
Trajectory Tracking Using Cumulative Risk–Sensitive Finite Impulse Response Filters


Abstract
1. Introduction
- This paper introduces a new robust FIR filter based on a cumulative risk–sensitive cost function, which accounts for the total estimation error accumulated from the initial time to the present moment within the estimation horizon by reformulating the complex exponential cost function into a tractable max–min optimization problem.
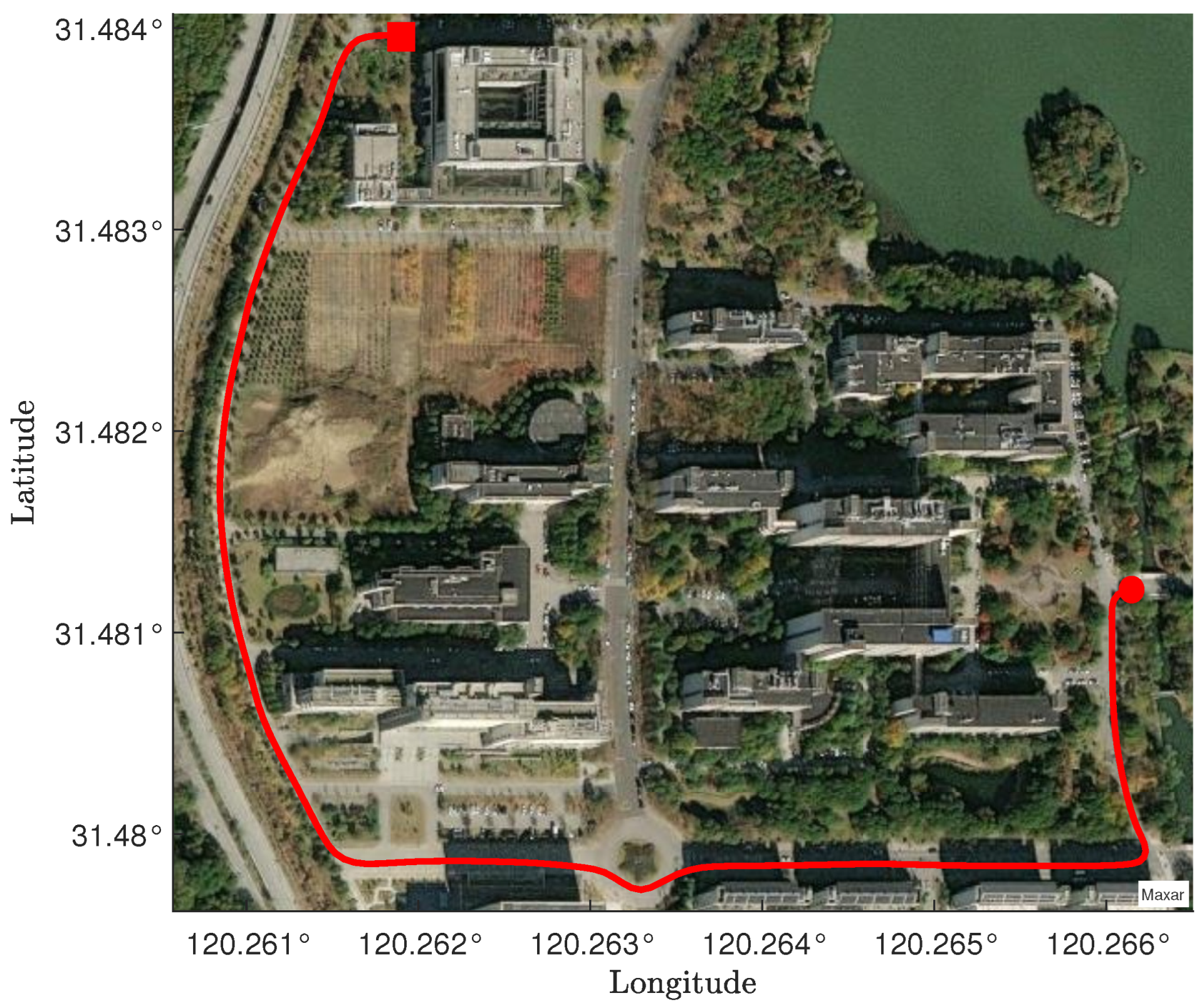
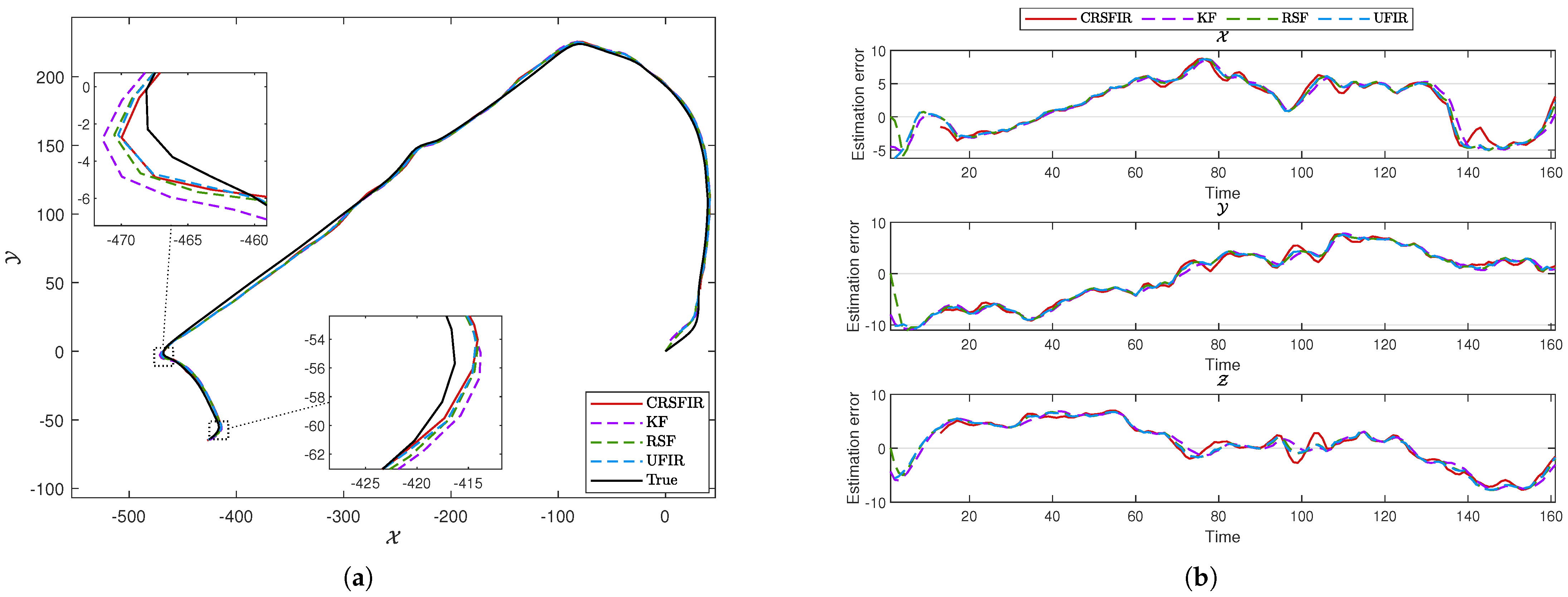
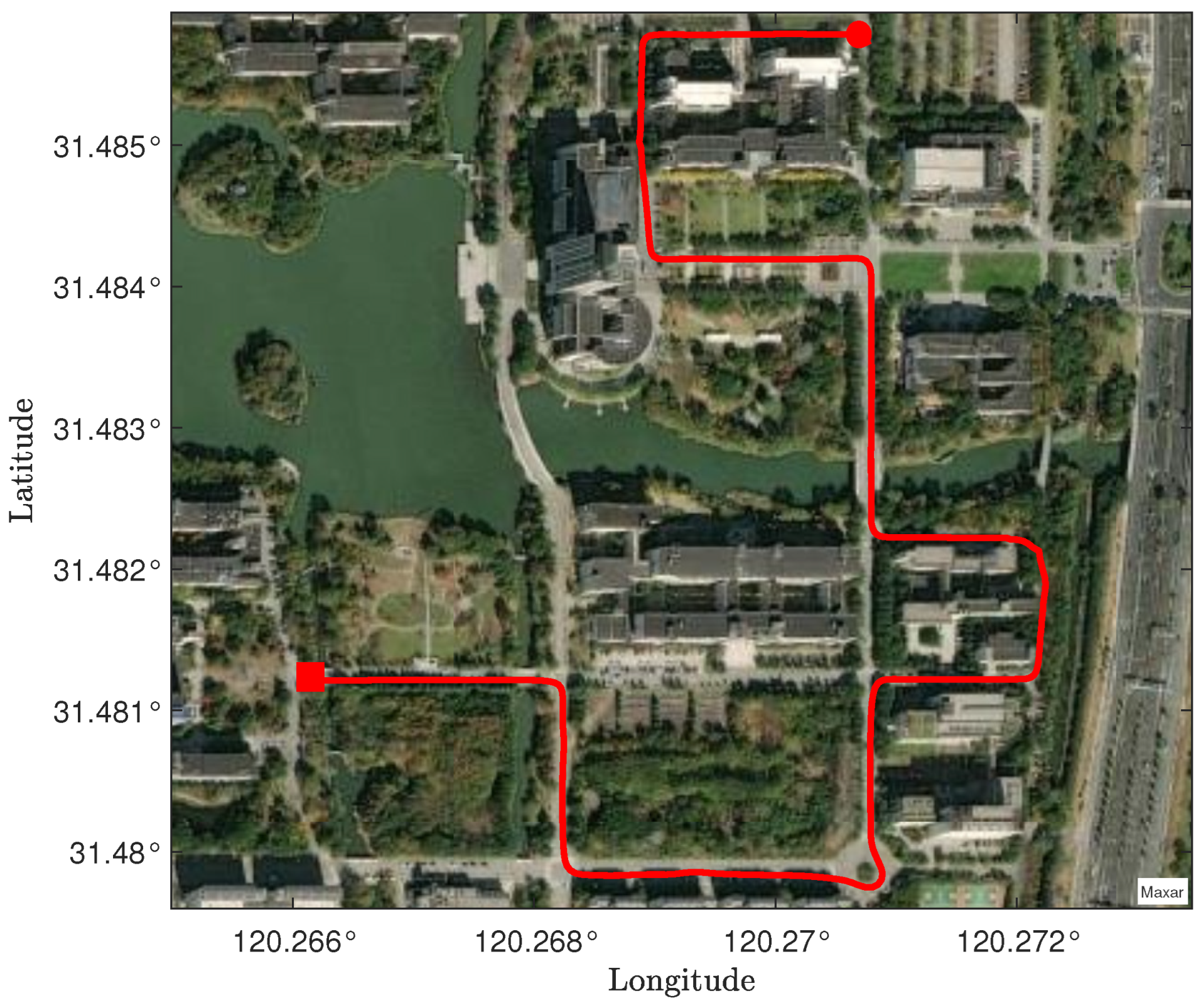
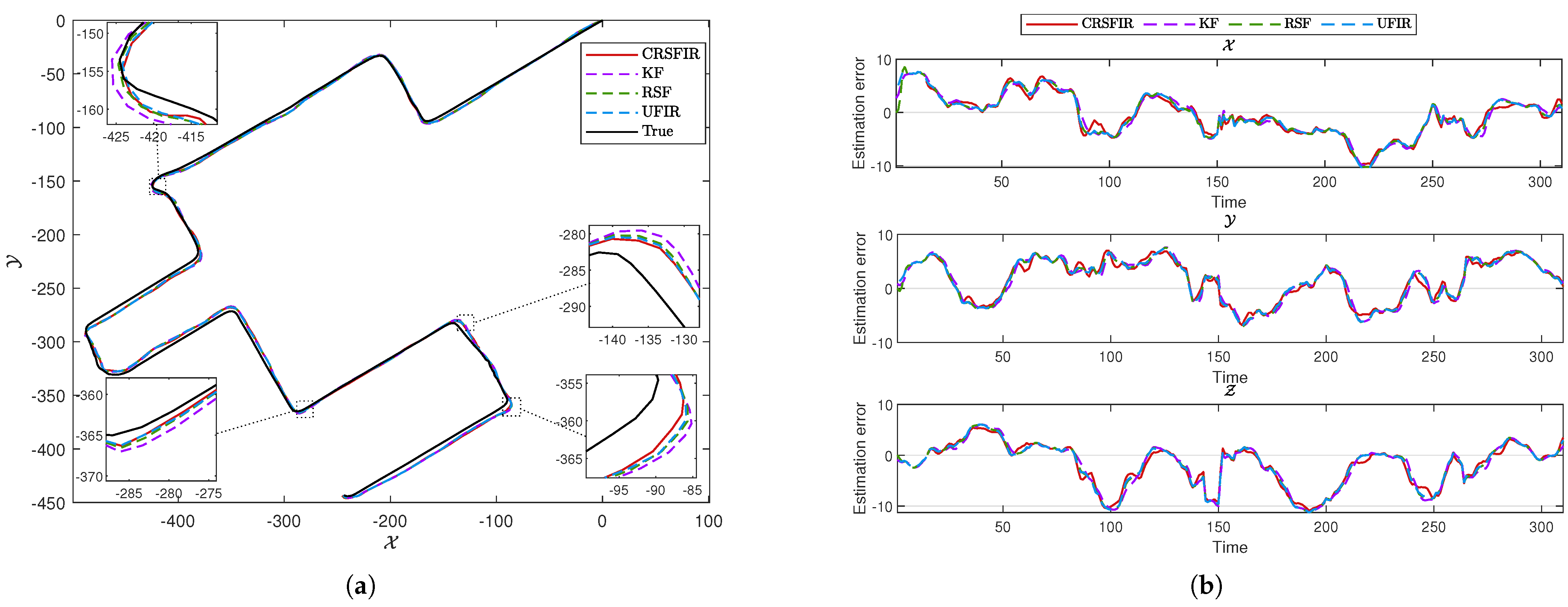
- To validate the proposed approach, a trajectory tracking experiment is conducted to assess the performance of four filters. The experimental results demonstrate that the proposed cumulative risk–sensitive FIR (CRSFIR) filter outperforms the KF, risk–sensitive filter (RSF), and UFIR filter in terms of trajectory tracking accuracy.
2. Extend State–Space Model and Problem Formulation
3. Cumulative Risk–Sensitive FIR Filter
| Algorithm 1 CRSFIR filter algorithm. |
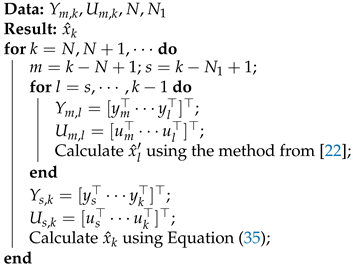 |
4. GNSS–Based Tracking of a Moving Vehicle
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Malek-Zavarei, M.; Jamshidi, M. Time-Delay Systems: Analysis, Optimization and Applications; Elsevier Science Incorporated: Amsterdam, The Netherlands, 1987. [Google Scholar]
