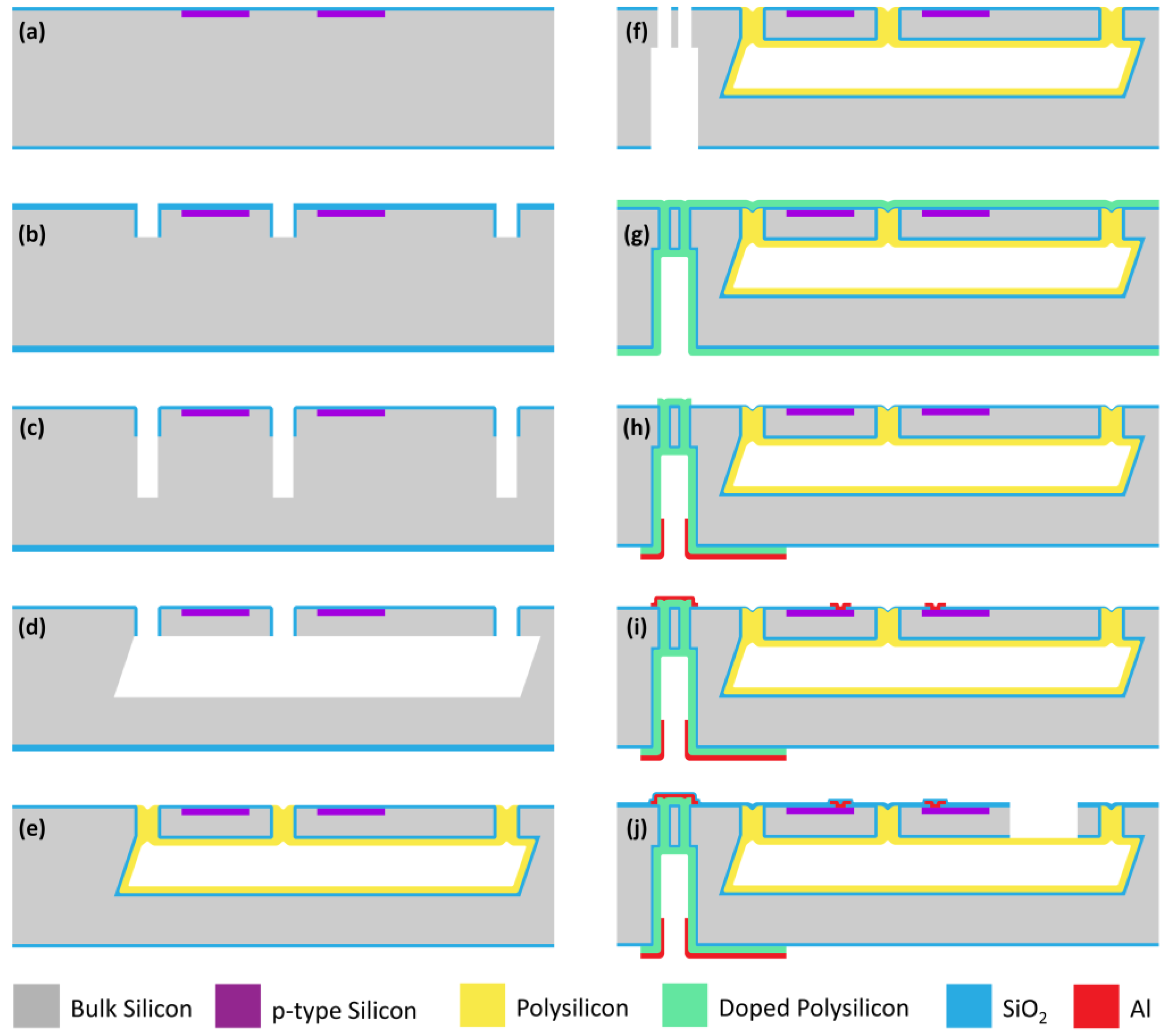
- (a)
- Thermal oxidation is performed on a (111) silicon wafer to generate a 150 nm-thick SiO2 layer. Boron ions are area-selectively implanted to create p-type piezoresistors. The implantation energy is 40 keV, and the dose is 3.5 × 1015 ion/cm2. Then, the impurities are activated by annealing. According to the simulation results of the doping process, the range of ion implantation is about 0.4 μm, indicating the thickness of the piezoresistors.
