
Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining
Abstract
:1. Introduction
2. Magnetic Field Generation Device and Sampling Device
2.1. Requirement Analysis of the Magnetic Field Generation Device
2.1.1. Strength and Flexibility
2.1.2. Accuracy
2.1.3. Safety
2.2. Hardware Design of the Magnetic Field Generation Device
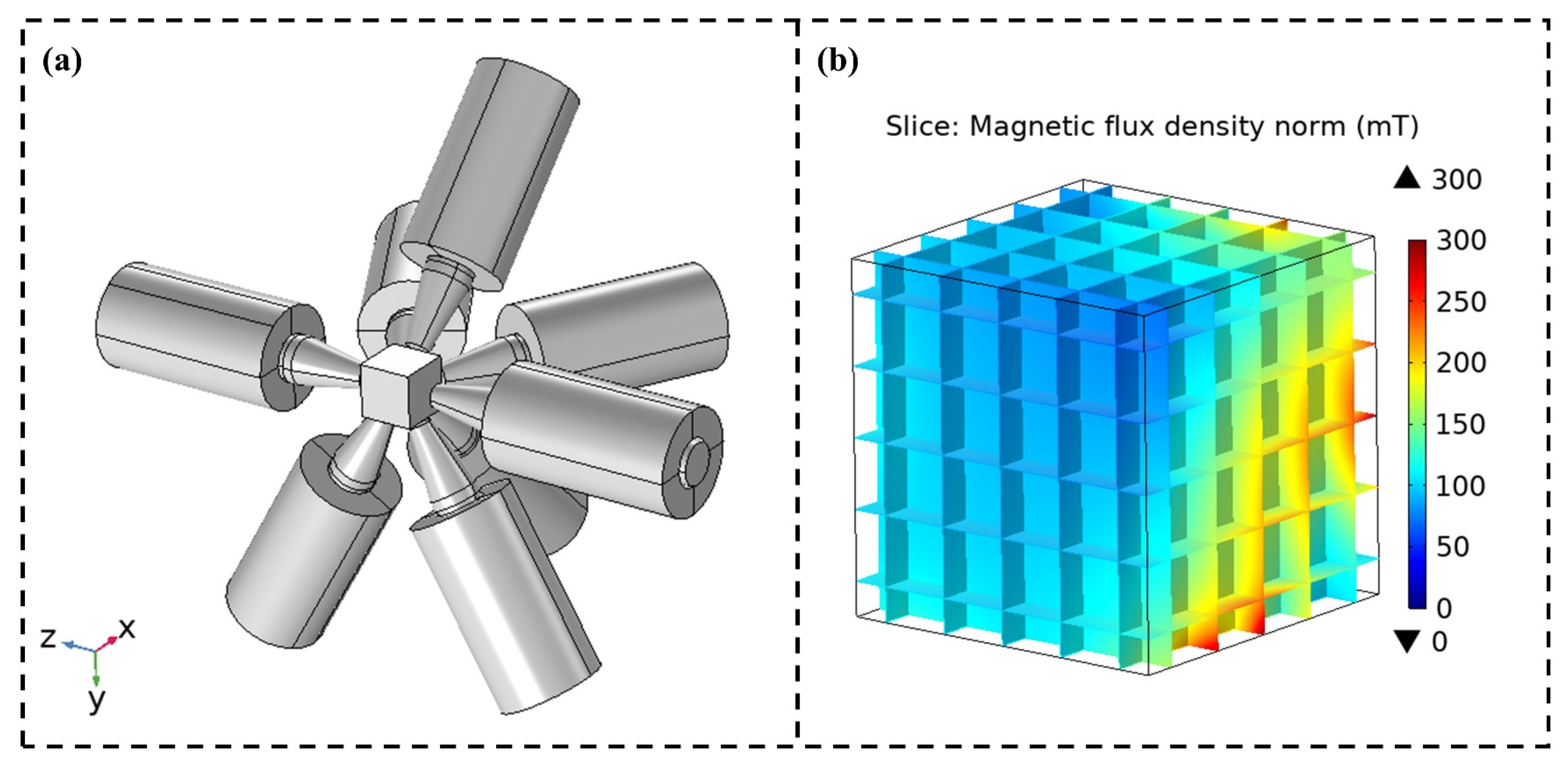
2.2.1. Electromagnetic Coil Group
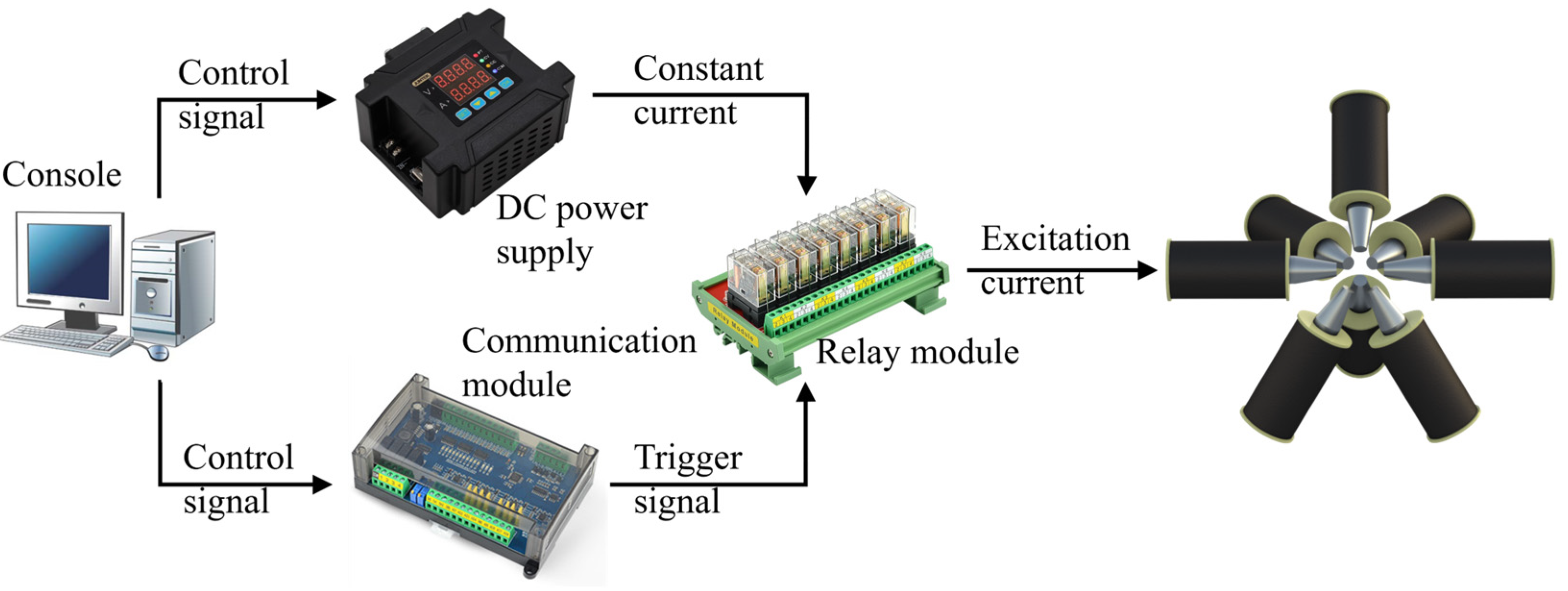
2.2.2. Drive System
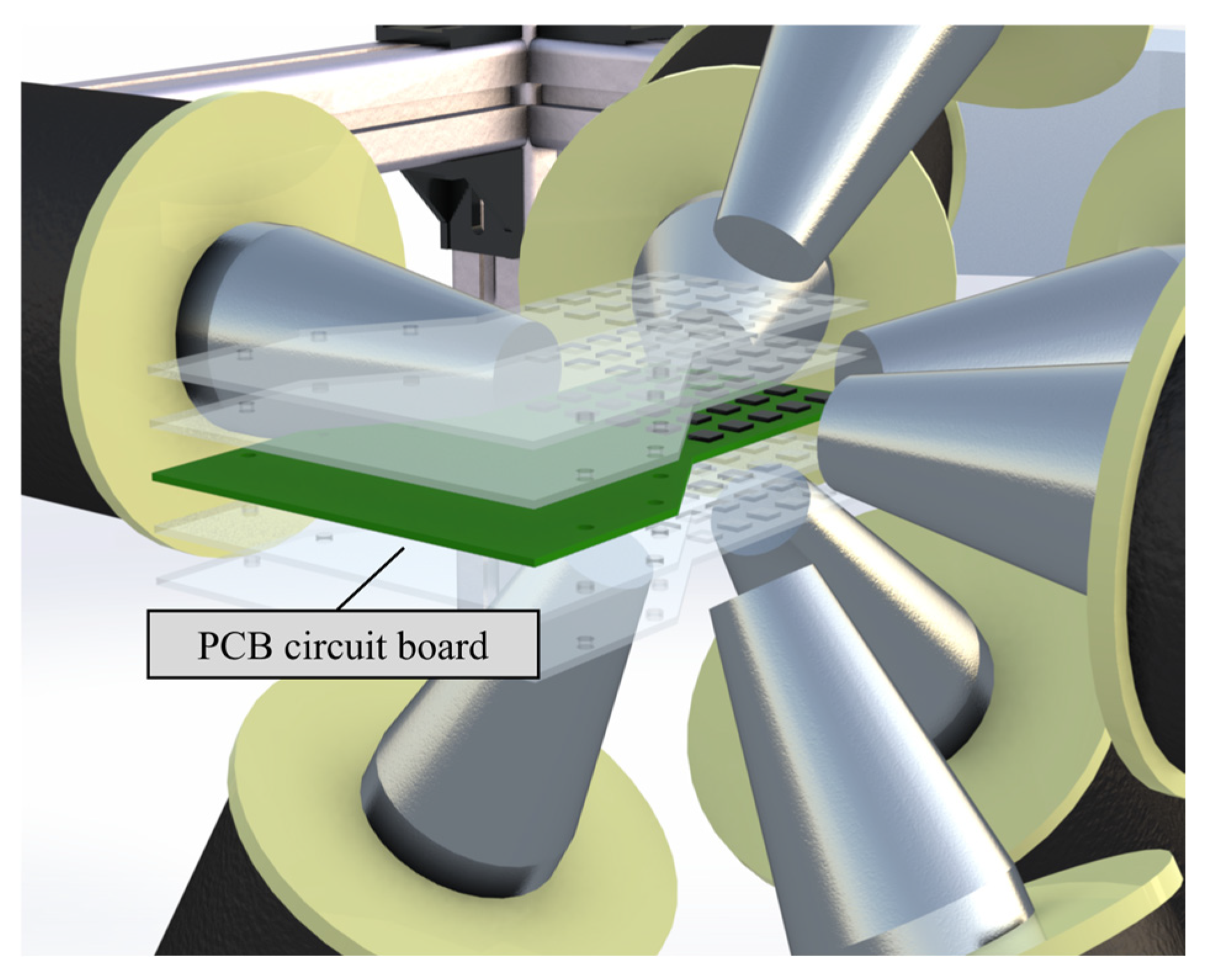
2.3. Sampling Device
3. Establishment and Calibration of the Mathematical Model
3.1. Spherical Harmonic Function Expansion Model
3.1.1. Establishment of the Spherical Harmonic Function Expansion Model
3.1.2. Calibration of the Spherical Harmonic Function Expansion Model
3.2. Magnetic Multipole Superposition Model
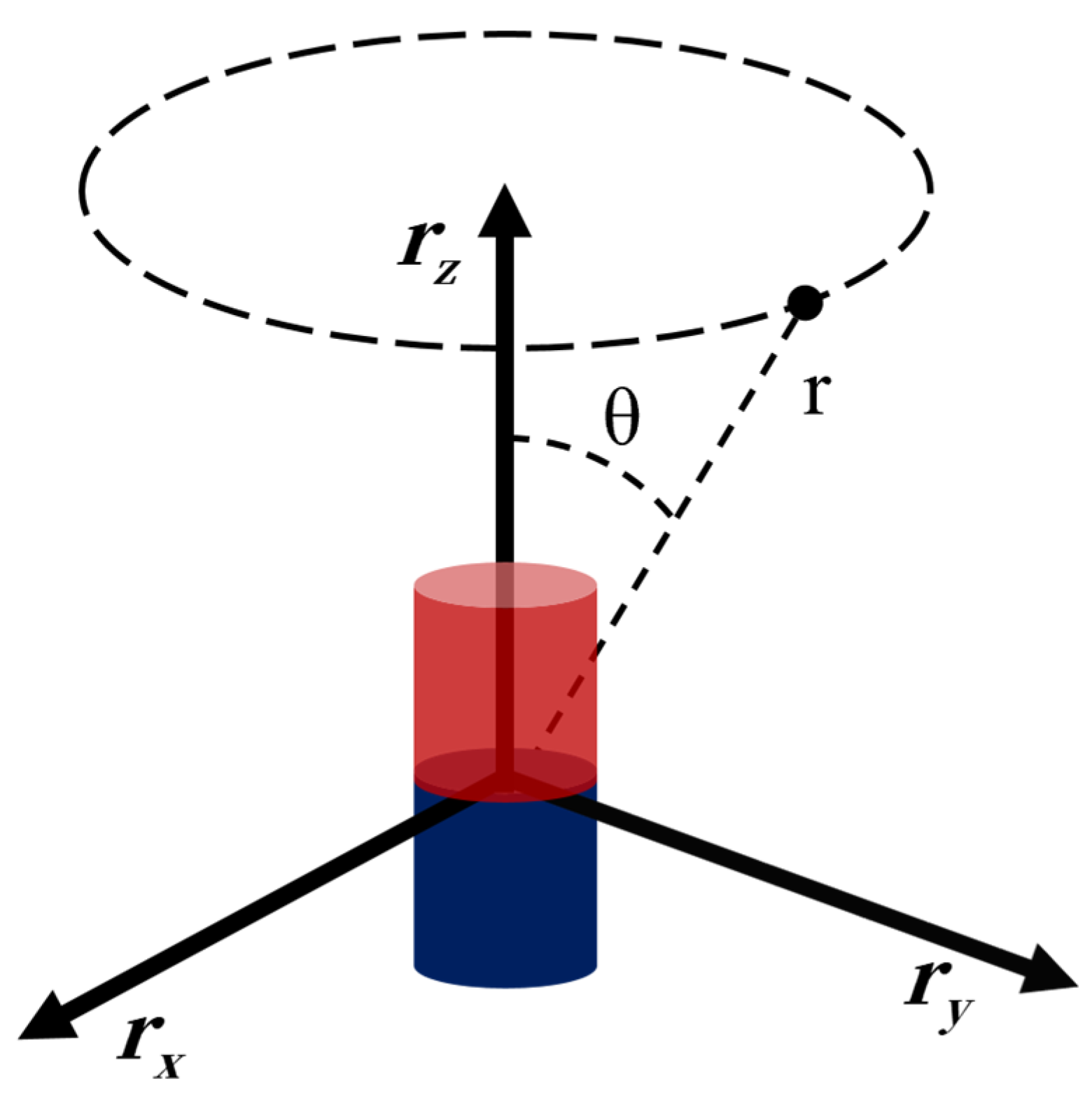
3.2.1. Establishment of the Magnetic Multipole Superposition Model
3.2.2. Calibration of the Magnetic Multipole Superposition Model
4. Performance Evaluation and Inverse Solution Algorithm
4.1. Performance Evaluation
4.2. Inverse Solution Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Model Optimization Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B1 | B2 | ||||||
|---|---|---|---|---|---|---|---|
| 1.852 × 10−6 | 4.786 × 10−8 | 0.0698 | 0.0477 | −0.0137 | 0.6597 | 0.7502 | −0.0456 |
| −3.356 × 10−7 | −2.175 × 10−8 | 0.0108 | 0.0396 | −0.0813 | 0.3181 | 0.9303 | −0.1826 |
| −1.463 × 10−5 | −2.267 × 10−7 | 0.0117 | 0.0188 | 0.1031 | 0.2565 | 0.8825 | 0.3941 |
| 4.173 × 10−6 | 1.075 × 10−7 | 0.0032 | 0.0048 | 0.0796 | 0.1477 | 0.2348 | 0.9608 |
| 2.114 × 10−8 | 1.603 × 10−10 | 0.0347 | −0.0394 | 0.0053 | 0.6810 | −0.6341 | 0.3662 |