- Wang, H.; Kirubarajan, T.; Bar-Shalom, Y. Precision large scale air traffic surveillance using IMM/assignment estimators. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 255–266. [Google Scholar]
- Zhao, F.; Guibas, L.J. Wireless Sensor Networks: An Information Processing Approach; Morgan Kaufmann: Burlington, MA, USA, 2004. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms, and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Singer, R.A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1970, 4, 473–483. [Google Scholar] [CrossRef]
- Cox, H. On the estimation of state variables and parameters for noisy dynamic systems. IEEE Trans. Automat. Contr. 1964, 9, 5–12. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Boston, MA, USA, 15–18 July 1997; pp. 182–193. [Google Scholar]
- Maybeck, P.S.; Jensen, R.L.; Harnly, D.A. An adaptive extended Kalman filter for target image tracking. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 173–180. [Google Scholar] [CrossRef]
- Prevost, C.G.; Desbiens, A.; Gagnon, E. Extended Kalman filter for state estimation and trajectory prediction of a moving object detected by an unmanned aerial vehicle. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 1805–1810. [Google Scholar]
- Swalaganata, G.; Affriyenni, Y. Moving object tracking using hybrid method. In Proceedings of the 2018 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 9–11 October 2018; pp. 607–611. [Google Scholar]
- Hanlon, P.D.; Maybeck, P.S. Characterization of Kalman filter residuals in the presence of mismodeling. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 114–131. [Google Scholar]
- Kwon, W.H.; Han, S.H. Receding Horizon Control: Model Predictive Control for State Models; Springer & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Shmaliy, Y.S. An iterative Kalman-like algorithm ignoring noise and initial conditions. IEEE Trans. Signal Process. 2011, 59, 2465–2473. [Google Scholar]
- Shmaliy, Y.S.; Lehmann, F.; Zhao, S.; Ahn, C.K. Comparing robustness of the Kalman, H∞, and UFIR Filters. IEEE Trans. Signal Process. 2018, 66, 3447–3458. [Google Scholar]
- Pak, J.M.; Kim, P.S.; You, S.H.; Lee, S.S.; Song, M.K. Extended least square unbiased FIR filter for target tracking using the constant velocity motion model. Int. J. Control Autom. Syst. 2017, 15, 947–951. [Google Scholar] [CrossRef]
- Uribe-Murcia, K.; Shmaliy, Y.S.; Andrade-Lucio, J.A. UFIR filtering for GPS-based tracking over WSNs with delayed and missing data. J. Electr. Comput. Eng. 2018, 2018, 7456010. [Google Scholar] [CrossRef]
