
Shape Control of a Unimorph Deformable Mirror for Space Active Optics under Uncertainties


Abstract
:1. Introduction
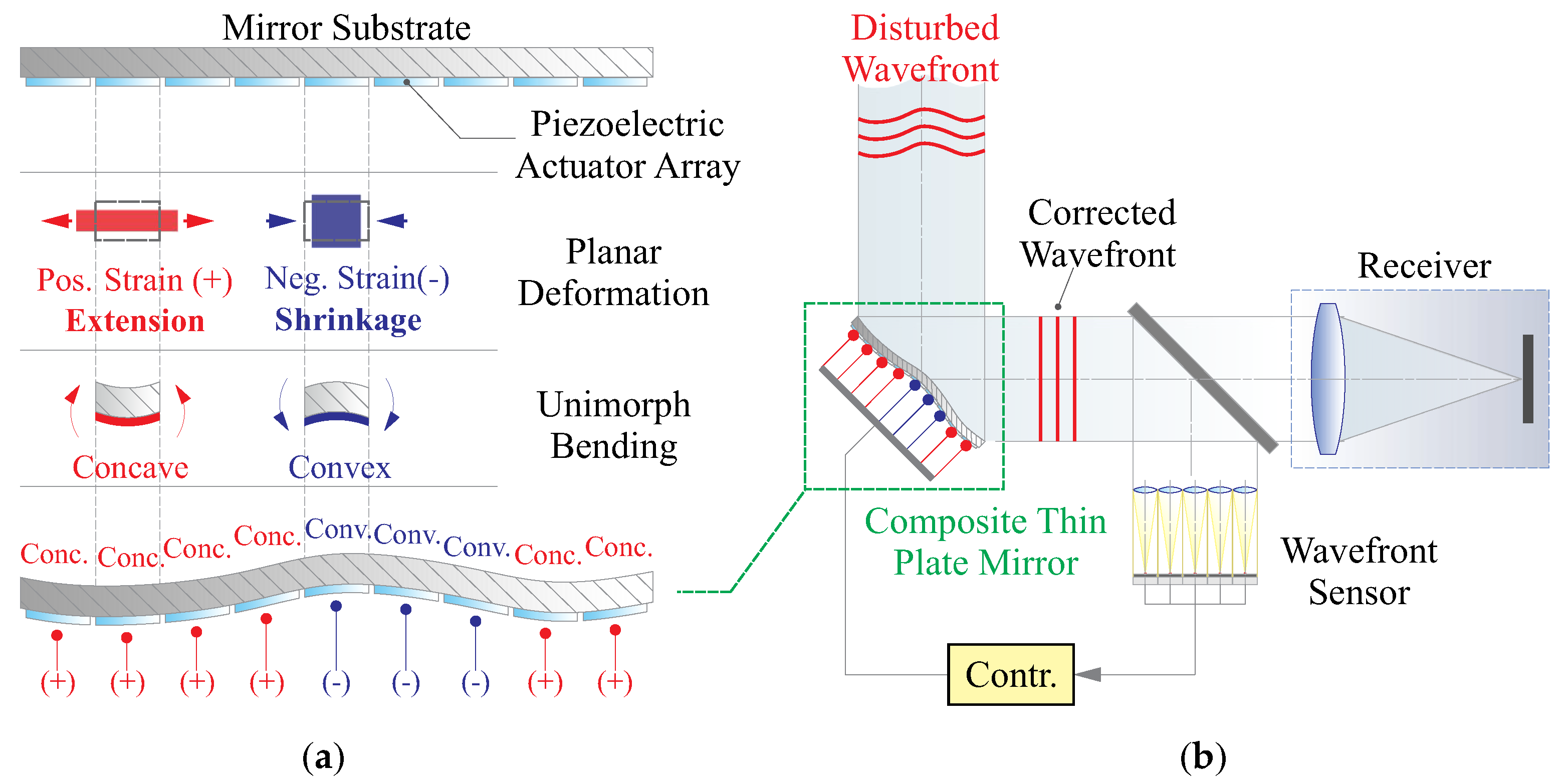
2. Framework of Quasi-Static Control
3. Mechanics of Morphing Behaviour of a Deformable Mirror with Environmental and Structural Uncertainties
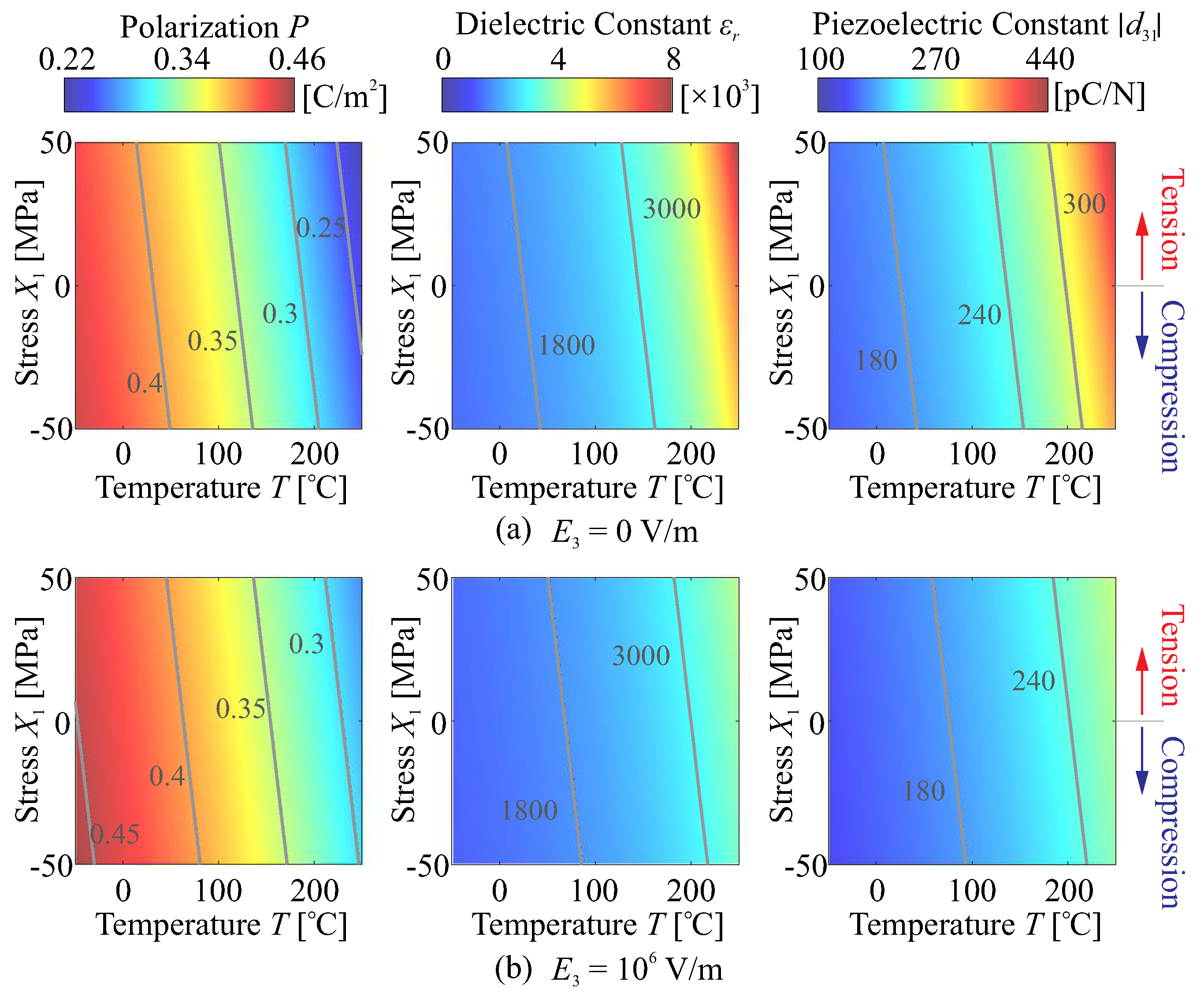
3.1. Ferroelectric Behaviour of Actuation Layer
Thermal Deformation
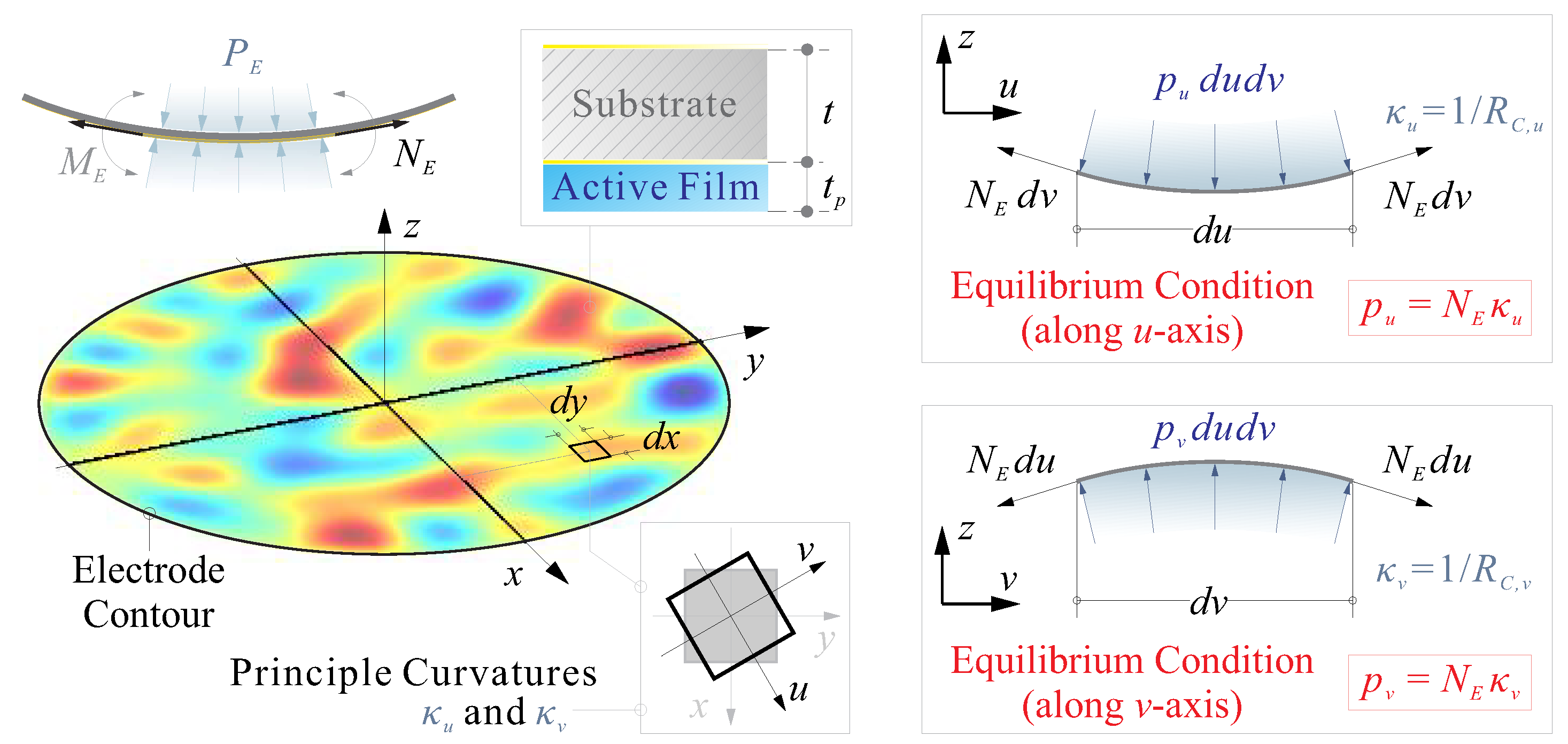
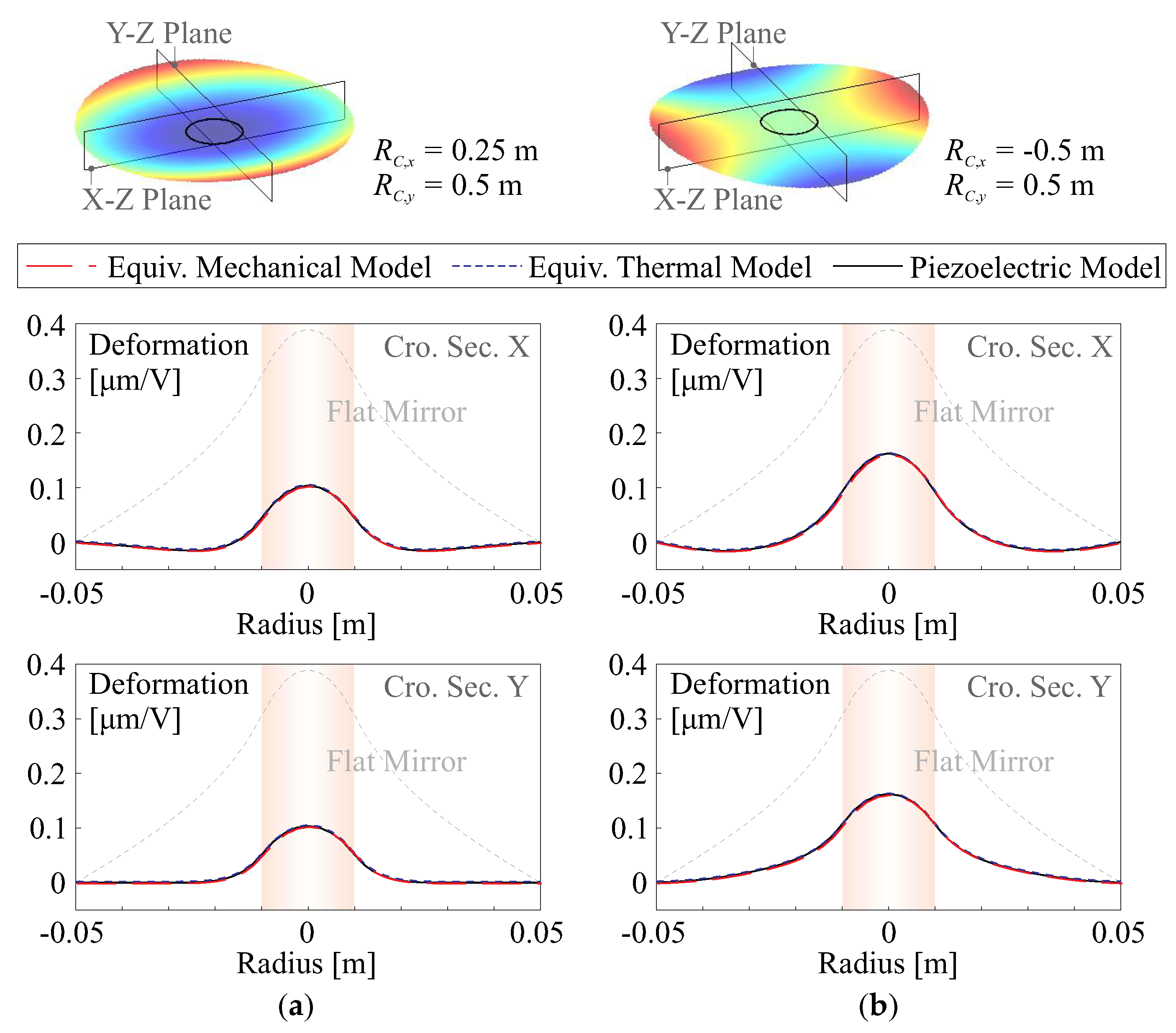
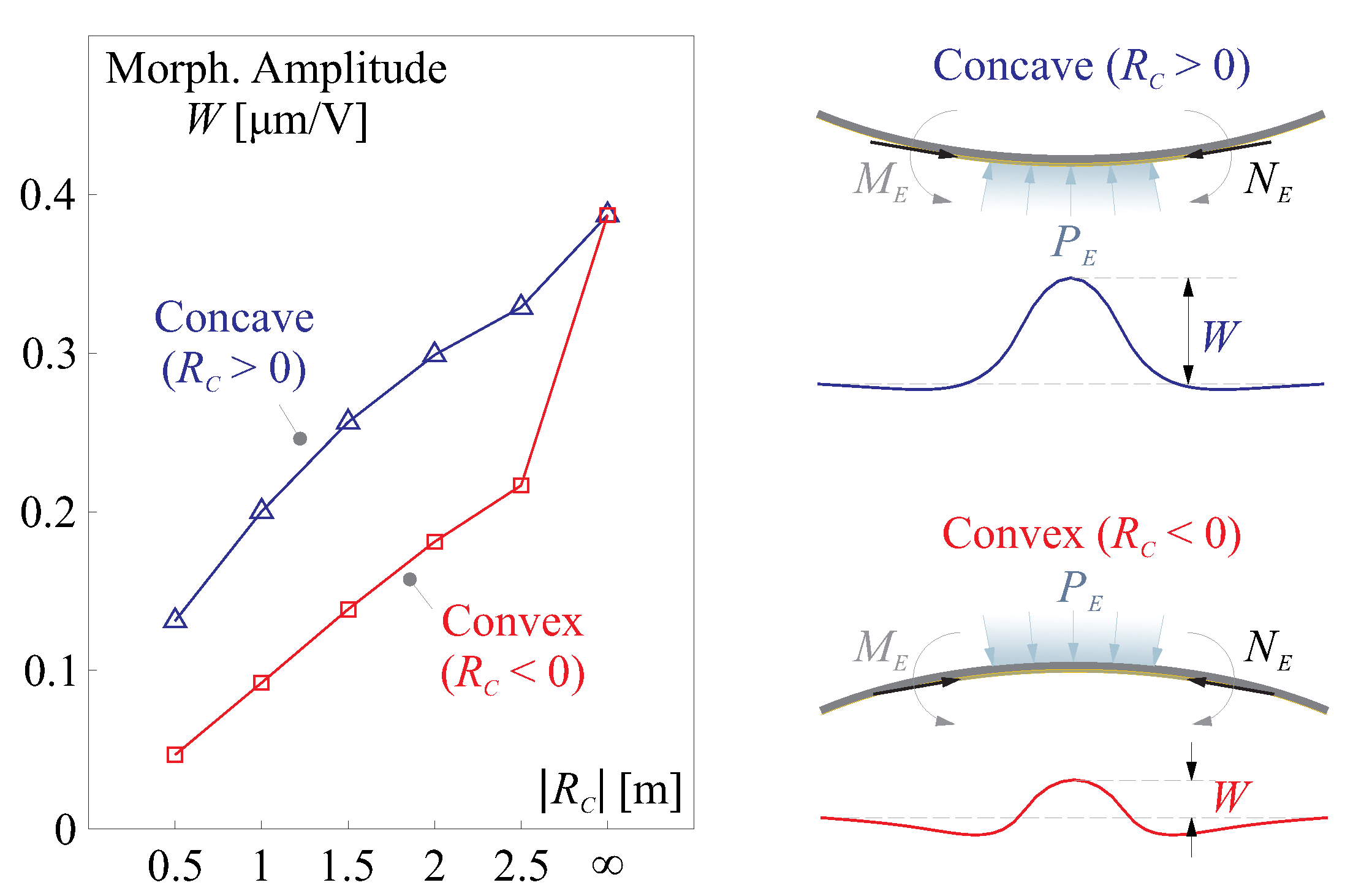
3.2. Variation on Morphing Capability with Surface Curvature
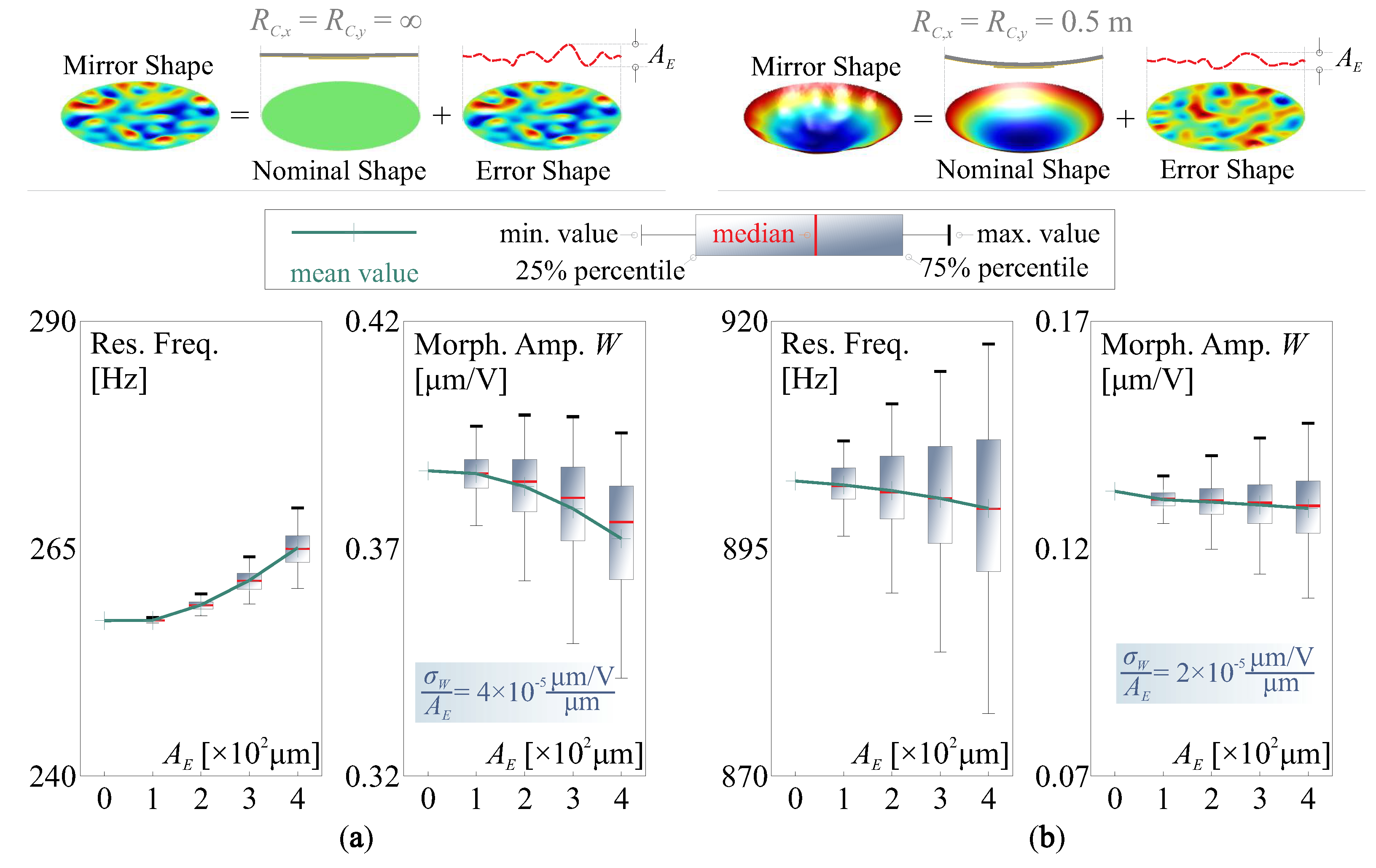
3.2.1. Compensation of Initial Shape Aberration
3.3. Stress Induced Geometric Stiffness in Composite Mirrors
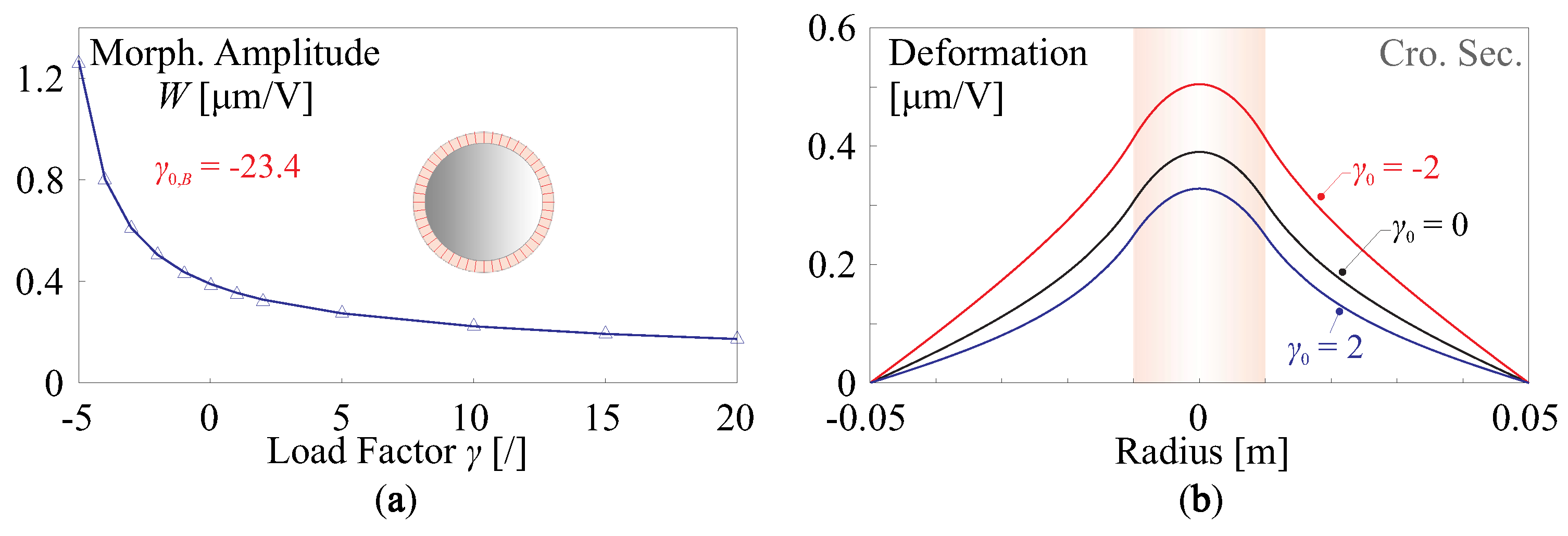
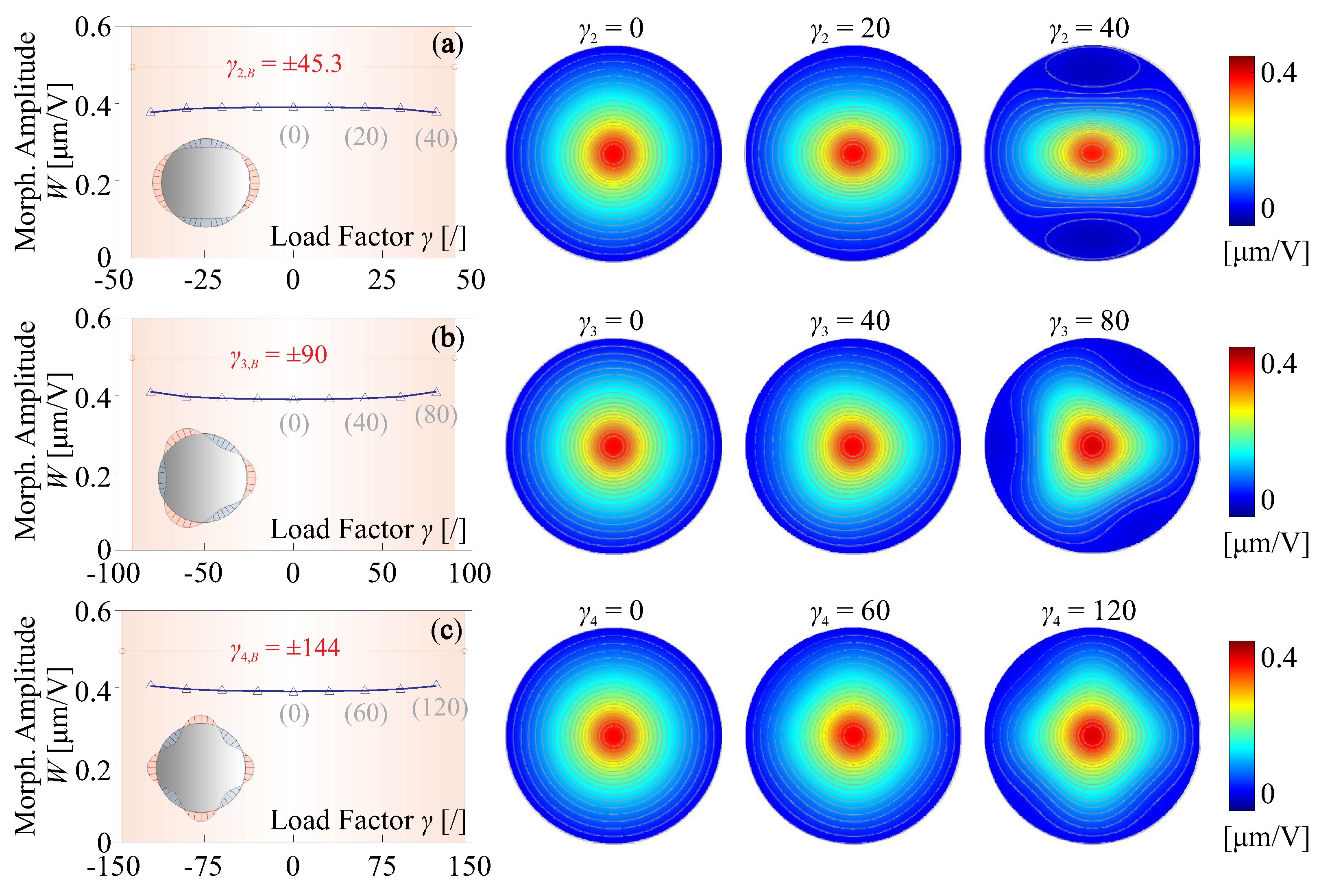
3.3.1. Change of Morphing Strokes by Edge Loads
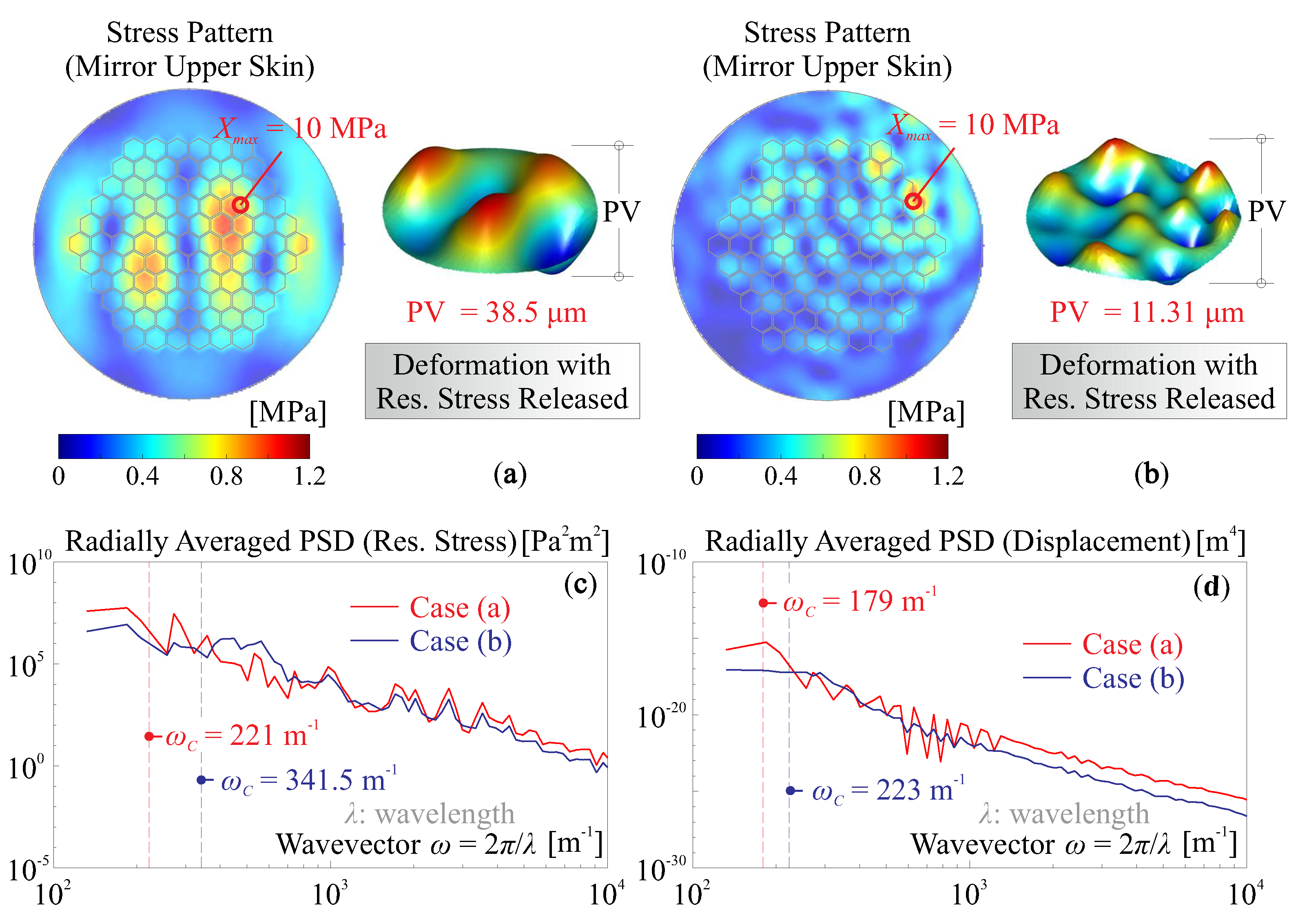
3.3.2. Release of Internal Stress among Layers
4. Influence on the Jacobian Matrix by Uncertain Factors and Control Strategies
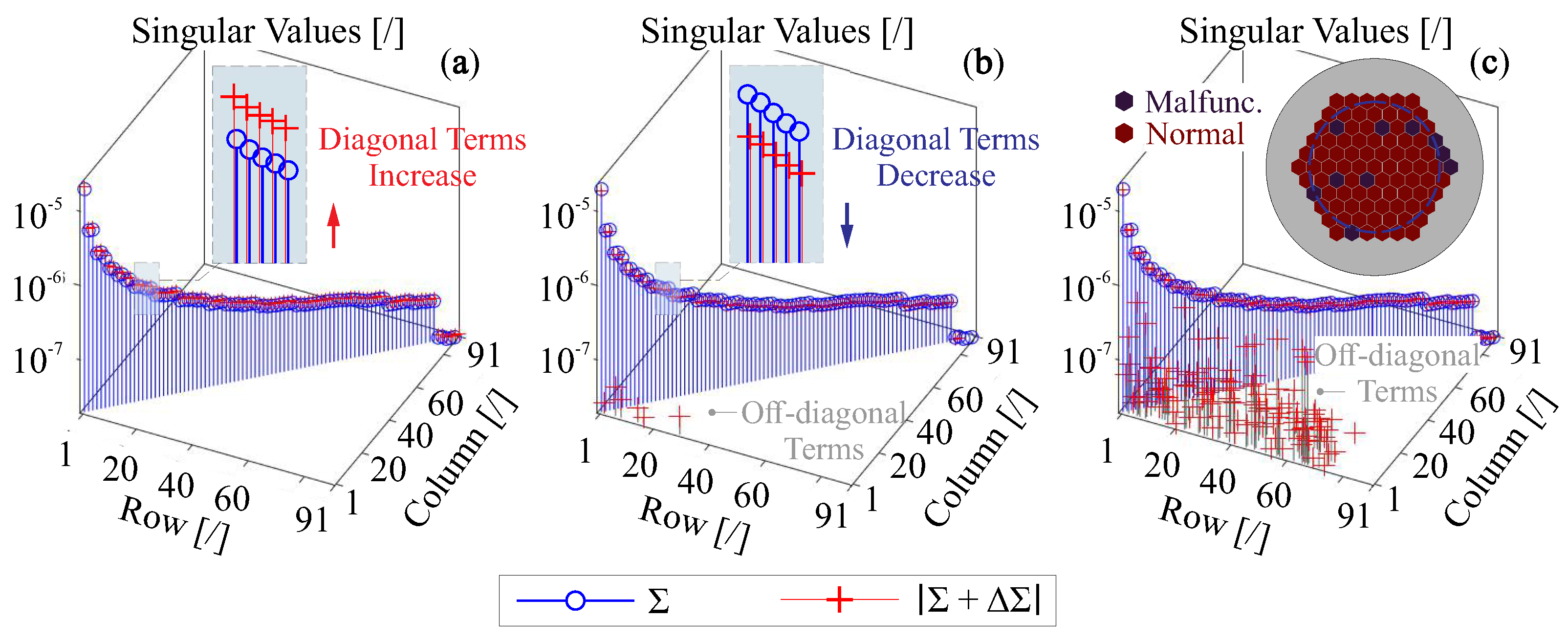
4.1. Singular Value Decomposition of Perturbed Jacobian
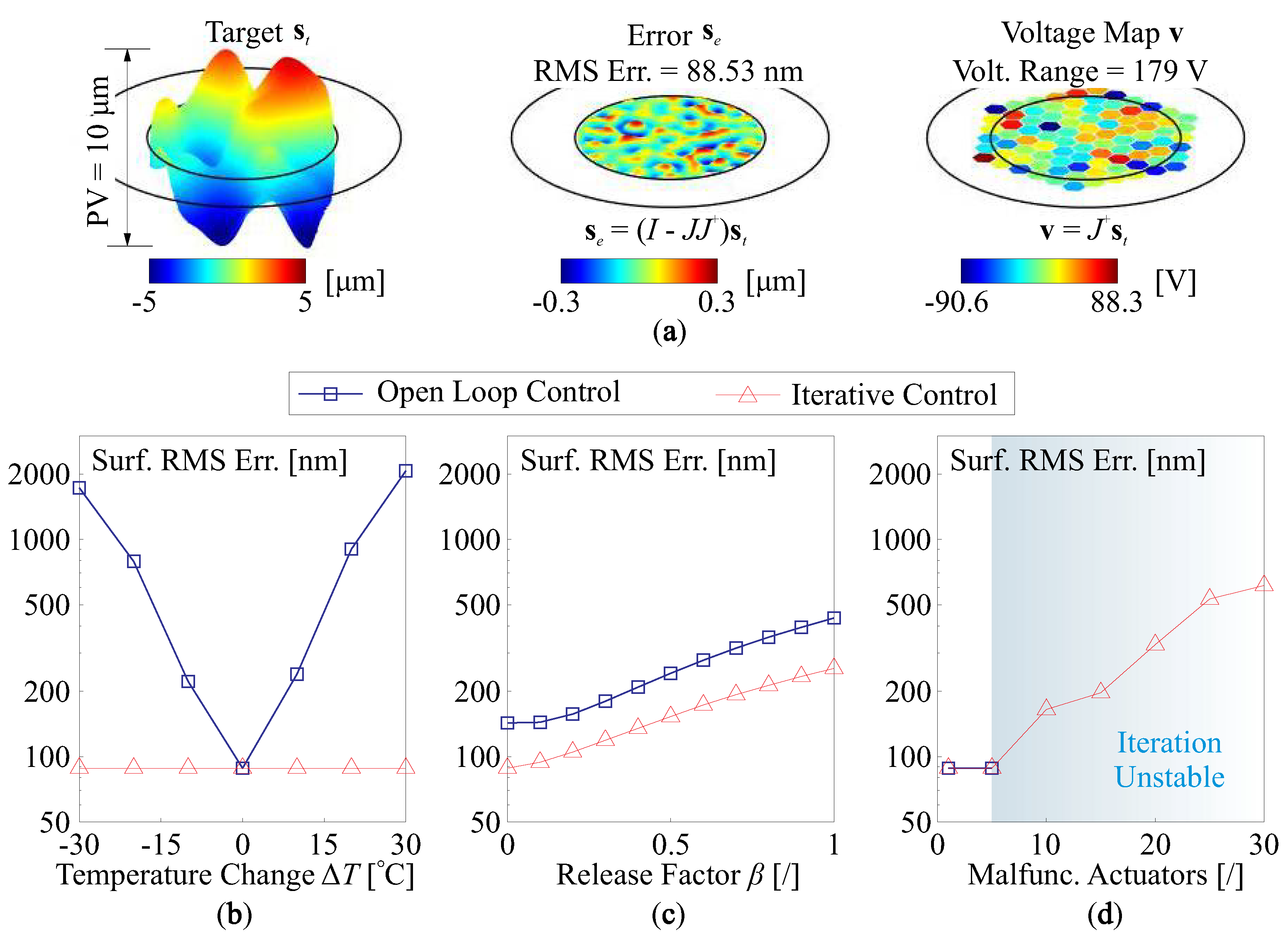
4.2. Open Loop Control and Iterative Control
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AO | Adaptive Optics or Active Optics |
| CTE | Coefficient of Thermal Expansion |
| DM | Deformable Mirror |
| DLS | Damped Least Squares |
| DoF | Degree-of-Freedom |
| FoV | Field-of-View |
| FE | Finite Element |
| GS | Guide Star |
| LS | Least Squares |
| PMN-PT | Lead Magnesium Niobate—Lead Titanate |
