
Nonlinearity-Induced Asymmetric Synchronization Region in Micromechanical Oscillators
 , and
, and
Abstract
1. Introduction
2. Materials and Methods
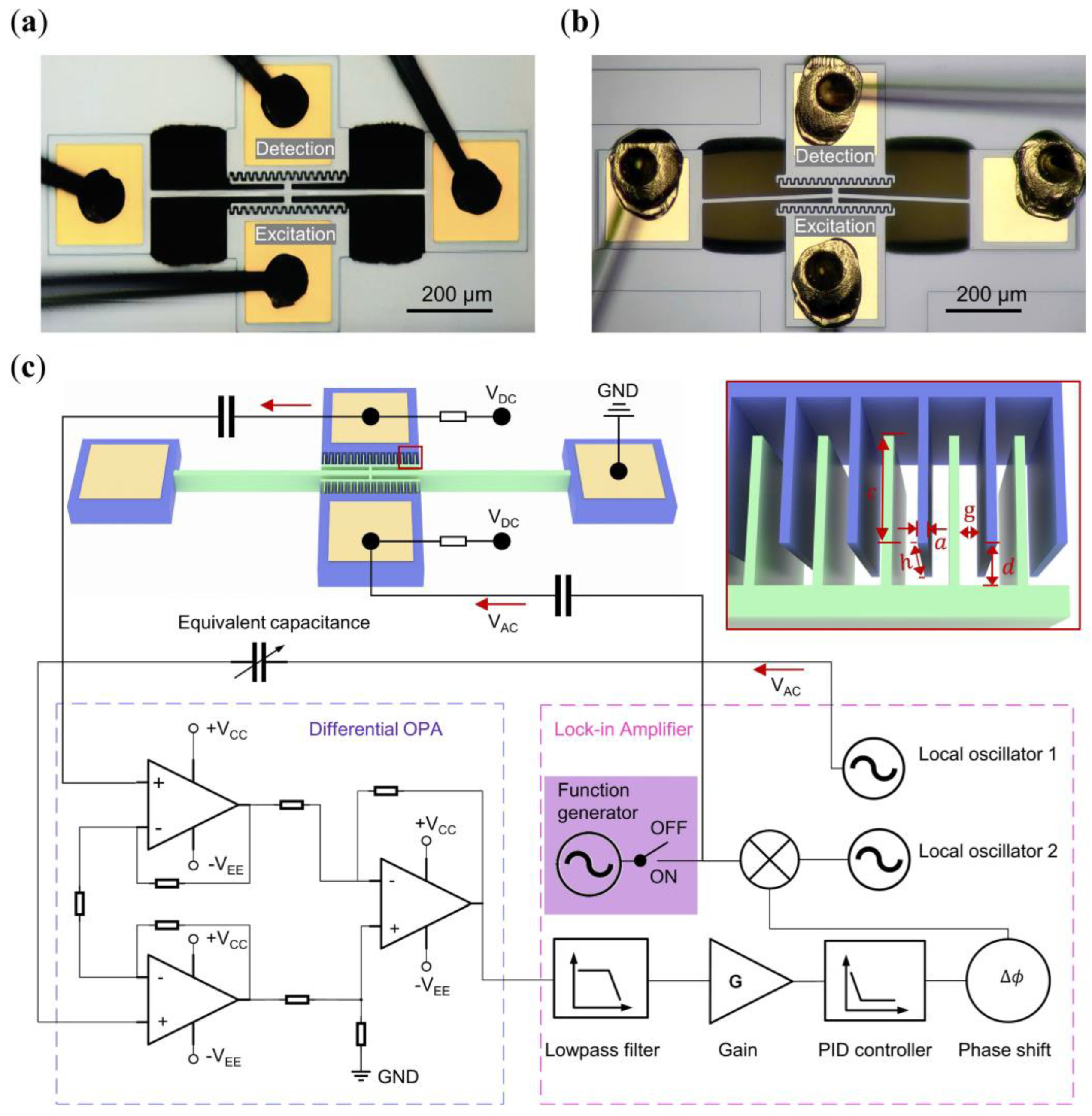
2.1. Device Characteristics
2.2. Excitation and Signal Processing Setup
2.3. Establishment and Measurement of Synchronization
3. Results
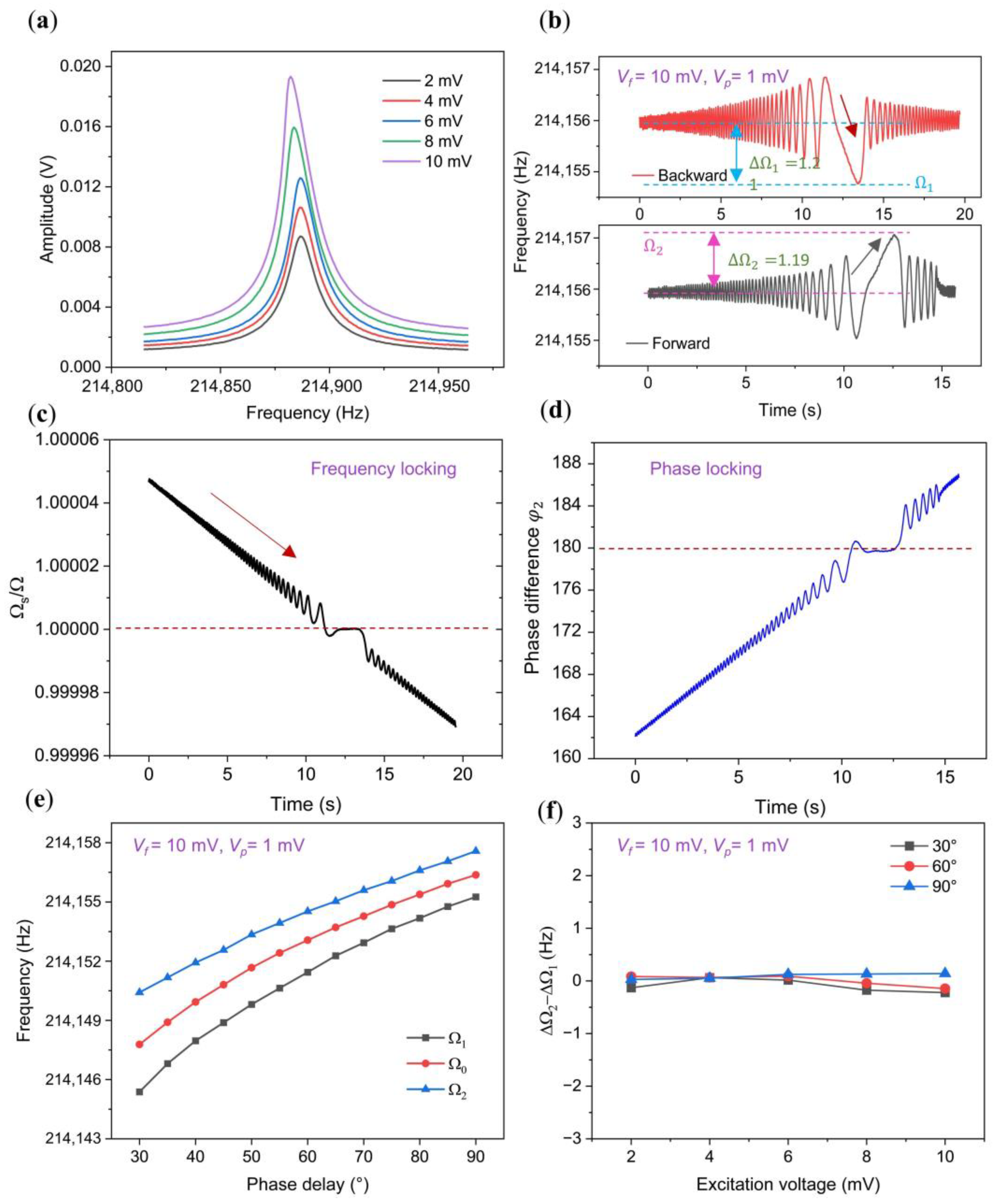
3.1. Synchronization Region of the Linear Oscillator
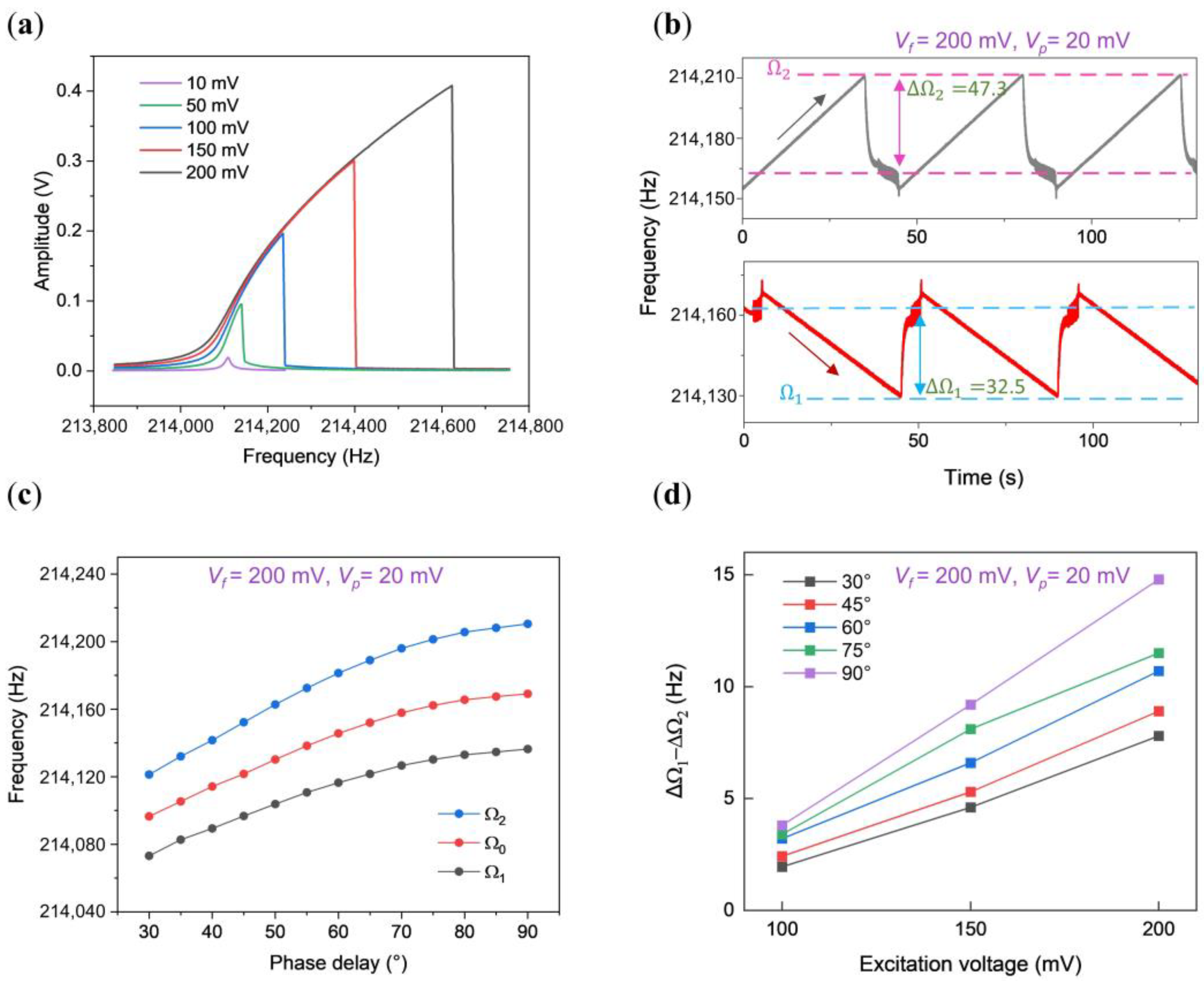
3.2. Synchronization Region of the Hardening Oscillator
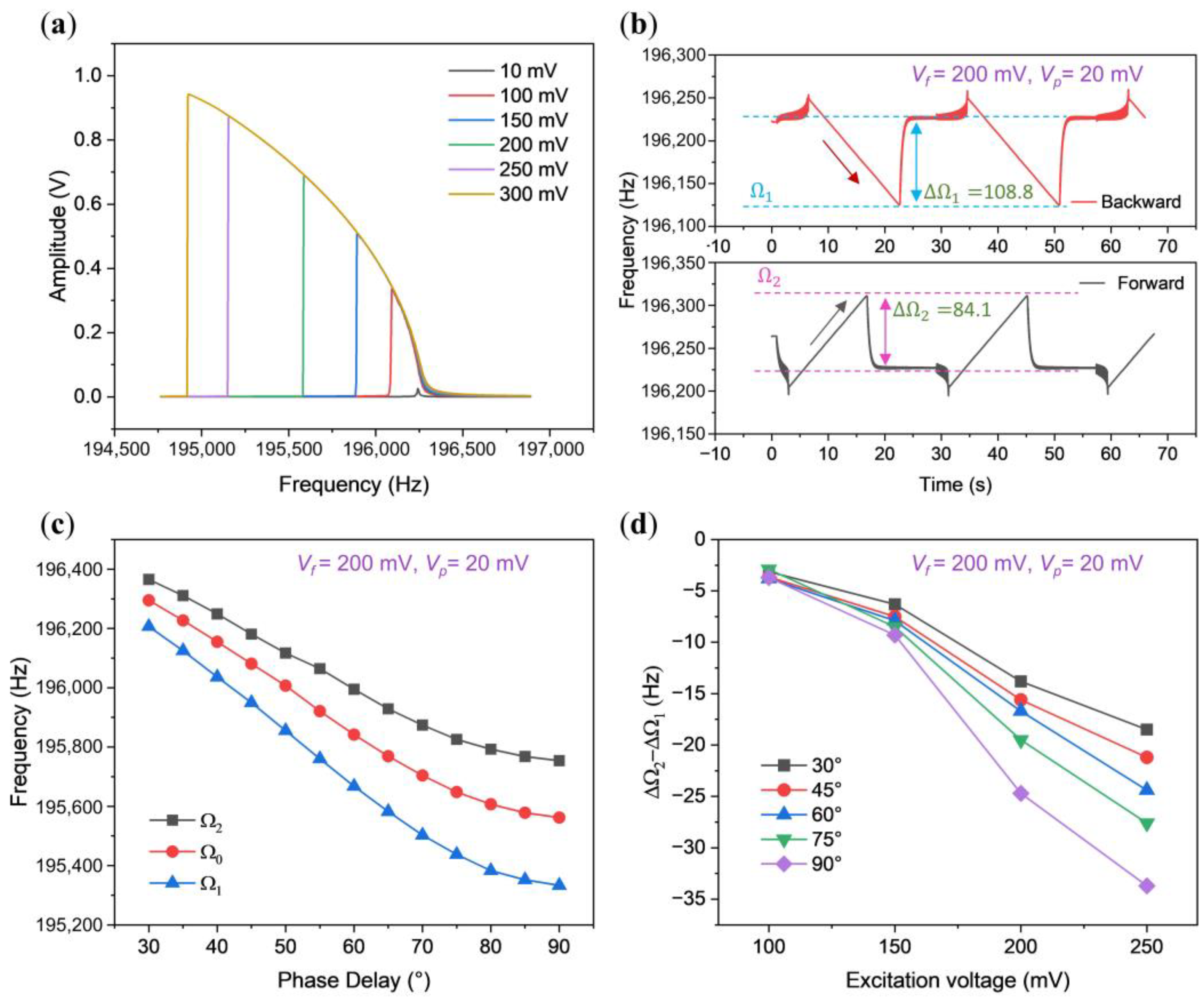
3.3. Synchronization Region of the Softening Oscillator
4. Theoretical Modeling
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Notation | Description |
| Experimental | |
| Young’s modulus | |
| Moment inertia | |
| Mass density | |
| S | Cross section area |
| Length of the beam | |
| DC bias voltage in the open-loop and closed-loop experiments | |
| Driving alternative voltage in the open-loop experiments | |
| Feedback sustaining voltage in the closed-loop experiments | |
| Perturbation voltage in the closed-loop experiments | |
| Lower limit of the synchronization region | |
| Upper limit of the synchronization region | |
| Upper synchronization bandwidth | |
| Lower synchronization bandwidth | |
| Theoretical modeling | |
| Normalized quadratic nonlinear coefficient | |
| Normalized cubic nonlinear coefficient | |
| Instantaneous phase | |
| Phase delay between the perturbation and the self-oscillation oscillator | |
| Instantaneous frequency of the oscillator | |
