
A Self-Propelled Linear Piezoelectric Micro-Actuator Inspired by the Movement Patterns of Aquatic Beetles



Abstract
:1. Introduction
2. Structure Design and Working Principle
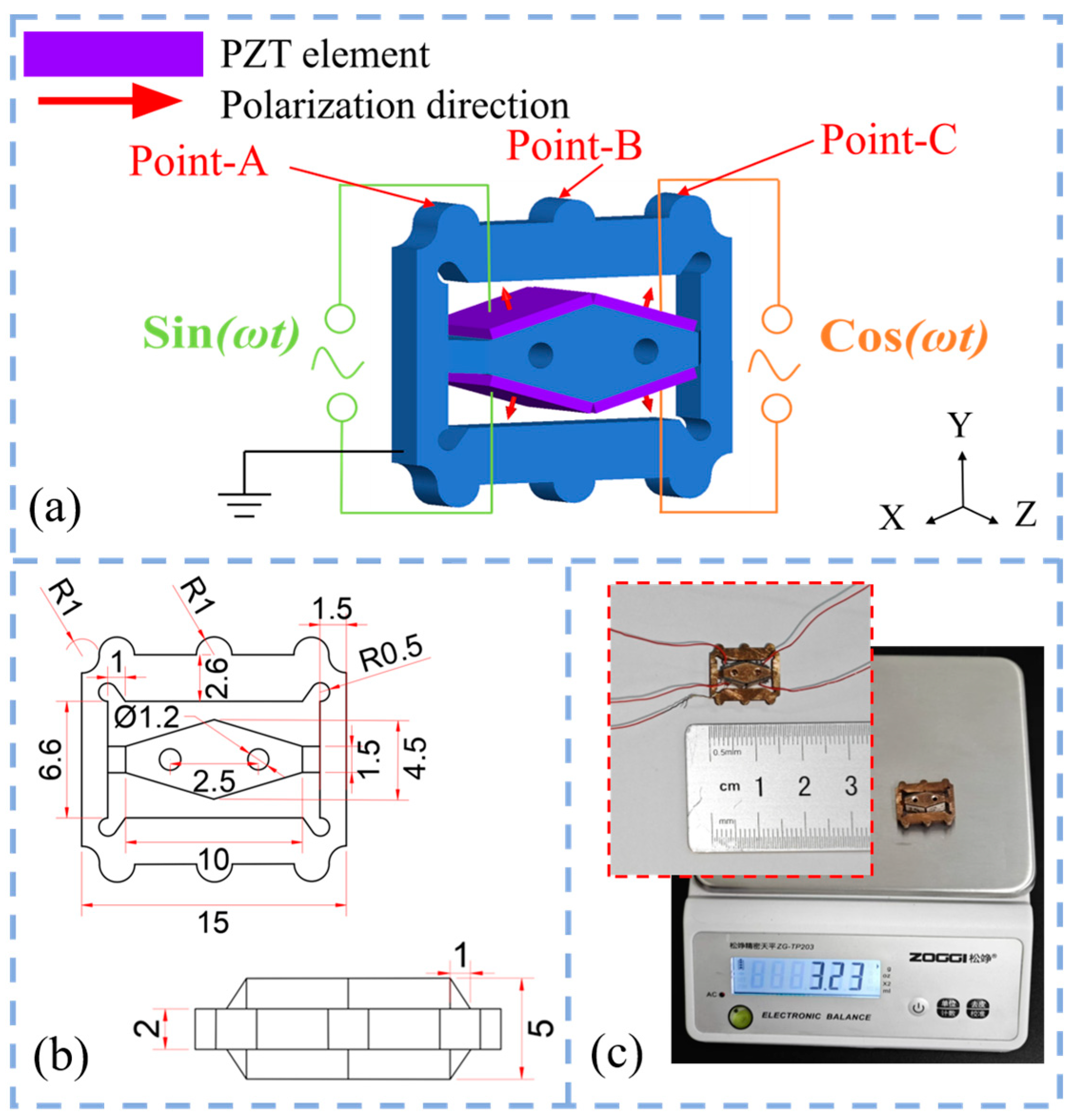