- (b)
- The microhole trenches are patterned by photolithography, and the SiO2 is etched to expose the bulk silicon by reactive ion etching (RIE). Subsequently, the silicon is etched to 8 μm in depth to determine the thickness of the single-crystal silicon beam-islands with deep RIE (DRIE). Then, 400 nm-thick SiO2 is deposited by low-pressure chemical vapor deposition (LPCVD) and is anisotropically etched by RIE to cover the trench surface. Then, the SiO2 at the trench bottom is removed by RIE for subsequent DRIE. The SiO2 sidewall is used to protect the single-crystal silicon structures against the subsequent wet etch.
- (c)
- Trenches that are 20 μm deep are further etched using DRIE to define the depth of the pressure reference chamber.
- (d)
- Tetramethylammonium hydroxide (TMAH) at a 25% concentration is used to perform the anisotropic wet etch at 80 °C. Due to the etching principles to (111) silicon, the lateral etch finally forms the pressure reference chamber. The etching process creates a hexagonal chamber enclosed by eight (111) crystal-plane sidewalls. The etching can be automatically stopped when the (111) sidewalls are exposed.
- (e)
- Thermal oxidation is performed to generate a 120 nm-thick SiO2 layer to cover all the surface, including the inside of the chamber. Then, 2.5 μm-thick polysilicon is deposited using LPCVD to form a 2.5 μm-thick film inside the chamber as a pressure-sensitive diaphragm. Simultaneously, the trenches of the microholes are sealed into a near vacuum. During the polysilicon deposition, the pressure inside the LPCVD furnace is controlled at 30 Pa. After the process, the wafers are cooled to room temperature, and the pressure inside the sealed pressure reference chamber will be less than 10 Pa, which is an approximate vacuum. Subsequently, the polysilicon on the surface is removed by RIE to eliminate the surface protrusions.
- (f)
- Double-sided patterning and etching of TSVs are next. The fabrication of the TSVs is carried out in two separate steps. First, the trenches on the front side of the wafer are patterned and etched using DRIE. The etching depth is set to 30 μm. Then, the vias on the backside are patterned and etched by DRIE until the front-side trenches are exposed.
- (g)
- Thermal oxidation is performed to generate a 150 nm-thick SiO2 layer for electrical insulation of the TSVs. Then, phosphorus-doped polysilicon with a thickness of 1.5 μm is deposited by LPCVD [26,27]. The PH3 as-deposited doped polysilicon covers the inner wall of the TSV and refills the trenches on the front-side, thus realizing the electrical connection between the two sides. The resistivity of the doped polysilicon is measured at about 9 mΩ·cm.
- (h)
- The polysilicon on the top surface is removed by RIE, while the polysilicon in the TSV regions is retained to enhance the contact with the metal. Aluminum at 1 μm-thick is sputtered on the backside of the wafer. The aluminum pads are patterned, and the polysilicon pattern is formed using ion beam etching and RIE.
- (i)
- The contact holes of the single-crystal silicon piezoresistors are patterned by removing SiO2 with RIE. The interconnections between the piezoresistors and the TSVs are formed by sputtering and patterning an aluminum layer.
- (j)
- SiO2 at 300 nm thick is deposited on the front side using plasma-enhanced CVD as the passivation layer. Finally, the beam–island structure is formed by masked etching of SiO2/silicon/SiO2 with RIE, thereby realizing the structural release of the pressure-sensitive structure.
