

Multi-Objective Optimization of a Long-Stroke Moving-Iron Proportional Solenoid Actuator
Abstract
:1. Introduction
2. Structure and Principle
3. Optimization Problem and Method
3.1. Optimization Problem
3.1.1. Performance Index
- (1)
- Coefficient of the variation in electromagnetic force CV(in): Based on the working range of the driving current, CV(in) is defined in Equation (1) for a typical driving current to reflect the horizontal force characteristics of the MPSA under different driving current conditions. CV(in) ≈ 0 indicates better horizontal force characteristics, whereas a larger CV(in) indicates poor horizontal force characteristics.
- (2)
- Output electromagnetic force F0.95: When the armature is in the middle working stroke of 10 mm and under the step driving voltage signal of 24 V, 95% of its maximum stable output electromagnetic force F1.00 produced by the actuator is called the output electromagnetic force F0.95 (Figure 2). A larger output electromagnetic force F0.95 indicates a stronger driving force of the MPSA.
- (3)
- Response time t0.95: When the armature is in the middle working stroke, the time required for the actuator to reach 95% of its maximum stable output electromagnetic force F1.00 under the step drive voltage signal is called the response time t0.95 (Figure 2). A smaller response time t0.95 indicates a faster response speed by the MPSA.
- (4)
- Nominal acceleration a: The ratio of the output electromagnetic force F0.95 to the mass of the moving parts of the MPSA is defined as the nominal acceleration a (Equation (2)). A larger nominal acceleration a indicates that MPSA has good acceleration performance and a high output electromagnetic force density.
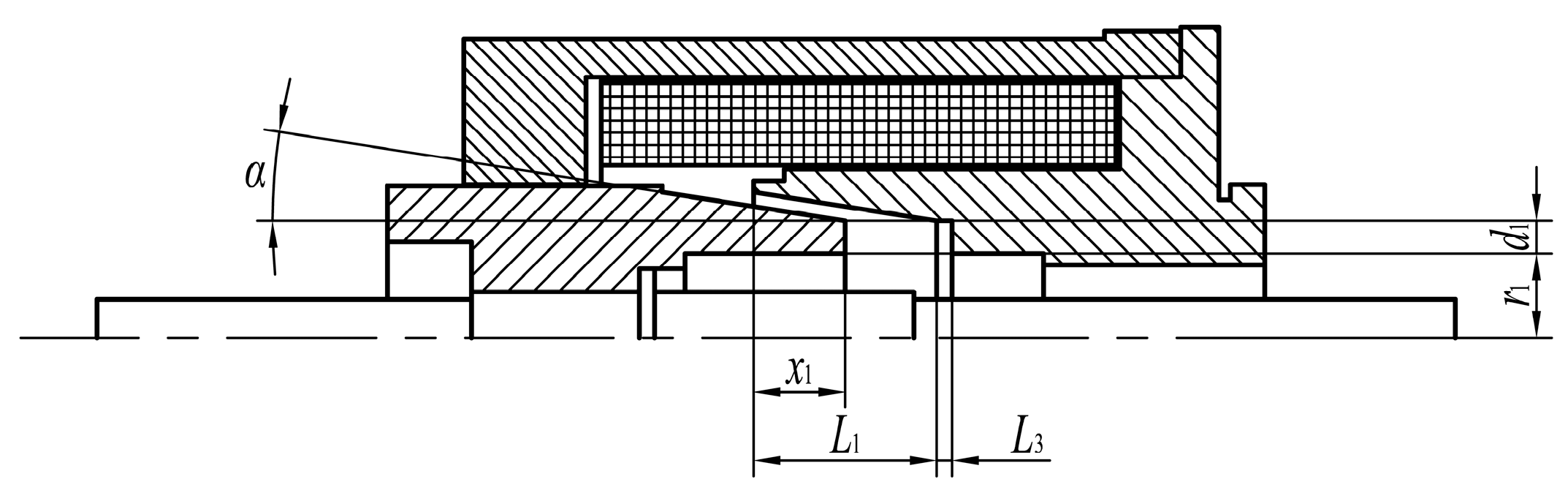
3.1.2. Design Parameters
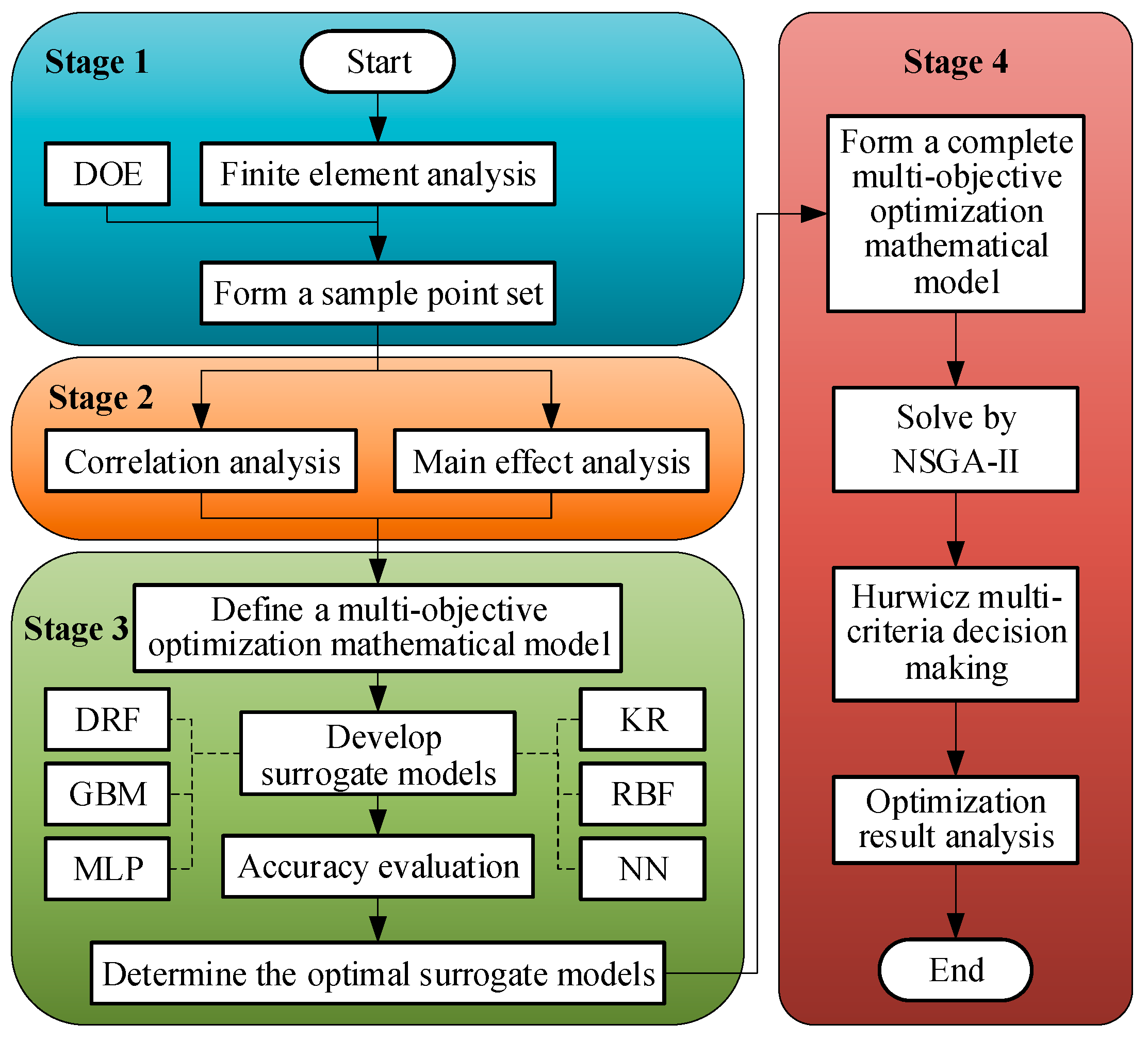
3.2. Optimization Method
4. Finite Element Model
5. Results and Discussion
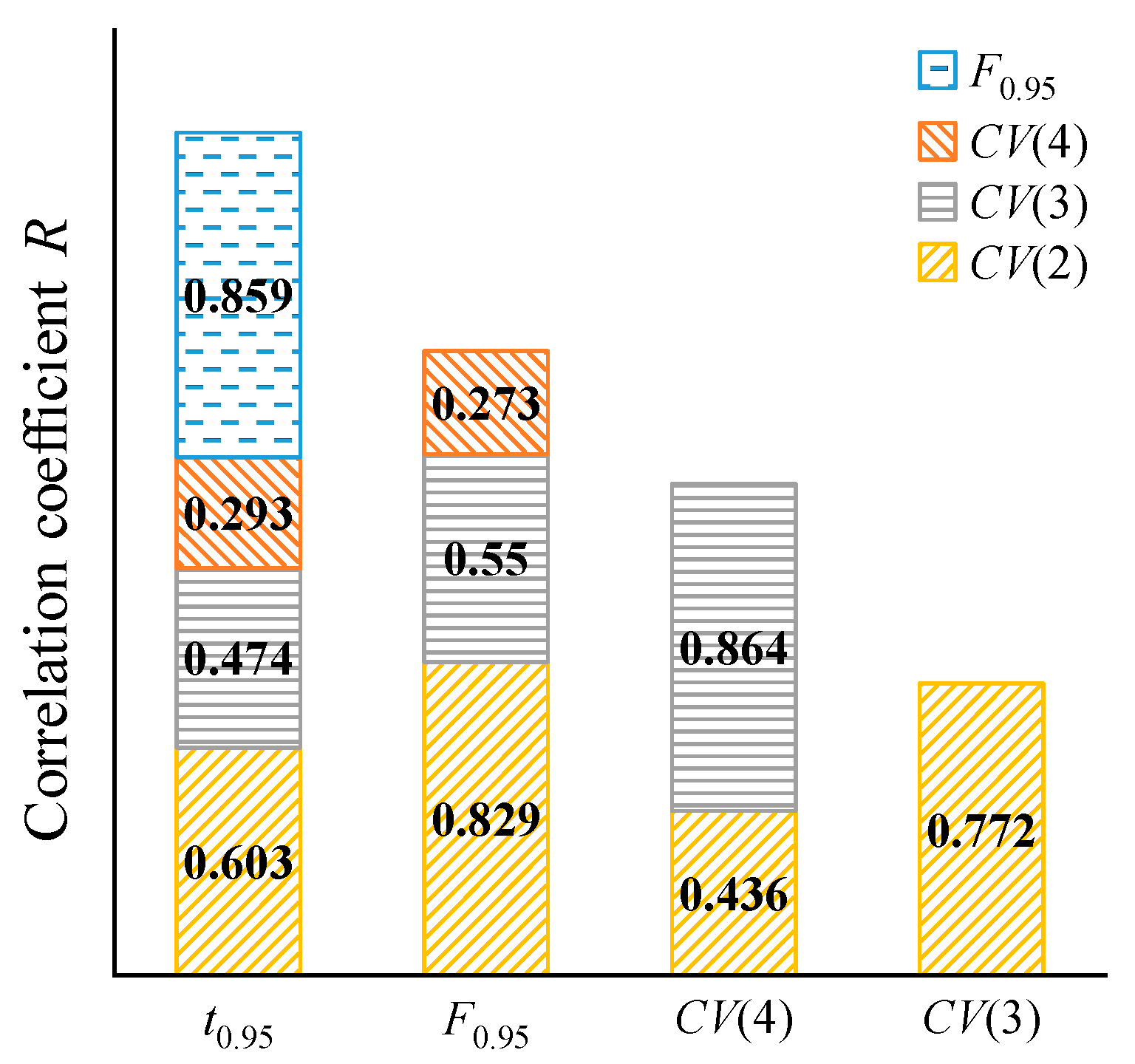
5.1. Correlation Analysis
- (1)
- The correlation coefficient of response time t0.95 and output electromagnetic force F0.95 is 0.859, indicating a strong positive correlation between them. Thus, the larger the output electromagnetic force of the MPSA is, the longer the required response time is. In practice, a larger electromagnetic force can presumably be obtained in the shortest possible response time. Therefore, the response time t0.95 and output electromagnetic force F0.95 strongly contradict each other.
- (2)
- A positive correlation exists between the output electromagnetic force F0.95 and CV(in), indicating that both these indicators proportionally increase. Thus, optimizing one indicator inevitably degrades the other. However, with an increase in the driving current, the correlation coefficient decreases from 0.829 to 0.273 and changes from a strong correlation to a weak correlation. So the contradiction weakens.
- (3)
- The correlation coefficient between different CV(in) ranges from 0.436 to 0.864, showing a significant positive correlation. This indicates that the horizontal force characteristics under each driving current have different degrees of coupling relation; they simultaneously increase and decrease, which is conducive to improving the horizontal force characteristic for each driving current.
