
An Adaptive Noise Reduction Method for High Temperature and Low Voltage Electromagnetic Detection Signals Based on SVMD Combined with ICEEMDAN
Abstract
:1. Introduction
2. Foundation
2.1. HHO Aptimizes SVMD Algorithm
2.2. CC Threshold
2.3. ICEEMDAN Algorithm
3. Methodology
3.1. SVIC Noise Reduction Method
3.2. Implementation of the Algorithm
- (1)
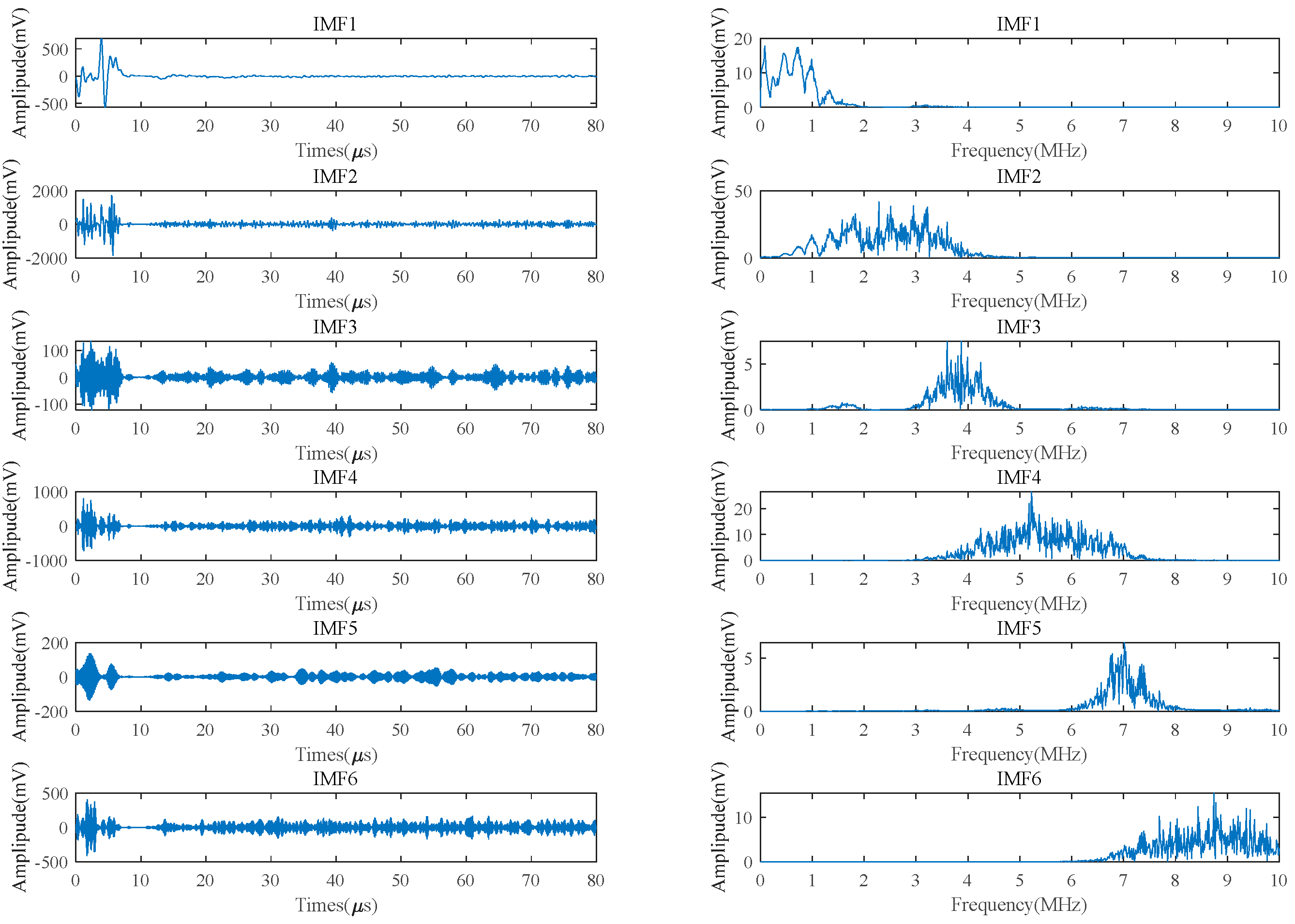
- The minimum envelope entropy is taken as the fitness function, and the HHO algorithm is used to optimize SVMD to get the optimal balance parameters. Then, the input signal is decomposed by SVMD to obtain IMF, and the center frequency of each IMF component is calculated by Fourier transform and arranged from low frequency to high frequency.
- (2)
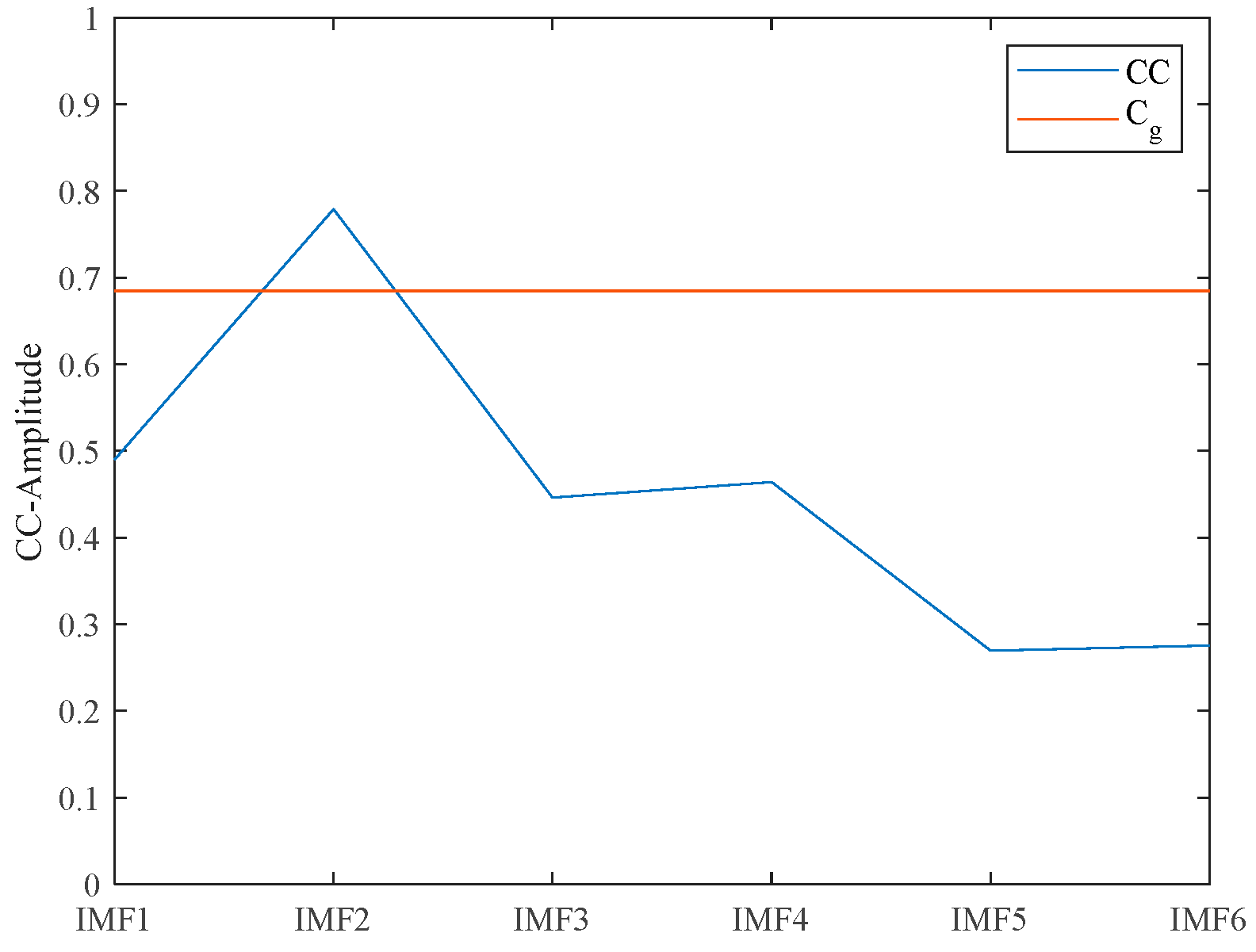
- Low -frequency and high -frequency noise can be removed according to the excitation center frequency of the ultrasonic signal. Since there are two or more IMF components decomposed by SVMD that contain excitation frequencies at the same time, for IMF components containing excitation frequencies, the CC can be calculated, and the CC threshold analysis can adaptively select the optimal IMF as a useful signal.
