

Misalignment in Mechanical Interlocking Heterogeneous Integration: Emergent Behavior and Geometry Optimization


Abstract
:1. Introduction
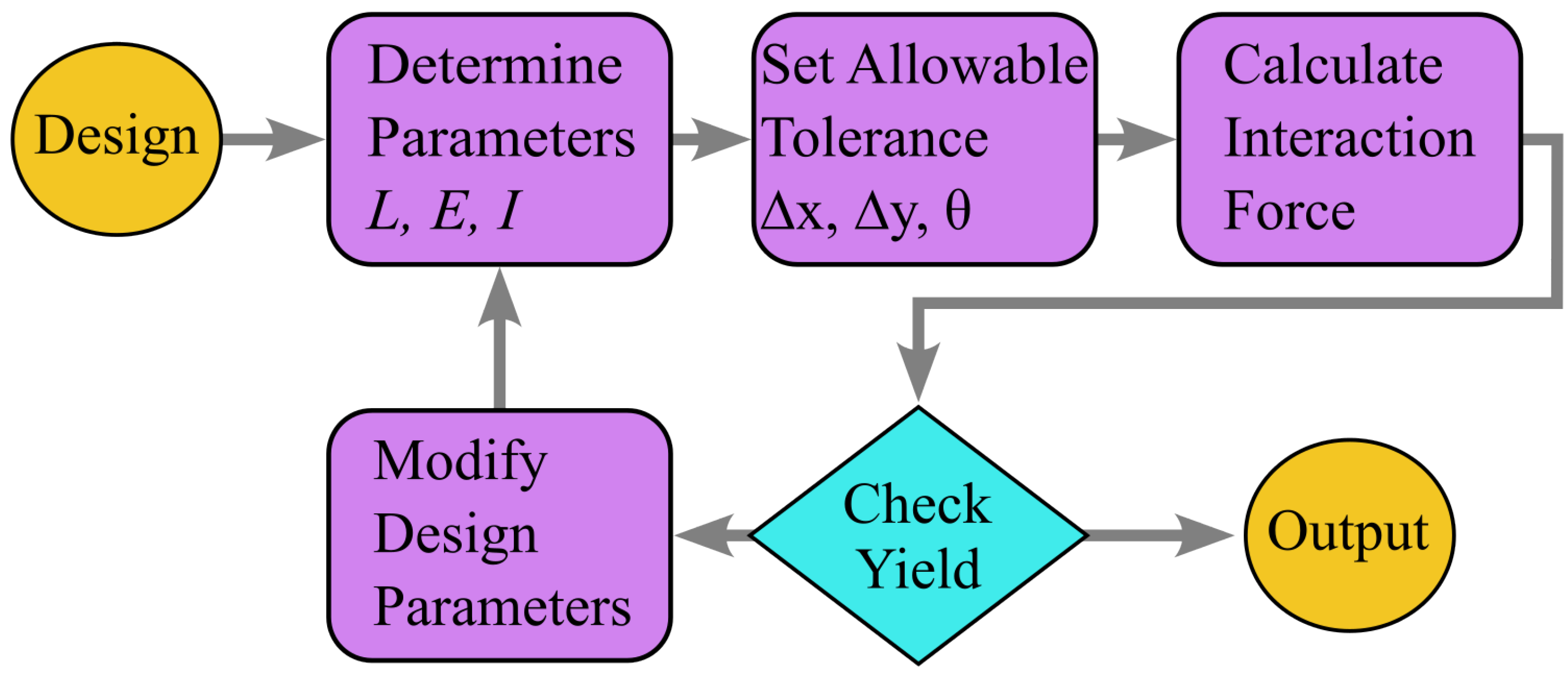
2. Analytical Model
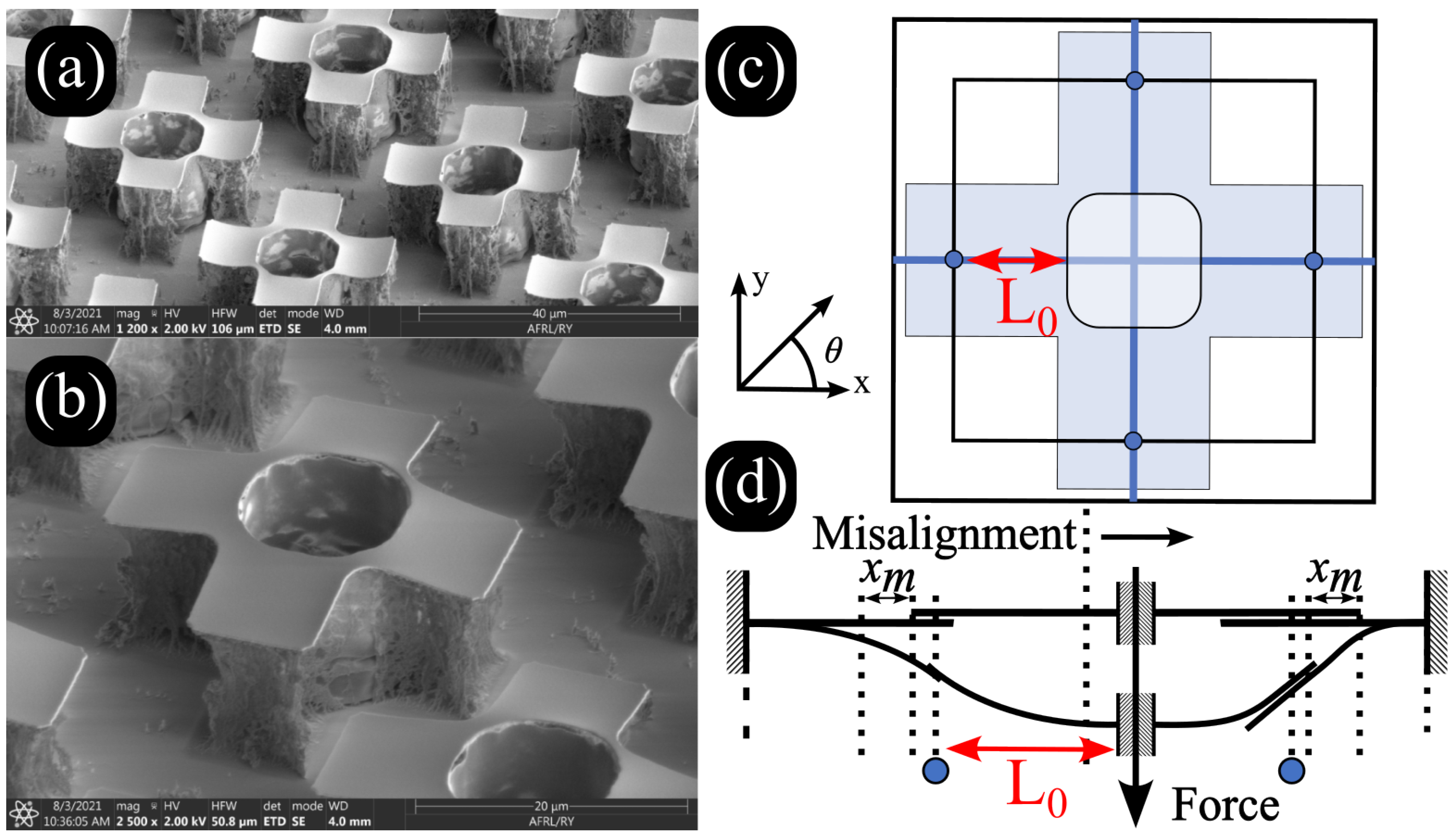
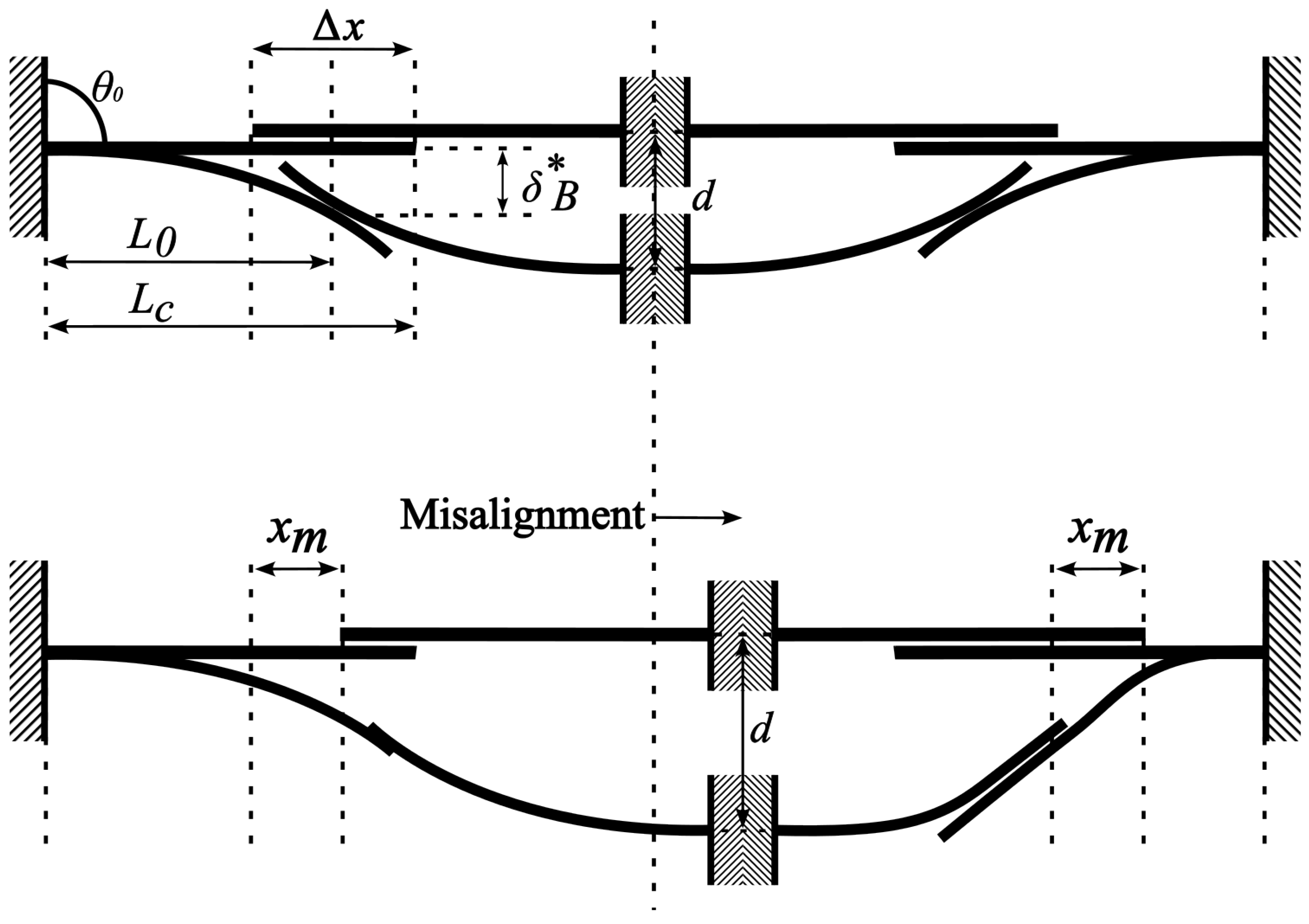
2.1. Effective Cantilever Length
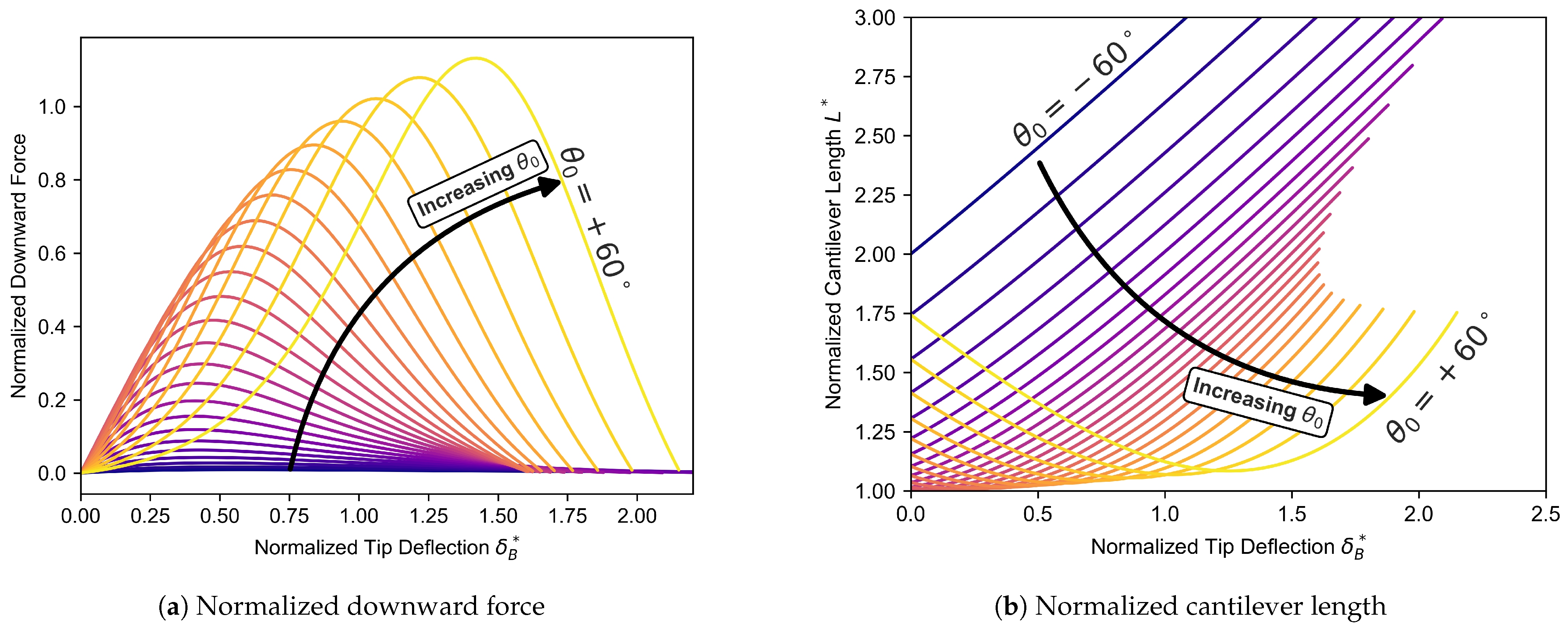
2.2. Nonlinear Mechanical Behavior
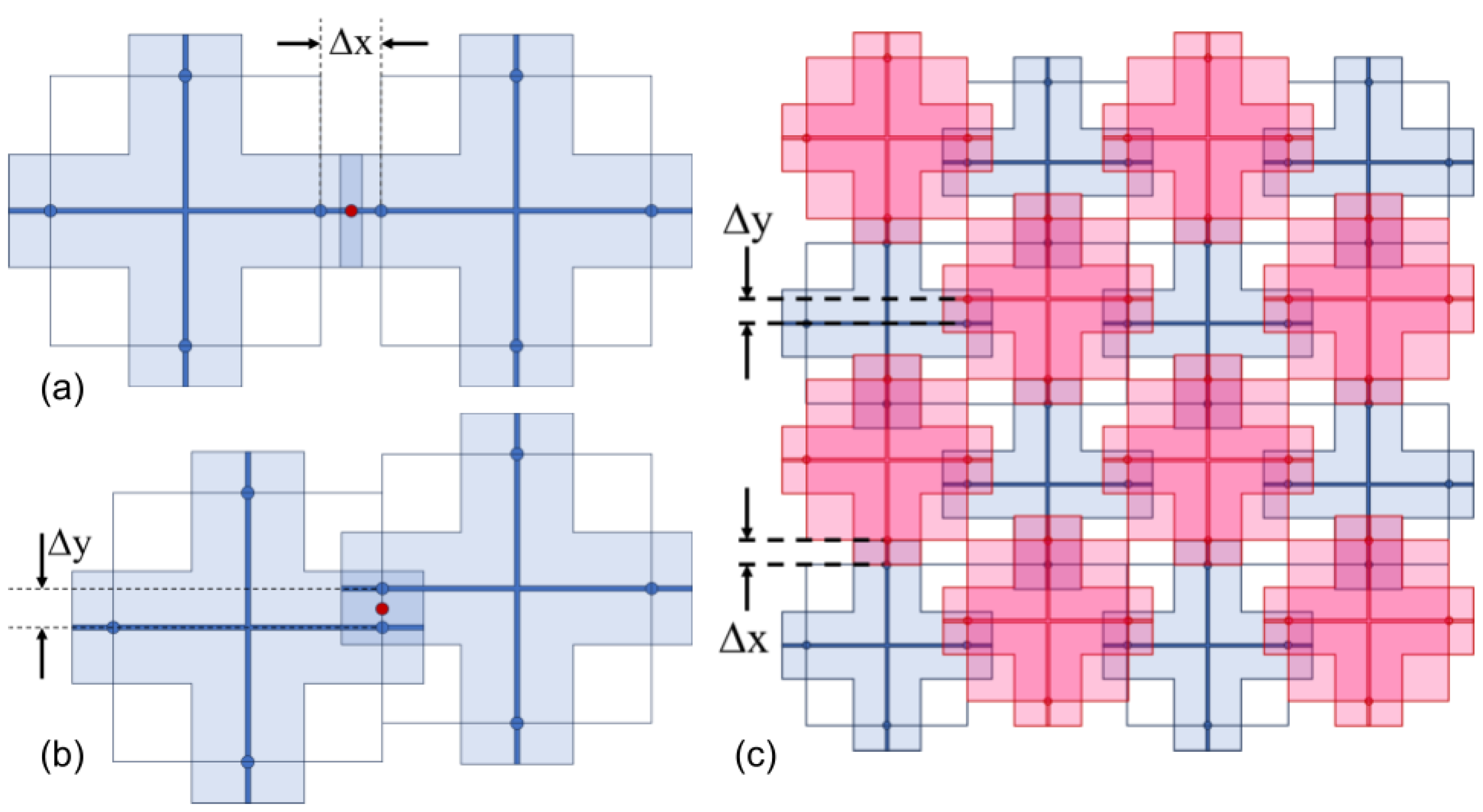
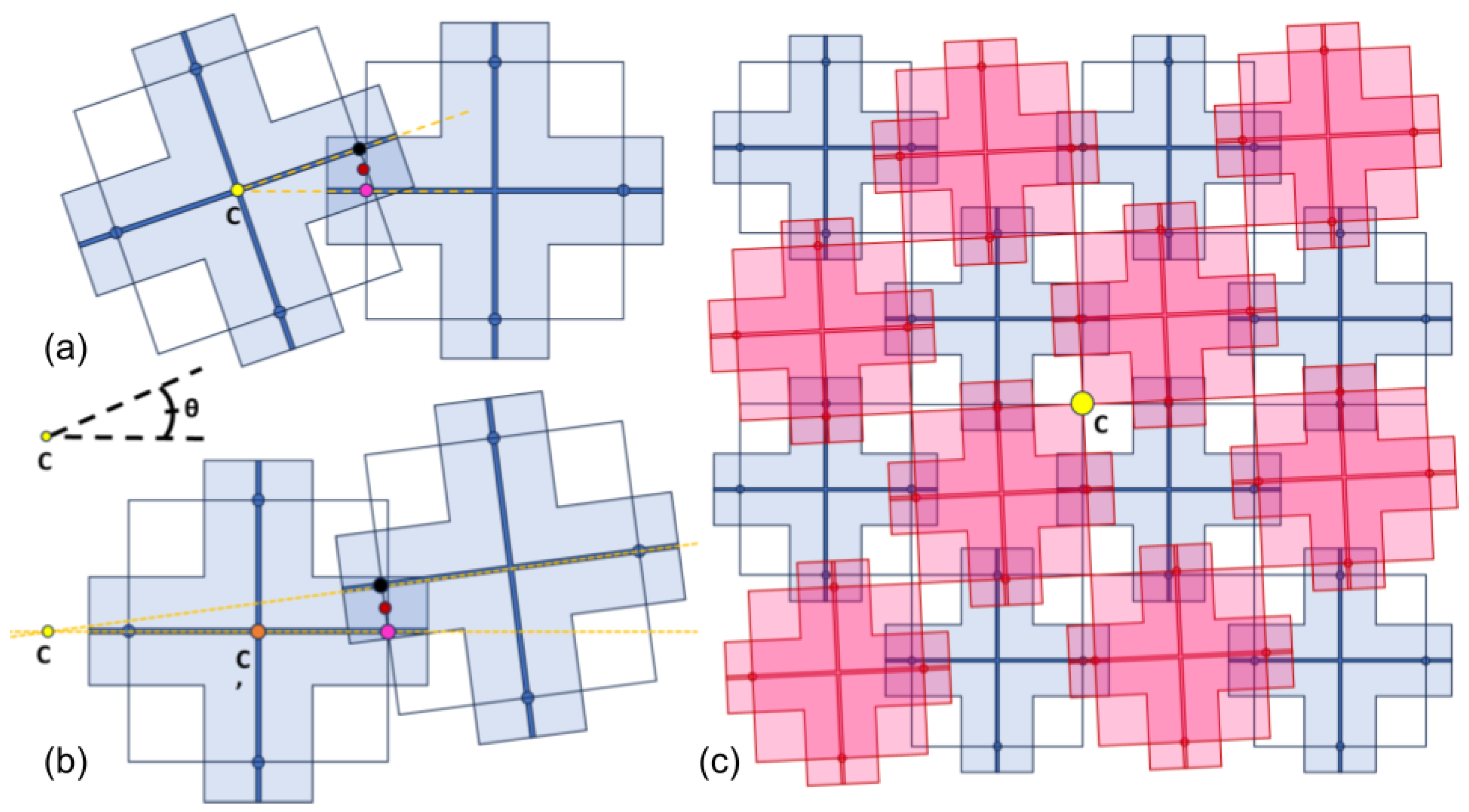
2.3. Misalignment Types
3. Physical Experiment
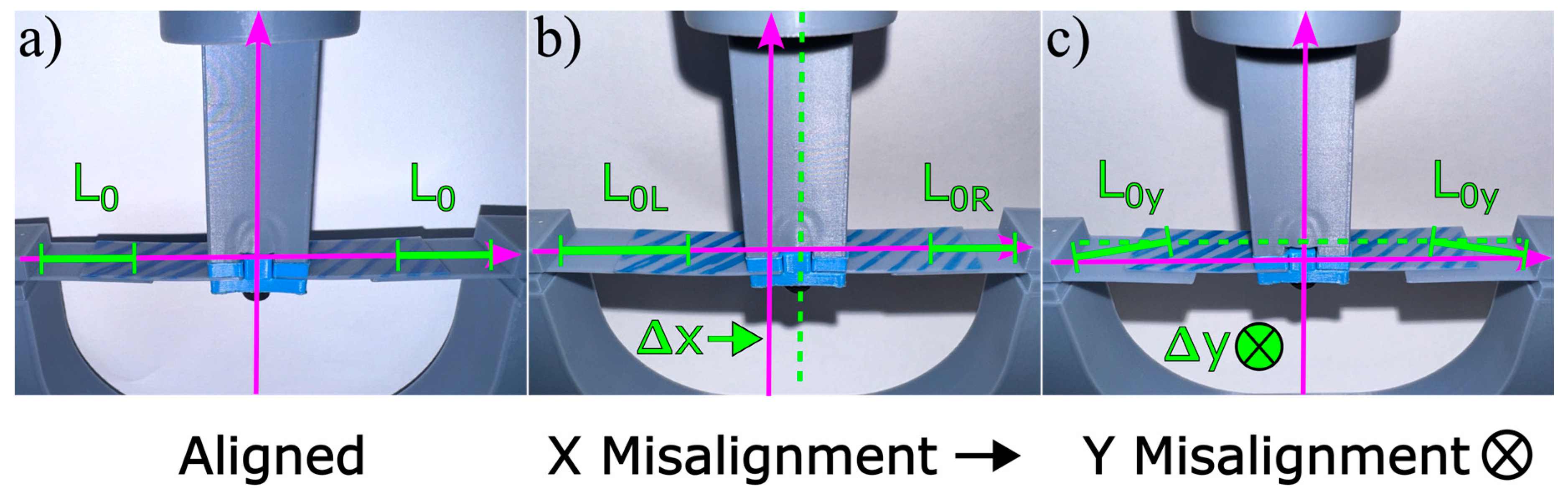
3.1. Experimental Setup and Procedure for Cantilevers in Perfect Alignment
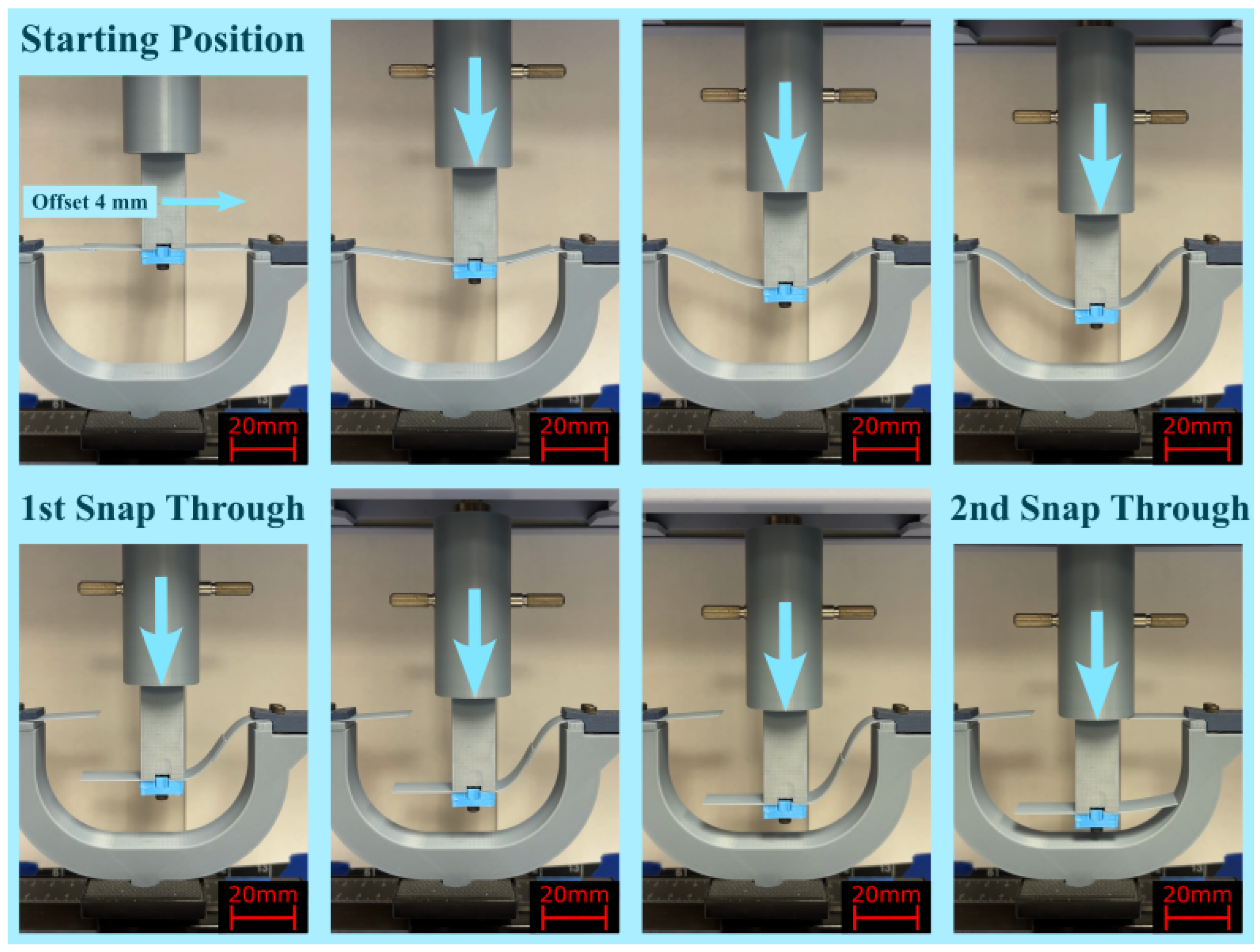
3.2. Experimental Setup and Procedure for Translationally Misaligned Cantilevers
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Effective cantilever length | |
| Left set effective cantilever length | |
| Right set effective cantilever length | |
| y-axis shift effective cantilever length | |
| Overlap length | |
| Cantilever overlap in x direction | |
| Misalignment offset in x direction | |
| Misalignment offset in y direction | |
| M | Misalignment midpoint |
| C | Rotational misalignment center |
| Structure center | |
| Angle of rotational misalignment | |
| Normalized tip deflection | |
| Right set normalized tip deflection | |
| Left set normalized tip deflection | |
| Initial cantilever angle | |
| Normalized downward force | |
| Right set normalized downward force | |
| Left set normalized downward force | |
| Dimensionless arch length | |