| 1.254 × 10−7 | −4.952 × 10−14 | 0.0525 | 0.0042 | 0.0334 | 0.8276 | 0.4058 | −0.3878 |
| −3.020 × 10−5 | 4.242 × 10−6 | 0.0482 | 0.0301 | 0.1828 | −0.1998 | −0.8720 | 0.4468 |
| −2.038 × 10−10 | −2.123 × 10−7 | −0.0033 | 0.0444 | 0.0470 | −0.1278 | 0.1424 | 0.9815 |
| −9.315 × 10−7 | 1.861 × 10−8 | 0.0303 | 0.0750 | −0.0452 | −0.7342 | 0.3069 | −0.6056 |
| 3.289 × 10−6 | −2.146 × 10−7 | 0.0488 | 0.0725 | 0.0169 | −0.0476 | −0.6596 | 0.7501 |
| −2.277 × 10−5 | 1.545 × 10−6 | 0.0718 | 0.0045 | −0.1313 | 0.2069 | −0.5240 | 0.8262 |
| −4.089 × 10−6 | 9.826 × 10−7 | 0.0482 | 0.0265 | 0.0947 | 0.7458 | 0.6565 | 0.1132 |
| −4.024 × 10−6 | −7.492 × 10−7 | 0.0913 | 0.0075 | 0.0504 | 0.5464 | −0.0004 | −0.8375 |
| −2.234 × 10−7 | −1.460 × 10−13 | 0.0547 | −0.0352 | 0.0067 | −0.7220 | 0.2404 | 0.6488 |
| −2.204 × 10−7 | −6.420 × 10−7 | 0.0443 | −0.0147 | 0.0502 | 0.4075 | 0.3974 | 0.8222 |
| 9.224 × 10−6 | 2.287 × 10−10 | 0.0321 | 0.0199 | 0.0811 | 0.5022 | 0.8415 | −0.1992 |
| 6.717 × 10−6 | 1.697 × 10−7 | 0.0478 | 0.0607 | 0.0267 | 0.6202 | 0.7754 | −0.1186 |
| 4.741 × 10−5 | −7.232 × 10−6 | 0.1116 | 0.0198 | −0.1557 | 0.3856 | −0.5686 | 0.7266 |
| −1.727 × 10−5 | −8.702 × 10−7 | 0.0738 | −0.0122 | −0.0524 | 0.4298 | 0.5317 | −0.7297 |
| −4.331 × 10−6 | 6.224 × 10−7 | 0.0467 | 0.0237 | −0.0946 | −0.2567 | −0.7893 | −0.5578 |
| 4.592 × 10−6 | 2.293 × 10−7 | 0.0384 | 0.0678 | −0.0160 | 0.9925 | 0.0813 | −0.0914 |
| −1.777 × 10−6 | −1.627 × 10−8 | 0.0351 | 0.0529 | 0.0028 | 0.4392 | 0.7355 | −0.5160 |
| −1.254 × 10−6 | −3.332 × 10−7 | 0.0717 | −0.0272 | −0.0259 | 0.3902 | 0.3405 | −0.8554 |
| 8.302 × 10−6 | 7.296 × 10−7 | 0.0834 | −0.0276 | −0.0207 | 0.7731 | 0.2892 | −0.5645 |
| −2.976 × 10−6 | 1.502 × 10−6 | 0.0736 | 0.0104 | −0.0815 | 0.7901 | −0.5037 | 0.3493 |