- (3)
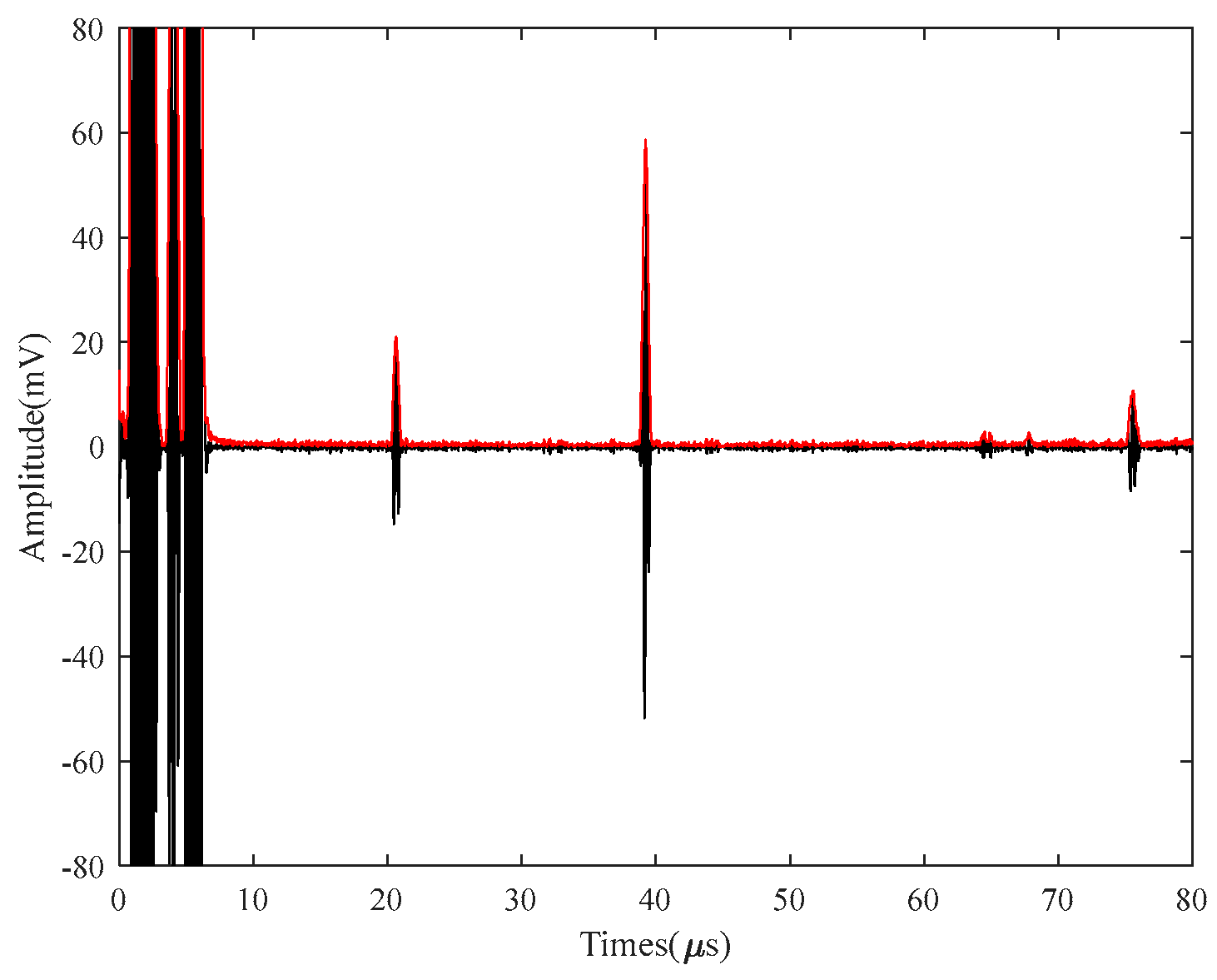
- ICEEMDAN decomposition is performed on the useful signal containing noise selected in step 2, and the kurtosis factor of each IMF component is calculated. Using the kurtosis factor as an index, the IMF function with the largest kurtosis factor is selected as the extracted echo signal, and the final signal is obtained by Hilbert transformation.
