

MXene–MWCNT Conductive Network for Long-Lasting Wearable Strain Sensors with Gesture Recognition Capabilities

Abstract
:1. Introduction
2. Experiment
2.1. Material
2.2. Instruments
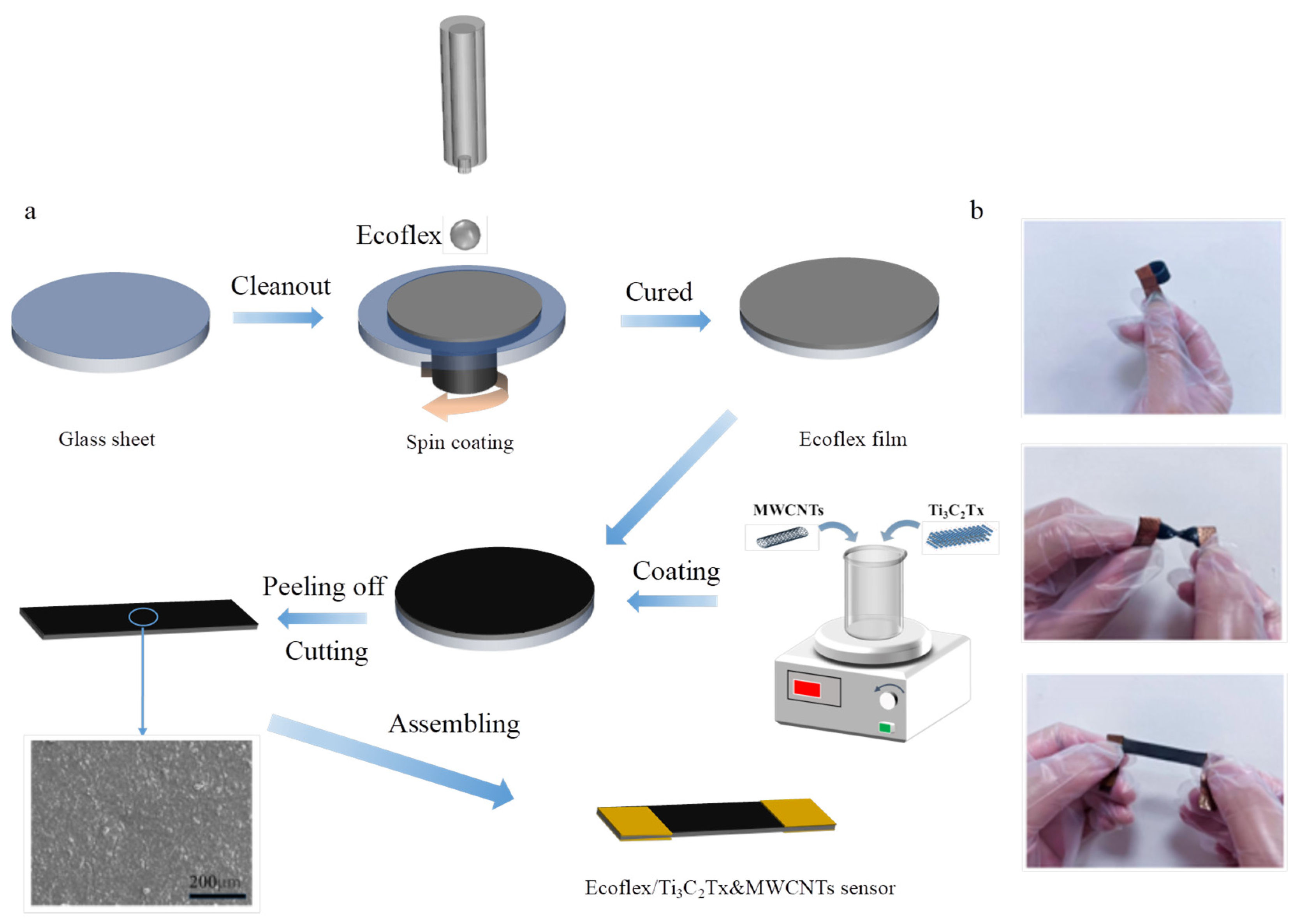
2.3. Preparation of Ecoflex
2.4. Fabrication of Ecoflex/Ti3C2Tx/MWCNT Sensors
2.5. Characterization
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, Y.; Wang, Y.; Dai, Y.; Wang, Q.; Xiang, P.; Li, Y.; Gao, G. Amylopectin based hydrogel strain sensor with good biocompatibility, high toughness and stable anti-swelling in multiple liquid media. Eur. Polym. J. 2022, 164, 110981. [Google Scholar] [CrossRef]
- Liu, L.; Xu, C.N.; Yoshida, A.; Tu, D.; Ueno, N.; Kainuma, S. Scalable elasticoluminescent strain sensor for precise dynamic stress imaging and onsite infrastructure diagnosis. Adv. Mater. Technol. 2019, 4, 1800336. [Google Scholar] [CrossRef]
- Abramson, A.; Chan, C.T.; Khan, Y.; Mermin-Bunnell, A.; Matsuhisa, N.; Fong, R.; Shad, R.; Hiesinger, W.; Mallick, P.; Gambhir, S.S. A flexible electronic strain sensor for the real-time monitoring of tumor regression. Sci. Adv. 2022, 8, eabn6550. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Qi, X.; Xu, L.; Lu, H.; Wang, W.; Jin, X.; Md, Z.I.; Zhu, Y.; Fu, Y.; Ni, Q. Self-repairing, large linear working range shape memory carbon nanotubes/ethylene vinyl acetate fiber strain sensor for human movement monitoring. ACS Appl. Mater. Interfaces 2020, 12, 42179–42192. [Google Scholar] [CrossRef]
- Liu, X.; Wei, Y.; Qiu, Y. Advanced flexible skin-like pressure and strain sensors for human health monitoring. Micromachines 2021, 12, 695. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Yu, H.; Ma, X.; Lv, X.; Liu, Y.; Wang, H.; Wang, Z.; Chen, D. A Highly Sensitive Strain Sensor with Self-Assembled MXene/Multi-Walled Carbon Nanotube Sliding Networks for Gesture Recognition. Micromachines 2024, 15, 1301. [Google Scholar] [CrossRef] [PubMed]
- Shen, Z.; Liu, F.; Huang, S.; Wang, H.; Yang, C.; Hang, T.; Tao, J.; Xia, W.; Xie, X. Progress of flexible strain sensors for physiological signal monitoring. Biosens. Bioelectron. 2022, 211, 114298. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Qin, L.; Yang, W.; He, Y.; Zhang, S.; Yang, Y.; Xu, K.; Gao, P.; Yu, J.; Cai, K. A conductive hydrogel based on gain and PVA/PAA/Fe3+ for strain sensor and physiological signal detection. ACS Appl. Polym. Mater. 2021, 3, 5268–5276. [Google Scholar] [CrossRef]
- Yin, F.; Li, X.; Peng, H.; Li, F.; Yang, K.; Yuan, W. A highly sensitive, multifunctional, and wearable mechanical sensor based on RGO/synergetic fiber bundles for monitoring human actions and physiological signals. Sens. Actuators B Chem. 2019, 285, 179–185. [Google Scholar] [CrossRef]