| PSD | Power Spectral Density |
| PV | Peak to Valley |
| PVDF-TrFE | PolyVinylidene Fluoride-co-TriFluoroEthylene |
| PZT | Lead Zirconate Titanate |
| SLM | Spatial Light Modulator |
| SR | Strehl Ratio |
| SVD | Singular Value Decomposition |
| RMS | Root Mean Square |
References
- Trumper, I.; Hallibert, P.; Arenberg, J.W.; Kunieda, H.; Guyon, O.; Stahl, H.P.; Kim, D.W. Optics Technology for Large-aperture Space Telescopes: From Fabrication to Final Acceptance Tests. Adv. Opt. Photonics 2018, 10, 644–702. [Google Scholar] [CrossRef]
- Chen, S.; Huang, H. Optimum Design of a Space Frame and Its Application in Satellite Structure. J. Spacecr. Rocket. 2010, 47, 1063–1066. [Google Scholar] [CrossRef]
- Meguro, A.; Shintate, K.; Usui, M.; Tsujihata, A. In-orbit Deployment Characteristics of Large Deployable Antenna Reflector Onboard Engineering Test Satellite VIII. Acta Astronaut. 2009, 65, 1306–1316. [Google Scholar] [CrossRef]
- Wang, K.; Yu, Y.; Preumont, A. Wavefront Control Strategies for Large Active Thin Shell Primaries with Unimorph Actuators. Actuators 2023, 12, 100. [Google Scholar] [CrossRef]
- Roddier, F. Adaptive Optics in Astronomy; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Tyson, R.K. Principle of Adaptive Optics; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Sinquin, J.C.; Lurçon, J.M.; Guillemard, C. Deformable Mirror Technologies for Astronomy at CILAS. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Marseille, France, 23–28 June 2008. [Google Scholar]