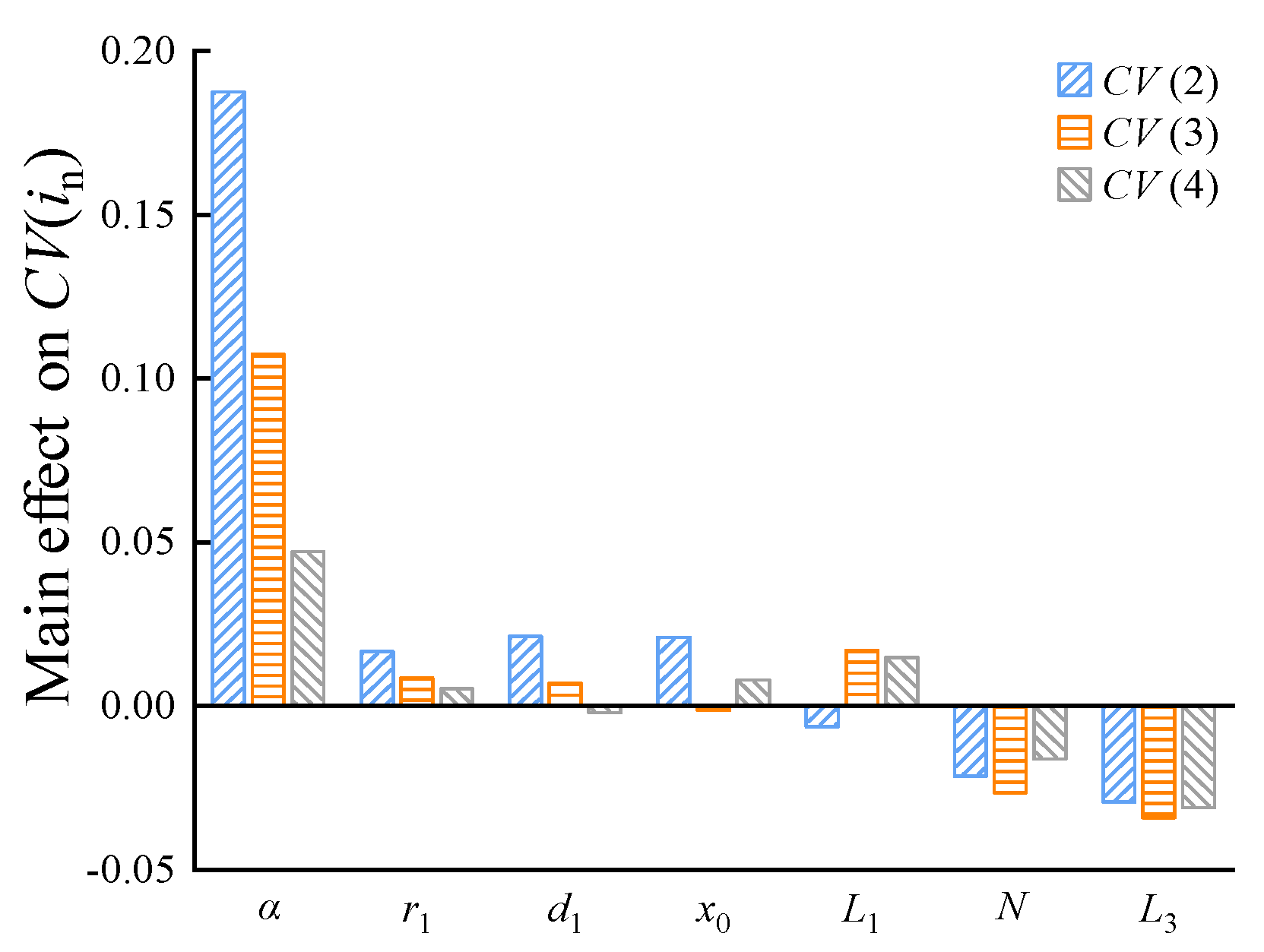
5.2. Main Effect Analysis
5.2.1. Main Effect on the Horizontal Force Characteristics
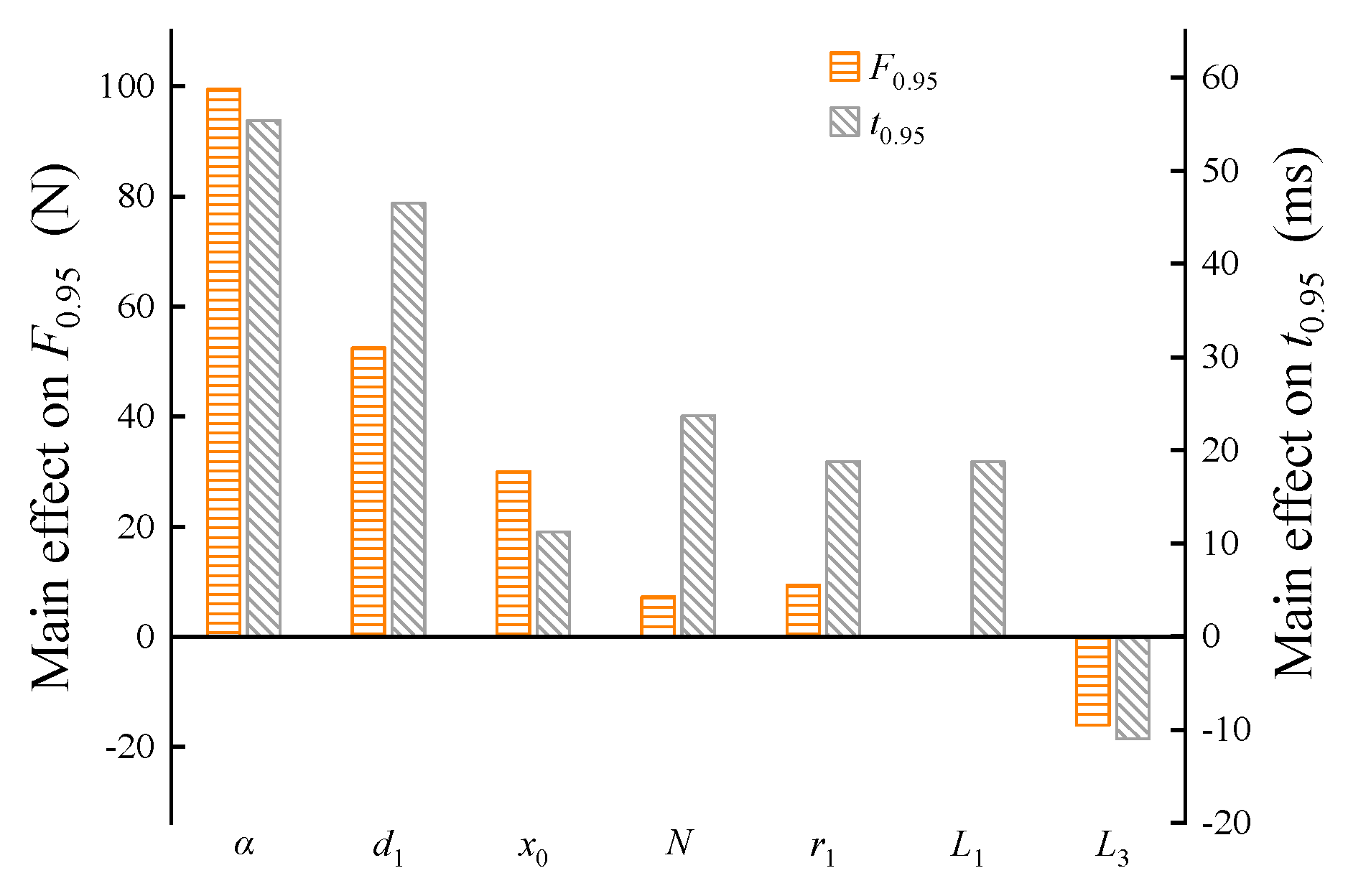
5.2.2. Main Effect on the Output Electromagnetic Force and Its Response Time
5.3. Multi-Objective Optimization
5.3.1. Development of the Multi-Objective Optimization Mathematical Model
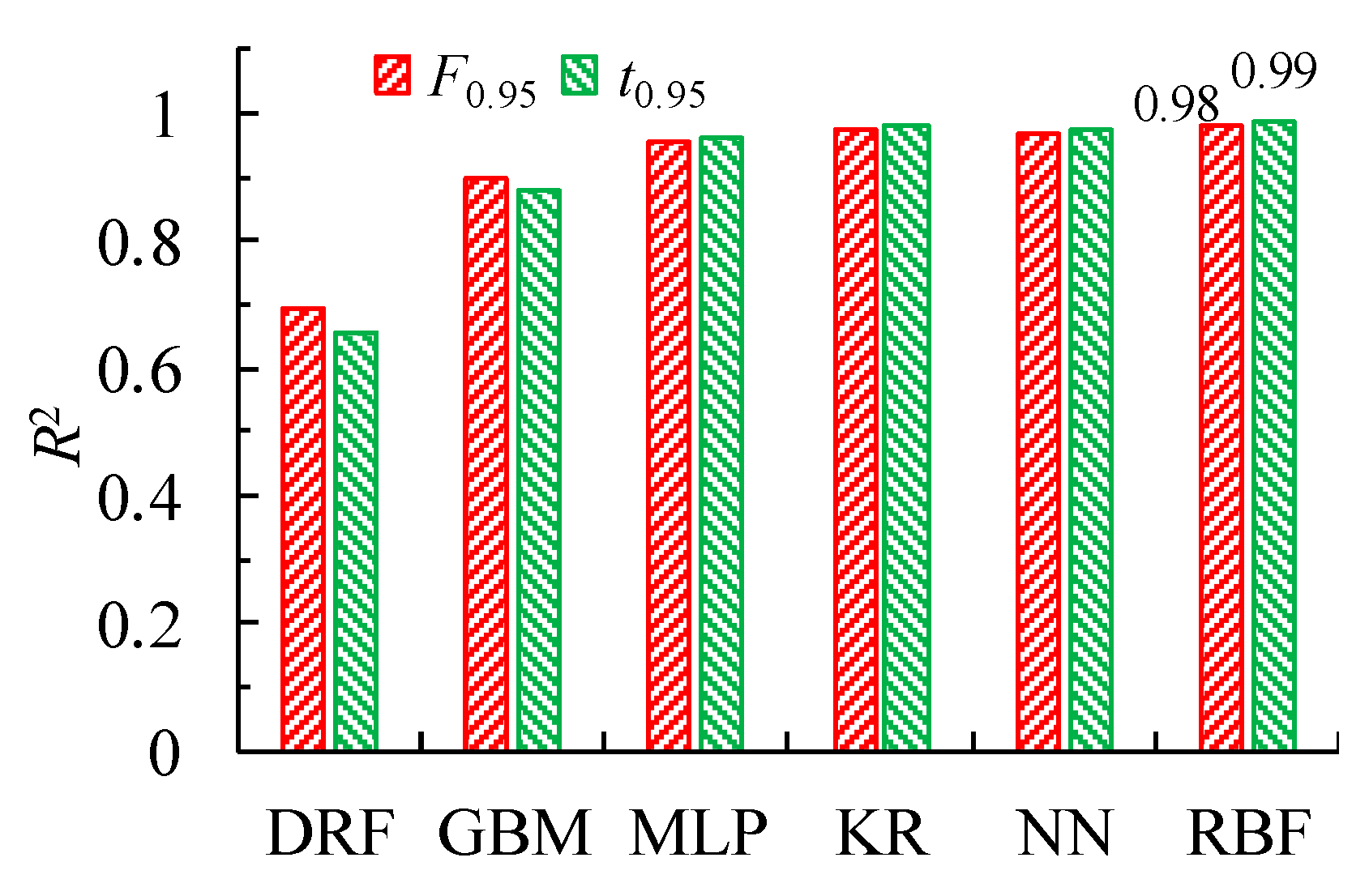
5.3.2. Development of the Optimal Surrogate Model
5.3.3. Solution and Analysis of the Multi-Objective Optimization Mathematical Model
6. Conclusions
- (1)
- There exists a pronounced contradiction between the output electromagnetic force F0.95 and the response time t0.95, as indicated by a correlation coefficient of 0.859. Similarly, a significant contradiction is observed between the output electromagnetic force F0.95 and CV(in), with a correlation coefficient ranging from 0.293 to 0.603. Moreover, a robust coupling relationship is discernible among CV(2), CV(3), and CV(4), as evidenced by a correlation coefficient spanning from 0.436 to 0.864.
- (2)
- α has the most significant positive main effect on CV(in). N and L3 have obvious negative main effects on CV(in). The main effect of α and d1 on the output electromagnetic force F0.95 and response time t0.95 is strong, and the influence directions are the same. This indicates that the optimization of the long-stroke MPSA presents a robust nonlinear challenge.
- (3)
- The MLP and RBF models are recommended for constructing the multi-objective optimization mathematical model of the long-stroke MPSA. Its optimal solution is solved using NSGA-II and determined using the Hurwicz criterion. The results show that CV(in)a for the optimistic decision design decreased by 54.08%, response time t0.95 for the critical decision design decreased by 15.65%, and a for the pessimistic decision design increased by 10.32%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lankin, M.V.; Lozin, O.I.; Lankina, M.Y. Magnetization dynamic characteristics models for hydraulic drives of proportional electromagnets. Procedia Eng. 2017, 206, 443–448. [Google Scholar] [CrossRef]