- Chen, M.; Hu, X.; Li, K.; Sun, J.; Liu, Z.; An, B.; Zhou, X.; Liu, Z. Self-assembly of dendritic-lamellar MXene/Carbon nanotube conductive films for wearable tactile sensors and artificial skin. Carbon 2020, 164, 111–120. [Google Scholar] [CrossRef]
- Wu, C.; Wang, H.; Li, Y.; Kim, T.; Kwon, S.J.; Park, B.; He, Z.; Lee, S.-B.; Um, M.-K.; Byun, J.-H. Sensitivity improvement of stretchable strain sensors by the internal and external structural designs for strain redistribution. ACS Appl. Mater. Interfaces 2020, 12, 50803–50811. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Liu, J.; Fan, D.; Cao, J.; Huang, X.; Zheng, Z.; Zhang, X. Scalable manufacturing of real-time self-healing strain sensors based on brominated natural rubber. Chem. Eng. J. 2020, 389, 124448. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, K.; Geng, Q.; Nie, M.; Wang, Q.; Huang, Z.; Wu, Z.; Pi, L. Helically intersected conductive network design for wearable electronic devices: From theory to application. ACS Appl. Mater. Interfaces 2021, 13, 11480–11488. [Google Scholar] [CrossRef]
- Yang, C.; Wu, Y.; Nie, M.; Wang, Q.; Liu, Y. Highly stretchable and conductive carbon fiber/polyurethane conductive films featuring interlocking interfaces. ACS Appl. Mater. Interfaces 2021, 13, 38656–38665. [Google Scholar] [CrossRef]
- Zhao, M.; Li, D.; Huang, J.; Wang, D.; Mensah, A.; Wei, Q. A multifunctional and highly stretchable electronic device based on silver nanowire/wrap yarn composite for a wearable strain sensor and heater. J. Mater. Chem. C 2019, 7, 13468–13476. [Google Scholar] [CrossRef]
- Wang, Y.; Qin, W.; Hu, X.; Liu, Z.; Ren, Z.; Cao, H.; An, B.; Zhou, X.; Shafiq, M.; Yin, S. Hierarchically buckled Ti3C2Tx MXene/carbon nanotubes strain sensor with improved linearity, sensitivity, and strain range for soft robotics and epidermal monitoring. Sens. Actuators B Chem. 2022, 368, 132228. [Google Scholar] [CrossRef]
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.-L.; Cao, C. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots. Nano Energy 2022, 96, 107137. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Lin, J.-C.; Liatsis, P.; Alexandridis, P. Flexible and stretchable electrically conductive polymer materials for physical sensing applications. Polym. Rev. 2023, 63, 67–126. [Google Scholar] [CrossRef]
- Tang, J.; Wu, Y.; Ma, S.; Yan, T.; Pan, Z. Strain-sensing composite nanofiber filament and regulation mechanism of shoulder peaks based on carbon nanomaterial dispersion. ACS Appl. Mater. Interfaces 2023, 15, 7392–7404. [Google Scholar] [CrossRef]