- Wlodarczyk, K.L.; Bryce, E.; Schwartz, N.; Strachan, M.; Hutson, D.; Maier, R.R.; Atkinson, D.; Beard, S.; Baillie, T.; Parr-Burman, P.; et al. Scalable Stacked Array Piezoelectric Deformable Mirror for Astronomy And Laser Processing Applications. Rev. Sci. Instrum. 2014, 85, 024502. [Google Scholar] [CrossRef]
- Stroebele, S.; Vernet, E.; Brinkmann, M.; Jakob, G.; Lilley, P.; Casali, M.; Madec, P.Y.; Kasper, M. Deformable Mirrors Development Program at ESO. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Edinburgh, UK, 26 June–1 July 2016. [Google Scholar]
- Rausch, P.; Verpoort, S.; Wittrock, U. Unimorph Deformable Mirror for Space Telescopes: Design and Manufacturing. Opt. Express 2015, 23, 19469–19477. [Google Scholar] [CrossRef] [PubMed]
- Alaluf, D.; Bastaits, R.; Wang, K.; Horodinca, M.; Martic, G.; Mokrani, B.; Preumont, A. Unimorph Mirror for Adaptive Optics in Space Telescopes. Appl. Opt. 2018, 57, 362–3638. [Google Scholar] [CrossRef]
- Wang, K.; Godfroid, T.; Robert, D.; Preumont, A. Electrostrictive PVDF-TrFE Thin Film Actuators for the Control of Adaptive Thin Shell Reflectors. Actuators 2020, 9, 53. [Google Scholar] [CrossRef]
- Wang, K.; Godfroid, T.; Robert, D.; Preumont, A. Adaptive Shell Spherical Reflector Actuated with PVDF-TrFE Thin Film Strain Actuators. Actuators 2021, 10, 7. [Google Scholar] [CrossRef]
- Cousty, R.; Antonini, T.; Aubry, M.; Krol, H.T.; Moreau, A. Monomorph Deformable Mirrors: From Ground-Based Facilities to Space Telescopes. In Proceedings of the SPIE International Conference on Space Optics—ICSO 2016, Biarritz, France, 18–21 October 2016. [Google Scholar]