| d | Crosshead displacement |
| Initial displacement | |
| Cantilever overlap in y direction | |
| Misalignment offset in y direction | |
| Total insertion force given x misalignment | |
| Total insertion force given y misalignment | |
| Left set insertion force | |
| Right set insertion force | |
| One-sided y misalignment insertion force | |
| Left set rotational effective cantilever length | |
| Right set rotational effective cantilever length |
Appendix A. Coefficients of Polynomial Fits
Appendix A.1. Coefficients of Polynomial Fits for Normalized Downward Force

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients of Polynomial Fits for Normalized Downward Force | Delta B Limits | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Angle (°) | C | Min. | Max. | |||||||||
| −60 | ||||||||||||
| −55 | ||||||||||||
| −50 | ||||||||||||
| −45 | ||||||||||||
| −40 | ||||||||||||
| −35 | ||||||||||||
| −30 | ||||||||||||
| −25 | ||||||||||||
| −20 | ||||||||||||
| −15 | ||||||||||||
| −10 | ||||||||||||
| −5 | ||||||||||||
| 0 | ||||||||||||
| 5 | ||||||||||||
| 10 | ||||||||||||
| 15 | ||||||||||||
| 20 | ||||||||||||
| 25 | ||||||||||||
| 30 | ||||||||||||
| 35 | ||||||||||||
| 40 | ||||||||||||
| 45 | ||||||||||||
| 50 | ||||||||||||
| 55 | ||||||||||||
| 60 | ||||||||||||
Appendix A.2. Coefficients of Polynomial Fits for Normalized Cantilever Length
| Coefficients of Polynomial Fits for Normalized Cantilever Length | Delta B Limits | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Angle (°) | C | Min. | Max. | |||||||||