- Sun, J.; Zhao, Y.; Yang, Z.; Shen, J.; Cabrera, E.; Lertola, M.J.; Yang, W.; Zhang, D.; Benatar, A.; Castro, J.M. Highly stretchable and ultrathin nanopaper composites for epidermal strain sensors. Nanotechnology 2018, 29, 355304. [Google Scholar] [CrossRef]
- Cheng, H.-W.; Yan, S.; Shang, G.; Wang, S.; Zhong, C.-J. Strain sensors fabricated by surface assembly of nanoparticles. Biosens. Bioelectron. 2021, 186, 113268. [Google Scholar] [CrossRef] [PubMed]
- Choi, Y.K.; Park, T.; Lee, D.H.D.; Ahn, J.; Kim, Y.H.; Jeon, S.; Han, M.J.; Oh, S.J. Wearable anti-temperature interference strain sensor with metal nanoparticle thin film and hybrid ligand exchange. Nanoscale 2022, 14, 8628–8639. [Google Scholar] [CrossRef]
- Liu, X.; Liang, X.; Lin, Z.; Lei, Z.; Xiong, Y.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.-P. Highly sensitive and stretchable strain sensor based on a synergistic hybrid conductive network. ACS Appl. Mater. Interfaces 2020, 12, 42420–42429. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Jiang, W.; Li, X.; Gao, X. Highly stretchable and sensitive strain sensors based on modified PDMS and hybrid particles of AgNWs/graphene. Nanotechnology 2022, 34, 06LT01. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Xu, L.; Chen, Q.; Peng, Q.; Yang, M.; Zhao, W.; Lin, Z.; Xu, F.; Li, Y.; He, X. Highly conductive multifunctional rGO/CNT hybrid sponge for electromagnetic wave shielding and strain sensor. Adv. Mater. Technol. 2019, 4, 1900443. [Google Scholar] [CrossRef]
- You, X.; Yang, J.; Wang, M.; Hu, J.; Ding, Y.; Zhang, X.; Dong, S. Graphene-based fiber sensors with high stretchability and sensitivity by direct ink extrusion. 2D Mater. 2019, 7, 015025. [Google Scholar] [CrossRef]
- Luan, H.; Zhang, D.; Xu, Z.; Zhao, W.; Yang, C.; Chen, X. MXene-based composite double-network multifunctional hydrogels as highly sensitive strain sensors. J. Mater. Chem. C 2022, 10, 7604–7613. [Google Scholar] [CrossRef]
- Yang, Y.; Cao, Z.; He, P.; Shi, L.; Ding, G.; Wang, R.; Sun, J. Ti3C2Tx MXene-graphene composite films for wearable strain sensors featured with high sensitivity and large range of linear response. Nano Energy 2019, 66, 104134. [Google Scholar] [CrossRef]
- Wu, L.; Xu, C.; Fan, M.; Tang, P.; Zhang, R.; Yang, S.; Pan, L.; Bin, Y. Lotus root structure-inspired Ti3C2-MXene-Based flexible and wearable strain sensor with ultra-high sensitivity and wide sensing range. Compos. Part A Appl. Sci. Manuf. 2022, 152, 106702. [Google Scholar] [CrossRef]
- Pu, J.-H.; Zhao, X.; Zha, X.-J.; Bai, L.; Ke, K.; Bao, R.-Y.; Liu, Z.-Y.; Yang, M.-B.; Yang, W. Multilayer structured AgNW/WPU-MXene fiber strain sensors with ultrahigh sensitivity and a wide operating range for wearable monitoring and healthcare. J. Mater. Chem. A 2019, 7, 15913–15923. [Google Scholar] [CrossRef]