- Wang, K.; Alaluf, D.; Preumont, A. Thermal Balance and Active Damping of a Piezoelectric Deformable Mirror for Adaptive Optics. Actuators 2019, 8, 75. [Google Scholar] [CrossRef]
- Uchino, K. Electrothermal Phenomena in Ferroelectrics. Actuators 2020, 9, 93. [Google Scholar] [CrossRef]
- Li, F.; Xu, Z.; Wei, X.; Yao, X. Determination of Temperature Dependence of Piezoelectric Coefficients Matrix of Lead Zirconate Titanate Ceramics by Quasi-static and Resonance Method. J. Phys. Appl. Phys. 2009, 42, 095417. [Google Scholar] [CrossRef]
- Zhou, D.; Kamlah, M.; Munz, D. Effects of Uniaxial Prestress on The Ferroelectric Hysteretic Response of Soft PZT. J. Eur. Ceram. Soc. 2005, 25, 425–432. [Google Scholar] [CrossRef]
- Zhang, Q.M.; Zhao, J. Electromechanical Properties of Lead Zirconate Titanate Piezoceramics under the Influence of Mechanical Stresses. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1999, 46, 1518–1526. [Google Scholar] [CrossRef] [PubMed]
- Preumont, A. Twelve Lectures on Structural Dynamics; Springer International Publishing: Cham, Switzerland, 2013. [Google Scholar]
- Bastaits, R.; Alaluf, D.; Belloni, E.; Rodrigues, G.; Preumont, A. Segmented Bimorph Mirrors for Adaptive Optics: Morphing Strategy. Appl. Opt. 2014, 53, 4825–4832. [Google Scholar] [CrossRef]
- Wang, K.; Alaluf, D.; Mokrani, B.; Preumont, A. Control-structure Interaction in Piezoelectric Deformable Mirrors for Adaptive Optics. Smart Struct. Syst. 2018, 21, 777. [Google Scholar]