| −60 | ||||||||||||
| −55 | ||||||||||||
| −50 | ||||||||||||
| −45 | ||||||||||||
| −40 | ||||||||||||
| −35 | ||||||||||||
| −30 | ||||||||||||
| −25 | ||||||||||||
| −20 | ||||||||||||
| −15 | ||||||||||||
| −10 | ||||||||||||
| −5 | ||||||||||||
| 0 | ||||||||||||
| 5 | ||||||||||||
| 10 | ||||||||||||
| 15 | ||||||||||||
| 20 | ||||||||||||
| 25 | ||||||||||||
| 30 | ||||||||||||
| 35 | ||||||||||||
| 40 | ||||||||||||
| 45 | ||||||||||||
| 50 | ||||||||||||
| 55 | ||||||||||||
| 62 | ||||||||||||
Appendix B. Experimental Stages in X Misalignment
References
- Li, H.; Li, Q.; Li, Y.; Yang, Z.; Quhe, R.; Sun, X.; Wang, Y.; Xu, L.; Peng, L.m.; Tian, H.; et al. Recent Experimental Breakthroughs on 2D Transistors: Approaching the Theoretical Limit. Adv. Funct. Mater. 2024, 34, 2402474. [Google Scholar] [CrossRef]
- Van Helleputte, N.; Even, A.J.G.; Leonardi, F.; Stanzione, S.; Song, M.; Garripoli, C.; Sijbers, W.; Liu, Y.H.; Van Hoof, C. Miniaturized Electronic Circuit Design Challenges for Ingestible Devices. J. Microelectromech. Syst. 2020, 29, 645–652. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, G.; Zheng, X.; Chen, F.; Duan, H. Emerging miniaturized energy storage devices for microsystem applications: From design to integration. Int. J. Extrem. Manuf. 2020, 2, 042001. [Google Scholar] [CrossRef]
- Lau, J.H. Recent Advances and Trends in Advanced Packaging. IEEE Trans. Compon. Packag. Manuf. Technol. 2022, 12, 228–252. [Google Scholar] [CrossRef]