| 2.347 × 10−6 | 1.307 × 10−7 | 0.0378 | 0.0632 | −0.0164 | 0.1541 | 0.9362 | 0.3160 |
| −1.454 × 10−7 | −1.083 × 10−8 | 0.0306 | −0.0142 | 0.0818 | 0.8138 | −0.3038 | 0.4954 |
| 3.052 × 10−5 | 1.829 × 10−6 | −0.0053 | 0.0265 | −0.1096 | −0.1837 | 0.5165 | −0.8363 |
| −2.241 × 10−6 | −4.479 × 10−8 | −0.0414 | 0.0448 | −0.0571 | 0.1105 | 0.3891 | −0.9145 |
| 1.376 × 10−5 | 2.284 × 10−8 | −0.1551 | 0.0433 | 0.0025 | −0.3551 | 0.6283 | 0.6923 |
| 7.440 × 10−8 | −3.685 × 10−7 | 0.0486 | −0.0513 | −0.0245 | 0.1860 | −0.3111 | −0.9320 |
| −2.283 × 10−7 | 1.303 × 10−8 | 0.0577 | 0.0095 | −0.0450 | −0.3503 | 0.6881 | 0.6355 |
| −1.054 × 10−4 | −9.663 × 10−6 | −0.1504 | −0.0692 | −0.1045 | −0.6370 | 0.1212 | −0.7613 |
| 1.512 × 10−4 | −2.765 × 10−5 | 0.2174 | 0.0112 | −0.0827 | −0.6203 | −0.7406 | −0.2582 |
| −3.677 × 10−6 | 9.614 × 10−8 | 0.0651 | 0.0575 | −0.0472 | 0.8263 | −0.2458 | 0.5068 |
| 5.837 × 10−6 | 4.996 × 10−7 | 0.1177 | 0.0170 | 0.0406 | 0.4758 | 0.5828 | 0.6588 |
| 1.625 × 10−5 | 3.578 × 10−7 | 0.0333 | 0.0754 | −0.0272 | 0.3182 | 0.7283 | −0.6070 |
| −7.833 × 10−6 | 2.160 × 10−7 | 0.0331 | 0.0776 | −0.0544 | 0.3613 | 0.4606 | −0.8108 |
| 5.153 × 10−6 | 6.177 × 10−7 | −0.0508 | 0.0196 | 0.0854 | −0.1789 | −0.3363 | −0.9246 |
| 1.361 × 10−5 | −7.680 × 10−7 | 0.0749 | 0.0322 | 0.0622 | 0.5451 | −0.7035 | −0.4560 |
| −3.531 × 10−6 | −9.370 × 10−8 | 0.0658 | 0.0448 | −0.0305 | 0.2611 | 0.9635 | −0.0598 |
| 8.517 × 10−6 | 2.812 × 10−7 | 0.0725 | 0.0184 | 0.0514 | −0.0971 | 0.7650 | 0.6367 |
| 9.883 × 10−6 | 6.359 × 10−8 | −0.0521 | 0.0121 | 0.0701 | 0.2541 | 0.1740 | 0.9514 |
| −1.207 × 10−5 | −4.261 × 10−7 | 0.0005 | 0.0857 | 0.0466 | 0.8180 | 0.4105 | 0.4028 |