2.1. Biomimetic Design of the SLPMA
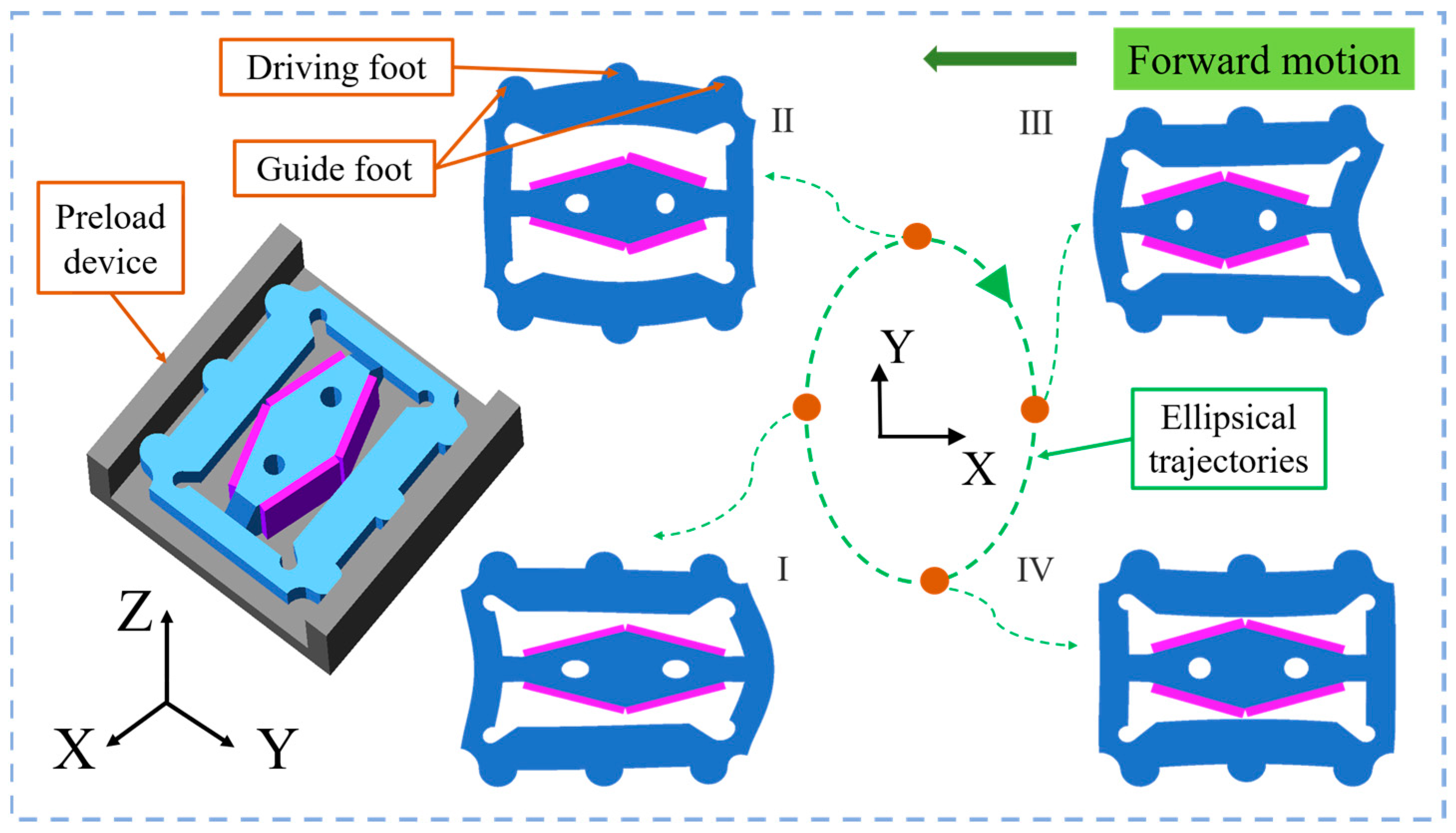
2.2. Working Principle of the SLPMA
3. Simulation Validation and Mathematical Analysis