- Li, T.; Hou, J.; Yan, J.; Liu, R.; Yang, H.; Sun, Z. Chiplet Heterogeneous Integration Technology-Status and Challenges. Electronics 2020, 9, 670. [Google Scholar] [CrossRef]
- Heidel, N.D.; Usechak, N.G.; Dohrman, C.L.; Conway, J.A. A Review of Electronic-Photonic Heterogeneous Integration at DARPA. IEEE J. Sel. Top. Quantum Electron. 2016, 22, 482–490. [Google Scholar] [CrossRef]
- Zhang, S.; Li, Z.; Zhou, H.; Li, R.; Wang, S.; Paik, K.W.; He, P. Challenges and recent prospectives of 3D heterogeneous integration. e-Prime Adv. Electr. Eng. Electron. Energy 2022, 2, 100052. [Google Scholar] [CrossRef]
- Fallahtafti, N.; Rangarajan, S.; Hadad, Y.; Arvin, C.; Sikka, K.; Hoang, C.H.; Mohsenian, G.; Radmard, V.; Schiffres, S.; Sammakia, B. Shape optimization of hotspot targeted micro pin fins for heterogeneous integration applications. Int. J. Heat Mass Transf. 2022, 192, 122897. [Google Scholar] [CrossRef]
- Pentapati, S.; Lim, S.K. Heterogeneous Monolithic 3-D IC Designs: Challenges, EDA Solutions, and Power, Performance, Cost Tradeoffs. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2024, 32, 413–421. [Google Scholar] [CrossRef]
- Brown, J.J.; Bright, V.M. Mechanical Interfacing Using Suspended Ultrathin Films From ALD. J. Microelectromech. Syst. 2016, 25, 356–361. [Google Scholar] [CrossRef]
- Bolmin, O.; Young, B.; Leathe, N.; Noell, P.J.; Boyce, B.L. Interlocking metasurfaces. J. Mater. Sci. 2023, 58, 411–419. [Google Scholar] [CrossRef]
- Young, B.; Bolmin, O.; Boyce, B.; Noell, P. Synergistic strengthening in interlocking metasurfaces. Mater. Des. 2023, 227, 111798. [Google Scholar] [CrossRef]
