Residual Vibration Suppression of Piezoelectric Inkjet Printing Based on Particle Swarm Optimization Algorithm

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
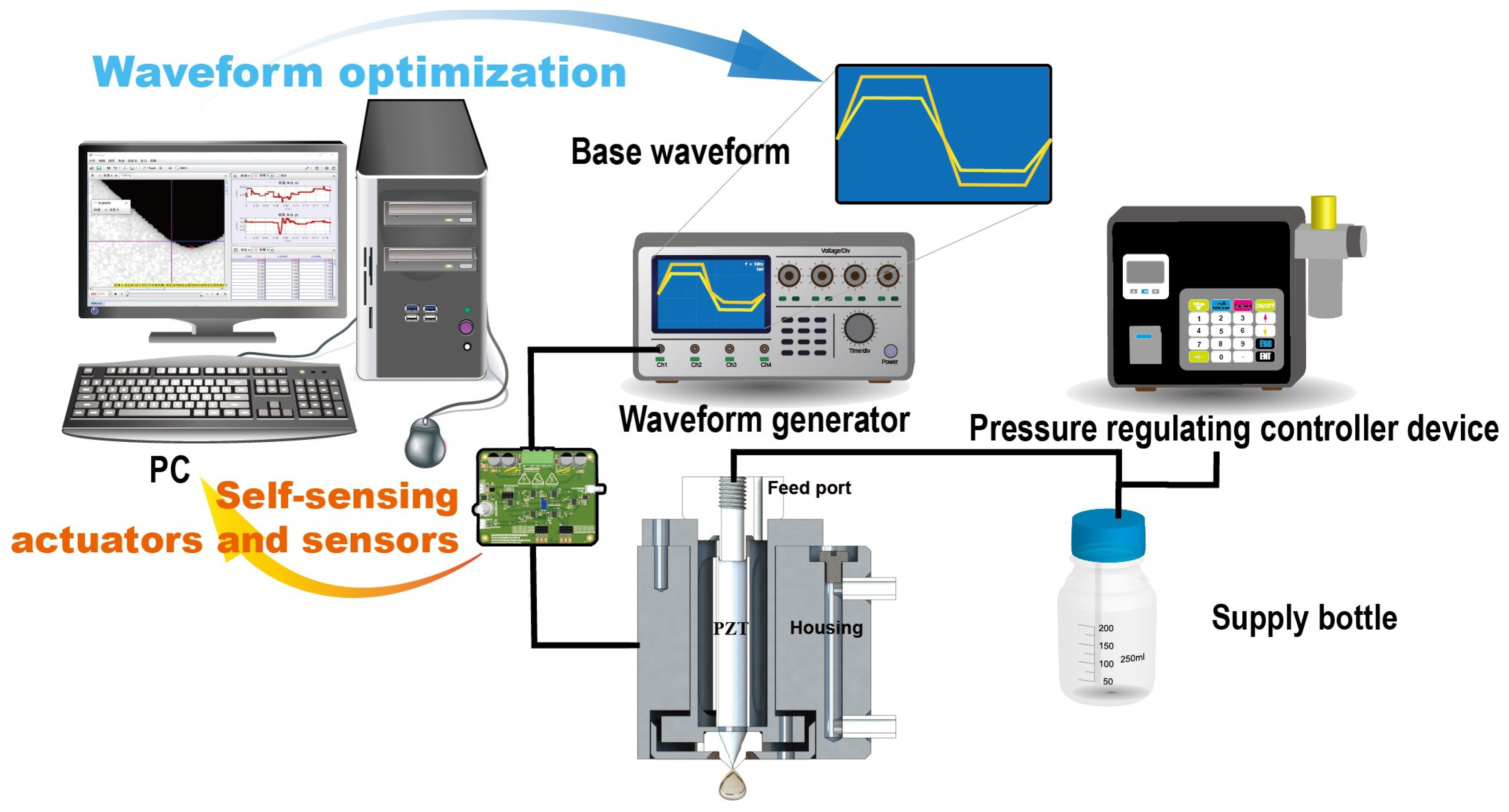
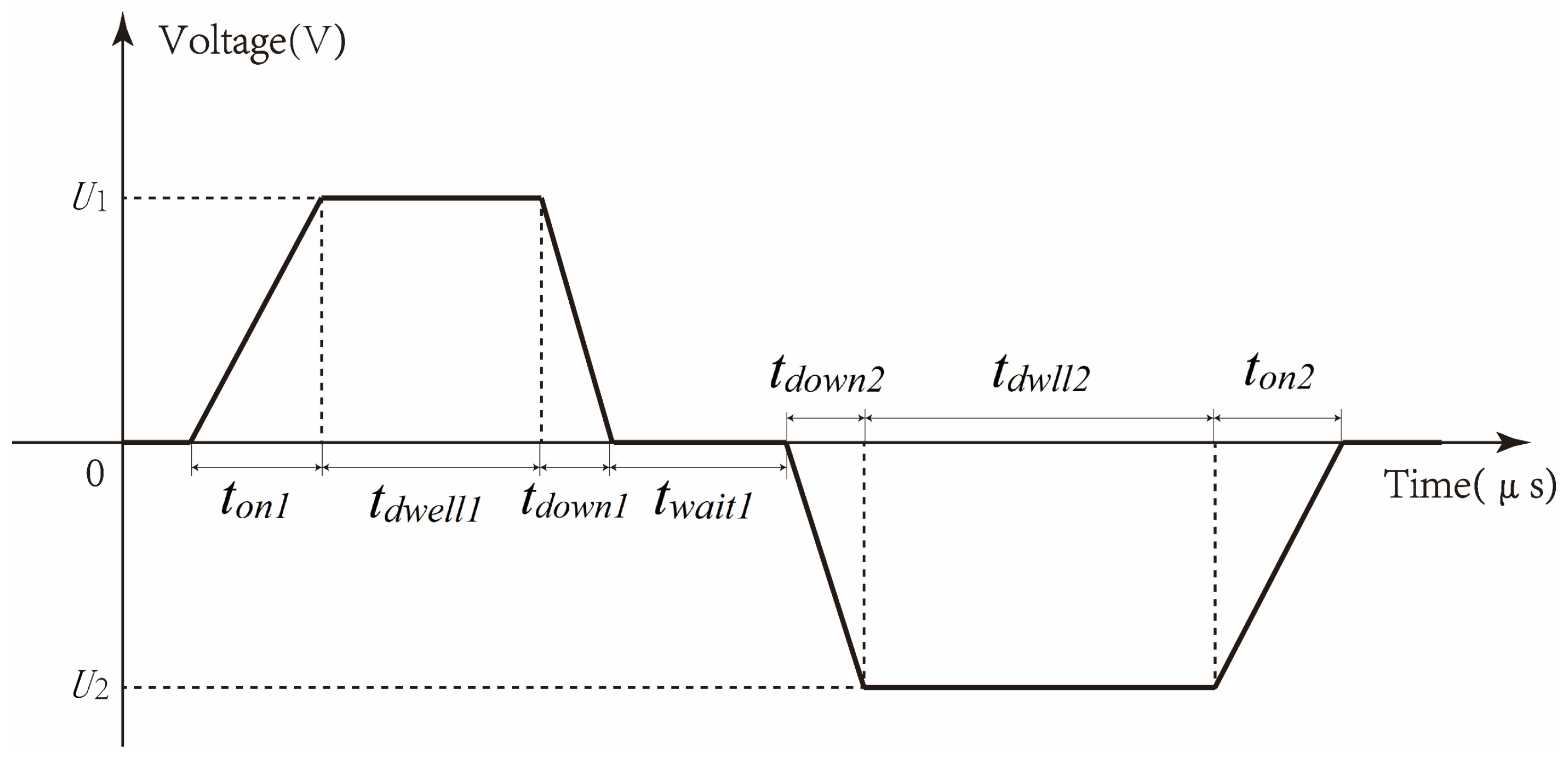
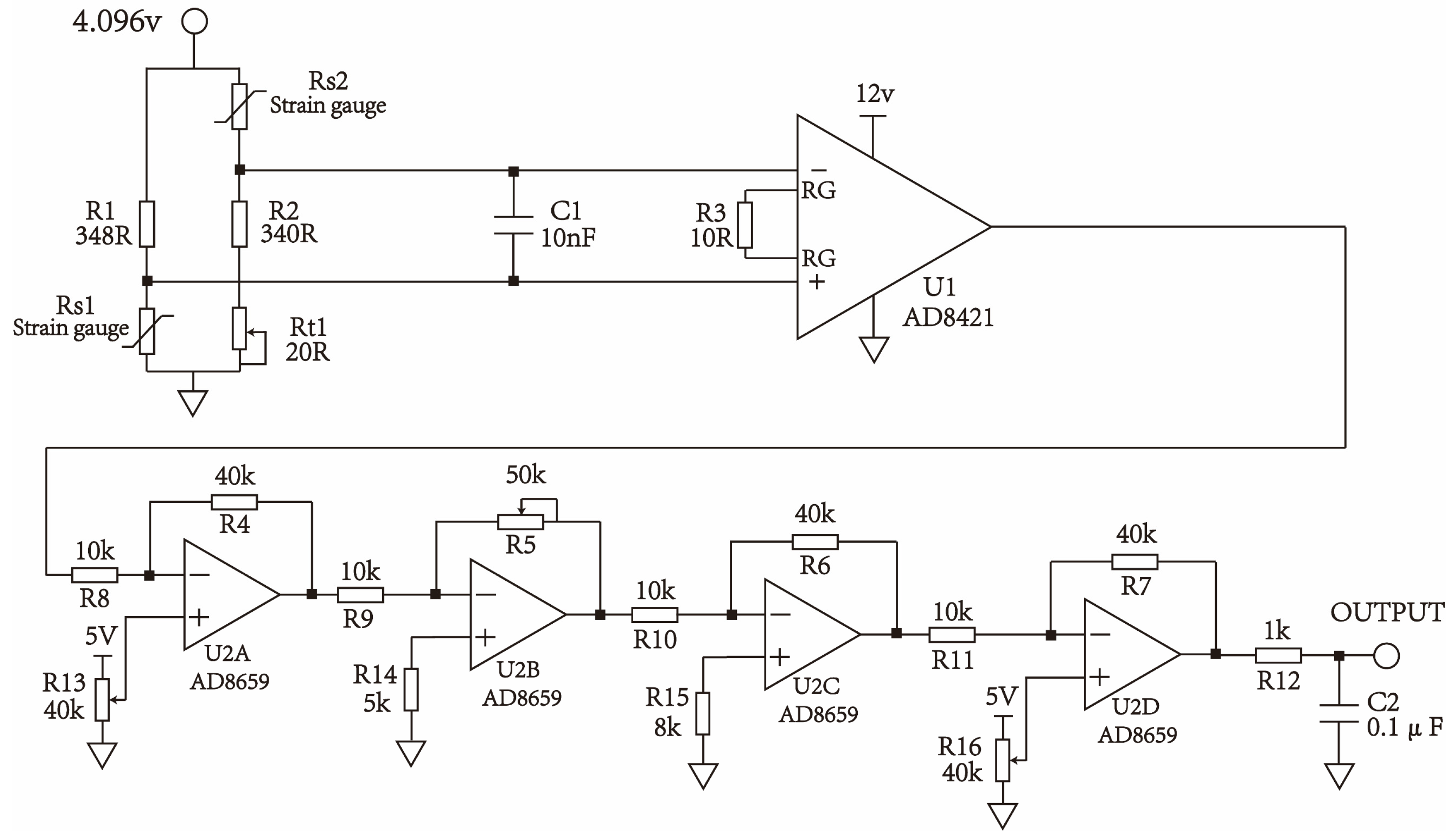
2.1. Piezoelectric Inkjet Printing Residual Vibration Detection and Suppression
2.2. Nonlinear Hysteresis Compensation Model of Piezoelectric Ceramics
2.2.1. Nonlinear Hysteresis Model of Piezoelectric Ceramics
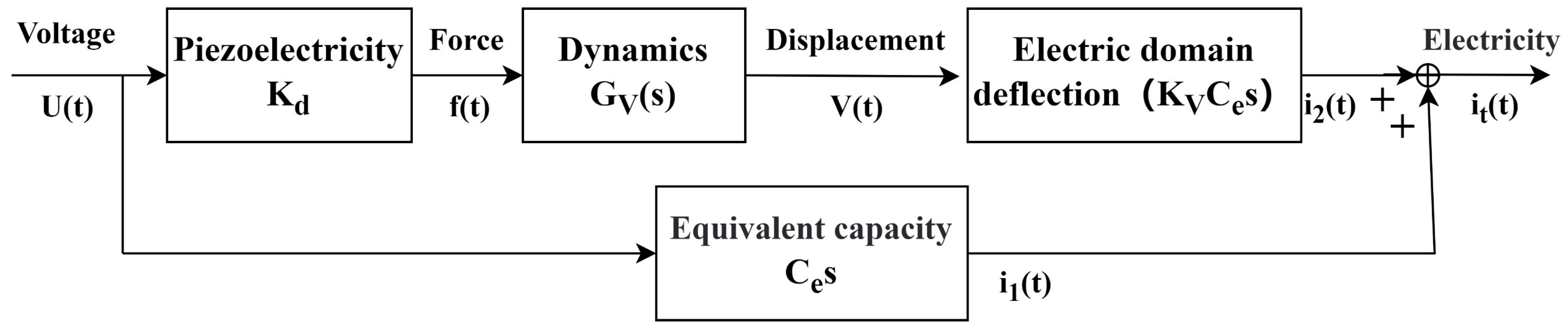
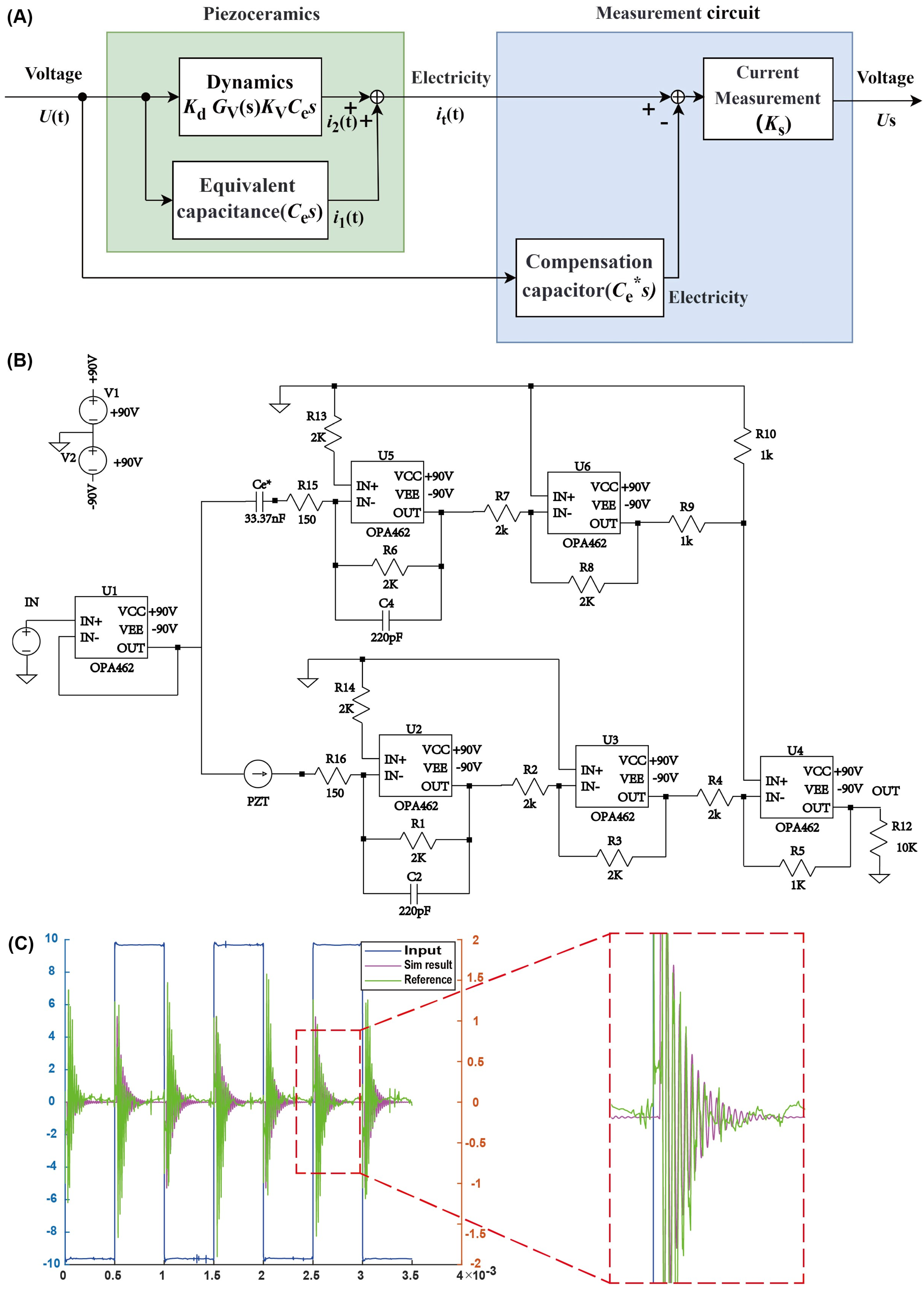
2.2.2. Dynamic Model of Piezoelectric Inkjet Printing System
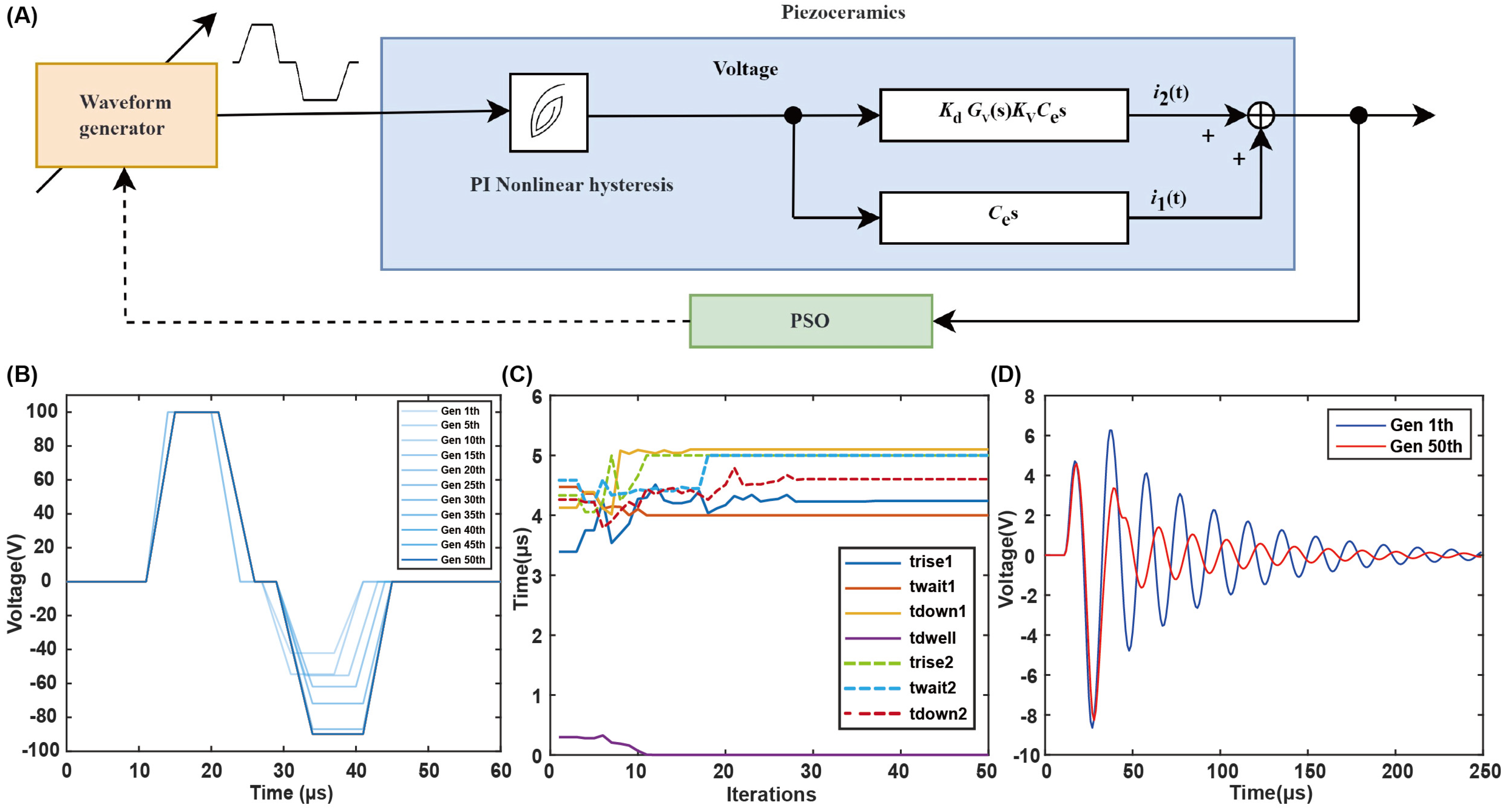
2.3. Residual Vibration Suppression Optimization Method
3. Results and Discussion
3.1. Identification of PI Nonlinear Hysteresis Model
3.2. Identification of Dynamic Model of Piezoelectric Printing System
3.3. Residual Vibration Suppression Optimization Based on Particle Swarm Algorithm