- Lai, G.; Yatagai, T. Generalized Phase-shifting Interferometry. J. Opt. Soc. Am. A 1991, 8, 822–827. [Google Scholar] [CrossRef]
- Kinnstaetter, K.; Lohmann, A.W.; Schwider, J.; Streibl, N. Accuracy of Phase Shifting Interferometry. Appl. Opt. 1988, 27, 5082–5089. [Google Scholar] [CrossRef] [PubMed]
- Joannes, L.; Dubois, F.; Legros, J.C. Phase-Shifting Schlieren: High-Resolution Quantitative Schlieren that Uses the Phase-Shifting Technique Principle. Appl. Opt. 2003, 42, 5046–5053. [Google Scholar] [CrossRef]
- Primot, J. Theoretical Description of Shack–Hartmann Wave-front Sensor. Opt. Commun. 2003, 222, 81–92. [Google Scholar] [CrossRef]
- Poyneer, L.A. Scene-based Shack-Hartmann Wave-front Sensing: Analysis and Simulation. Appl. Opt. 2003, 42, 5807–5815. [Google Scholar] [CrossRef]
- Platt, B.C.; Shack, R. History and Principles of Shack-Hartmann Wavefront Sensing. J. Refract. Surg. 2001, 17, S573–S577. [Google Scholar] [CrossRef]
- Fienup, J.R. Reconstruction of an Object from the Modulus of Its Fourier Transform. Opt. Lett. 1978, 3, 27–29. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Sharma, M.K.; Veeraraghavan, A. WISH: Wavefront Imaging Sensor with High Resolution. Light. Sci. Appl. 2019, 8, 44. [Google Scholar] [CrossRef] [PubMed]
- Buss, S.R. Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares Methods. IEEE J. Robot. Autom. 2004, 17, 16. [Google Scholar]
- Damjanovic, D. Ferroelectric, Dielectric and Piezoelectric Properties of Ferroelectric Thin Films and Ceramics. Rep. Prog. Phys. 1998, 61, 1267. [Google Scholar] [CrossRef]