- Ji, S.; Chen, X. Enhancing the interfacial binding strength between modular stretchable electronic components. Natl. Sci. Rev. 2022, 10, nwac172. [Google Scholar] [CrossRef]
- Manushyna, D.; Atzrodt, H.; Deschauer, N. Conceptual development of vibroacoustic metamaterial structures for thin-walled composite structures for aerospace applications. In Proceedings of the 2020 Fourteenth International Congress on Artificial Materials for Novel Wave Phenomena (Metamaterials), New York, NY, USA, 27 September–4 October 2020; pp. 409–411. [Google Scholar] [CrossRef]
- Xu, R.J.; Lin, Y.S. Actively MEMS-Based Tunable Metamaterials for Advanced and Emerging Applications. Electronics 2022, 11, 243. [Google Scholar] [CrossRef]
- Garcia, G.A.; Wakumoto, K.; Brown, J.J. Design of Microfabricated Mechanically Interlocking Metamaterials for Reworkable Heterogeneous Integration. J. Electron. Packag. 2021, 144, 041004. [Google Scholar] [CrossRef]
- Young, B.; Smith, R.; Grutzik, S.; Boyce, B.; Noell, P. The Toughness of Interlocking Metasurfaces. Adv. Eng. Mater. 2024, 26, 2400150. [Google Scholar] [CrossRef]
- Elsayed, A.; Guleria, T.; Atli, K.C.; Bolmin, O.; Young, B.; Noell, P.J.; Boyce, B.L.; Elwany, A.; Arroyave, R.; Karaman, I. Active interlocking metasurfaces enabled by shape memory alloys. Mater. Des. 2024, 244, 113137. [Google Scholar] [CrossRef]