- Park, C.; Lim, B.; Chung, K. Design verification methodology for a solenoid valve for industrial applications. J. Mech. Sci. Technol. 2015, 29, 677–686. [Google Scholar] [CrossRef]
- Lee, J.; Yun, Y.; Hong, H.; Park, M. Control of spool position of on/off solenoid operated hydraulic valve by sliding-mode controller. J. Mech. Sci. Technol. 2015, 29, 5395–5408. [Google Scholar] [CrossRef]
- Yun, S.; Ryu, J.S.; Ahn, B.K.; Kim, G.D.; Jo, J.H. Electrohydraulic proportional metering valve for common rail system. Proc. JFPS Int. Symp. Fluid Power 2005, 2005, 269–274. [Google Scholar] [CrossRef]
- Chen, C.; Chiang, M. Development of proportional pressure control valve for hydraulic braking actuator of automobile ABS. Appl. Sci. 2018, 8, 639. [Google Scholar] [CrossRef]
- Meng, F.; Tao, G.; Luo, P.P. Dynamic analysis of proportional solenoid for automatic transmission applications. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 1120–1124. [Google Scholar]
- Riahi, M.; Sedighi, M.; Rahmanian, H. Investigation of magnetic actuator as a hammer in metal forming. Int. J. Adv. Manuf. Technol. 2016, 85, 1117–1124. [Google Scholar] [CrossRef]
- Lee, G. Design improvement of a linear control solenoid valve using mul-tiphysics simulation. Mechanika 2018, 24, 352–359. [Google Scholar] [CrossRef]
- Bayat, F.; Fadaie Tehrani, A.; Danesh, M. Finite element analysis of proportional solenoid characteristics in hydraulic valves. Int. J. Automot. Technol. 2012, 13, 809–816. [Google Scholar] [CrossRef]
- Lee, G.S.; Sung, H.J.; Kim, H.C. Multiphysics analysis of a linear control solenoid valve. J. Fluids Eng. 2013, 135, 011104. [Google Scholar] [CrossRef]
- Arakawa, T.; Niimi, S. Optimization technology of magnetic circuit for linear solenoid. In Proceedings of the SAE 2002 World Congress, Detroit, MI, USA, 4–7 March 2002; pp. 1–7. [Google Scholar]
- Lequesne, B.P. Finite-element analysis of a constant-force solenoid for fluid flow control. IEEE Trans. Ind. Appl. 1988, 24, 574–581. [Google Scholar] [CrossRef]
- Yamada, H.; Kihara, S.; Yamaguchi, M.; Nakagawa, H.; Hagiwara, K. Static thrust improvement of a linear proportional solenoid. IEEE Transl. J. Magn. Jpn. 1994, 9, 117–121. [Google Scholar] [CrossRef]