- Chandra, P.; Littlewood, P.B. A Landau Primer for Ferroelectrics. In Physics of Ferroelectrics: A Modern Perspective; Springer: Berlin/Heidelberg, Germany, 2007; pp. 69–116. [Google Scholar]
- Wang, Q.M.; Zhang, T.; Chen, Q.; Du, X.H. Effect of DC Bias Field on the Complex Materials Coefficients of Piezoelectric Resonators. Sens. Actuators Phys. 2003, 109, 149–155. [Google Scholar] [CrossRef]
- Masys, A.J.; Ren, W.; Yang, G.; Mukherjee, B.K. Piezoelectric Strain in Lead Zirconate Titante Ceramics as A Function of Electric Field, Frequency, and DC Bias. J. Appl. Phys. 2003, 94, 1155–1162. [Google Scholar] [CrossRef]
- Yang, G.; Liu, S.F.; Ren, W.; Mukherjee, B.K. Effects of Uniaxial Stress on the Piezoelectric, Dielectric, and Mechanical Properties of Lead Zirconate Titanate Piezoceramics. Ferroelectrics 2001, 262, 207–212. [Google Scholar] [CrossRef]
- Blaurock, C.; Mcginnis, M.; Kim, K.; Mosier, G.E. Structural-Thermal-Optical Performance (STOP) Sensitivity Analysis for the James Webb Space Telescope. In Proceedings of the SPIE Optics and Photonics 2005, San Diego, CA, USA, 17–19 May 2005. [Google Scholar]
- Nielsen, C.J.G.; Tian, D.; Wang, K.; Preumont, A. Adaptive Deployable Thin Spherical Shell Reflectors. Actuators 2022, 11, 198. [Google Scholar] [CrossRef]
- Mao, Y.; Jiang, B.; Du, J.; Yin, J. The Simulation Study of Thermal Design Method for Space Optical Window. In Proceedings of the 2nd International Forum of Young Scientists on Advanced Optical Manufacturing (AOMTA and YSAOM 2022), Changchun, China, 29–31 July 2022. [Google Scholar]