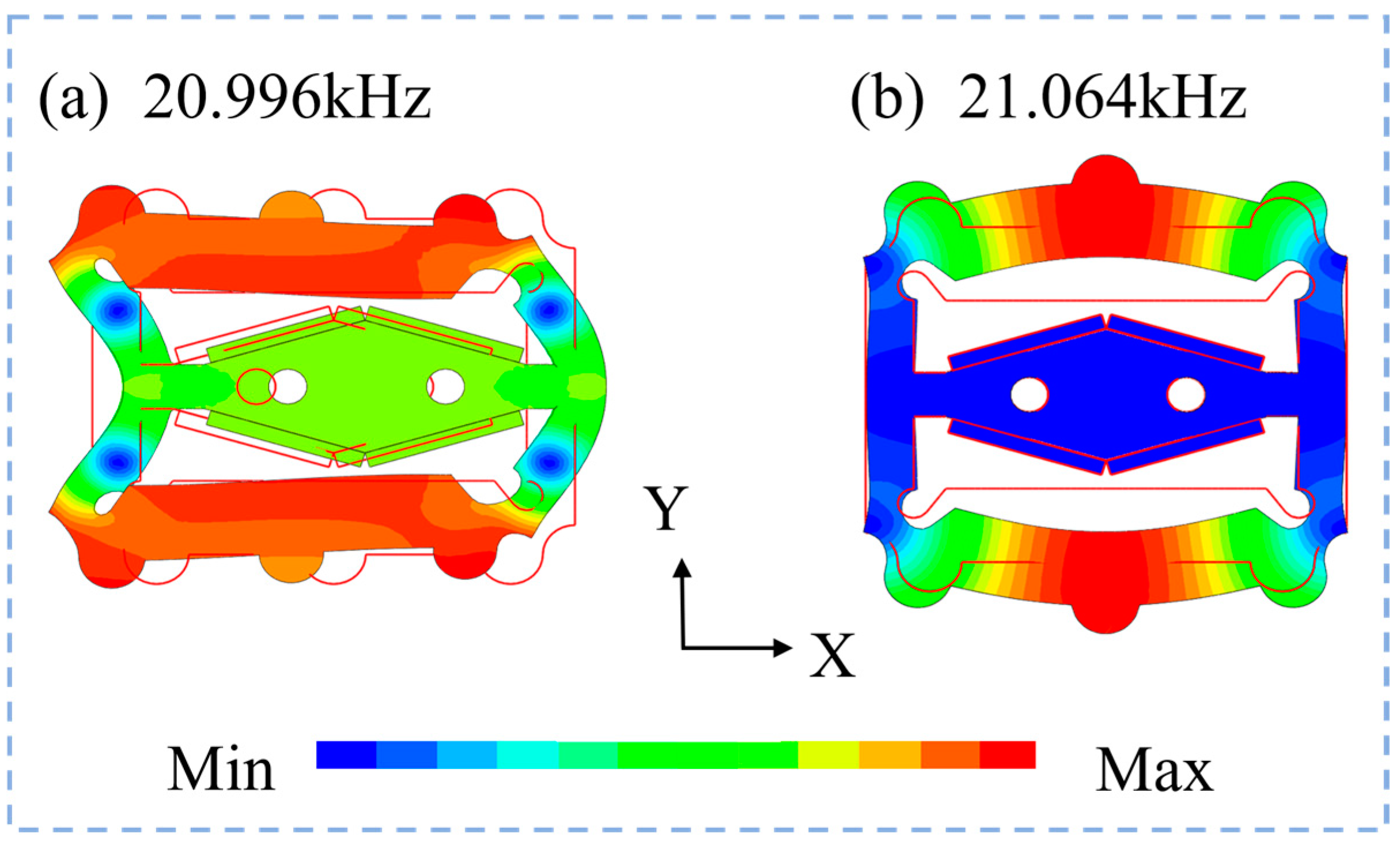
3.1. Modal Analysis
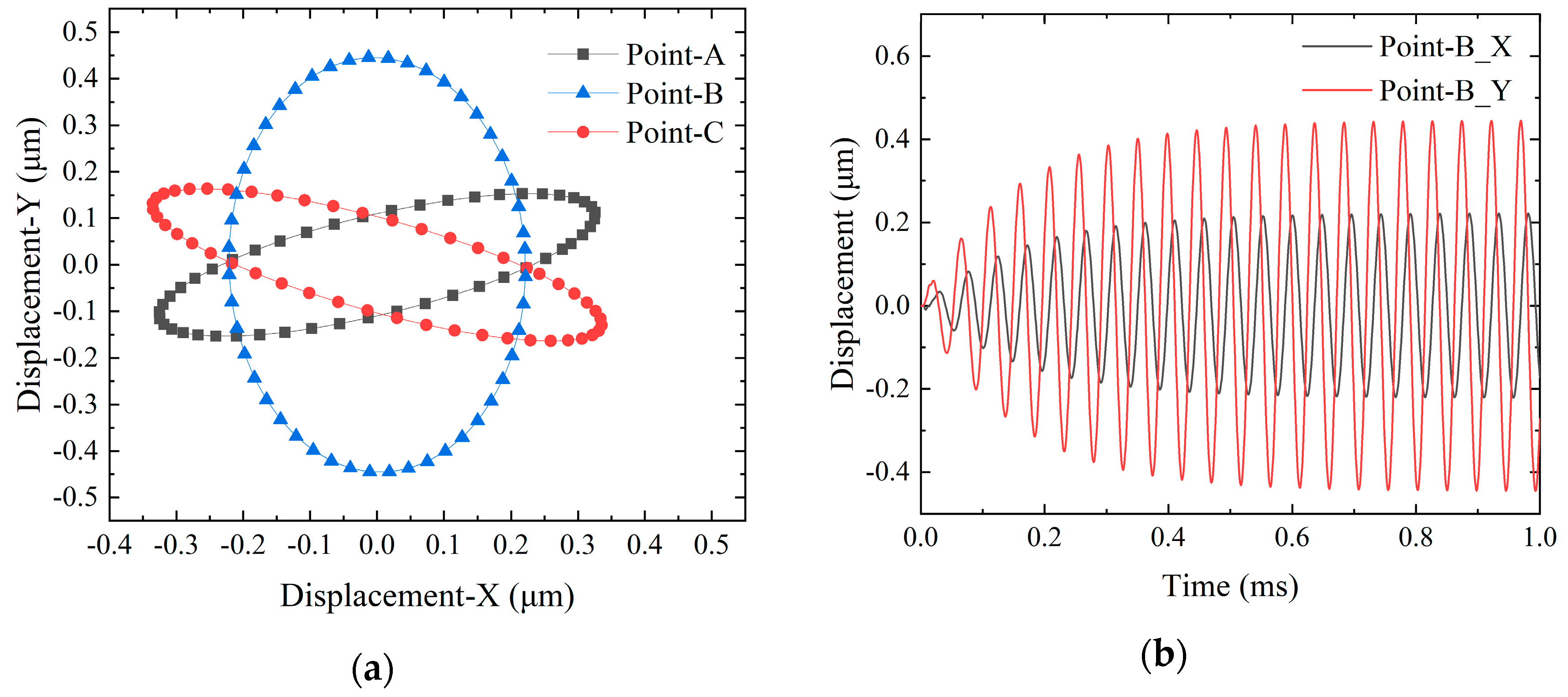
3.2. Transient Dynamics Analysis
4. Experimental Measurement
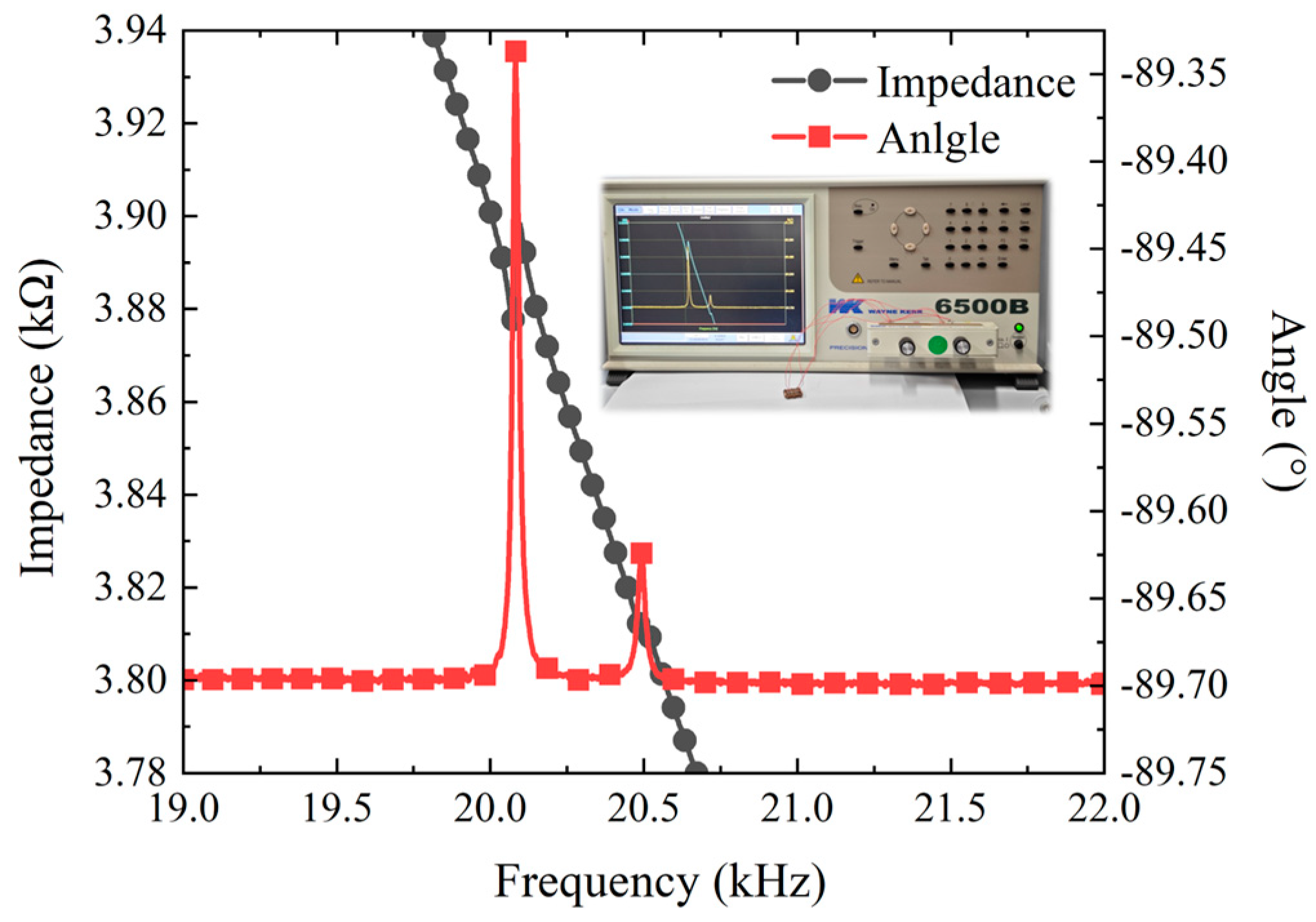