- Xie, H.B.; Lv, Z.; Yang, H.; Zhen, Y.; Zhang, J. Static and dynamic performance research on proportional solenoid. In Proceedings of the International Conference on Mechanic Automation and Control Engineering (MACE 2010), Wuhan, China, 26–28 June 2010; pp. 5952–5955. [Google Scholar]
- Yuan, X.; Ling, H.; Qiu, T.; Zhou, J.; Zhao, R. Optimization for a proportional electro-magnet with high accuracy utilizing finite element method. Int. J. Appl. Electromagn. Mech. 2021, 65, 267–280. [Google Scholar] [CrossRef]
- Yun, S.; Ham, Y.; Park, J. New approach to design control cone for Electro-Magnetic proportional solenoid actuator. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Taiwan, China, 11–14 July 2012; pp. 2159–6255. [Google Scholar]
- Yun, S.; Ham, Y.; Park, J. Attraction force improvement strategy of a proportional solenoid actuator for hydraulic pressure control valve. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems, Jeju Island, Republic of Korea, 17–21 October 2012; pp. 1123–1127. [Google Scholar]
- Yu, Y.X.; Ke, S.D.; Jin, K.D. Structural parameters optimization for a proportional solenoid. Int. J. Simul. Model. 2020, 19, 689–700. [Google Scholar] [CrossRef]
- Wang, S.J.; Weng, Z.D.; Jin, B. Multi-objective optimization of linear proportional solenoid actuator. Appl. Comput. Electromagn. Soc. J. 2020, 35, 1338–1339. [Google Scholar] [CrossRef]
- Wang, S.J.; Weng, Z.D.; Jin, B.; Cai, H.X. Multi-objective genetic algorithm optimization of linear proportional solenoid actuator. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 60. [Google Scholar] [CrossRef]
- Liu, X.L.; Chen, Y.W.; Jing, X.R.; Chen, Y.G. Optimized latin hypercube sampling method and its application. J. Natl. Univ. Def. Technol. 2011, 35, 73–77. [Google Scholar]
- Mckay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Pan, X.; Sun, D.; Liu, Y.Q.; Fan, Y.; Liu, J. Transient stability uncertainty analysis of power system with wind power based on kriging surrogate model. Proc. CSEE 2015, 35, 1853–1863. [Google Scholar]
- Zerpa, L.E.; Queipo, N.V.; Pintos, S.; Salager, J. An optimization methodology of alkaline–surfactant–polymer flooding processes using field scale numerical simulation and multiple surrogates. J. Pet. Sci. Eng. 2005, 47, 197–208. [Google Scholar] [CrossRef]
