
Research on Adaptive Grasping with a Prosthetic Hand Based on Perceptual Information on Hardness and Surface Roughness

Abstract
:1. Introduction
2. The Grip Control Strategy of Prosthetic Hands Based on Natural Hand Actions
2.1. Introduction to the Prosthetic Hand
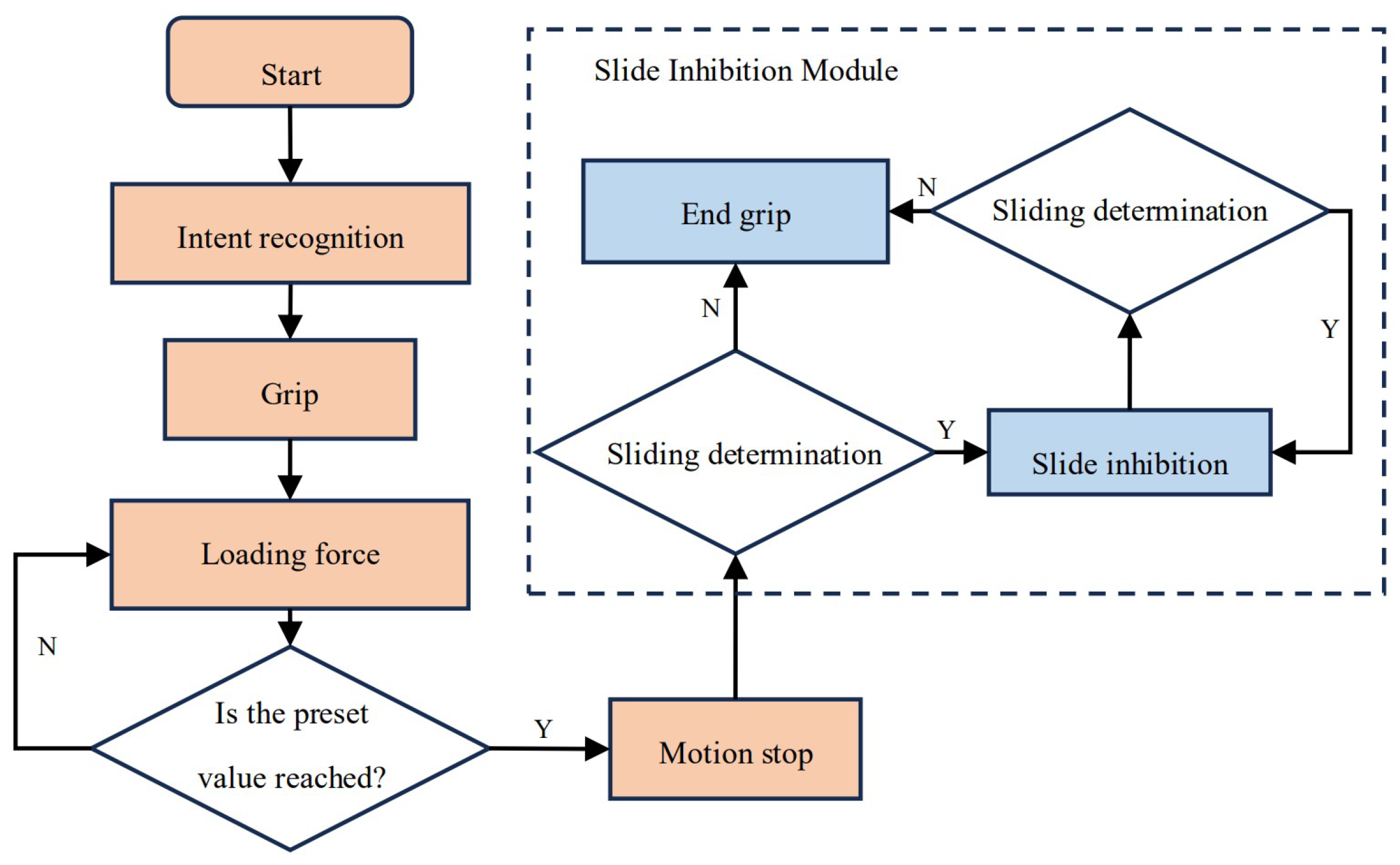
2.2. Introduction to the Basic Grip Control Strategy
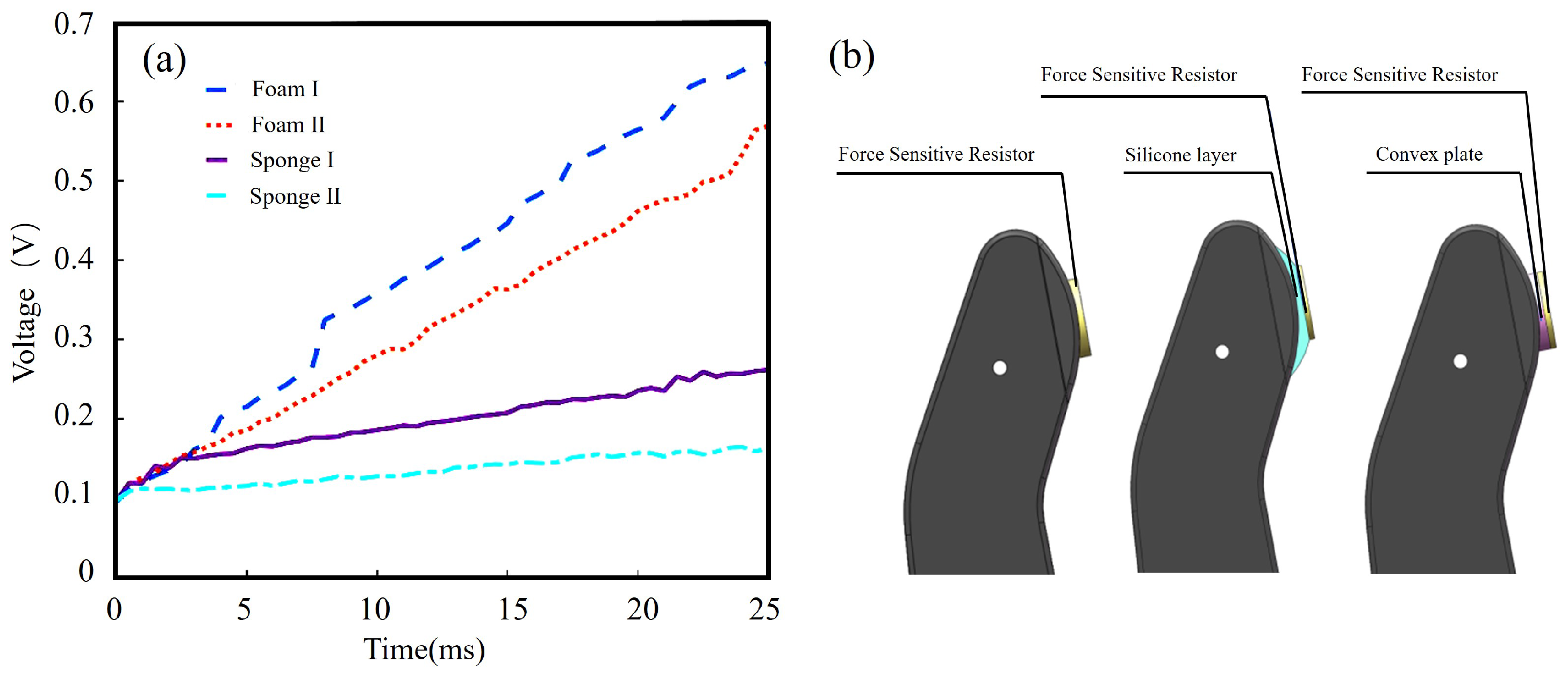
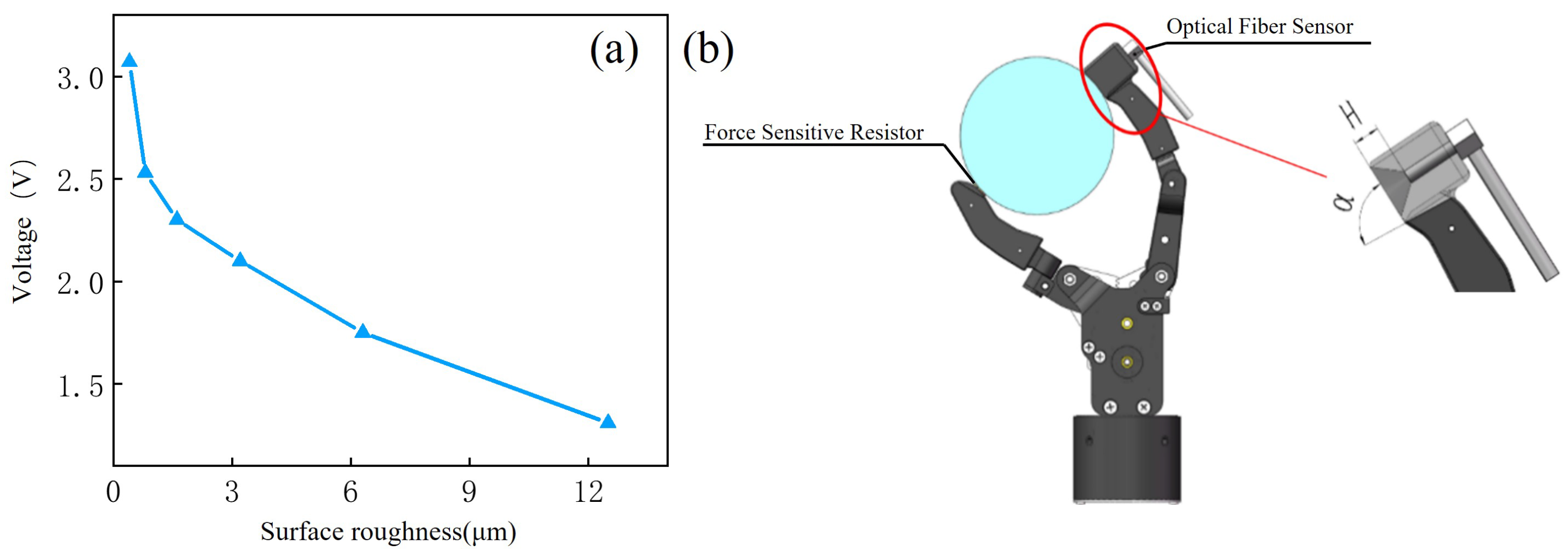
2.3. Design of a Perception System for the Prosthetic Hand
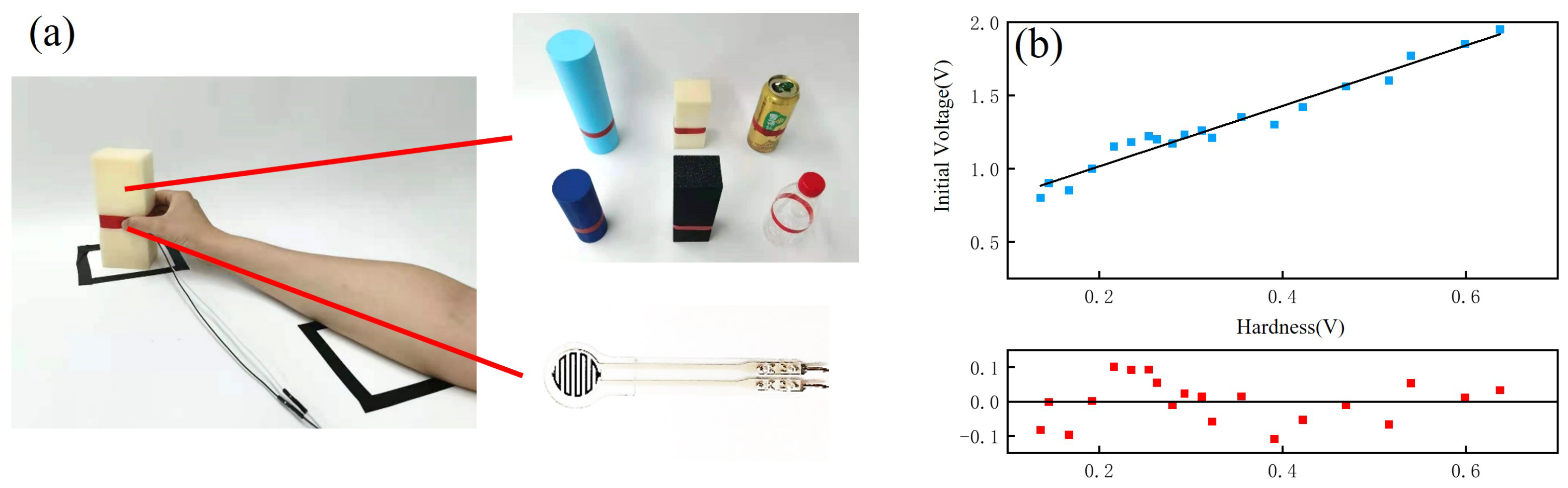
2.4. Establishment of Mapping Relationships
2.5. Application of Mapping Relationships to the Control Strategy Based on Perceptual Information
3. Prosthetic Hand Grasping Experiments and Results Analysis
3.1. Grip Force Control Experiments and Results Analysis
3.2. Sliding Inhibition Experiments and Results Analysis
3.3. Gripping Experiments under Extreme Conditions and Results Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Diamond, M.E. Texture sensation through the fingertips and the whiskers. Curr. Opin. Neurobiol. 2010, 20, 319–327. [Google Scholar] [CrossRef]
- Keser, S.; Hayber, Ş.E. Fiber optic tactile sensor for surface roughness recognition by machine learning algorithms. Sens. Actuators A Phys. 2021, 332, 113071. [Google Scholar] [CrossRef]
- Preti, M.L.; Totaro, M.; Falotico, E.; Beccai, L. Optical-based Technologies for Artificial Soft Tactile Sensing. In Electronic Skin: Sensors and Systems; River Publishers: Aalborg, Denmark, 2022; p. 73. [Google Scholar]