| −8.291 × 10−7 | 4.109 × 10−10 | 0.0427 | −0.0511 | 0.0040 | −0.4143 | −0.2761 | −0.8672 |
| −8.420 × 10−8 | 2.511 × 10−11 | 0.0362 | 0.0118 | −0.0459 | 0.8318 | −0.2021 | 0.5170 |
| −7.135 × 10−6 | −6.314 × 10−7 | 0.0213 | 0.0495 | −0.1078 | 0.3477 | 0.4793 | −0.8058 |
| 6.473 × 10−7 | 2.034 × 10−8 | −0.0171 | 0.0761 | 0.0128 | 0.5871 | 0.7730 | −0.2404 |
| 4.401 × 10−6 | 7.607 × 10−8 | 0.0502 | 0.0367 | −0.0005 | 0.4099 | −0.2998 | −0.8615 |
| −2.122 × 10−8 | −1.026 × 10−7 | 0.0593 | −0.0280 | 0.0013 | 0.8891 | 0.4388 | 0.1306 |
| 4.286 × 10−6 | −6.836 × 10−8 | 0.0500 | 0.0362 | −0.0004 | −0.4230 | 0.2836 | 0.8606 |
| −5.609 × 10−5 | −7.197 × 10−6 | −0.0644 | −0.1493 | 0.2044 | −0.1933 | −0.5460 | 0.8152 |
| −2.833 × 10−6 | −9.181 × 10−8 | −0.0044 | 0.0707 | −0.0434 | 0.8192 | 0.5451 | −0.1786 |
| 1.251 × 10−7 | −5.794 × 10−7 | 0.0010 | 0.0256 | 0.0718 | −0.1266 | −0.8044 | −0.5804 |
| 3.407 × 10−5 | 8.510 × 10−7 | 0.0501 | 0.0639 | −0.0597 | 0.6182 | 0.7481 | −0.2411 |
| 5.812 × 10−4 | −6.535 × 10−6 | 0.0160 | 0.2134 | −0.1578 | 0.9863 | 0.1606 | −0.0389 |
| 1.032× 10−3 | 6.605 × 10−5 | 0.1046 | 0.1774 | 0.1223 | 0.1763 | −0.3632 | −0.9149 |
| 5.091 × 10−5 | 1.290 × 10−6 | 0.0642 | 0.0507 | 0.0604 | 0.7504 | 0.6101 | 0.2543 |
| 7.110 × 10−5 | 3.165 × 10−6 | 0.0427 | −0.0449 | −0.1256 | 0.5227 | −0.1085 | −0.8456 |
| 3.336 × 10−5 | 7.948 × 10−7 | 0.0941 | 0.0150 | −0.0084 | 0.8902 | 0.4450 | −0.0972 |
| 1.061 × 10−4 | 5.742 × 10−6 | 0.0925 | −0.1154 | 0.0509 | 0.8438 | −0.4726 | 0.2542 |
| 5.430 × 10−5 | 1.417 × 10−6 | 0.0201 | 0.1022 | 0.0113 | 0.6045 | 0.7839 | 0.1420 |
| 6.705 × 10−6 | 2.280 × 10−7 | −0.0815 | −0.0779 | −0.0031 | −0.7106 | −0.6982 | −0.0871 |
| 2.785 × 10−6 | 3.386 × 10−8 | 0.0602 | −0.0327 | −0.0331 | −0.7289 | −0.6841 | −0.0255 |