| Self-oscillation frequency of the oscillator without perturbation | |
| Normalized feedback strength | |
| Normalized perturbation strength | |
| Initial phase of the oscillator | |
| Normalized natural frequency | |
| Normalized self-oscillation frequency | |
| Perturbated frequency of the oscillator | |
| Infinitesimal | |
| Frequency difference between the self-oscillation frequency and the natural frequency | |
| Frequency difference between the perturbation frequency and the natural frequency | |
| Phase difference between the perturbation and the oscillator |
References
- Koppenhöfer, M.; Bruder, C.; Roulet, A. Quantum synchronization on the IBM Q system. Phys. Rev. Res. 2020, 2, 023026. [Google Scholar] [CrossRef]
- Qiao, G.J.; Gao, H.X.; Liu, H.D.; Yi, X.X. Quantum synchronization of two mechanical oscillators in coupled optomechanical systems with Kerr nonlinearity. Sci. Rep. 2018, 8, 15614. [Google Scholar] [CrossRef]
- Bagheri, M.; Poot, M.; Fan, L.; Marquardt, F.; Tang, H.X. Photonic Cavity Synchronization of Nanomechanical Oscillators. Phys. Rev. Lett. 2013, 111, 213902. [Google Scholar] [CrossRef]
- Zheng, Z.; Hu, G.; Hu, B. Phase Slips and Phase Synchronization of Coupled Oscillators. Phys. Rev. Lett. 1998, 81, 5318–5321. [Google Scholar] [CrossRef]
- Shim, S.-B.; Imboden, M.; Mohanty, P. Synchronized Oscillation in Coupled Nanomechanical Oscillators. Science 2007, 316, 95–99. [Google Scholar] [CrossRef]