- Zhao, S.; Shmaliy, Y.S.; Ahn, C.K.; Zhao, C. Probabilistic monitoring of correlated sensors for nonlinear processes in state space. IEEE Trans. Ind. Electron. 2020, 67, 2294–2303. [Google Scholar]
- Pale-Ramon, E.G.; Shmaliy, Y.S.; Morales-Mendoza, L.J.; Lee, M.G. Finite impulse response (FIR) filters and Kalman filter for object tracking process. In Proceedings of the International Conference on Computing, Control and Industrial Engineering, Singapore, 16–17 October 2021; pp. 665–684. [Google Scholar]
- Zhao, S.; Li, Y.; Zhang, C.; Luan, X.; Liu, F.; Tan, R. Robustification of finite impulse response filter for nonlinear systems with model uncertainties. IEEE Trans. Instrum. Meas. 2023, 72, 1–9. [Google Scholar]
- Gao, S.; Luan, X.; Huang, B.; Zhao, S.; Liu, F. A transfer state estimator for uncertain parameters and noise statistics. IFAC-PapersOnLine 2024, 58, 192–197. [Google Scholar] [CrossRef]
- Han, S.H. Risk sensitive FIR filters for stochastic discrete-time state space models. Int. J. Innov. Comput. Inf. Control 2012, 8, 1–12. [Google Scholar]
- Han, S.H.; Kim, P.S.; Kwon, W.H. Receding horizon FIR filter with estimated horizon initial state and its application to aircraft engine systems. In Proceedings of the 1999 IEEE International Conference on Control Applications, Waikiki, HI, USA, 25–27 August 1999; pp. 33–38. [Google Scholar]