4. High-Temperature Testing Experiments
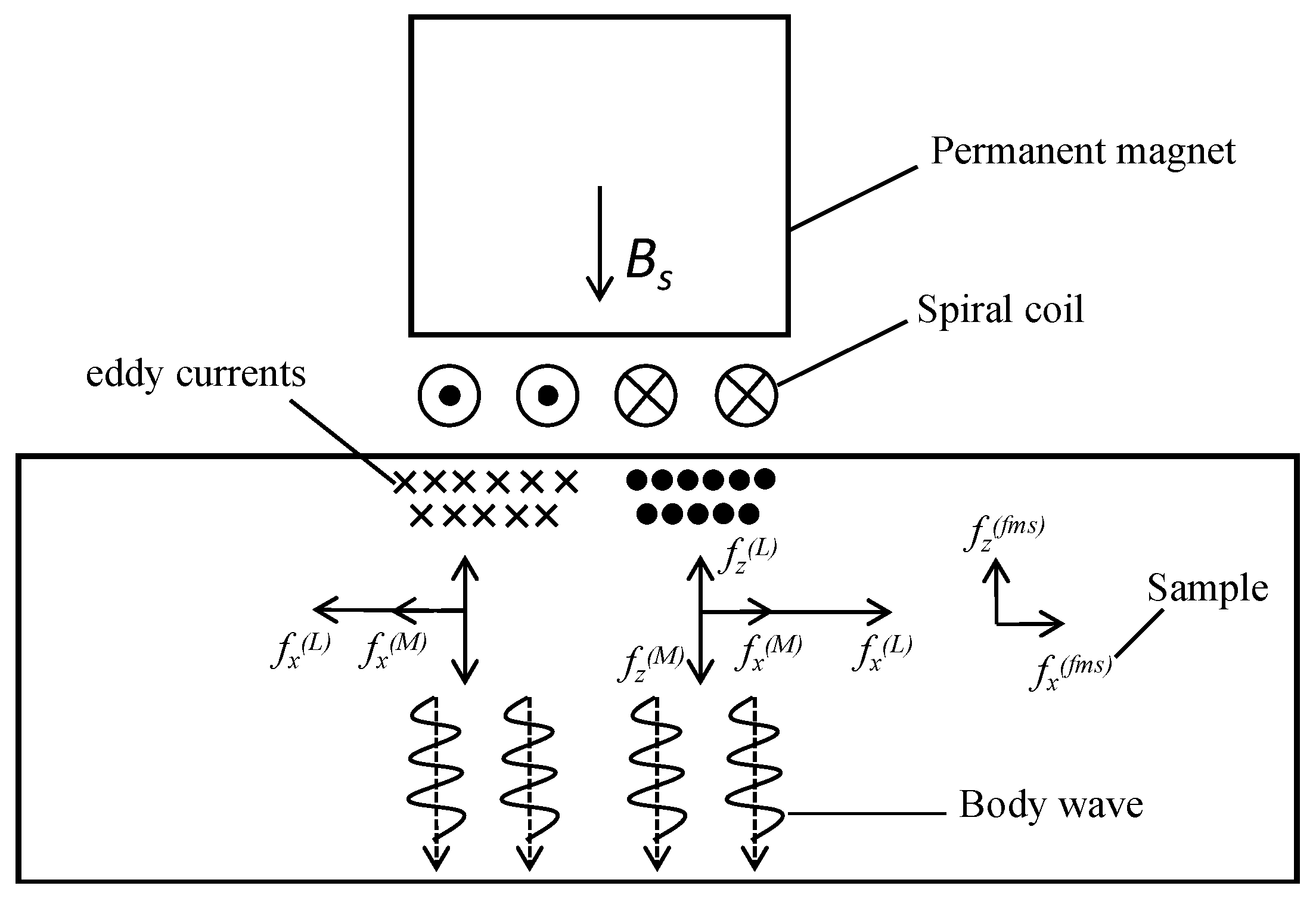
4.1. Basic Theory of the EMAT
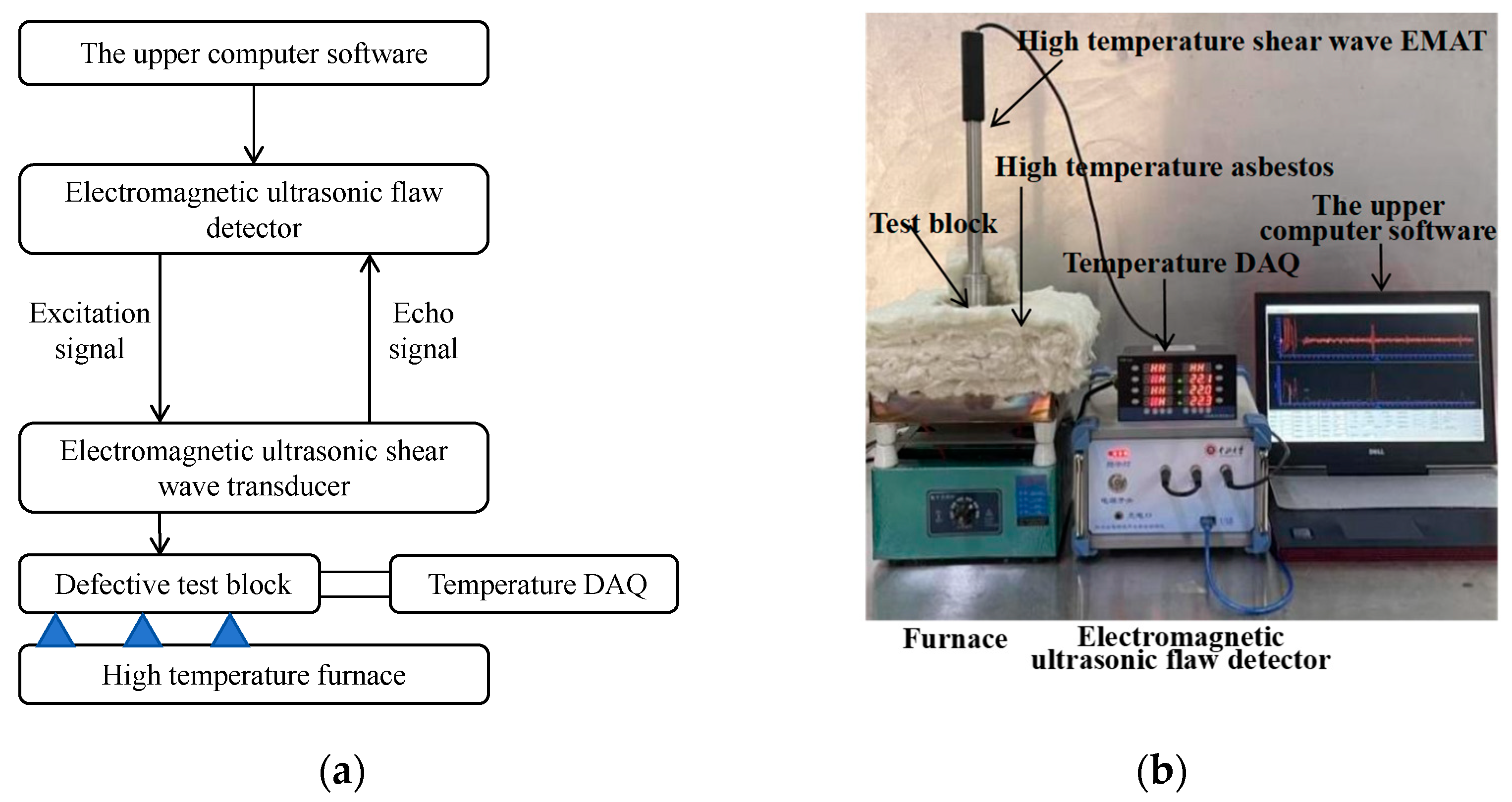
4.2. High-Temperature Experiment System
5. Analysis and Discussion of Results
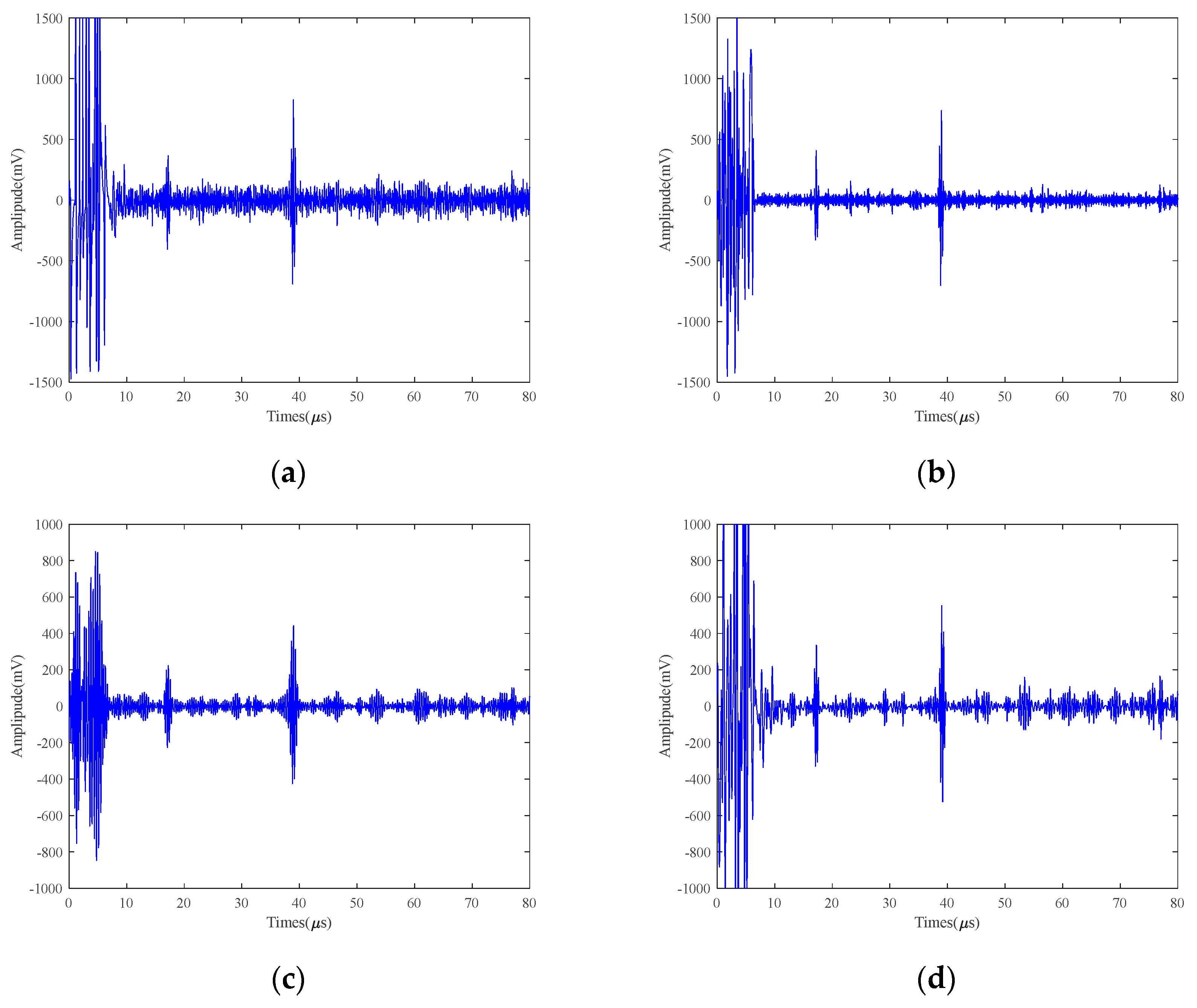
5.1. Comparative Study of the Ability of Different Methods to Detect Defects under LEV Conditions
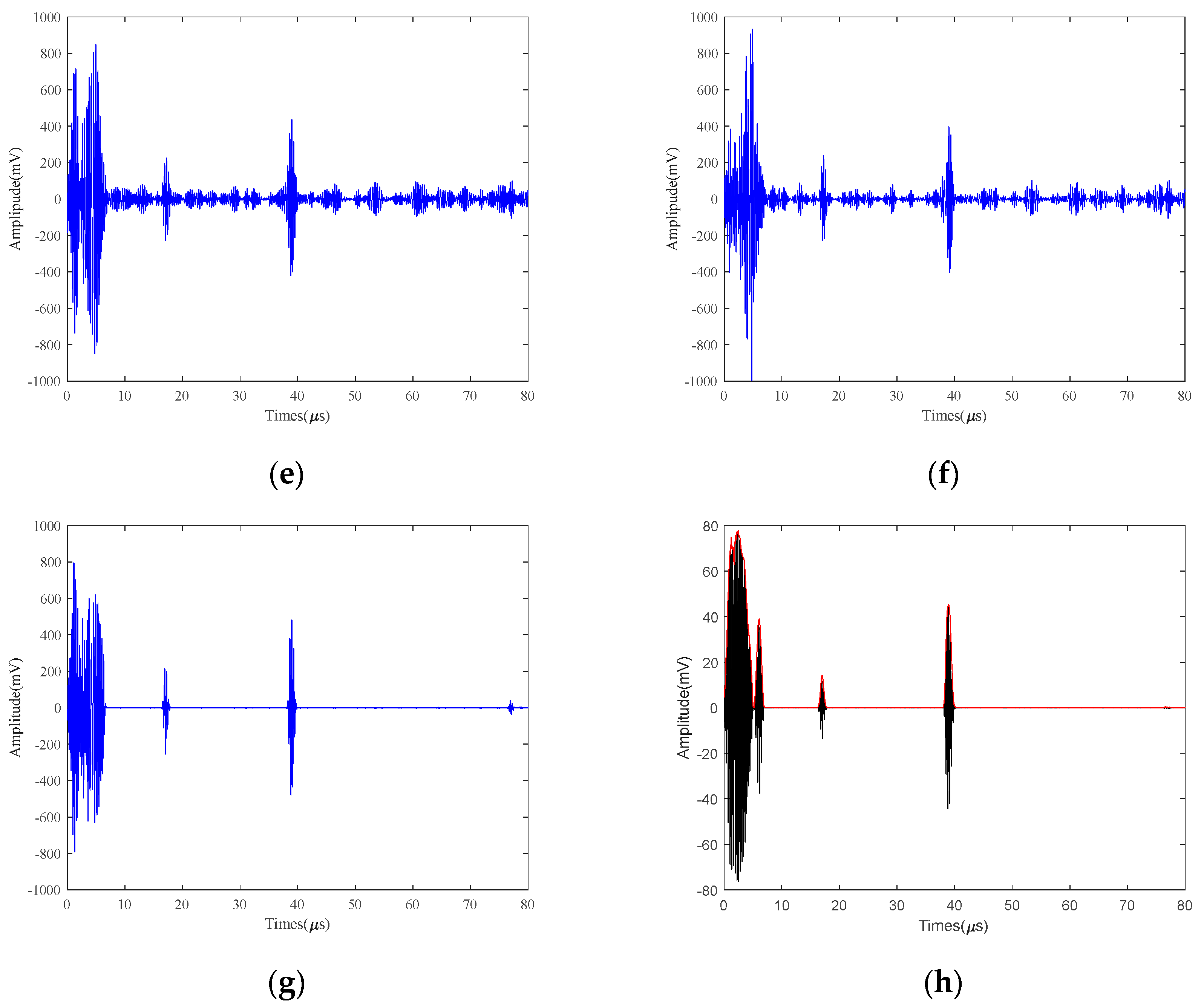
5.2. Comparative Effectiveness of Different Methods for Small Defects at Different Excitation Voltages
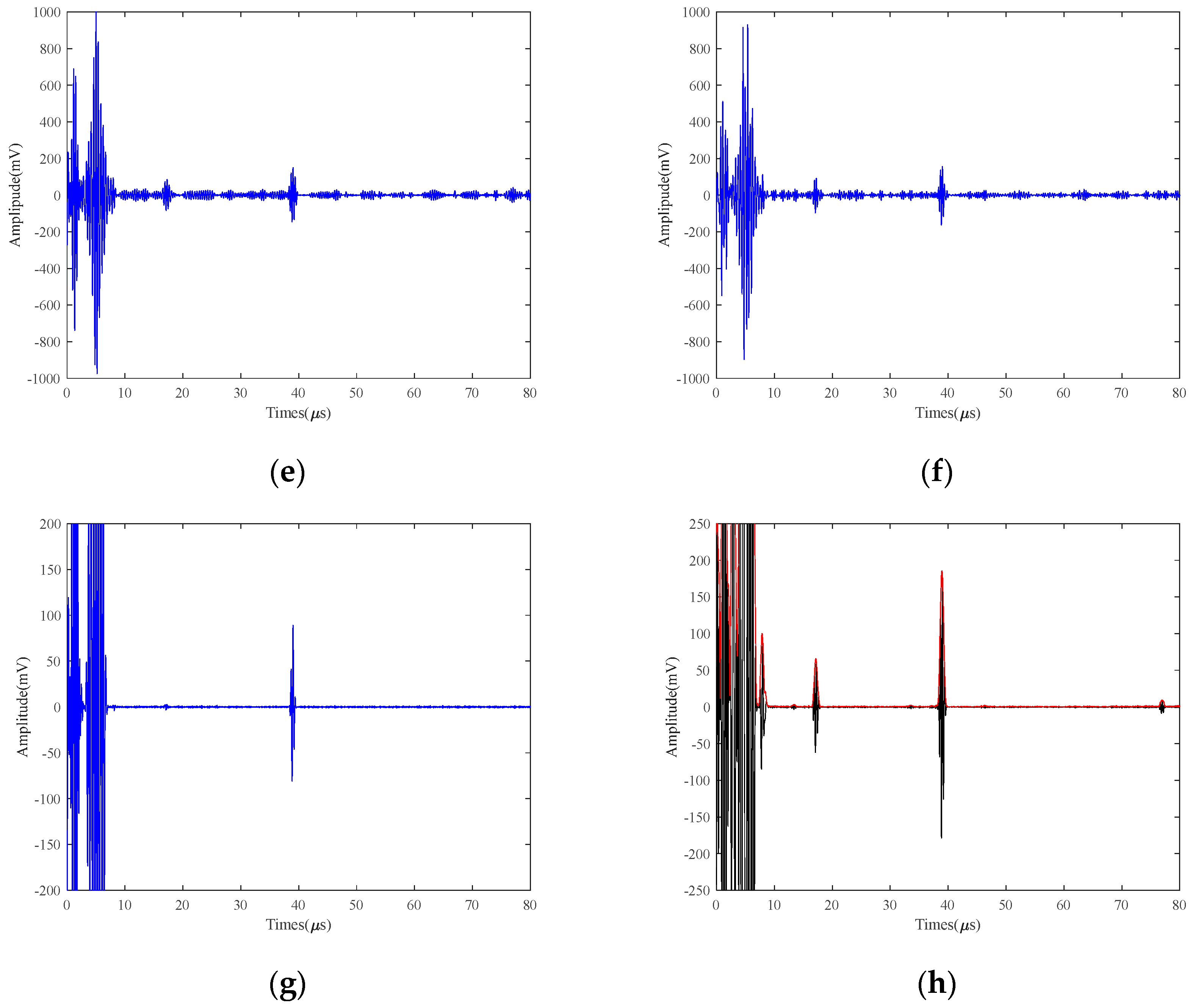
5.3. Study of the Effect of Different Temperature Detection on the SNR of Small Defects
6. Conclusions
- (1)
- The SVIC method combines the advantages of SVMD, the correlation coefficient, and ICEEMDAN. The HHO algorithm is used to solve the problem that SVMD makes it difficult to select the balance parameter. Combined with the CC threshold, the optimal IMF can be adaptively selected. The signal is further processed with ICEEMDAN, and finally, a linearly stable signal with a Hilbert envelope is obtained.
- (2)
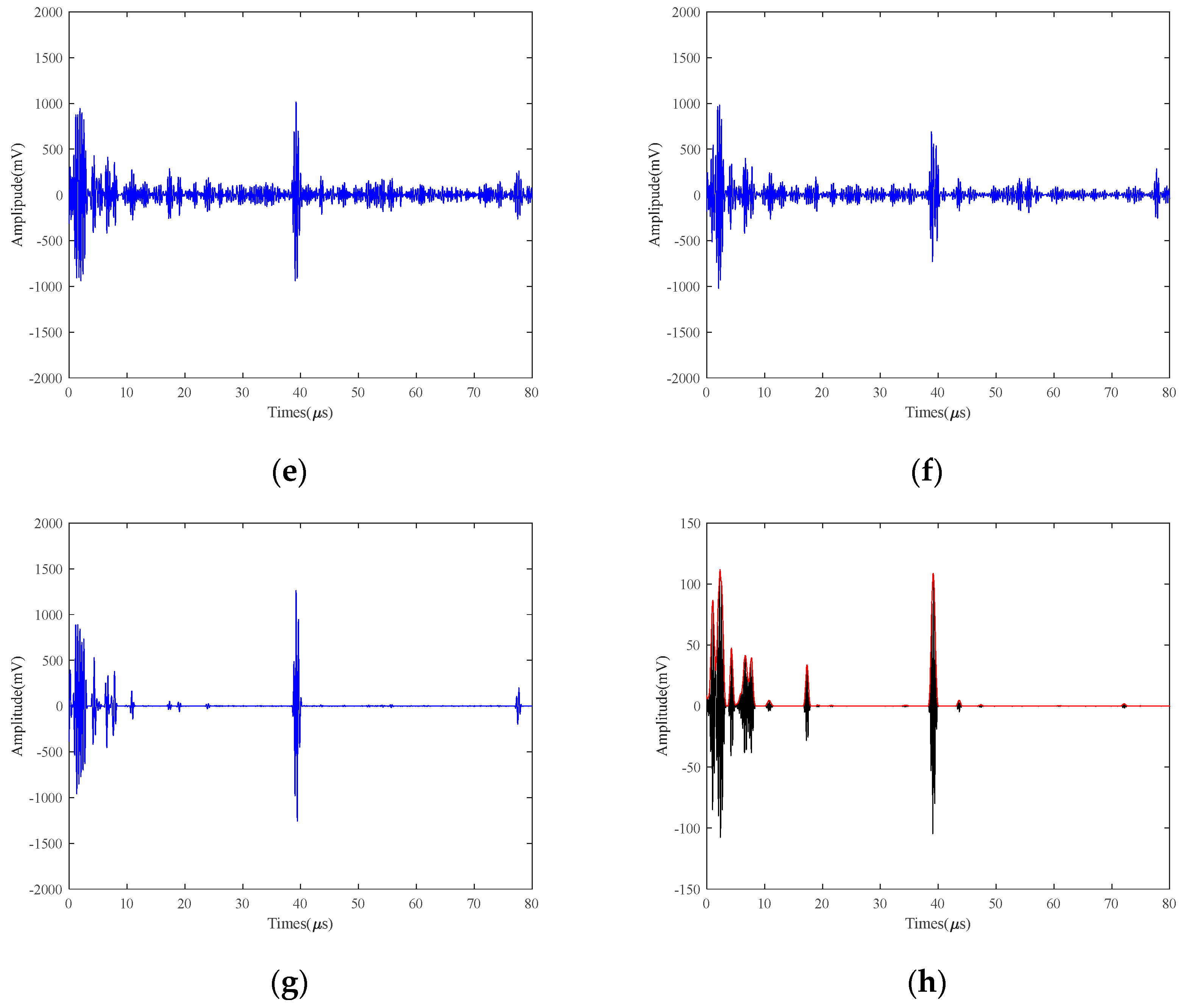
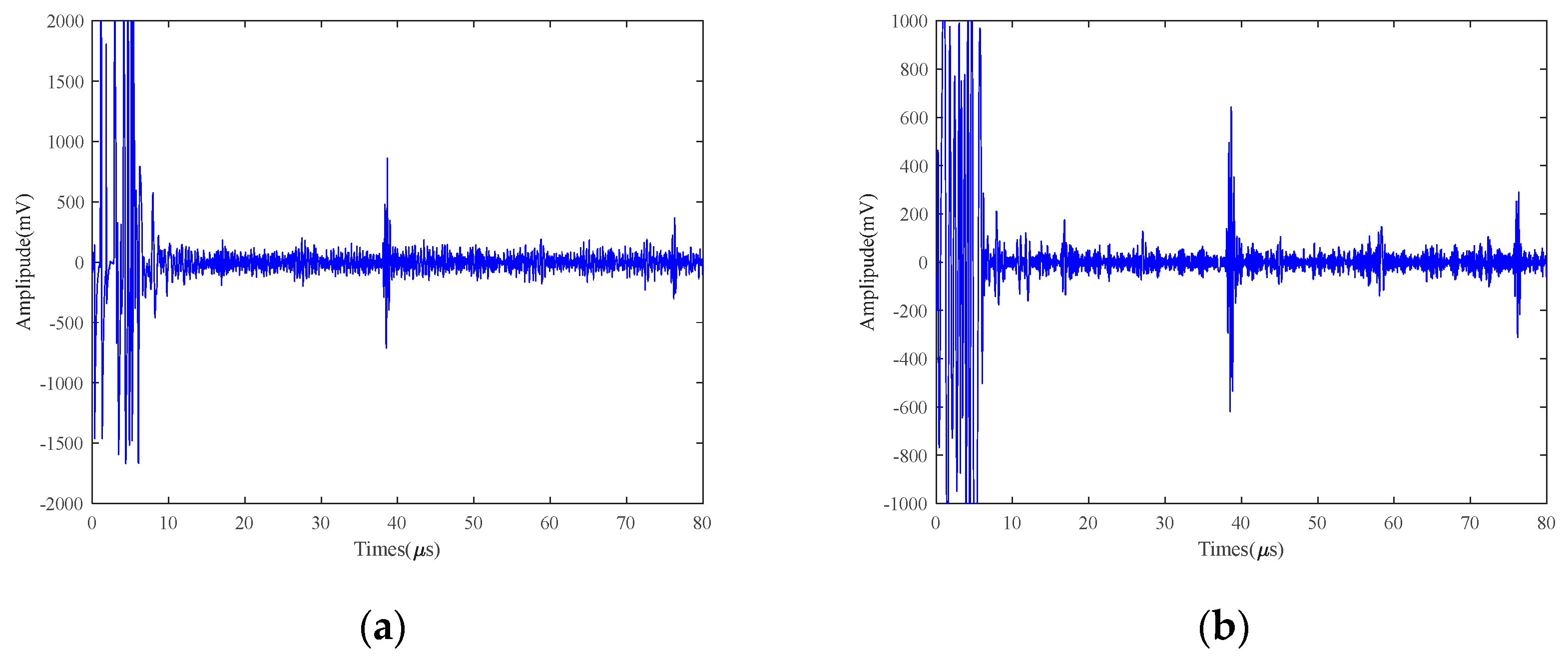
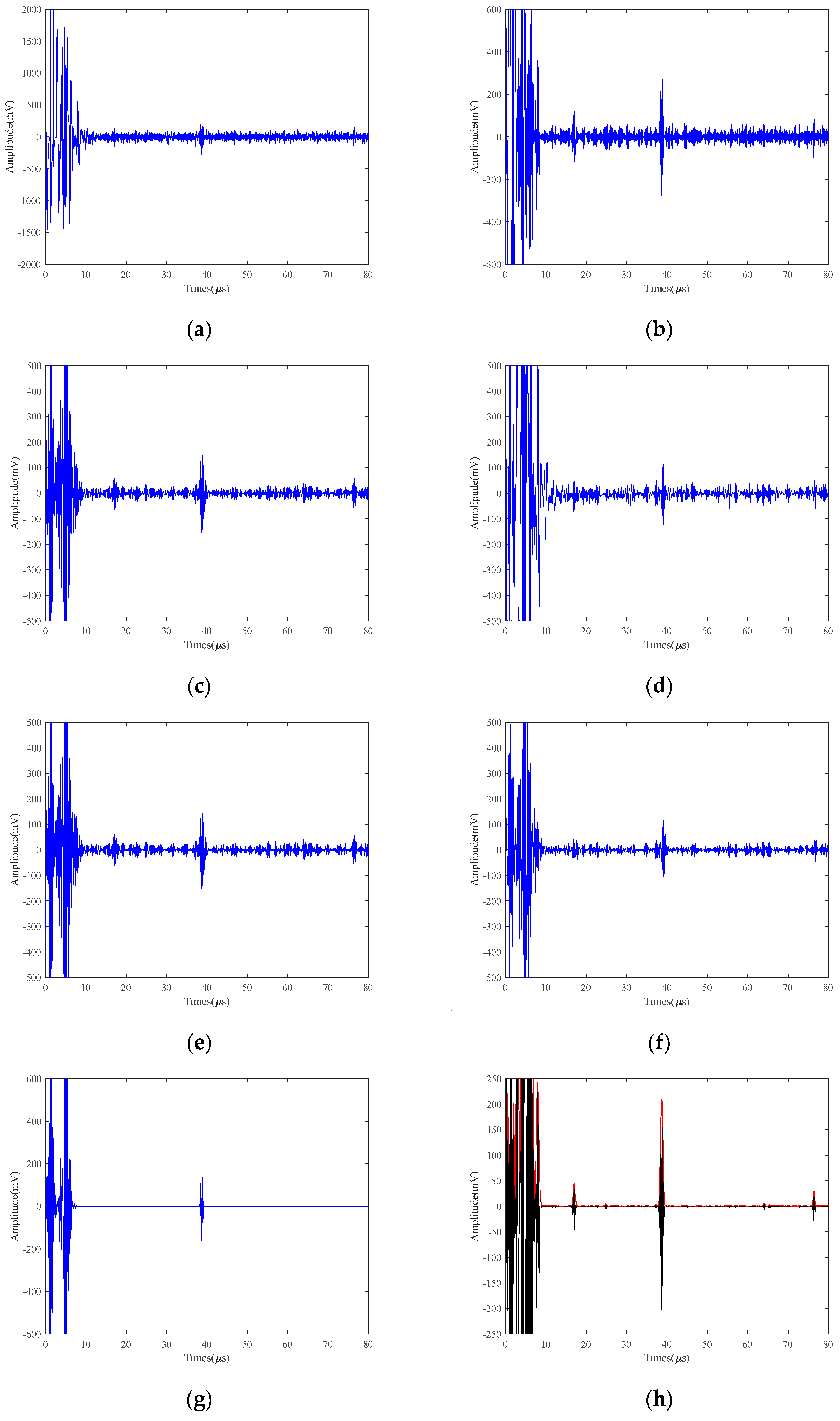
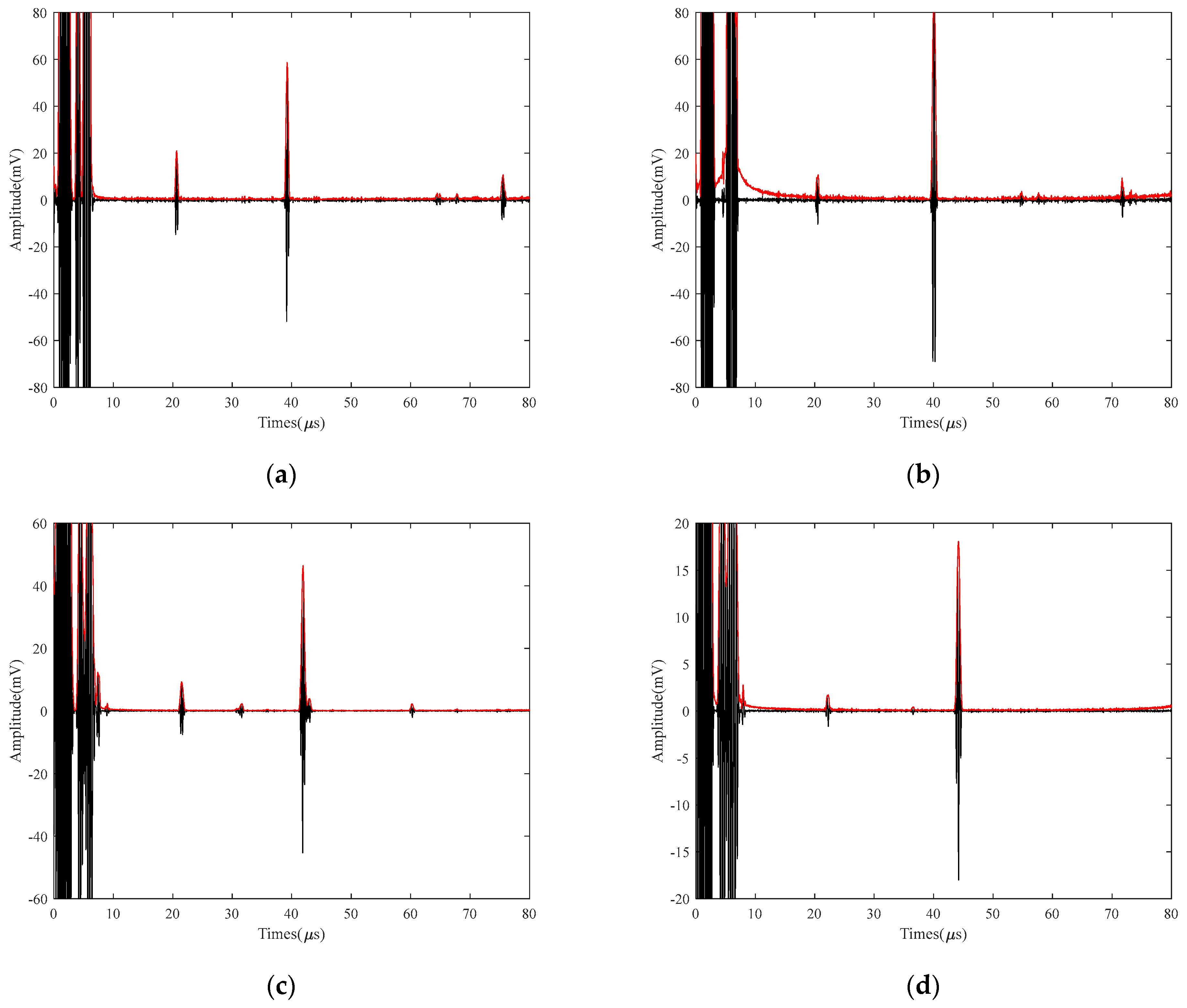
- Experimental analyses with different defect sizes verify that the SVIC method is able to detect and extract 2 mm defects at 700 °C and LEV while ensuring a stable increase in SNR compared to other methods. The method is able to obtain smoother envelopes and more accurate peak times, which is very useful for ultrasonic defect detection.
- (3)