- Yang, H.; Shen, F.; Zhang, Z.; Chen, L.; Wu, Q. Thermal Design and Verification of the Large-temperature-difference Space Optical System. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017. [Google Scholar]
- Villalba, V.; Kuiper, H.; Gill, E. Review on Thermal and Mechanical Challenges in the Development of Deployable Space Optics. J. Astron. Telesc. Instrum. Syst. 2020, 6, 010902. [Google Scholar] [CrossRef]
- Wang, L.; Ast, D.G.; Bhargava, P.; Zehnder, A.T. Curved Silicon Electronics. MRS Online Proc. Libr. (OPL) 2003, 769. [Google Scholar] [CrossRef]
- Suzuki, S.; Matsumoto, Y. Lithography with UV-LED Array for Curved Surface Structure. Microsyst. Technol. 2008, 14, 1291–1297. [Google Scholar] [CrossRef]
- Preumont, A. Vibration Control of Active Structures, an Introduction, 4th ed.; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Wang, K.; Alaluf, D.; Rodrigues, G.; Preumont, A. Precision Shape Control of Ultra Thin Shells with Strain Actuators. J. Appl. Comput. Mech. 2021, 7, 1130–1137. [Google Scholar]
- Persson, B.N.; Albohr, O.; Tartaglino, U.; Volokitin, A.I.; Tosatti, E. On the Nature of Surface Roughness with Application to Contact Mechanics, Sealing, Rubber Friction and Adhesion. J. Phys. Condens. Matter 2004, 17, R1. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, M.; Zuo, Y.; Zheng, X. Research on Elastic Modes of Circular Deformable Mirror for Adaptive Optics and Active Optics Corrections. Opt. Express 2019, 27, 404–415. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Gere, J.M. Theory of Elastic Stability; Courier Corporation: North Chelmsford, MA, USA, 2009. [Google Scholar]