- Hassibi, B.; Sayed, A.H.; Kailath, T. Indefinite-Quadratic Estimation and Control: A Unified Approach to H2 and H∞ Theories; SIAM: Philadelphia, PA, USA, 1999. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CRSFIR | KF | RSF | UFIR | |
|---|---|---|---|---|
| 4.2313 | 4.2400 | 4.2114 | 4.2471 | |
| 4.7536 | 5.3023 | 5.1775 | 5.2463 | |
| 4.1208 | 4.1778 | 4.1367 | 4.1564 |
| CRSFIR | KF | RSF | UFIR | |
|---|---|---|---|---|
| 3.7002 | 3.9892 | 3.9818 | 3.9933 | |
| 4.0199 | 4.2116 | 4.1798 | 4.1647 | |
| 4.5875 | 4.6798 | 4.6747 | 4.6727 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhao, S. Trajectory Tracking Using Cumulative Risk–Sensitive Finite Impulse Response Filters. Micromachines 2025, 16, 365. https://doi.org/10.3390/mi16040365
Liu Y, Zhao S. Trajectory Tracking Using Cumulative Risk–Sensitive Finite Impulse Response Filters. Micromachines. 2025; 16(4):365. https://doi.org/10.3390/mi16040365
Chicago/Turabian StyleLiu, Yi, and Shunyi Zhao. 2025. "Trajectory Tracking Using Cumulative Risk–Sensitive Finite Impulse Response Filters" Micromachines 16, no. 4: 365. https://doi.org/10.3390/mi16040365
APA StyleLiu, Y., & Zhao, S. (2025). Trajectory Tracking Using Cumulative Risk–Sensitive Finite Impulse Response Filters. Micromachines, 16(4), 365. https://doi.org/10.3390/mi16040365