- Calugaru, D.; Totz, J.F.; Martens, E.A.; Engel, H. First-order synchronization transition in a large population of strongly coupled relaxation oscillators. Sci. Adv. 2020, 6, eabb2637. [Google Scholar] [CrossRef]
- Dong, M.; Boyle, J.M.; Palm, K.J.; Zimmermann, M.; Witte, A.; Leenheer, A.J.; Dominguez, D.; Gilbert, G.; Eichenfield, M.; Englund, D. Synchronous micromechanically resonant programmable photonic circuits. Nat. Commun. 2023, 14, 7716. [Google Scholar] [CrossRef]
- Sarfati, R.; Hayes, J.C.; Peleg, O. Self-organization in natural swarms of Photinus carolinus synchronous fireflies. Sci. Adv. 2021, 7, eabg9259. [Google Scholar] [CrossRef] [PubMed]
- Vicsek, T.; Zafeiris, A. Collective motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Zhang, Z.; Sukhov, A.; Harting, J.; Malgaretti, P.; Ahmed, D. Rolling microswarms along acoustic virtual walls. Nat. Commun. 2022, 13, 7347. [Google Scholar] [CrossRef]
- Han, K.; Kokot, G.; Das, S.; Winkler, R.G.; Gompper, G.; Snezhko, A. Reconfigurable structure and tunable transport in synchronized active spinner materials. Sci. Adv. 2020, 6, eaaz8535. [Google Scholar] [CrossRef] [PubMed]
- Yoder, J.G. Christiaan Huygens, book on the pendulum clock (1673). In Landmark Writings in Western Mathematics 1640–1940; Elsevier Science: Amsterdam, The Netherlands, 2005; pp. 33–45. [Google Scholar]
- Agrawal, D.K.; Woodhouse, J.; Seshia, A.A. Observation of Locked Phase Dynamics and Enhanced Frequency Stability in Synchronized Micromechanical Oscillators. Phys. Rev. Lett. 2013, 111, 084101. [Google Scholar] [CrossRef] [PubMed]