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Roh, J.; Kim, H.; Park, M.; Kwak, J.; Lee, C. Improved Electron Injection in All-Solution-Processed n-Type Organic Field-Effect Transistors with an Inkjet-Printed ZnO Electron Injection Layer. Appl. Surf. Sci. 2017, 420, 100–104. [Google Scholar] [CrossRef]
- Li, X.; Liu, B.; Pei, B.; Chen, J.; Zhou, D.; Peng, J.; Zhang, X.; Jia, W.; Xu, T. Inkjet Bioprinting of Biomaterials. Chem. Rev. 2020, 120, 10793–10833. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.; Takeda, Y.; Shiwaku, R.; Tokito, S.; Cho, K.; Jung, S. Three-Dimensional Monolithic Integration in Flexible Printed Organic Transistors. Nat. Commun. 2019, 10, 54. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Chen, J.; Liu, B.; Wang, X.; Ren, D.; Xu, T. Inkjet Printing for Biofabrication. In 3D Printing and Biofabrication; Ovsianikov, A., Yoo, J., Mironov, V., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 283–301. ISBN 978-3-319-45443-6. [Google Scholar]
- Aqeel, A.B.; Mohasan, M.; Lv, P.; Yang, Y.; Duan, H. Effects of the Actuation Waveform on the Drop Size Reduction in Drop-on-Demand Inkjet Printing. Acta Mech. Sin. 2020, 36, 983–989. [Google Scholar] [CrossRef]
- Zhu, H.; Li, R.; Li, S.; Guo, K.; Ji, C.; Gao, F.; Zheng, Y.; Zhu, R.; Wang, H.; Zhang, L.; et al. Multi-Physical Field Control Piezoelectric Inkjet Bioprinting for 3D Tissue-like Structure Manufacturing. Int. J. Bioprint. 2024, 10, 2120. [Google Scholar] [CrossRef]
- Peng, J.; Huang, J.; Wang, J.; Meng, F.; Gong, H.; Ping, B. The Driving Waveform Design Method of Power-Law Fluid Piezoelectric Printing Based on Iterative Learning Control. Sensors 2022, 22, 935. [Google Scholar] [CrossRef]
- Li, E.Q.; Xu, Q.; Sun, J.; Fuh, J.Y.H.; Wong, Y.S.; Thoroddsen, S.T. Design and Fabrication of a PET/PTFE-Based Piezoelectric Squeeze Mode Drop-on-Demand Inkjet Printhead with Interchangeable Nozzle. Sens. Actuators A Phys. 2010, 163, 315–322. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Li, K.; Liu, Y. Piezoelectric Micro-Jet Devices: A Review. Sens. Actuators A Phys. 2019, 297, 111552. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, G.; Liu, Y.; Wang, J.; Yang, G.; Li, D. Suppression and Utilization of Satellite Droplets for Inkjet Printing: A Review. Processes 2022, 10, 932. [Google Scholar] [CrossRef]
- Li, H.; Yang, W.; Duan, Y.; Chen, W.; Zhang, G.; Huang, Y.; Yin, Z. Residual Oscillation Suppression via Waveform Optimization for Stable Electrohydrodynamic Drop-on-Demand Printing. Addit. Manuf. 2022, 55, 102849. [Google Scholar] [CrossRef]
- Gallas, Q.; Sheplak, M.; Kaysap, A.; Carroll, B.; Nishida, T.; Cattafesta, L.; Mathew, J.; Holman, R. Lumped Element Modeling of Piezoelectric-Driven Synthetic Jet Actuators. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14 January 2002. [Google Scholar]
- Wang, J.; Huang, J.; Peng, J. Hydrodynamic Response Model of a Piezoelectric Inkjet Print-Head. Sens. Actuators A Phys. 2019, 285, 50–58. [Google Scholar] [CrossRef]
- Shah, M.A.; Lee, D.G.; Hur, S. Design and Characteristic Analysis of a MEMS Piezo-Driven Recirculating Inkjet Printhead Using Lumped Element Modeling. Micromachines 2019, 10, 757. [Google Scholar] [CrossRef]