- Harish, V.; Sahoo, K.; Zheng, K.; Park, G.; Chen, H.W.; Verhaverbeke, S.; Iyer, S.S. Fine Pitch (≤10 μm) Die to Wafer Cu-Cu TCB on Organic Polymer Build Up Films. In Proceedings of the 2024 IEEE 74th Electronic Components and Technology Conference (ECTC), Denver, CO, USA, 28–31 May 2024; pp. 2178–2183. [Google Scholar] [CrossRef]
- Wang, L.; Wang, W.; Zeng, K.; Deng, J.; Rietveld, G.; Hueting, R.J.E. Opportunities and Challenges of Pressure Contact Packaging for Wide Bandgap Power Modules. IEEE Trans. Power Electron. 2024, 39, 2401–2419. [Google Scholar] [CrossRef]
- Maeda, J. Mechanical Testing of Interlocking Microfabricated Metamaterial Surfaces. Master’s Thesis, University of Hawai‘i at Ma¯noa, Honolulu, HI, USA, 2022. [Google Scholar]
- Jiang, X.; Tao, Z.; Yu, T.; Jiang, B.; Zhong, Y.; Yu, D. Fine Pitch Wafer-to-Wafer Hybrid Bonding for Three-Dimensional Integration. In Proceedings of the 2023 24th International Conference on Electronic Packaging Technology (ICEPT), Shihezi, China, 8–11 August 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Gonzalez, J.L.; Rajan, S.K.; Brescia, J.R.; Bakir, M.S. A Substrate-Agnostic, Submicrometer PSAS-to-PSAS Self-Alignment Technology for Heterogeneous Integration. IEEE Trans. Compon. Packag. Manuf. Technol. 2021, 11, 2061–2068. [Google Scholar] [CrossRef]
- Miodragovic Vella, I.; Markovic, S. Topological Interlocking Assembly: Introduction to Computational Architecture. Appl. Sci. 2024, 14, 6409. [Google Scholar] [CrossRef]
- Gilibert, P.; Mesnil, R.; Baverel, O. Rule-based generative design of translational and rotational interlocking assemblies. Autom. Constr. 2022, 135, 104142. [Google Scholar] [CrossRef]