- Experimental analyses at different temperatures verify that the SVIC method can effectively reduce the EMAT signal noise under LEV excitation and extract 2 mm defect signals. Compared to existing methods, SVIC performs well in detecting small defects under different temperatures and can significantly improve the SNR.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, W.; Gao, B.; Yun Tian, G.; Si, D. Physic perspective fusion of electromagnetic acoustic transducer and pulsed eddy current testing in non-destructive testing system. Philos. Trans. R. Soc. A 2020, 378, 0190608. [Google Scholar] [CrossRef]
- Thring, C.B.; Fan, Y.; Edwards, R.S. Focused Rayleigh wave EMAT for characterisation of surface-breaking defects. Ndt E Int. 2016, 81, 20–27. [Google Scholar] [CrossRef]
- Nguyen, T.-D.; Kojima, F. Identification of sub-surface defect parameters in plates using electromagnetic acoustic interaction. Int. J. Appl. Electromagn. Mech. 2010, 33, 1009–1015. [Google Scholar] [CrossRef]
- Dixon, S.; Edwards, C.; Palmer, S.B. High accuracy non-contact ultrasonic thickness gauging of aluminium sheet using electromagnetic acoustic transducers. Ultrasonics 2001, 39, 445–453. [Google Scholar] [CrossRef] [PubMed]
- Burrows, S.E.; Fan, Y.; Dixon, S. High temperature thickness measurements of stainless steel and low carbon steel using electromagnetic acoustic transducers. Ndt E Int. 2014, 68, 73–77. [Google Scholar] [CrossRef]
- Jung, J.; Lee, W.; Kang, W.; Shin, E.; Ryu, J.; Choi, H. Review of piezoelectric micromachined ultrasonic transducers and their applications. J. Micromechan. Microeng. 2017, 27, 113001. [Google Scholar] [CrossRef]
- Hirao, M.; Ogi, H. Electromagnetic Acoustic Transducers; Springer: Tokyo, Japan, 2017. [Google Scholar]
- Gautam, A.K.; Yin, C.-C.; Bhattacharya, B. A new chevron electromagnetic acoustic transducer design for generating shear horizontal guided wave. Ultrasonics 2023, 135, 107137. [Google Scholar] [CrossRef]