- Kedambaimoole, V.; Kumar, N.; Shirhatti, V.; Nuthalapati, S.; Sen, P.; Nayak, M.M.; Rajanna, K.; Kumar, S. Laser-induced direct patterning of free-standing Ti3C2–MXene films for skin conformal tattoo sensors. ACS Sens. 2020, 5, 2086–2095. [Google Scholar] [CrossRef]
- Nie, M.; Ren, X.; Wen, L.; Han, L.; Wang, J.; Su, S. Highly sensitive and large range strain sensor based on synergetic effects with double conductive layer structures. Sens. Actuators A Phys. 2021, 318, 112515. [Google Scholar] [CrossRef]
- Kong, Y.; Zhang, M.; Zhan, X.; Cao, R.; Chen, J. Retention correlated read disturb errors in 3-D charge trap NAND flash memory: Observations, analysis, and solutions. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 4042–4051. [Google Scholar] [CrossRef]
- Liu, L.; Wang, L.; Liu, X.; Yuan, W.; Yuan, M.; Xia, Q.; Hu, Q.; Zhou, A. High-performance wearable strain sensor based on MXene@ cotton fabric with network structure. Nanomaterials 2021, 11, 889. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kang, J.; Lee, I.; Jang, J.; Park, C.B.; Lee, W.; Bae, B.-S. An intrinsically stretchable multi-biochemical sensor for sweat analysis using photo-patternable ecoflex. npj Flex. Electron. 2023, 7, 33. [Google Scholar] [CrossRef]
- Zhao, G.; Wu, T.; Wang, R.; Li, Z.; Yang, Q.; Wang, L.; Zhou, H.; Jin, B.; Liu, H.; Fang, Y. Hydrogel-assisted microfluidic spinning of stretchable fibers via fluidic and interfacial self-adaptations. Sci. Adv. 2023, 9, eadj5407. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, R.; Li, D.; Zhang, L.; Ren, G.; Wang, L.; Liu, J.; Wang, D.; Tang, Z.; Lu, G. High-performance foam-shaped strain sensor based on carbon nanotubes and Ti3C2T x MXene for the monitoring of human activities. ACS Nano 2021, 15, 9690–9700. [Google Scholar] [CrossRef]
- Gao, Y.; Yu, G.; Shu, T.; Chen, Y.; Yang, W.; Liu, Y.; Long, J.; Xiong, W.; Xuan, F. 3D-printed coaxial fibers for integrated wearable sensor skin. Adv. Mater. Technol. 2019, 4, 1900504. [Google Scholar] [CrossRef]
- Su, Y.; Ma, K.; Mao, X.; Liu, M.; Zhang, X. Highly compressible and sensitive flexible piezoresistive pressure sensor based on MWCNTs/Ti3C2Tx MXene@ melamine foam for human gesture monitoring and recognition. Nanomaterials 2022, 12, 2225. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Zhang, J.; An, L.; Yang, Y.; Wu, Y.; Liu, R.; Jin, Y.; Liu, Q.; Shi, Q.; Liang, Y. Synergetic effect of MXene/MoS2 heterostructure and gradient multilayer for highly sensitive flexible piezoelectric sensor. Polymer 2023, 286, 126399. [Google Scholar] [CrossRef]
- Guo, W.-Y.; Mai, T.; Huang, L.-Z.; Zhang, W.; Qi, M.-Y.; Yao, C.; Ma, M.-G. Multifunctional MXene conductive zwitterionic hydrogel for flexible wearable sensors and arrays. ACS Appl. Mater. Interfaces 2023, 15, 24933–24947. [Google Scholar] [CrossRef]