- Awad, A.A.; Durrenfeld, P.; Houshang, A.; Dvornik, M.; Iacocca, E.; Dumas, R.K.; Akerman, J. Long-range mutual synchronization of spin Hall nano-oscillators. Nat. Phys. 2017, 13, 292–299. [Google Scholar] [CrossRef]
- Cross, M.C.; Zumdieck, A.; Lifshitz, R.; Rogers, J.L. Synchronization by Nonlinear Frequency Pulling. Phys. Rev. Lett. 2004, 93, 224101. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Soskin, S.M.; Khovanov, I.A.; Mannella, R.; Ninios, K.; Chan, H.B. Frequency stabilization and noise-induced spectral narrowing in resonators with zero dispersion. Nat. Commun. 2019, 10, 3930. [Google Scholar] [CrossRef] [PubMed]
- Zanette, D.H. Frequency stabilization by synchronization of Duffing oscillators. EPL Europhys. Lett. 2016, 115, 20009. [Google Scholar] [CrossRef]
- Pandey, M.; Aubin, K.; Zalalutdinov, M.; Reichenbach, R.B.; Zehnder, A.T.; Rand, R.H.; Craighead, H.G. Analysis of Frequency Locking in Optically Driven MEMS Resonators. J. Microelectromech. Syst. 2006, 15, 1546–1554. [Google Scholar] [CrossRef]
- Zhou, X.; Zhao, C.; Xiao, D.; Sun, J.; Sobreviela, G.; Gerrard, D.D.; Chen, Y.; Flader, I.; Kenny, T.W.; Wu, X.; et al. Dynamic modulation of modal coupling in microelectromechanical gyroscopic ring resonators. Nat. Commun. 2019, 10, 4980. [Google Scholar] [CrossRef]
- Miao, T.; Zhou, X.; Wu, X.; Li, Q.; Hou, Z.; Hu, X.; Wang, Z.; Xiao, D. Nonlinearity-mediated digitization and amplification in electromechanical phonon-cavity systems. Nat. Commun. 2022, 13, 2352. [Google Scholar] [CrossRef]