| −9.890 × 10−6 | −8.819 × 10−7 | 0.0451 | 0.0964 | −0.1206 | 0.5812 | 0.0786 | −0.8100 |
| −1.453 × 10−5 | −4.015 × 10−7 | 0.0100 | 0.0066 | 0.1051 | 0.2996 | 0.2979 | 0.9064 |
| 4.225 × 10−6 | 1.039 × 10−7 | 0.0474 | −0.0370 | 0.0295 | −0.1598 | −0.9525 | −0.2591 |
| −3.992 × 10−6 | −5.271 × 10−7 | 0.0476 | −0.0508 | −0.0483 | −0.2556 | −0.5166 | −0.8172 |
| 3.676 × 10−6 | −1.225 × 10−7 | 0.0480 | −0.0379 | 0.0294 | 0.2667 | 0.9300 | 0.2528 |
| 3.351 × 10−6 | 8.210 × 10−7 | 0.0487 | −0.0548 | −0.0518 | 0.5609 | 0.4584 | 0.6893 |
| 1.415 × 10−5 | −8.976 × 10−6 | 0.0662 | 0.0309 | 0.1660 | 0.5868 | 0.3099 | 0.7481 |
| 3.708 × 10−5 | 2.469 × 10−8 | 0.1169 | 0.0297 | 0.0940 | −0.8309 | −0.2987 | 0.4695 |
References
- Shao, Y.; Fahmy, A.; Li, M.; Li, C.X.; Zhao, W.C.; Sienz, J. Study on Magnetic Control Systems of Micro-Robots. Front. Neurosci. 2021, 15, 736730. [Google Scholar] [CrossRef] [PubMed]
- Ching, H.L.; Hale, M.F.; McAlindon, M.E. Current and Future Role of Magnetically Assisted Gastric Capsule Endoscopy in the Upper Gastrointestinal Tract. Ther. Adv. Gastroenterol. 2016, 9, 313–321. [Google Scholar] [CrossRef]
- Ciuti, G.; Donlin, R.; Valdastri, P.; Arezzo, A.; Menciassi, A.; Morino, M.; Dario, P. Robotic Versus Manual Control in Magnetic Steering of an Endoscopic Capsule. Endoscopy 2010, 42, 148–152. [Google Scholar] [CrossRef]
- Pittiglio, G.; Barducci, L.; Martin, J.W.; Norton, J.C.; Avizzano, C.A.; Obstein, K.L.; Valdastri, P. Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated with a Single Permanent Magnet: A Dynamic Control Approach. IEEE Robot. Autom. Lett. 2019, 4, 1224–1231. [Google Scholar] [CrossRef]
- Ryan, P.; Diller, E. Magnetic Actuation for Full Dexterity Microrobotic Control Using Rotating Permanent Magnets. IEEE Trans. Robot. 2017, 33, 1398–1409. [Google Scholar] [CrossRef]