- Thring, C.B.; Fan, Y.; Edwards, R.S. Multi-coil focused EMAT for characterisation of surface-breaking defects of arbitrary orientation. Ndt E Int. 2017, 88, 1–7. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, S.; Zheng, Y.; Shen, X.; Zhang, J. Variational Wavelet Ensemble Empirical (VWEE) Denoising Method for Electromagnetic Ultrasonic Signal in High-Temperature Environment with Low-Voltage Excitation. Chin. J. Mech. Eng. 2022, 35, 111. [Google Scholar] [CrossRef]
- Abbate, A.; Koay, J.; Frankel, J.; Schroeder, S.C.; Das, P. Signal detection and noise suppression using a wavelet transform signal processor: Application to ultrasonic flaw detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 14–26. [Google Scholar] [CrossRef]
- Legendre, S.; Goyette, J.; Massicotte, D. Ultrasonic NDE of composite material structures using wavelet coefficients. Ndt E Int. 2001, 34, 31–37. [Google Scholar] [CrossRef]
- Legendre, S.; Massicotte, D.; Goyette, J.; Bose, T.K. Wavelet-transform-based method of analysis for Lamb-wave ultrasonic NDE signals. IEEE Trans. Instrum. Meas. 2000, 49, 524–530. [Google Scholar] [CrossRef]
- Kubinyi, M.; Kreibich, O.; Neuzil, J.; Smid, R. EMAT noise suppression using information fusion in stationary wavelet packets. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 1027–1036. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Si, D.; Zhong, G.; Gao, B.; Li, X.; Tian, G.; Qiu, F.; Mao, D.; Yin, Y. EMD of EMAT NDT in X70 pipeline weld defects. In Proceedings of the 2017 Far East NDT New Technology & Application Forum (FENDT), Xi’an, China, 22–24 June 2017; pp. 254–258. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Li, S.; Yang, Y.; Li, C.; He, H.; Zhang, Q.; Zhao, S. Research on Signal Processing Technology of Ultrasonic Non-Destructive Testing Based on EEMD Combined with Wavelet Packet. IEEJ Trans. Electr. Electron. Eng. 2023, 18, 686–700. [Google Scholar] [CrossRef]