- Han, Z.; Niu, Y.; Shi, X.; Pan, D.; Liu, H.; Qiu, H.; Chen, W.; Xu, B.B.; El-Bahy, Z.M.; Hou, H. MXene@ c-MWCNT Adhesive Silica Nanofiber Membranes Enhancing Electromagnetic Interference Shielding and Thermal Insulation Performance in Extreme Environments. Nano-Micro Lett. 2024, 16, 195. [Google Scholar] [CrossRef] [PubMed]
- Dong, M.; Tomes, O.; Soul, A.; Hu, Y.; Bilotti, E.; Zhang, H.; Papageorgiou, D.G. Hybrid Ti3C2T x MXene and Carbon Nanotube Reinforced Epoxy Nanocomposites for Self-Sensing and Structural Health Monitoring. ACS Appl. Nano Mater. 2024, 7, 3314–3325. [Google Scholar] [CrossRef]
- Wu, H.; Liu, Q.; Du, W.; Li, C.; Shi, G. Transparent polymeric strain sensors for monitoring vital signs and beyond. ACS Appl. Mater. Interfaces 2018, 10, 3895–3901. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, F.; Yazigi, S.; Zhang, D.; Gui, X.; Qi, Y.; Zhong, J.; Sun, L. Nanoengineered highly sensitive and stable soft strain sensor built from cracked carbon nanotube network/composite bilayers. Carbon 2021, 173, 849–856. [Google Scholar] [CrossRef]
- Yang, K.; Yin, F.; Xia, D.; Peng, H.; Yang, J.; Yuan, W. A highly flexible and multifunctional strain sensor based on a network-structured MXene/polyurethane mat with ultra-high sensitivity and a broad sensing range. Nanoscale 2019, 11, 9949–9957. [Google Scholar] [CrossRef]
- Li, Z.-Y.; Zhai, W.; Yu, Y.-F.; Li, G.-J.; Zhan, P.-F.; Xu, J.-W.; Zheng, G.-Q.; Dai, K.; Liu, C.-T.; Shen, C.-Y. An ultrasensitive, durable and stretchable strain sensor with crack-wrinkle structure for human motion monitoring. Chin. J. Polym. Sci. 2021, 39, 316–326. [Google Scholar] [CrossRef]
- Kong, W.-W.; Zhou, C.-G.; Dai, K.; Jia, L.-C.; Yan, D.-X.; Li, Z.-M. Highly stretchable and durable fibrous strain sensor with growth ring-like spiral structure for wearable electronics. Compos. Part B Eng. 2021, 225, 109275. [Google Scholar] [CrossRef]
- Bu, Y.; Shen, T.; Yang, W.; Yang, S.; Zhao, Y.; Liu, H.; Zheng, Y.; Liu, C.; Shen, C. Ultrasensitive strain sensor based on superhydrophobic microcracked conductive Ti3C2Tx MXene/paper for human-motion monitoring and E-skin. Sci. Bull. 2021, 66, 1849–1857. [Google Scholar] [CrossRef]
- Fu, X.; Li, L.; Chen, S.; Xu, H.; Li, J.; Shulga, V.; Han, W. Knitted Ti3C2Tx MXene based fiber strain sensor for human–computer interaction. J. Colloid Interface Sci. 2021, 604, 643–649. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Wu, Y.; Tang, J.; Pan, Z. Highly sensitive strain sensor with wide strain range fabricated using carbonized natural wrapping yarns. Mater. Res. Bull. 2021, 143, 111452. [Google Scholar] [CrossRef]