- Yang, F.; Fu, M.; Bosnjak, B.; Blick, R.H.; Jiang, Y.; Scheer, E. Mechanically Modulated Sideband and Squeezing Effects of Membrane Resonators. Phys. Rev. Lett. 2021, 127, 184301. [Google Scholar] [CrossRef]
- Zlotnik, A.; Nagao, R.; Kiss, I.Z.; Li, J.S. Phase-selective entrainment of nonlinear oscillator ensembles. Nat. Commun. 2016, 7, 10788. [Google Scholar] [CrossRef]
- Shi, Z.; Pu, D.; Wang, X.; Wei, X.; Huan, R. Synchronization process expediting in nonlinear oscillators via reconfiguration of the potential well pattern. Int. J. Mech. Sci. 2023, 260, 108642. [Google Scholar] [CrossRef]
- Pu, D.; Yang, P.; Wang, X.; Huan, R.; Jiang, Z.; Wei, X. Anomalous amplitude-frequency dependence in a micromechanical resonator under synchronization. Nonlinear Dyn. 2021, 103, 467–479. [Google Scholar] [CrossRef]
- Antonio, D.; Czaplewski, D.A.; Guest, J.R.; López, D.; Arroyo, S.I.; Zanette, D.H. Nonlinearity-Induced Synchronization Enhancement in Micromechanical Oscillators. Phys. Rev. Lett. 2015, 114, 034103. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Pu, D.; Wang, X.F.; Huan, R.H.; Jiang, Z.D.; Wei, X.Y. Phase-delay induced variation of synchronization bandwidth and frequency stability in a micromechanical oscillator. Nonlinear Dyn. 2021, 105, 2981–2994. [Google Scholar] [CrossRef]
- Shi, Z.; Pu, D.; Lv, Q.; Huan, R.; Wang, X.; Xiao, Z.; Jiang, Z.; Wei, X. Enhancement of synchronization bandwidth in an arch beam. J. Sound. Vib. 2023, 545, 117415. [Google Scholar] [CrossRef]
- Rodrigues, C.C.; Kersul, C.M.; Primo, A.G.; Lipson, M.; Alegre, T.P.M.; Wiederhecker, G.S. Optomechanical synchronization across multi-octave frequency spans. Nat. Commun. 2021, 12, 5625. [Google Scholar] [CrossRef]