- Yeh, J.-R.; Shieh, J.-S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Gu, J.; Peng, Y. An improved complementary ensemble empirical mode decomposition method and its application in rolling bearing fault diagnosis. Digit. Signal Process. 2021, 113, 103050. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Li, Y.; Li, Y.; Chen, X.; Yu, J.; Yang, H.; Wang, L. A new underwater acoustic signal denoising technique based on CEEMDAN, mutual information, permutation entropy, and wavelet threshold denoising. Entropy 2018, 20, 563. [Google Scholar] [CrossRef]
- Chen, W.; Li, J.; Wang, Q.; Han, K. Fault feature extraction and diagnosis of rolling bearings based on wavelet thresholding denoising with CEEMDAN energy entropy and PSO-LSSVM. Measurement 2021, 172, 108901. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, H.; Cheng, Y.; Tang, Y.; Liu, B.; Li, H.; Yang, F.; Zhang, W.; Huang, W.; Zheng, F. A Combined Noise Reduction Method for Floodgate Vibration Signals Based on Adaptive Singular Value Decomposition and Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise. Water 2023, 15, 4287. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Zhao, S.; Zhou, J.; Liu, Y.; Zhang, J.; Cui, J. Application of Adaptive Filtering Based on Variational Mode Decomposition for High-Temperature Electromagnetic Acoustic Transducer Denoising. Sensors 2022, 22, 7042. [Google Scholar] [CrossRef] [PubMed]
- Nazari, M.; Sakhaei, S.M. Successive variational mode decomposition. Signal Process. 2020, 174, 107610. [Google Scholar] [CrossRef]