- Huang, Y.; Yuan, H.; Kan, W.; Guo, X.; Liu, C.; Liu, P. A flexible three-axial capacitive tactile sensor with multilayered dielectric for artificial skin applications. Microsyst. Technol. 2017, 23, 1847–1852. [Google Scholar] [CrossRef]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible capacitive tactile sensor based on micropatterned dielectric layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-inspired piezoelectric tactile sensor array with crosstalk-free row+ column electrodes for spatiotemporally distinguishing diverse stimuli. Adv. Sci. 2021, 8, 2002817. [Google Scholar] [CrossRef]
- Kim, M.S.; Ahn, H.R.; Lee, S.; Kim, C.; Kim, Y.J. A dome-shaped piezoelectric tactile sensor arrays fabricated by an air inflation technique. Sens. Actuators A Phys. 2014, 212, 151–158. [Google Scholar] [CrossRef]
- Romeo, R.A.; Oddo, C.M.; Carrozza, M.C.; Guglielmelli, E.; Zollo, L. Slippage detection with piezoresistive tactile sensors. Sensors 2017, 17, 1844. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, J.; Lin, Z.; Huang, S.; Wang, H.; Wu, H. A piezoresistive tactile sensor for a large area employing neural network. Sensors 2019, 19, 27. [Google Scholar] [CrossRef]
- Gast, S.; Zimmermann, K.; Minchenya, V.T.; Lysenko, V.G. Modelling and magnetic field simualtion of a tactile sensor based on magneto-sensitive elastomers. Theor. Appl. Mech. 2019, 34, 28–35. [Google Scholar]