- Mousavian, E.; Bagi, K.; Casapulla, C. Interlocking joint shape optimization for structurally informed design of block assemblages. J. Comput. Des. Eng. 2022, 9, 1279–1297. [Google Scholar] [CrossRef]
- Thakur, S.C.; Ooi, J.Y.; Ahmadian, H. Scaling of discrete element model parameters for cohesionless and cohesive solid. Powder Technol. 2016, 293, 130–137. [Google Scholar] [CrossRef]
- Hemker, K.J.; Sharpe, W.N., Jr. Microscale characterization of mechanical properties. Annu. Rev. Mater. Res. 2007, 37, 93–126. [Google Scholar] [CrossRef]
- Mendez, P.F.; Furrer, R.; Ford, R.; Ordóñez, F. Scaling laws as a tool of materials informatics. JOM 2008, 60, 60–66. [Google Scholar] [CrossRef]
- Zhao, C. Giant Flexoelectric Effect in Snapping Surfaces Enhanced by Graded Stiffness. Acta Mech. Solida Sin. 2024, 37, 528–540. [Google Scholar] [CrossRef]
- Liu, X.; Lu, R. Testing System for the Mechanical Properties of Small-Scale Specimens Based on 3D Microscopic Digital Image Correlation. Sensors 2020, 20, 3530. [Google Scholar] [CrossRef] [PubMed]
- Brown, J.J.; Mettier, R.; Supekar, O.; Bright, V.M. Nonlinear Mechanics of Interlocking Cantilevers. J. Appl. Mech. 2017, 84, 121012. [Google Scholar] [CrossRef]
- Ma, F.; Chen, G. Modeling Large Planar Deflections of Flexible Beams in Compliant Mechanisms Using Chained Beam-Constraint-Model1. J. Mech. Rob. 2015, 8, 021018. [Google Scholar] [CrossRef]