- Taddese, A.Z.; Slawinski, P.R.; Obstein, K.L.; Valdastri, P. Nonholonomic Closed-Loop Velocity Control of a Soft-Tethered Magnetic Capsule Endoscope. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 1139–1144. [Google Scholar]
- Armacost, M.P.; Adair, J.; Munger, T.; Viswanathan, R.R.; Creighton, F.M.; Curd, D.T.; Sehra, R. Accurate and Reproducible Target Navigation with the Stereotaxis Niobe® Magnetic Navigation System. J. Cardiovasc. Electrophysiol. 2007, 18, S26–S31. [Google Scholar] [CrossRef]
- Zarrouk, A.; Belharet, K.; Tahri, O.; Ferreira, A. A Four-Magnet System for 2D Wireless Open-Loop Control of Microrobots. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 883–888. [Google Scholar]
- Yang, Z.X.; Li, Z. Magnetic Actuation Systems for Miniature Robots: A Review. Adv. Intell. Syst. 2020, 2, 2000082. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Sitti, M. Independent Control of Multiple Magnetic Microrobots in Three Dimensions. Int. J. Robot. Res. 2013, 32, 614–631. [Google Scholar] [CrossRef]
- Salmanipour, S.; Diller, E. Eight-Degrees-of-Freedom Remote Actuation of Small Magnetic Mechanisms. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3608–3613. [Google Scholar]
- Yang, L.; Du, X.; Yu, E.; Jin, D.; Zhang, L. Deltamag: An Electromagnetic Manipulation System with Parallel Mobile Coils. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9814–9820. [Google Scholar]