- Khalate, A.A.; Bombois, X.; Ye, S.; Babuška, R.; Koekebakker, S. Minimization of Cross-Talk in a Piezo Inkjet Printhead Based on System Identification and Feedforward Control. J. Micromech. Microeng. 2012, 22, 115035. [Google Scholar] [CrossRef]
- Oktavianty, O.; Kyotani, T.; Haruyama, S.; Kaminishi, K. New Actuation Waveform Design of DoD Inkjet Printer for Single and Multi-Drop Ejection Method. Addit. Manuf. 2019, 25, 522–531. [Google Scholar] [CrossRef]
- Kwon, K.-S.; Kim, W. A Waveform Design Method for High-Speed Inkjet Printing Based on Self-Sensing Measurement. Sens. Actuators A Phys. 2007, 140, 75–83. [Google Scholar] [CrossRef]
- Wang, J.; Huang, J.; Peng, J.; Zhang, J. Piezoelectric Print-Head Drive-Waveform Optimization Method Based on Self-Sensing. Sens. Actuators A Phys. 2019, 299, 111617. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Clévy, C.; Lutz, P. Complete Open Loop Control of Hysteretic, Creeped, and Oscillating Piezoelectric Cantilevers. IEEE Trans. Automat. Sci. Eng. 2010, 7, 440–450. [Google Scholar] [CrossRef]