4. Test Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, S.; Zhu, M.; Ma, B.; Yuan, W. Design and Optimization of a Micro Piezoresistive Pressure Sensor. In Proceedings of the 2008 3rd IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Sanya, China, 6–9 January 2008; pp. 351–356. [Google Scholar]
- Aravamudhan, S.; Bhansali, S. Reinforced Piezoresistive Pressure Sensor for Ocean Depth Measurements. Sens. Actuators A Phys. 2008, 142, 111–117. [Google Scholar] [CrossRef]
- Pramanik, C.; Saha, H.; Gangopadhyay, U. Design Optimization of a High Performance Silicon MEMS Piezoresistive Pressure Sensor for Biomedical Applications. J. Micromech. Microeng. 2006, 16, 2060. [Google Scholar] [CrossRef]
- Santosh Kumar, S.; Tanwar, A. Development of a MEMS-Based Barometric Pressure Sensor for Micro Air Vehicle (MAV) Altitude Measurement. Microsyst. Technol. 2020, 26, 901–912. [Google Scholar] [CrossRef]
- Qi, X.; Wang, S.; Jiang, J.; Liu, K.; Wang, X.; Yang, Y.; Liu, T. Fiber Optic Fabry-Perot Pressure Sensor With Embedded MEMS Micro-Cavity for Ultra-High Pressure Detection. J. Light. Technol. 2019, 37, 2719–2725. [Google Scholar] [CrossRef]
- Fragiacomo, G.; Reck, K.; Lorenzen, L.; Thomsen, E.V. Novel Designs for Application Specific MEMS Pressure Sensors. Sensors 2010, 10, 9541–9563. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- DeHennis, A.D.; Wise, K.D. A Fully Integrated Multisite Pressure Sensor for Wireless Arterial Flow Characterization. J. Microelectromechan. Syst. 2006, 15, 678–685. [Google Scholar] [CrossRef]
- Fu, X.; Zhou, Z.; Xiong, W.; Guo, Q. MEMS-Based Low-Cost Flight Control System for Small UAVs. Tsinghua Sci. Technol. 2008, 13, 614–618. [Google Scholar] [CrossRef]
- Guo, Y.; Li, Y.-H.; Guo, Z.; Kim, K.; Chang, F.-K.; Wang, S.X. Bio-Inspired Stretchable Absolute Pressure Sensor Network. Sensors 2016, 16, 55. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Sun, K.; Zheng, R.; Sun, Y.; Yang, H.; Zhong, Y.; Li, X. Three-Dimensional Arterial Pulse Signal Acquisition in Time Domain Using Flexible Pressure-Sensor Dense Arrays. Micromachines 2021, 12, 569. [Google Scholar] [CrossRef] [PubMed]
- Firtat, B.; Moldovan, C.; Iosub, R.; Necula, D.; Nisulescu, M. Differential Piezoresistive Pressure Sensor. In Proceedings of the 2007 International Semiconductor Conference, Sinaia, Romania, 15 October–17 September 2007; Volume 1, pp. 87–90. [Google Scholar]
- Merlos, A.; Santander, J.; Alvarez, M.D.; Campabadal, F. Optimized Technology for the Fabrication of Piezoresistive Pressure Sensors. J. Micromech. Microeng. 2000, 10, 204. [Google Scholar] [CrossRef]
- Belsito, L.; Mancarella, F.; Roncaglia, A. Fabrication of Capacitive Absolute Pressure Sensors by Thin Film Vacuum Encapsulation on SOI Substrates. J. Micromech. Microeng. 2016, 26, 095018. [Google Scholar] [CrossRef]
- Wang, T.; Tang, Z.; Lin, H.; Zhan, K.; Wan, J.; Wu, S.; Gu, Y.; Luo, W.; Zhang, W. A Low Temperature Drifting Acoustic Wave Pressure Sensor with an Integrated Vacuum Cavity for Absolute Pressure Sensing. Sensors 2020, 20, 1788. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fujita, T.; Fukumoto, Y.; Suzuki, F.; Maenaka, K. SOI-MEMS Sensor for Multi-Environmental Sensing-System. In Proceedings of the 2007 Fourth International Conference on Networked Sensing Systems, Braunschweig, Germany, 6–8 June 2007; pp. 146–149. [Google Scholar]