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel tactile sensor technology and smart tactile sensing systems: A review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Yin, J.; Aspinall, P.; Santos, V.J.; Posner, J.D. Measuring dynamic shear force and vibration with a bioinspired tactile sensor skin. IEEE Sens. J. 2018, 18, 3544–3553. [Google Scholar] [CrossRef]
- Sani, H.N.; Meek, S.G. Characterizing the performance of an optical slip sensor for grip control in a prosthesis. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1927–1932. [Google Scholar]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 5747. [Google Scholar] [CrossRef]
- Salisbury, L.L.; Colman, A.B. A mechanical hand with automatic proportional control of prehension. Med. Biol. Eng. 1967, 5, 505–511. [Google Scholar] [CrossRef]
- Matulevich, B.; Loeb, G.E.; Fishel, J.A. Utility of contact detection reflexes in prosthetic hand control. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4741–4746. [Google Scholar] [CrossRef]
- Thomas, N.; Fazlollahi, F.; Brown, J.D.; Kuchenbecker, K.J. Sensorimotor-inspired tactile feedback and control improve consistency of prosthesis manipulation in the absence of direct vision. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6174–6181. [Google Scholar]
- Schwartz, A.B. Movement: How the Brain Communicates with the World. Cell 2016, 164, 1122–1135. [Google Scholar] [CrossRef]
- Cole, K.J.; Abbs, J.H. Grip force adjustments evoked by load force perturbations of a grasped object. J. Neurophysiol. 1988, 60, 1513–1522. [Google Scholar] [CrossRef]
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 2009, 10, 345–359. [Google Scholar] [CrossRef]