- Preumont, A. Random Vibration and Spectral Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Peña, J.M.; Sauer, T. SVD Update Methods for Large Matrices and Applications. Linear Algebra Its Appl. 2019, 561, 41–62. [Google Scholar] [CrossRef]
- Madec, P.Y. Overview of Deformable Mirror Technologies for Adaptive Optics and Astronomy. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Amsterdam, The Netherlands, 1–6 July 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature Change | Actuators Failure | ||||
|---|---|---|---|---|---|
| [] | Malfunctioning Number [/] | ||||
| −20 | 0.521 | 0.904 | 0 | 0.500 | 0.900 |
| −10 | 0.511 | 0.902 | 5 | 0.500 | 0.900 |
| 0 | 0.500 | 0.900 | >5 | >1 | |
| 10 | 0.489 | 0.898 | Complex Stress Status | ||
| 20 | 0.477 | 0.895 | Residual Stress in Layers | ||
| 30 | 0.465 | 0.893 | with Random Edge Tension | 0.526 | 0.905 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Yu, Y.; Preumont, A. Shape Control of a Unimorph Deformable Mirror for Space Active Optics under Uncertainties. Micromachines 2023, 14, 1756. https://doi.org/10.3390/mi14091756
Wang K, Yu Y, Preumont A. Shape Control of a Unimorph Deformable Mirror for Space Active Optics under Uncertainties. Micromachines. 2023; 14(9):1756. https://doi.org/10.3390/mi14091756
Chicago/Turabian StyleWang, Kainan, Yian Yu, and André Preumont. 2023. "Shape Control of a Unimorph Deformable Mirror for Space Active Optics under Uncertainties" Micromachines 14, no. 9: 1756. https://doi.org/10.3390/mi14091756