- Ma, H.; Xu, Y.; Wang, J.; Song, M.; Zhang, S. SVMD coupled with dual-threshold criteria of correlation coefficient: A self-adaptive denoising method for ship-radiated noise signal. Ocean Eng. 2023, 281, 114931. [Google Scholar] [CrossRef]
- Shi, W.; Chen, W.; Lu, C.; Cheng, J.; Chen, Y. Application of chirp pulse compression technique to a high-temperature EMAT with a large lift-off. Int. J. Appl. Electromagn. Mech. 2021, 65, 181–196. [Google Scholar] [CrossRef]
- He, M.; Shi, W.; Lu, C.; Chen, G.; Qiu, F.; Zhu, Y.; Liu, Y. Application of Pulse Compression Technique in High-Temperature Carbon Steel Forgings Crack Detection with Angled SV-Wave EMATs. Sensors 2023, 23, 2685. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, S.; Zheng, Y.; Liu, Y.; Ge, Z. A new denoising method VSCE for high-temperature shear wave electromagnetic ultrasonic defect detection at a low excitation voltage. IEEE Sens. J. 2023, 24, 12594–12603. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMF | 1 | 2 | 3 | 4 | 5 | 6 |
| Center frequency (MHz) | 1 | 2.5 | 4 | 5.5 | 7 | 8.5 |
| Frequency distribution (MHz) | 0–2 | 1–4 | 3–5 | 4–7 | 6–8 | 7–10 |
| Denoising Method | Original Signal | EMD | VMD | WTD | VMD+EMD | VMD+WTD | VMCE | SVIC | |
|---|---|---|---|---|---|---|---|---|---|
| SNR/dB | |||||||||
| Bottom echo | 24.88 | 30.27 | 28.13 | 27.92 | 28.20 | 29.38 | 56.03 | 53.97 | |
| Defect echo | 19.36 | 25.53 | 22.43 | 22.39 | 22.69 | 23.42 | 53.65 | 54.99 | |
| Denoising Method | Original Signal | EMD | VMD | WTD | VMD+EMD | VMD+WTD | VMCE | SVIC | |
|---|---|---|---|---|---|---|---|---|---|
| SNR/dB | |||||||||
| Bottom echo | 17.92 | 26.98 | 24.26 | 26.32 | 25.38 | 26.71 | 47.72 | 53.51 | |
| Defect echo | 14.29 | 18.05 | 16.48 | 16.52 | 17.76 | 17.52 | 16.54 | 45.18 | |