- Marugán, A.P.; Márquez, F.P.G.; Perez, J.M.P.; Ruiz-Hernández, D. A survey of artificial neural network in wind energy systems. Appl. Energy 2018, 228, 1822–1836. [Google Scholar] [CrossRef]
- Chen, X.; Ishwaran, H. Random forests for genomic data analysis. Genomics 2012, 99, 323–329. [Google Scholar] [CrossRef] [PubMed]
- Probst, P.; Wright, M.N.; Boulesteix, A.L. Hyperparameters and tuning strategies for random forest. WIREs Data Min. Knowl. Discov. 2019, 9, e1301. [Google Scholar] [CrossRef]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic generalization of On-Line learning and an application to boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef]
- Schapire, R.E. The boosting approach to machine learning: An overview. MSRI Workshop Nonlinear Estim. Classif. 2002, 171, 149–171. [Google Scholar]
- Basheer, I.A.; Hajmeer, M. Artificial neural networks: Fundamentals, computing, design, and application. J. Microbiol. Methods 2000, 43, 3–31. [Google Scholar] [CrossRef] [PubMed]
- Chung, E.; Kim, Y. Development of fuzzy multi-criteria approach to prioritize locations of treated wastewater use considering climate change scenarios. J. Environ. Manag. 2014, 146, 505–516. [Google Scholar] [CrossRef]
- Lan, Q.; Fan, L.; Bai, Y.; Gu, Y.; Wen, L. Correlation analysis upon the influential factors related to the dynamic response characteristics of pressure amplification piston in the fuel system for a low-speed diesel engine. Fuel 2020, 276, 118052. [Google Scholar] [CrossRef]
- Gaspars-Wieloch, H. Modifications of the Hurwicz’s decision rule. Cent. Eur. J. Oper. Res. 2014, 22, 779–794. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Turskis, Z.; Kildienė, S. State of art surveys of overviews on MCDM/MADM methods. Technol. Econ. Dev. Econ. 2014, 20, 165–179. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Range |
|---|---|
| cone angle α (degree) | 3–15 |
| cone length L1 (mm) | 20–32 |
| inner hole depth of coil skeleton L3 (mm) | 0–6 |
| coil turns N | 450–750 |
| cone width d1 (mm) | 1.25–7.25 |
| cone inner diameter r1 (mm) | 10–16 |
| armature initial position x0 (mm) | −4–8 |