4.1. Impedance Testing
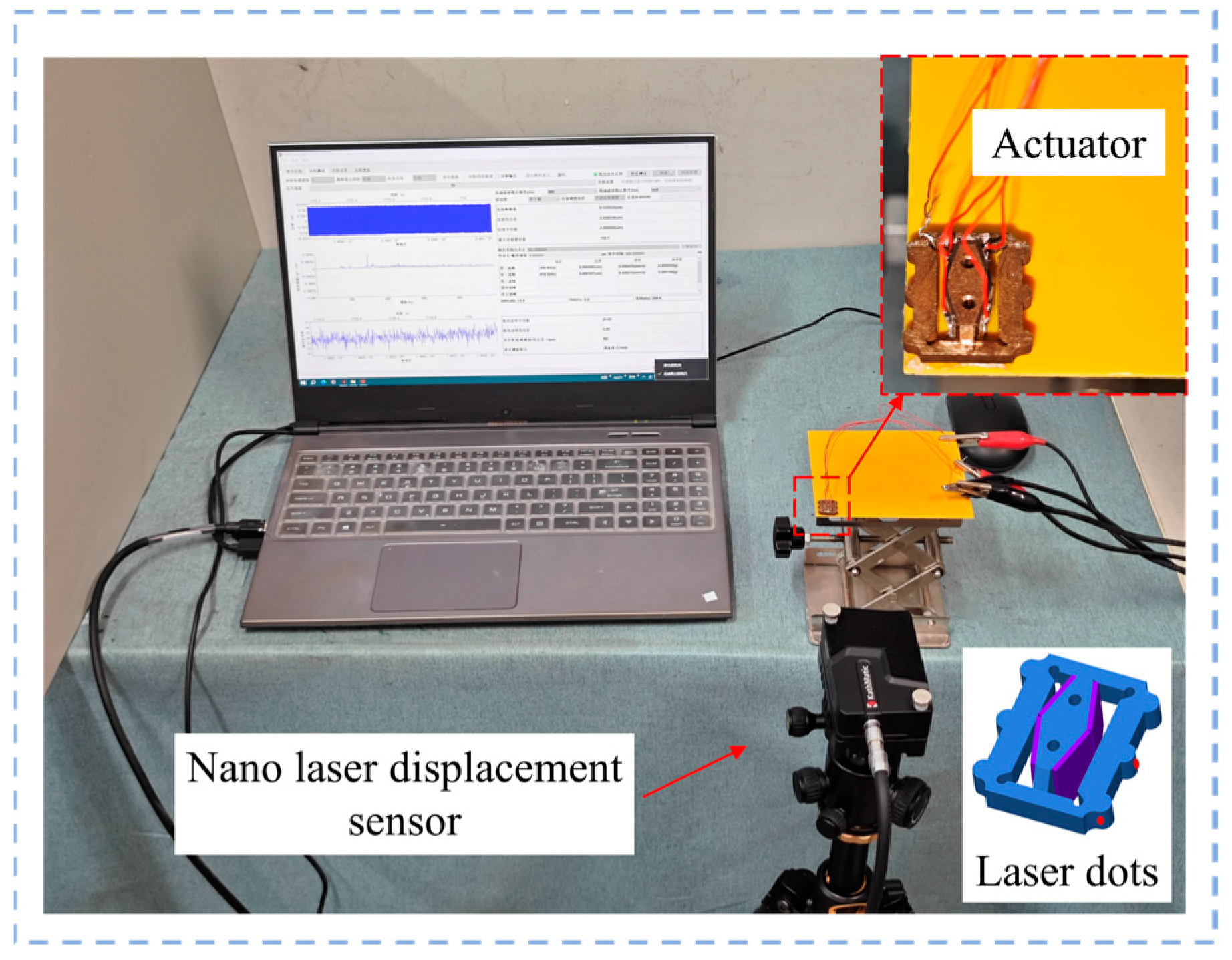
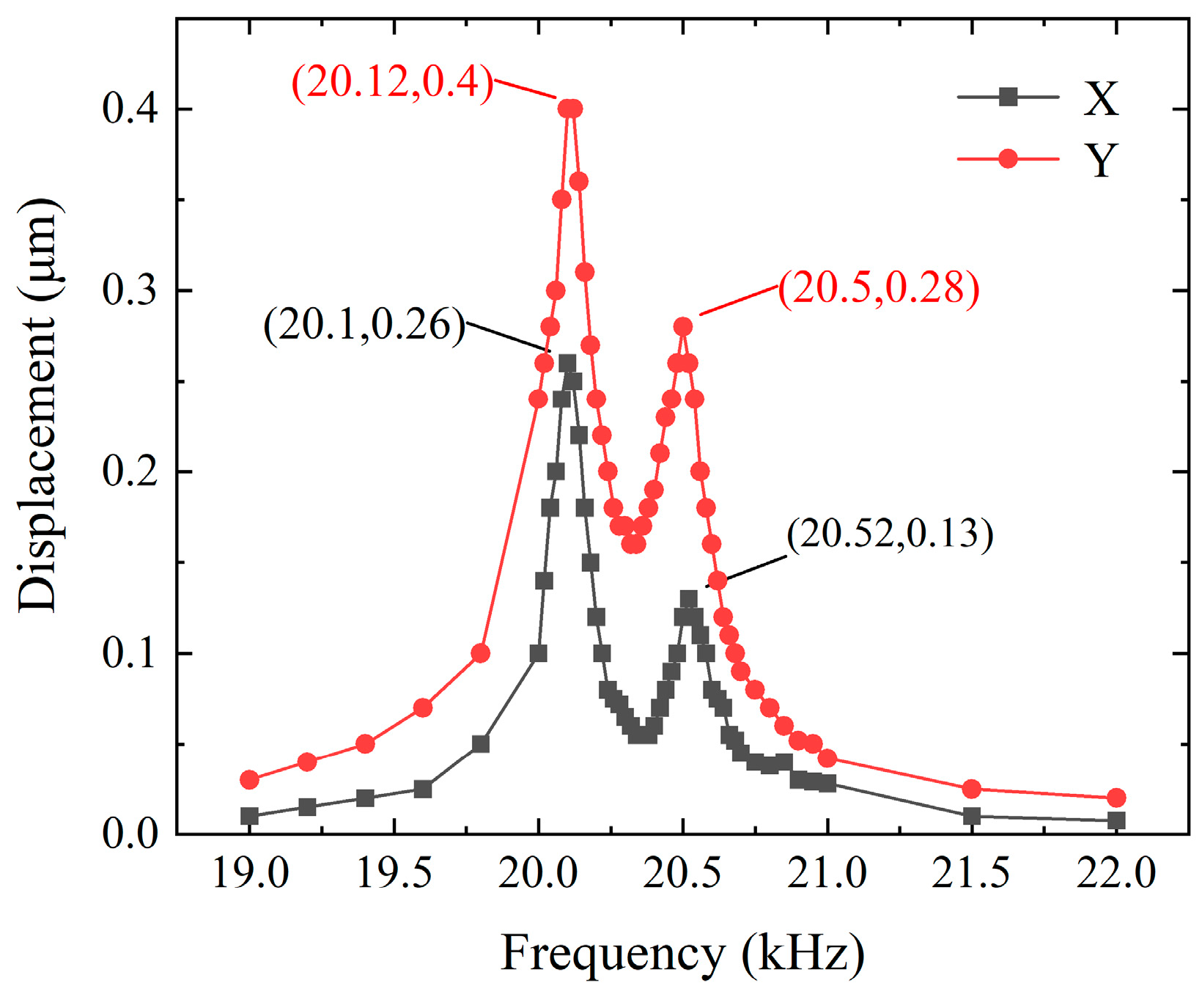
4.2. Vibration Modal Testing
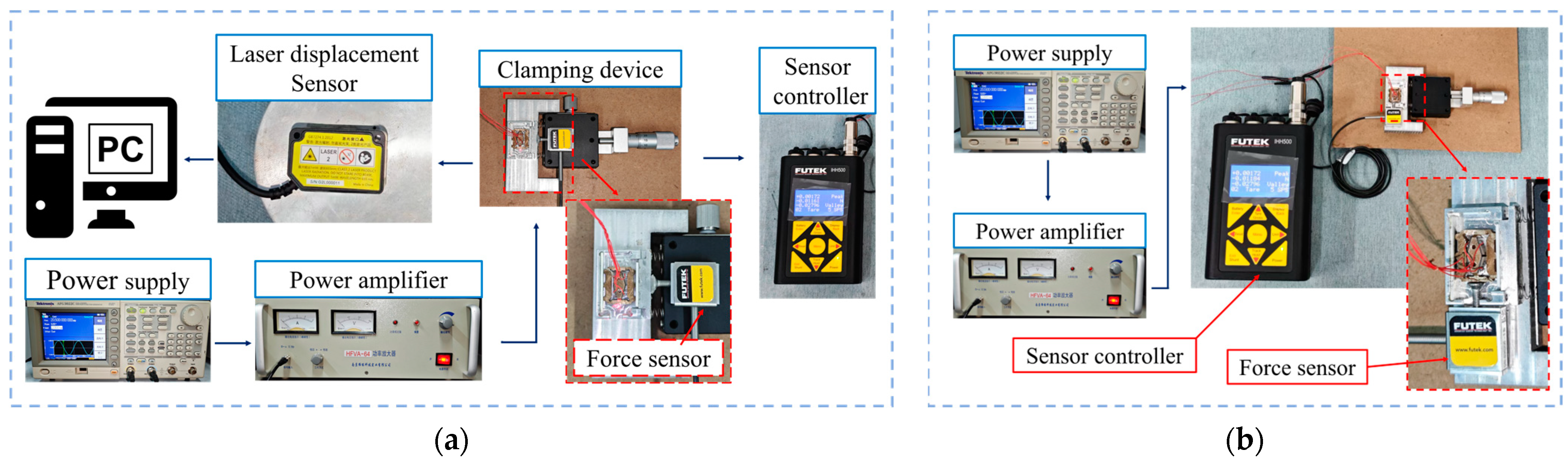
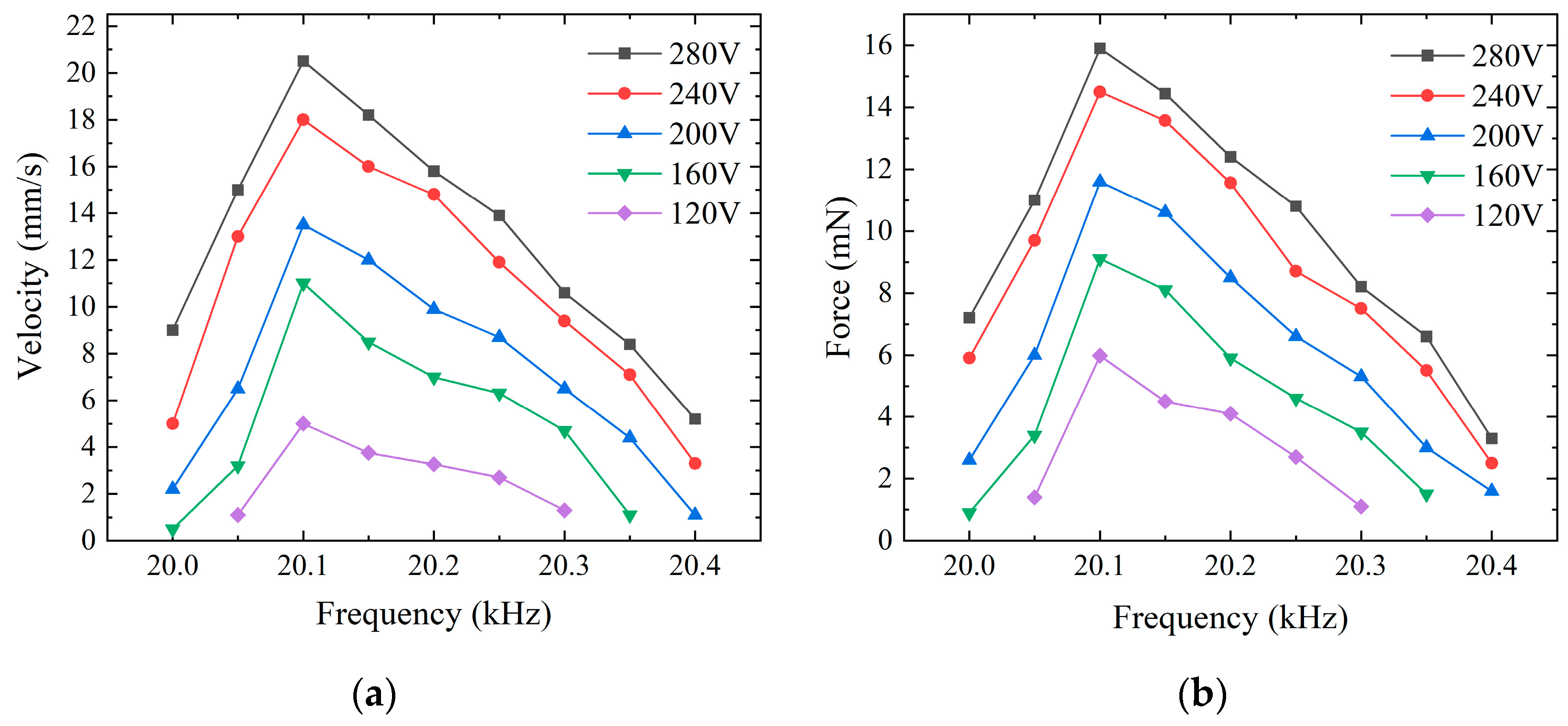