- Je, C.H.; Lee, S.Q.; Yang, W.S. High Sensitivity Surface Micromachined Absolute Pressure Sensor. Procedia Eng. 2016, 168, 725–728. [Google Scholar] [CrossRef]
- Godovitsyn, I.V.; Amelichev, V.V.; Pankov, V.V. A High Sensitivity Surface-Micromachined Pressure Sensor. Sens. Actuators A Phys. 2013, 201, 274–280. [Google Scholar] [CrossRef]
- Motoyoshi, M. Through-Silicon Via (TSV). Proc. IEEE 2009, 97, 43–48. [Google Scholar] [CrossRef]
- Wang, M.-J.; Hung, C.-Y.; Kao, C.-L.; Lee, P.-N.; Chen, C.-H.; Hung, C.-P.; Tong, H.-M. TSV Technology for 2.5D IC Solution. In Proceedings of the 2012 IEEE 62nd Electronic Components and Technology Conference, San Diego, CA, USA, 29 May–1 June 2012; pp. 284–288. [Google Scholar]
- Lau, J.H. Evolution and Outlook of TSV and 3D IC/Si Integration. In Proceedings of the 2010 12th Electronics Packaging Technology Conference, Singapore, 8–10 December 2010; pp. 560–570. [Google Scholar]
- Hirama, I. New MEMS Sensor Process by TSV Technology for Smaller Packaginge. In Proceedings of the 2015 International Conference on Electronics Packaging and iMAPS All Asia Conference (ICEP-IAAC), Kyoto, Japan, 14–17 April 2015; pp. 456–459. [Google Scholar]
- Yang, H.S.; Bakir, M.S. 3D Integration of CMOS and MEMS Using Mechanically Flexible Interconnects (MFI) and through Silicon Vias (TSV). In Proceedings of the 2010 Proceedings 60th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 1–4 June 2010; pp. 822–828. [Google Scholar]
- Wang, J.; Yang, L.; Li, X. On-Chip Integrated PS3 (Packaging-Stress Suppressed Suspension) for Thermal-Stress Fress Package of Pressure Sensors. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 49–52. [Google Scholar]
- Zou, H.; Wang, J.; Li, X. A Novel TUB (Thin-Film under Bulk) Process for High-Performance Pressure Sensors of Sub-KPa Measure-Range. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 214–217. [Google Scholar]
- Bao, M. Micro Mechanical Transducers: Pressure Sensors, Accelerometers and Gyroscopes; Elsevier: Amsterdam, The Netherlands, 2000; ISBN 978-0-08-052403-0. [Google Scholar]
- Biebl, M.; Mulhern, G.T.; Howe, R.T. In Situ Phosphorus-Doped Polysilicon for Integrated Mems. In Proceedings of the International Solid-State Sensors and Actuators Conference—TRANSDUCERS ’95, Stockholm, Sweden, 25–29 June 1995; Volume 1, pp. 198–201. [Google Scholar]
- Kurokawa, H. P-Doped Polysilicon Film Growth Technology. J. Electrochem. Soc. 1982, 129, 2620. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, W.; Li, P.; Zhang, H.; Sun, K.; Li, W.; Wang, J.; Yang, H.; Li, X. Silicon Micromachined TSVs for Backside Interconnection of Ultra-Small Pressure Sensors. Micromachines 2023, 14, 1448. https://doi.org/10.3390/mi14071448
Feng W, Li P, Zhang H, Sun K, Li W, Wang J, Yang H, Li X. Silicon Micromachined TSVs for Backside Interconnection of Ultra-Small Pressure Sensors. Micromachines. 2023; 14(7):1448. https://doi.org/10.3390/mi14071448
Chicago/Turabian StyleFeng, Weiwen, Peng Li, Haozhi Zhang, Ke Sun, Wei Li, Jiachou Wang, Heng Yang, and Xinxin Li. 2023. "Silicon Micromachined TSVs for Backside Interconnection of Ultra-Small Pressure Sensors" Micromachines 14, no. 7: 1448. https://doi.org/10.3390/mi14071448