- Bogy, D.B.; Talke, F.E. Experimental and Theoretical Study of Wave Propagation Phenomena in Drop-on-Demand Ink Jet Devices. IBM J. Res. Dev. 1984, 28, 314–321. [Google Scholar] [CrossRef]
- Khalate, A.A.; Bombois, X.; Babuška, R.; Wijshoff, H.; Waarsing, R. Performance Improvement of a Drop-on-Demand Inkjet Printhead Using an Optimization-Based Feedforward Control Method. Control Eng. Pract. 2011, 19, 771–781. [Google Scholar] [CrossRef]
- Khalate, A.A.; Bombois, X.; Scorletti, G.; Babuska, R.; Koekebakker, S.; de Zeeuw, W. A Waveform Design Method for a Piezo Inkjet Printhead Based on Robust Feedforward Control. J. Microelectromech. Syst. 2012, 21, 1365–1374. [Google Scholar] [CrossRef]
- Shah, M.A.; Lee, D.-G.; Lee, B.Y.; Kim, N.W.; An, H.; Hur, S. Actuating Voltage Waveform Optimization of Piezoelectric Inkjet Printhead for Suppression of Residual Vibrations. Micromachines 2020, 11, 900. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.-T.; Leong, J.Y.C.; Watanabe, S.; Morooka, T.; Shimizu, T. A Multi-Fidelity Model for Simulations and Sensitivity Analysis of Piezoelectric Inkjet Printheads. Micromachines 2021, 12, 1038. [Google Scholar] [CrossRef] [PubMed]
- Wassink, M.G.; Bosch, N.J.M.; Bosgra, O.H.; Koekebakker, S. Enabling Higher Jet Frequencies for an Inkjet Printhead Using Iterative Learning Control. In Proceedings of the 2005 IEEE Conference on Control Applications 2005—CCA 2005, Toronto, ON, Canada, 28–31 August 2005; pp. 791–796. [Google Scholar]
- Wang, J.; Xiong, C.; Huang, J.; Peng, J.; Zhang, J.; Zhao, P. Waveform Design Method for Piezoelectric Print-Head Based on Iterative Learning and Equivalent Circuit Model. Micromachines 2023, 14, 768. [Google Scholar] [CrossRef] [PubMed]
- Krasnosel’skiǐ, M.A.; Pokrovskiǐ, A.V. Systems with Hysteresis; Springer: Berlin/Heidelberg, Germany, 1989; ISBN 978-3-642-64782-6. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Li, S.; Zhu, R.; Gao, F.; Yin, Z.; Liu, L.; Zheng, X. Residual Vibration Suppression of Piezoelectric Inkjet Printing Based on Particle Swarm Optimization Algorithm. Micromachines 2024, 15, 1192. https://doi.org/10.3390/mi15101192
Zhu H, Li S, Zhu R, Gao F, Yin Z, Liu L, Zheng X. Residual Vibration Suppression of Piezoelectric Inkjet Printing Based on Particle Swarm Optimization Algorithm. Micromachines. 2024; 15(10):1192. https://doi.org/10.3390/mi15101192
Chicago/Turabian StyleZhu, Huixuan, Song Li, Runyang Zhu, Feiyang Gao, Zhenyu Yin, Lianqing Liu, and Xiongfei Zheng. 2024. "Residual Vibration Suppression of Piezoelectric Inkjet Printing Based on Particle Swarm Optimization Algorithm" Micromachines 15, no. 10: 1192. https://doi.org/10.3390/mi15101192
APA StyleZhu, H., Li, S., Zhu, R., Gao, F., Yin, Z., Liu, L., & Zheng, X. (2024). Residual Vibration Suppression of Piezoelectric Inkjet Printing Based on Particle Swarm Optimization Algorithm. Micromachines, 15(10), 1192. https://doi.org/10.3390/mi15101192