- He, Y.; Wu, D.; Zhou, M.; Zheng, Y.; Wang, T.; Lu, C.; Zhang, L.; Liu, H.; Liu, C. Wearable strain sensors based on a porous polydimethylsiloxane hybrid with carbon nanotubes and graphene. ACS Appl. Mater. Interfaces 2021, 13, 15572–15583. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Li, X.; Jin, C.; He, Z.; Zhang, Q. High-performance epidermal strain sensor based on macro-defect graphene foams. Sens. Actuators A Phys. 2020, 303, 111721. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Lai, X.; Gao, T.; Zeng, X. Three-dimensional binary-conductive-network silver nanowires@ thiolated graphene foam-based room-temperature self-healable strain sensor for human motion detection. ACS Appl. Mater. Interfaces 2020, 12, 44360–44370. [Google Scholar] [CrossRef] [PubMed]
- Tian, B.; Yao, W.; Zeng, P.; Li, X.; Wang, H.; Liu, L.; Feng, Y.; Luo, C.; Wu, W. All-printed, low-cost, tunable sensing range strain sensors based on Ag nanodendrite conductive inks for wearable electronics. J. Mater. Chem. C 2019, 7, 809–818. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, Y.; Jin, L.; Chen, K.; Zhai, H.; Huang, Q.; Chen, Z.; Yi, Y.; Umar, M.; Xu, L. Highly breathable and stretchable strain sensors with insensitive response to pressure and bending. Adv. Funct. Mater. 2021, 31, 2007622. [Google Scholar] [CrossRef]
- Li, Y.; Yang, L.; He, Z.; Liu, Y.; Wang, H.; Zhang, W.; Teng, L.; Chen, D.; Song, G. Low-Cost Data Glove based on deep-learning-enhanced flexible multiwalled carbon nanotube sensors for real-time gesture recognition. Adv. Intell. Syst. 2022, 4, 2200128. [Google Scholar] [CrossRef]
- Zhai, W.; Zhu, J.; Wang, Z.; Zhao, Y.; Zhan, P.; Wang, S.; Zheng, G.; Shao, C.; Dai, K.; Liu, C. Stretchable, sensitive strain sensors with a wide workable range and low detection limit for wearable electronic skins. ACS Appl. Mater. Interfaces 2022, 14, 4562–4570. [Google Scholar] [CrossRef] [PubMed]
- Chhetry, A.; Sharifuzzaman, M.; Yoon, H.; Sharma, S.; Xuan, X.; Park, J.Y. MoS2-decorated laser-induced graphene for a highly sensitive, hysteresis-free, and reliable piezoresistive strain sensor. ACS Appl. Mater. Interfaces 2019, 11, 22531–22542. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Huang, J.; Liu, J.; Gu, J.; Zhu, J.; Huang, B.; Bai, J.; Guo, J.; Yang, X.; Guan, L. High toughness multifunctional organic hydrogels for flexible strain and temperature sensor. J. Mater. Chem. A 2021, 9, 23243–23255. [Google Scholar] [CrossRef]
- Sun, H.; Bu, Y.; Liu, H.; Wang, J.; Yang, W.; Li, Q.; Guo, Z.; Liu, C.; Shen, C. Superhydrophobic conductive rubber band with synergistic dual conductive layer for wide-range sensitive strain sensor. Sci. Bull. 2022, 67, 1669–1678. [Google Scholar] [CrossRef] [PubMed]