- Napier, J.R. Studies of the hands of living primates. Proc. Zool. Soc. Lond. 1960, 134, 647–657. [Google Scholar] [CrossRef]
- Almécija, S.; Sherwood, C. Hands, brains, and precision grips: Origins of tool use behaviors. In Evolution of Nervous Systems; Elsevier: Amsterdam, The Netherlands, 2017; pp. 299–315. [Google Scholar]
- Cotton, D.P.J.; Chappell, P.H.; Cranny, A.; White, N.M.; Beeby, S.P. A novel thick-film piezoelectric slip sensor for a prosthetic hand. IEEE Sens. J. 2007, 7, 752–761. [Google Scholar] [CrossRef]
- Kyberd, P. Slip detection strategies for automatic grasping in prosthetic hands. Sensors 2023, 23, 4433. [Google Scholar] [CrossRef]
- Li, Z.; He, S. Advances in friction-induced vibration in applied engineering. Coatings 2023, 13, 786. [Google Scholar] [CrossRef]
- Kyberd, P.J.; Chappell, P.H. Object-slip detection during manipulation using a derived force vector. Mechatronics 1992, 2, 1–13. [Google Scholar] [CrossRef]
- Pasluosta, C.F.; Tims, H.; Chiu, A.W.L. Slippage sensory feedback and nonlinear force control system for a low-cost prosthetic hand. Am. J. Biomed. Sci. 2009, 1, 295–302. [Google Scholar] [CrossRef]
- Ottobock. SensorHand-Speed. Available online: https://shop.ottobock.us/Prosthetics/Upper-Limb-Prosthetics/Myo-Hands-and-Components/Myo-Terminal-Devices/SensorHand-Speed/p/8E38~58#product-documents-section (accessed on 24 April 2024).