- Gonzalez-Cruz, C.A.; Jauregui-Correa, J.C.; Herrera Ruiz, G. Nonlinear Response of Cantilever Beams Due to Large Geometric Deformations: Experimental Validation. J. Mech. Eng. 2016, 62, 187–196. [Google Scholar] [CrossRef]
- Nakamura, M.; Rocheville, E.; Peterson, K.; Heyes, C.; Brown, J. Cantilever Misalignment Interaction Dataset. Zenodo 2025. [Google Scholar] [CrossRef]
- Nakamura, M. Nanosystemslab/Cantilever_Misalignment_Interaction: Initial Release of Cantilever Misalignment Interaction Data Processing (v1.0.0). Zenodo 2025. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakamura, M.; Heyes, C.; Rocheville, E.; Peterson, K.; Brown, J.J. Misalignment in Mechanical Interlocking Heterogeneous Integration: Emergent Behavior and Geometry Optimization. Micromachines 2025, 16, 305. https://doi.org/10.3390/mi16030305
Nakamura M, Heyes C, Rocheville E, Peterson K, Brown JJ. Misalignment in Mechanical Interlocking Heterogeneous Integration: Emergent Behavior and Geometry Optimization. Micromachines. 2025; 16(3):305. https://doi.org/10.3390/mi16030305
Chicago/Turabian StyleNakamura, Matthew, Corrisa Heyes, Ethan Rocheville, Kirsten Peterson, and Joseph J. Brown. 2025. "Misalignment in Mechanical Interlocking Heterogeneous Integration: Emergent Behavior and Geometry Optimization" Micromachines 16, no. 3: 305. https://doi.org/10.3390/mi16030305
APA StyleNakamura, M., Heyes, C., Rocheville, E., Peterson, K., & Brown, J. J. (2025). Misalignment in Mechanical Interlocking Heterogeneous Integration: Emergent Behavior and Geometry Optimization. Micromachines, 16(3), 305. https://doi.org/10.3390/mi16030305