| Correlation Strength | Absolute Values of Correlation Coefficient |
|---|---|
| low | 0–0.3 |
| medium | 0.3–0.6 |
| high | 0.6–1 |
| F(in, xm) | F(in,5) | F(in,6) | F(in,7) | F(in,8) |
| in (A) | ||||
| 2 | MLP | MLP | MLP | MLP |
| 3 | KR | KR | RBF | RBF |
| 4 | RBF | RBF | RBF | RBF |
| F(in, xm) | F(in,9) | F(in,10) | F(in,11) | F(in,12) |
| in (A) | ||||
| 2 | RBF | MLP | RBF | RBF |
| 3 | RBF | RBF | RBF | RBF |
| 4 | RBF | KR | KR | RBF |
| F(in, xm) | F(in,13) | F(in,14) | F(in,15) | - |
| in (A) | ||||
| 2 | MLP | MLP | MLP | - |
| 3 | RBF | RBF | RBF | - |
| 4 | RBF | RBF | RBF | - |
| Design Parameters | α/deg | L1/mm | L3/mm | N | d1/mm | r1/mm | x0/mm | |||
|---|---|---|---|---|---|---|---|---|---|---|
| initial | 8.88 | 24 | 0 | 590 | 4.25 | 11 | 2 | |||
| optimized | optimistic decision (λ = 0) | 8.92 | 20.00 | 4.25 | 671 | 4.65 | 10.00 | 1.43 | ||
| critical decision (λ = 0.5) | 8.64 | 20.01 | 3.09 | 561 | 4.46 | 10.02 | 1.60 | |||
| pessimistic decision (λ = 1) | 8.91 | 20.00 | 3.18 | 628 | 4.39 | 10.00 | 2.03 | |||
| Performance Index | CV(in)a | t0.95/ms | a/(m/s2) | |||||||
| initial | 0.098 | 0.115 | 240.28 | |||||||
| optimized | optimistic decision (λ = 0) | 0.045 | 0.113 | 260.45 | ||||||
| critical decision (λ = 0.5) | 0.064 | 0.097 | 255.56 | |||||||
| pessimistic decision (λ = 1) | 0.055 | 0.106 | 265.08 | |||||||
| rate of change (%) | optimistic decision (λ = 0) | −54.08 | −1.74 | 8.39 | ||||||
| critical decision (λ = 0.5) | −34.69 | −15.65 | 6.36 | |||||||
| pessimistic decision (λ = 1) | −43.88 | −7.83 | 10.32 | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Ouyang, Y.; Quan, W. Multi-Objective Optimization of a Long-Stroke Moving-Iron Proportional Solenoid Actuator. Micromachines 2024, 15, 58. https://doi.org/10.3390/mi15010058
Liu P, Ouyang Y, Quan W. Multi-Objective Optimization of a Long-Stroke Moving-Iron Proportional Solenoid Actuator. Micromachines. 2024; 15(1):58. https://doi.org/10.3390/mi15010058
Chicago/Turabian StyleLiu, Peng, Yuwen Ouyang, and Wenwen Quan. 2024. "Multi-Objective Optimization of a Long-Stroke Moving-Iron Proportional Solenoid Actuator" Micromachines 15, no. 1: 58. https://doi.org/10.3390/mi15010058