- Zhang, Q.; Song, S.; He, P.; Li, H.; Mi, H.Y.; Wei, W.; Li, Z.X.; Xiong, X.Z.; Li, Y.M. Motion Control of Magnetic Microrobot Using Uniform Magnetic Field. IEEE Access 2020, 8, 71083–71092. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. Octomag: An Electromagnetic System for 5-Dof Wireless Micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Marino, H.; Bergeles, C.; Nelson, B.J. Robust Electromagnetic Control of Microrobots under Force and Localization Uncertainties. IEEE Trans. Autom. Sci. Eng. 2014, 11, 310–316. [Google Scholar] [CrossRef]
- Kratochvil, B.E.; Kummer, M.P.; Erni, S.; Borer, R.; Frutiger, D.R.; Schürle, S.; Nelson, B.J. Minimag: A Hemispherical Electromagnetic System for 5-Dof Wireless Micromanipulation. In Experimental Robotics: The 12th International Symposium on Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 317–329. [Google Scholar]
- Sikorski, J.; Dawson, I.; Denasi, A.; Hekman, E.E.G.; Misra, S. Introducing Bigmag—A Novel System for 3D Magnetic Actuation of Flexible Surgical Manipulators. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3594–3599. [Google Scholar]
- Hu, C.; Li, M.; Song, S.; Yang, W.A.; Zhang, R.; Meng, M.Q.H. A Cubic 3-Axis Magnetic Sensor Array for Wirelessly Tracking Magnet Position and Orientation. IEEE Sens. J. 2010, 10, 903–913. [Google Scholar] [CrossRef]
- Petruska, A.J.; Edelmann, J.; Nelson, B.J. Model-Based Calibration for Magnetic Manipulation. IEEE Trans. Magn. 2017, 53, 4900206. [Google Scholar] [CrossRef]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Long, M.; Romanova, M.M.; Lamb, F.K. Accretion onto Stars with Octupole Magnetic Fields: Matter Flow, Hot Spots and Phase Shifts. New Astron. 2012, 17, 232–245. [Google Scholar] [CrossRef]





| Type | Measurement Range (mT) | Gain Control Function | Sensitivity (LSB/mT) | Measurement Dimension | Output Data (bit) |
|---|---|---|---|---|---|
| MLX90393 | 5–50 | Yes | 311–6211 | Three axes | 12 |
| ALS31300 | 100 | No | 20 | Three axes | 16 |
| Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| (m) | 0.0033 | 0.0685 | 0.0725 | 0.0256 | −0.0013 | −0.0044 | 0.0499 | 0.0830 |
| (m) | 0.0074 | −0.018 | −0.0019 | 0.0234 | 0.0712 | 0.0695 | 0.0661 | −0.0285 |
| (m) | 0.0974 | 0.0502 | −0.0437 | −0.0665 | 0.0443 | −0.0451 | 0.0012 | 0.0027 |
| Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| 5.837 | 5.800 | 3.972 | −11.831 | −11.551 | −13.945 | −2.017 | −7.145 | |
| −10.782 | −4.496 | −17.726 | −8.996 | −0.345 | −3.796 | 11.462 | −6.575 | |
| −6.196 | 7.456 | 1.723 | 3.368 | 0.256 | −1.329 | 1.188 | 0.037 | |
| −4.353 | 2.008 | −2.043 | −0.761 | 0.389 | 0.726 | −0.903 | −1.201 | |
| 0.716 | −0.041 | 1.838 | −0.512 | −0.822 | −0.641 | −1.757 | 0.290 | |
| −2.954 | 1.278 | 0.412 | −0.454 | −0.461 | 0.725 | −0.099 | −0.051 | |
| −0.163 | −0.025 | −0.002 | 0.005 | 0.003 | −0.007 | 0.011 | 0.050 | |
| 0.053 | −0.042 | 0.042 | −0.001 | 0.012 | −0.001 | 0.066 | −0.037 | |
| 0.035 | 0.015 | −0.027 | −0.002 | −0.006 | −0.013 | 0.001 | −0.005 |
| Spherical Harmonic Function Expansion | Multipole Superposition | |
|---|---|---|
| RMSE (mT) | 0.71 | 1.66 |
| error percentage (%) | 2.986 | 6.981 |
| 0.9977 | 0.9935 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, C.; Zhuang, W.; He, J. Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining. Micromachines 2024, 15, 1002. https://doi.org/10.3390/mi15081002
Guo C, Zhuang W, He J. Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining. Micromachines. 2024; 15(8):1002. https://doi.org/10.3390/mi15081002
Chicago/Turabian StyleGuo, Cheng, Weizhen Zhuang, and Jingwen He. 2024. "Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining" Micromachines 15, no. 8: 1002. https://doi.org/10.3390/mi15081002