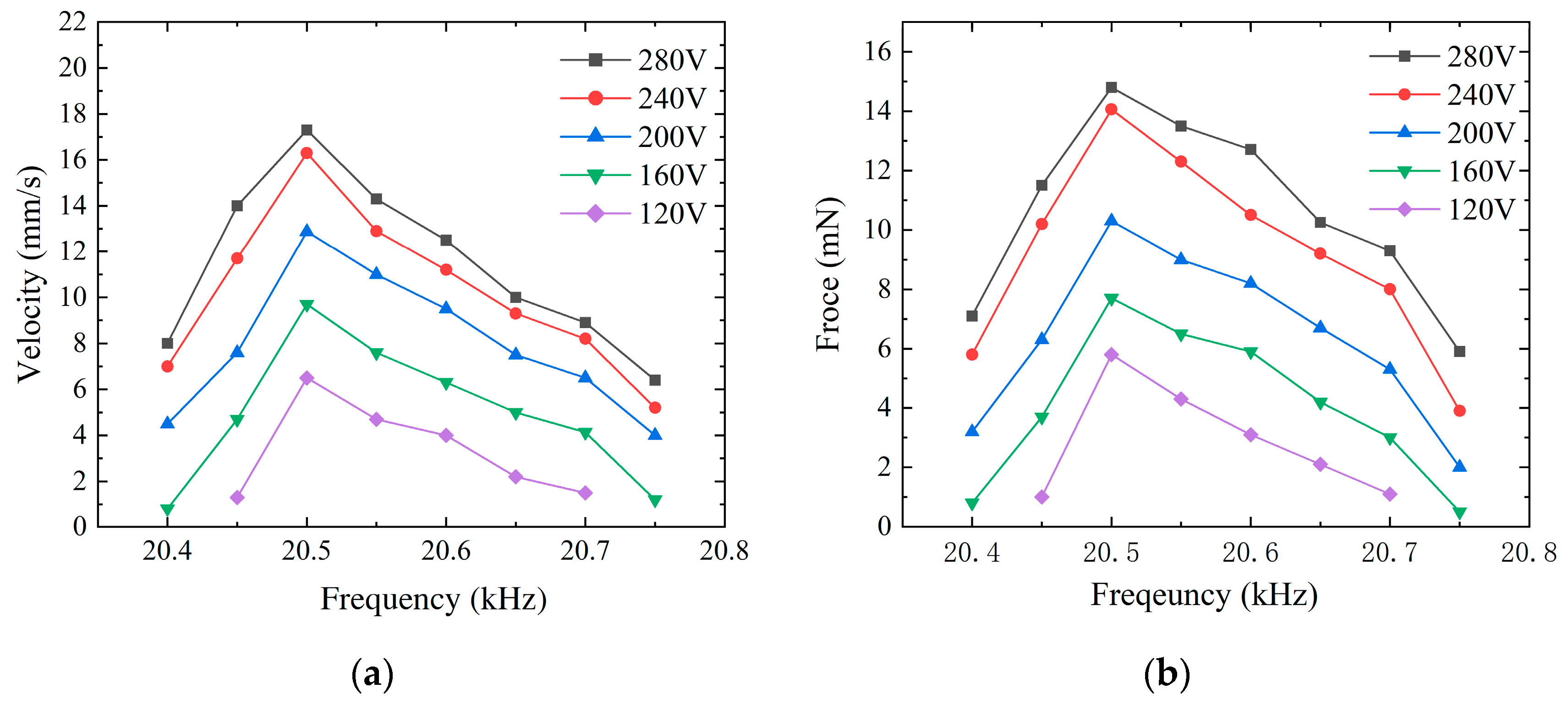
4.3. Driver Characterization Testing
- (1)
- The SLPM actuator consists of an external square frame and an internal diamond-shaped excitation structure, with driving and guiding feet on the frame. It has a compact structure, which is conducive to miniaturization; the size and weight are limited to 15 mm × 12.8 mm × 5 mm and 3.23 g, respectively.