- Cheng, R.; Zeng, J.; Wang, B.; Li, J.; Cheng, Z.; Xu, J.; Gao, W.; Chen, K. Ultralight, flexible and conductive silver nanowire/nanofibrillated cellulose aerogel for multifunctional strain sensor. Chem. Eng. J. 2021, 424, 130565. [Google Scholar] [CrossRef]
- Huang, K.; Wu, Y.; Liu, J.; Chang, G.; Pan, X.; Weng, X.; Wang, Y.; Lei, M. A double-layer carbon nanotubes/polyvinyl alcohol hydrogel with high stretchability and compressibility for human motion detection. Eng. Sci. 2022, 17, 319–327. [Google Scholar]
- Ou, K.; Wang, M.; Meng, C.; Guo, K.; Emon, N.S.; Li, J.; Qi, K.; Dai, Y.; Wang, B. Enhanced mechanical strength and stretchable ionic conductive hydrogel with double-network structure for wearable strain sensing and energy harvesting. Compos. Sci. Technol. 2024, 255, 110732. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Zhu, G.; Wang, C.; Cui, X.; Xi, M.; Chang, X.; Zhu, Y. Breathable strain/temperature sensor based on fibrous networks of ionogels capable of monitoring human motion, respiration, and proximity. ACS Appl. Mater. Interfaces 2021, 13, 51567–51577. [Google Scholar] [CrossRef]
- Wang, S.; Xiao, P.; Liang, Y.; Zhang, J.; Huang, Y.; Wu, S.; Kuo, S.-W.; Chen, T. Network cracks-based wearable strain sensors for subtle and large strain detection of human motions. J. Mater. Chem. C 2018, 6, 5140–5147. [Google Scholar] [CrossRef]
- Hu, M.; He, P.; Zhao, W.; Zeng, X.; He, J.; Chen, Y.; Xu, X.; Sun, J.; Li, Z.; Yang, J. Machine learning-enabled intelligent gesture recognition and communication system using printed strain sensors. ACS Appl. Mater. Interfaces 2023, 15, 51360–51369. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Wu, S.; Li, S.; Zhong, X.; Zhang, X.; Qiao, H.; Kang, M.; Chen, J.; Wang, P.; Tao, L.-Q. Gesture recognition system using reduced graphene oxide-enhanced hydrogel strain sensors for rehabilitation training. ACS Appl. Mater. Interfaces 2023, 15, 45106–45115. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Zhang, W.; Zhang, J.; Zhang, Y.; Yin, X.; He, B. Flexible and self-adhesive strain sensor based on GNSs/MWCNTs coated stretchable fabric for gesture monitoring and recognition. Sens. Actuators A Phys. 2023, 349, 114004. [Google Scholar] [CrossRef]
- Tao, L.-Q.; Liu, Y.; Zou, S.; Zhang, Z.; Zhao, X. Enhancing Gesture Recognition in Low-Light Conditions Using Laser-Induced Graphene Flexible Strain Sensors. IEEE Sens. J. 2023, 24, 5256–5265. [Google Scholar] [CrossRef]