- Bandyopadhyaya, I.; Babu, D.; Kumar, A.; Roychowdhury, J. Tactile sensing based softness classification using machine learning. Proceedings of th 2014 IEEE International Advance Computing Conference (IACC), Gurgaon, India, 21–22 February 2014; pp. 1231–1236. [Google Scholar]
- Zhang, X.; Wang, H.; Huang, Y. Research on robotic grasping object hardness perception based on tactile sensing. J. Mech. Eng. 2021, 57, 12–20. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardness | Strategy A | Strategy B |
|---|---|---|
| 15 HA | 84.8% | 0% |
| 24 HA | 90.6% | 0% |
| 35 HA | 91% | 0% |
| 45 HA | 91.4% | 0% |
| 57 HA | 92.2% | 32.6% |
| 70 HA | 94% | 86.4% |
| Weight | Strategy A | Strategy B |
|---|---|---|
| 400 g | 98.6% | 98.2% |
| 600 g | 96.2% | 95.4% |
| 800 g | 96.4% | 94.6% |
| 1500 g | 91.6% | 85.4% |
| 2000 g | 89.4% | 78.8% |
| 2500 g | 59.2% | 46% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Tian, Y.; Li, Z.; She, H.; Jiang, Z. Research on Adaptive Grasping with a Prosthetic Hand Based on Perceptual Information on Hardness and Surface Roughness. Micromachines 2024, 15, 675. https://doi.org/10.3390/mi15060675
Wang Y, Tian Y, Li Z, She H, Jiang Z. Research on Adaptive Grasping with a Prosthetic Hand Based on Perceptual Information on Hardness and Surface Roughness. Micromachines. 2024; 15(6):675. https://doi.org/10.3390/mi15060675
Chicago/Turabian StyleWang, Yuxuan, Ye Tian, Zhenyu Li, Haotian She, and Zhihong Jiang. 2024. "Research on Adaptive Grasping with a Prosthetic Hand Based on Perceptual Information on Hardness and Surface Roughness" Micromachines 15, no. 6: 675. https://doi.org/10.3390/mi15060675