- Martineau, S.; Saffold, T.; Chang, T.T.; Ronellenfitsch, H. Enhancing Synchronization by Optimal Correlated Noise. Phys. Rev. Lett. 2022, 128, 098301. [Google Scholar] [CrossRef]
- Yu, W.; Cao, J. Adaptive synchronization and lag synchronization of uncertain dynamical system with time delay based on parameter identification. Phys. A 2007, 375, 467–482. [Google Scholar] [CrossRef]
- Lerner, G.; Neufeld, O.; Hareli, L.; Shoulga, G.; Bordo, E.; Fleischer, A.; Podolsky, D.; Bahabad, A.; Cohen, O. Multiscale dynamical symmetries and selection rules in nonlinear optics. Sci. Adv. 2023, 9, eade0953. [Google Scholar] [CrossRef]
- Wang, X.F.; Yang, Q.Q.; Shi, Z.; Huan, R.H.; Zhu, W.Q.; Jing, X.J.; Deng, Z.C.; Wei, X.Y. Frequency comb in a parametrically modulated micro-resonator. Acta Mech. Sin. 2022, 38, 521596. [Google Scholar] [CrossRef]
- Kim, B.Y.; Jang, J.K.; Okawachi, Y.; Ji, X.; Lipson, M.; Gaeta, A.L. Synchronization of nonsolitonic Kerr combs. Sci. Adv. 2021, 7, eabi4362. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Wiederhecker, G.S.; Manipatruni, S.; Barnard, A.; McEuen, P.; Lipson, M. Synchronization of Micromechanical Oscillators Using Light. Phys. Rev. Lett. 2012, 109, 233906. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.E.Y.; Seshia, A.A. Parasitic feedthrough cancellation techniques for enhanced electrical characterization of electrostatic microresonators. Sens. Actuators A Phys. 2009, 156, 36–42. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M.; Sykes, J.B.; Bell, J.S.; Rose, M.E. Quantum Mechanics, Non-Relativistic Theory: Vol. 3 of Course of Theoretical Physics. Phys. Today 1958, 11, 56–59. [Google Scholar] [CrossRef]