- (2)
- Due to the symmetrical structural design, the SUSM can output bidirectional linear motion from the same sine and cosine signals; in addition, the simple structure facilitates machining.
- (3)
- Benefiting from the symmetrical structure, the number of PZT elements required for assembly is minimized, facilitating easy construction, and bidirectional motion can be realized by the same vibration modes, which is conducive to the consistency of the characteristics between forward and backward motions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Deng et al. [27] | Sangchap et al. [28] | Sun et al. [21] | Zhang et al. [30] | The SLPMA |
|---|---|---|---|---|---|
| Size (mm3) | 30 × 30× 65 | 55 × 23.1 × 15 | 20 × 18.8 × 10 | 107 × 56.96 × 15 | 15 × 12.8 × 5 |
| Weight (g) | 56.7 | / | / | 1550 | 3.23 |
| Frequency (kHz) | 21.5 | 0.150 | 88.5 | 29.2 | 20.1/20.5 |
| Voltage (Vp-p) | 200 | 20 | 120 | 275 | 280 |
| Maximum thrust force (mN) | / | / | / | 10,000 | 15.9/14.8 |
| Maximum speed (mm/s) | 200 | 1.075 | 120.6/130.1 | 241.6 | 20.5/17.3 |
| Number of PZT elements | 10 | / | 6 | / | 4 |
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent Trends in Piezoelectric Actuators for Precision Motion and Their Applications: A Review. Smart Mater. Struct. 2020, 30, 013002. [Google Scholar] [CrossRef]
- Jain, T.; Sunil, B.D.Y.; Hasan, M.A.; Jain, A.; B, S.; Chahuan, N. Smart Materials for Sensing and Actuation: State-of-the-Art and Prospects. E3S Web Conf. 2024, 505, 01034. [Google Scholar] [CrossRef]
- Rajeev, A.; Yin, L.; Kalambate, P.K.; Khabbaz, M.B.; Trinh, B.; Kamkar, M.; Mekonnen, T.H.; Tang, S.; Zhao, B. Nano-Enabled Smart and Functional Materials toward Human Well-Being and Sustainable Developments. Nanotechnology 2024, 35, 352003. [Google Scholar] [CrossRef]
- Wang, C.; Li, H.; Zhang, Z.; Yu, P.; Yang, L.; Du, J.; Niu, Y.; Jiang, J. Review of Bionic Crawling Micro-Robots. J. Intell. Robot. Syst. 2022, 105, 56. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, W.; Zhao, J.; Hu, J.; Zou, Y. Design, Takeoff and Steering Torques Modulation of an 80-Mg Insect-Scale Flapping-Wing Robot. Micro Nano Lett. 2020, 15, 1079–1083. [Google Scholar] [CrossRef]
- Ryndzionek, R.; Sienkiewicz, Ł. A Review of Recent Advances in the Single- and Multi-Degree-of-Freedom Ultrasonic Piezoelectric Motors. Ultrasonics 2021, 116, 106471. [Google Scholar] [CrossRef]
- Song, S.; Shao, S.; Xu, M.; Shao, Y.; Tian, Z.; Feng, B. Piezoelectric Inchworm Rotary Actuator with High Driving Torque and Self-Locking Ability. Sens. Actuators A Phys. 2018, 282, 174–182. [Google Scholar] [CrossRef]
- Jūrėnas, V.; Kazokaitis, G.; Vaškas, D. Ultrasonic Motor with Spherical Rotor for Nanosatellite Orientation. In Proceedings of the 2020 International Conference Mechatronic Systems and Materials (MSM), Bialystok, Poland, 1–3 July 2020; pp. 1–5. [Google Scholar]
- Holden, J.P.F.; Gan, L.; Sims-Williams, D.; Gilbert, J.; Osborne, P.; Bastankhah, M. Characterisation and Integration of Piezoelectric Trimorph Actuators for Blade Active Surface Control on a Scaled Wind Turbine. J. Phys. Conf. Ser. 2024, 2767, 092094. [Google Scholar] [CrossRef]
- Ahmad Fuaad, M.R.; Hasan, M.N.; Ahmad Asri, M.I.; Mohamed Ali, M.S. Microactuators Technologies for Biomedical Applications. Microsyst. Technol. 2023, 29, 953–984. [Google Scholar] [CrossRef]
- Behera, B.; Nemade, H.B. Recent Developments of Piezoelectric Motors with Diverse Operating Principles. ISSS J. Micro Smart Syst. 2017, 6, 173–185. [Google Scholar] [CrossRef]
- Ma, D. Research Progress and Development Direction of Structural Optimization and Modeling of Traveling Wave Rotating Ultrasonic Motor. In Proceedings of the 2021 4th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 12–14 November 2021; pp. 442–447. [Google Scholar]
- Mukhopadhyay, S.; Behera, B.; Kumar, J. A Brief Review on the Recent Evolution in Piezoelectric Linear Ultrasonic Motors. Eng. Res. Express 2021, 3, 042003. [Google Scholar] [CrossRef]
- Yun, H.; Kong, D.; Aoyagi, M. Development of a Multi-Drive-Mode Piezoelectric Linear Actuator with Parallel-Arrangement Dual Stator. Precis. Eng. 2022, 77, 127–140. [Google Scholar] [CrossRef]