- Sun, Y.; Huang, J.; Cheng, Y.; Zhang, J.; Shi, Y.; Pan, L. High-accuracy dynamic gesture recognition: A universal and self-adaptive deep-learning-assisted system leveraging high-performance ionogels-based strain sensors. SmartMat 2024, 5, e1269. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, J.; Pang, K.; Liu, W.; Meng, J.; Li, B. A physiology-based flexible strap sensor for gesture recognition by sensing tendon deformation. IEEE Sens. J. 2021, 21, 9449–9456. [Google Scholar] [CrossRef]
- Gao, L.; Yang, J.; Zhao, Y.; Zhao, X.; Zhou, K.; Zhai, W.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Multilayer Bionic Tunable Strain Sensor with Mutually Non-Interfering Conductive Networks for Machine Learning-Assisted Gesture Recognition. Adv. Funct. Mater. 2024, 2416911. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Response Time | Detection Limit | Durability | Ref. |
|---|---|---|---|---|
| CB/PANIP/TPU | 0.03% | 10,000 | [59] | |
| MDS-LIG/PDMS | 250 ms | 12,000 | [60] | |
| PVA/DMSO/rGO/GO | 250 ms | 4000 | [61] | |
| CNTs/rGO/PDA/HF-SIO2 | 200 ms | 0.1% | 1000 | [62] |
| AgNWs/NFC | 180 ms | 0.5% | 10,000 | [63] |
| CNTs/PVA | 508 ms | 1000 | [64] | |
| PAM/CA/EtOH30 | 340 ms | 200 | [65] | |
| IL/TPU | 0.1% | 1000 | [66] | |
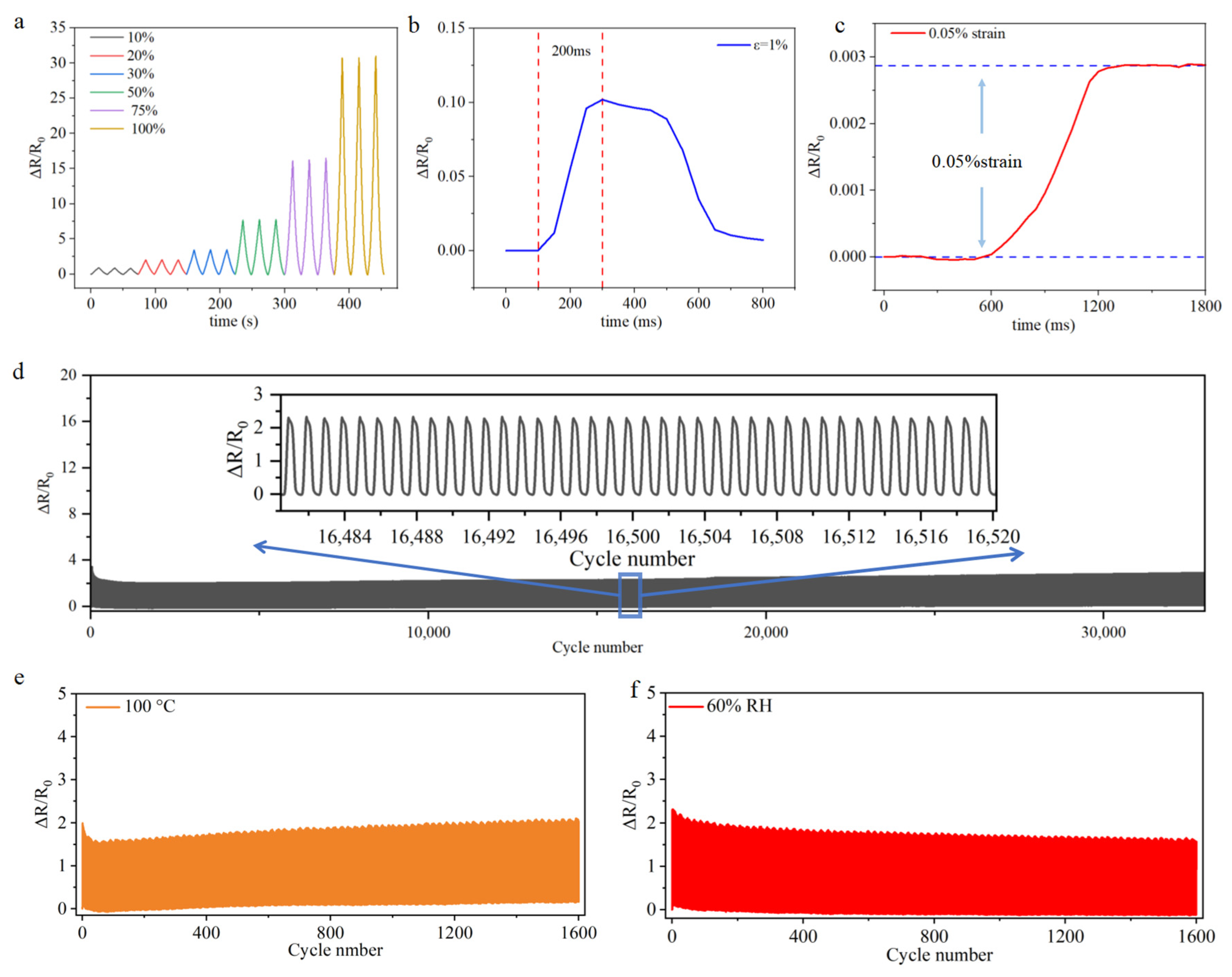
| Ecoflex/Ti3C2Tx /MWCNTs | 200 ms | 0.05% | 33,000 | This work |
| Composition | Number of Gestures | Method | Recognition Rate | Ref. |
|---|---|---|---|---|
| CNT/graphene/PDMS | 10 | SVM | 91.6% | [68] |
| PAM/SA/TG | 9 | 1D CNN | 83.3% | [69] |
| GNSs/MWCNTs | 5 | LSTM | 95% | [70] |
| Graphene | 10 | MobileNet CNN | 90% | [71] |
| Ionogels | 10 | DCNN | 93.66% | [72] |
| Graphene/PET | 12 | SVM | 84.7% | [73] |
| CNTs/graphene/TPU | 6 | KNN | 95.7% | [74] |
| Ecoflex/Ti3C2Tx /MWCNT | 10 | SVM | 93.66% | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Yu, H.; Lv, X.; Ma, X.; Qu, Q.; Wang, H.; Chen, D.; Liu, Y. MXene–MWCNT Conductive Network for Long-Lasting Wearable Strain Sensors with Gesture Recognition Capabilities. Micromachines 2025, 16, 123. https://doi.org/10.3390/mi16020123
Wang F, Yu H, Lv X, Ma X, Qu Q, Wang H, Chen D, Liu Y. MXene–MWCNT Conductive Network for Long-Lasting Wearable Strain Sensors with Gesture Recognition Capabilities. Micromachines. 2025; 16(2):123. https://doi.org/10.3390/mi16020123
Chicago/Turabian StyleWang, Fei, Hongchen Yu, Xue Lv, Xingyu Ma, Quanlin Qu, Hanning Wang, Da Chen, and Yijian Liu. 2025. "MXene–MWCNT Conductive Network for Long-Lasting Wearable Strain Sensors with Gesture Recognition Capabilities" Micromachines 16, no. 2: 123. https://doi.org/10.3390/mi16020123
APA StyleWang, F., Yu, H., Lv, X., Ma, X., Qu, Q., Wang, H., Chen, D., & Liu, Y. (2025). MXene–MWCNT Conductive Network for Long-Lasting Wearable Strain Sensors with Gesture Recognition Capabilities. Micromachines, 16(2), 123. https://doi.org/10.3390/mi16020123