- Hajjaj, A.Z.; Ramini, A.; Alcheikh, N.; Younis, M.I. Electrothermally Tunable Arch Resonator. J. Microelectromech. Syst. 2017, 26, 837–845. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam | Length | Width | Thickness | Arch Height |
|---|---|---|---|---|
| straight beam Rs | 482 μm | 12 μm | 25 μm | |
| arch beam Ra | 640 μm | 5 μm | 25 μm | 7 μm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Qin, B.; Shi, Z.; Wang, X.; Lv, Q.; Wei, X.; Huan, R. Nonlinearity-Induced Asymmetric Synchronization Region in Micromechanical Oscillators. Micromachines 2024, 15, 238. https://doi.org/10.3390/mi15020238
Liu Z, Qin B, Shi Z, Wang X, Lv Q, Wei X, Huan R. Nonlinearity-Induced Asymmetric Synchronization Region in Micromechanical Oscillators. Micromachines. 2024; 15(2):238. https://doi.org/10.3390/mi15020238
Chicago/Turabian StyleLiu, Zhonghua, Bingchan Qin, Zhan Shi, Xuefeng Wang, Qiangfeng Lv, Xueyong Wei, and Ronghua Huan. 2024. "Nonlinearity-Induced Asymmetric Synchronization Region in Micromechanical Oscillators" Micromachines 15, no. 2: 238. https://doi.org/10.3390/mi15020238
APA StyleLiu, Z., Qin, B., Shi, Z., Wang, X., Lv, Q., Wei, X., & Huan, R. (2024). Nonlinearity-Induced Asymmetric Synchronization Region in Micromechanical Oscillators. Micromachines, 15(2), 238. https://doi.org/10.3390/mi15020238