| Denoising Method | Original Signal | EMD | VMD | WTD | VMD+EMD | VMD+WTD | VMCE | SVIC | |
|---|---|---|---|---|---|---|---|---|---|
| SNR/dB | |||||||||
| Bottom echo | 20.04 | 28.09 | 25.10 | 19.78 | 25.32 | 24.98 | 54.37 | 66.20 | |
| Defect echo | 13.96 | 19.34 | 20.34 | 13.76 | 19.64 | 23.02 | 34.04 | 54.78 | |
| Denoising Method | Original Signal | EMD | VMD | WTD | VMD+EMD | VMD+WTD | VMCE | SVIC | |
|---|---|---|---|---|---|---|---|---|---|
| SNR/dB | |||||||||
| Bottom echo | 24.62 | 29.74 | 25.60 | 27.80 | 25.38 | 27.35 | 51.71 | 53.48 | |
| Defect echo | 13.54 | 17.77 | 14.78 | 16.20 | 16.06 | 15.26 | 24.43 | 32.38 | |
| Denoising Method | Original Signal | EMD | VMD | WTD | VMD+EMD | VMD+WTD | VMCE | SVIC | |
|---|---|---|---|---|---|---|---|---|---|
| SNR/dB | |||||||||
| Bottom echo | 22.90 | 25.31 | 27.06 | 24.63 | 27.18 | 29.34 | 51.22 | 53.55 | |
| Defect echo | 14.95 | 20.23 | 18.74 | 17.67 | 19.90 | 18.42 | 17.55 | 37.41 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, Z.; Zhou, J.; Shen, X.; Zhang, X.; Qi, C. An Adaptive Noise Reduction Method for High Temperature and Low Voltage Electromagnetic Detection Signals Based on SVMD Combined with ICEEMDAN. Micromachines 2024, 15, 977. https://doi.org/10.3390/mi15080977
Ge Z, Zhou J, Shen X, Zhang X, Qi C. An Adaptive Noise Reduction Method for High Temperature and Low Voltage Electromagnetic Detection Signals Based on SVMD Combined with ICEEMDAN. Micromachines. 2024; 15(8):977. https://doi.org/10.3390/mi15080977
Chicago/Turabian StyleGe, Zhizeng, Jinjie Zhou, Xingquan Shen, Xingjun Zhang, and Caixia Qi. 2024. "An Adaptive Noise Reduction Method for High Temperature and Low Voltage Electromagnetic Detection Signals Based on SVMD Combined with ICEEMDAN" Micromachines 15, no. 8: 977. https://doi.org/10.3390/mi15080977