- Ghenna, S.; Bernard, Y.; Daniel, L. Design and Experimental Analysis of a High Force Piezoelectric Linear Motor. Mechatronics 2023, 89, 102928. [Google Scholar] [CrossRef]
- Dong, H.; Li, T.; Wang, Z.; Ning, Y. Design and Experiment of a Piezoelectric Actuator Based on Inchworm Working Principle. Sens. Actuators A Phys. 2020, 306, 111950. [Google Scholar] [CrossRef]
- Kanada, A.; Mashimo, T. Design and Experiments of Flexible Ultrasonic Motor Using a Coil Spring Slider. IEEE/ASME Trans. Mechatron. 2020, 25, 468–476. [Google Scholar] [CrossRef]
- Yu, P.; Wang, L.; Zhang, S.; Jin, J. Transfer Matrix Modeling and Experimental Verification of Forked Piezoelectric Actuators. Int. J. Mech. Sci. 2022, 232, 107604. [Google Scholar] [CrossRef]
- Lai, Z.; Chen, B.; Li, J.; Wang, Y. A Compact Standing Wave Ultrasonic Motor Using Collinear Layout. In Proceedings of the 2022 16th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Nanjing, China, 10–14 October 2022; pp. 204–208. [Google Scholar]
- Kazumi, T.; Kurashina, Y.; Takemura, K. Ultrasonic Motor with Embedded Preload Mechanism. Sens. Actuators A Phys. 2019, 289, 44–49. [Google Scholar] [CrossRef]
- Sun, D.; Tang, Y.; Wang, J.; Wang, X. Design of an H-Shaped Linear Piezoelectric Motor for Safety and Arming Device. Sens. Actuators A Phys. 2020, 303, 111687. [Google Scholar] [CrossRef]
- Bai, D.; Quan, Q.; Tang, D.; Deng, Z. Design and Experiments of a Novel Rotary Piezoelectric Actuator Using Longitudinal–Torsional Convertors. IEEE Access 2019, 7, 22186–22195. [Google Scholar] [CrossRef]
- Zhu, B.; Li, C.; Wu, Z.; Zhu, X. Design and Dynamic Analysis of a Novel Compound Bending Hollow Piezoelectric Beam Miniature Rotary Actuator. Ultrasonics 2023, 134, 107065. [Google Scholar] [CrossRef]
- Izuhara, S.; Mashimo, T. Design and Characterization of a Thin Linear Ultrasonic Motor for Miniature Focus Systems. Sens. Actuators A Phys. 2021, 329, 112797. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Deng, J.; Zhang, S.; Chen, W. Development of a Linear Piezoelectric Microactuator Inspired by the Hollowing Art. IEEE Trans. Ind. Electron. 2022, 69, 10407–10416. [Google Scholar] [CrossRef]
- Tanoue, Y.; Morita, T. Rod Drive Type Ultrasonic Linear Motor with Quadruped Stator. Jpn. J. Appl. Phys. 2020, 59, SKKD13. [Google Scholar] [CrossRef]
- Deng, J.; Yang, C.; Liu, Y.; Zhang, S.; Li, J.; Ma, X.; Xie, H. Design and Experiments of a Small Resonant Inchworm Piezoelectric Robot. Sci. China Technol. Sci. 2023, 66, 821–829. [Google Scholar] [CrossRef]
- Sangchap, M.; Tahmasebipour, M.; Tahmasebipour, Y. A Linear Inchworm Piezomotor with a New Configuration: Design Considerations, Fabrication and Characterization. Iran. J. Sci. Technol. Trans. Mech. Eng. 2022, 46, 149–160. [Google Scholar] [CrossRef]
- Bai, K.; Li, C.; Xi, C. Design of Two-Way Self-Moving Linear Ultrasonic Motor. IOP Conf. Ser. Earth Environ. Sci. 2020, 446, 042065. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, W.; Liu, Y.; Liu, J.; Jiang, Q. A Frog-Shaped Linear Piezoelectric Actuator Using First-Order Longitudinal Vibration Mode. IEEE Trans. Ind. Electron. 2017, 64, 2188–2195. [Google Scholar] [CrossRef]
- Bhokare, S.G.; Behera, B. Motion Improvised Miniaturized Dual Focus Lens Module Based on Piezoelectric Actuator for the Medical Applications. Ferroelectrics 2022, 598, 68–78. [Google Scholar] [CrossRef]


| Stiffness Coefficient Matrix/1010 (N·m2) | Piezoelectric Constant Matrix/(C·m−2) | Relative Dielectric Coefficient Matrix | |||
|---|---|---|---|---|---|
| c11 | 14.4 | e15 | 11.7 | ε11 | 770 |
| c12 | 7.8 | e24 | 11.7 | ε33 | 550 |
| c13 | 7.8 | e31 | −4.2 | ||
| c33 | 12.4 | e33 | 14.0 | ||
| c44 | 3.0 | ||||
| c66 | 3.3 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, G. A Self-Propelled Linear Piezoelectric Micro-Actuator Inspired by the Movement Patterns of Aquatic Beetles. Micromachines 2024, 15, 1197. https://doi.org/10.3390/mi15101197
Wang X, Wang G. A Self-Propelled Linear Piezoelectric Micro-Actuator Inspired by the Movement Patterns of Aquatic Beetles. Micromachines. 2024; 15(10):1197. https://doi.org/10.3390/mi15101197
Chicago/Turabian StyleWang, Xinjie, and Gen Wang. 2024. "A Self-Propelled Linear Piezoelectric Micro-Actuator Inspired by the Movement Patterns of Aquatic Beetles" Micromachines 15, no. 10: 1197. https://doi.org/10.3390/mi15101197