
Installation Error Calibration Method for Redundant MEMS-IMU MWD


Abstract
1. Introduction
2. Inclined Six-Position Installation Error Calibration Method
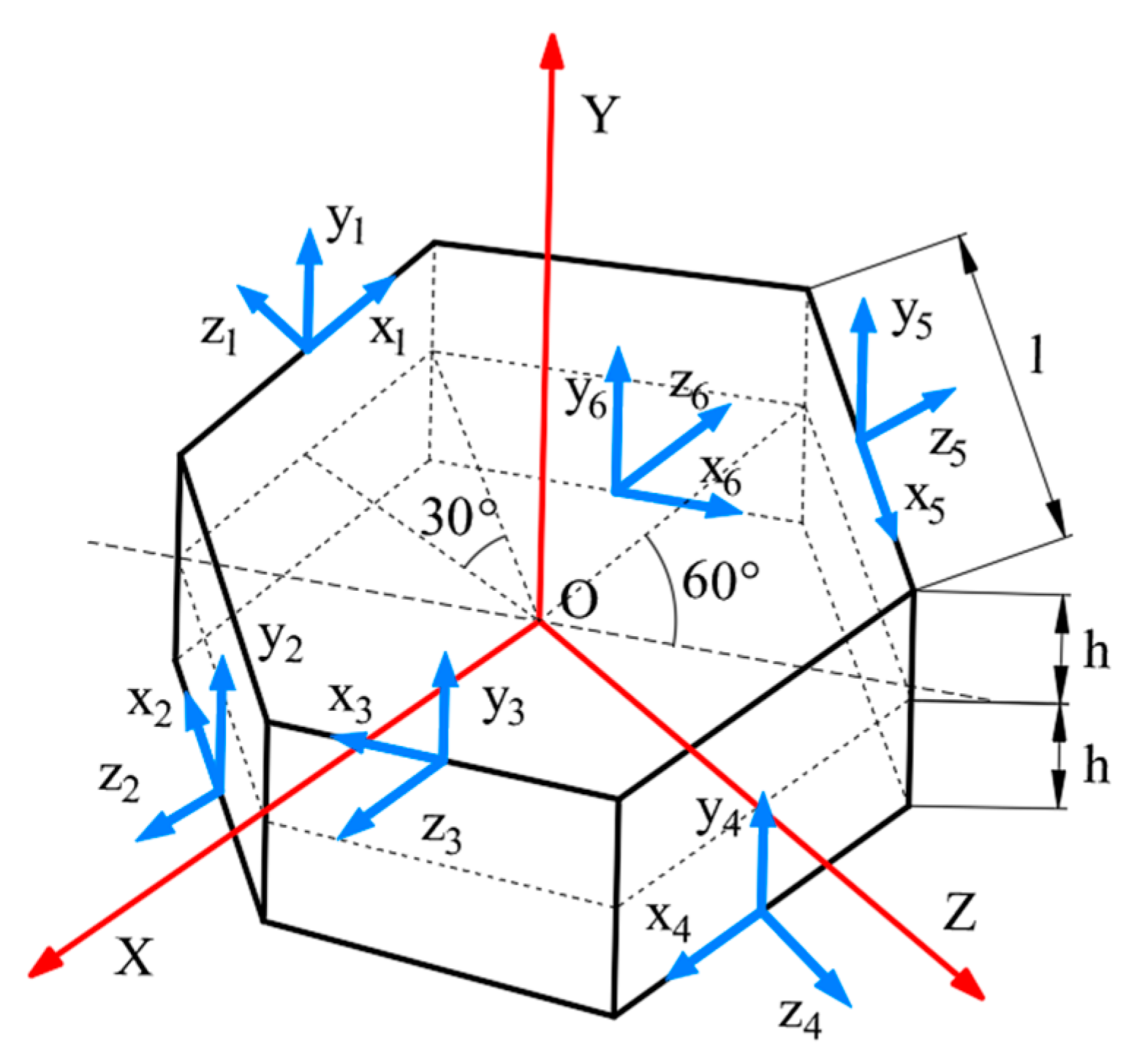
2.1. Redundant Configuration Scheme for MEMS-IMUs
2.2. Inclined Six-Position Installation Error Calibration Scheme
3. Calibration Method Validation
3.1. Simulation Experiment
- (1)
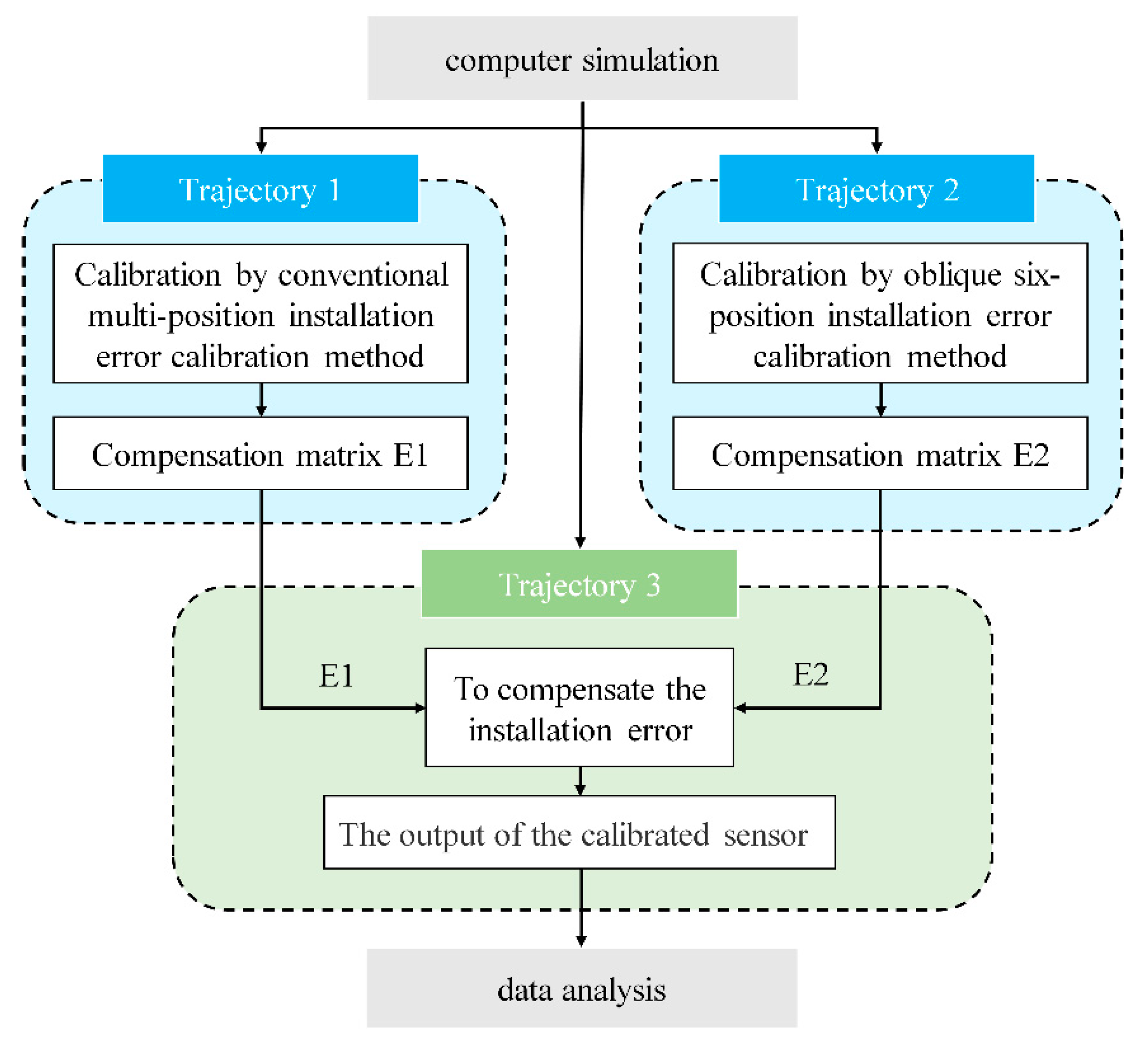
- Simulate the generation of MEMS-IMU Trajectory 1 by sequentially orienting the x-axis, y-axis, and z-axis vertically to obtain three sets of sensor measurements. These measurements serve as theoretical values without installation errors. Subsequently, installation errors (with an error angle of 0.00278° between each pair of axes) were introduced into this trajectory. New measurements were then taken to obtain three sets of values with installation errors, representing the actual values. Using these theoretical and actual values, the compensation matrix E1 was calculated using the conventional compensation method.
- (2)
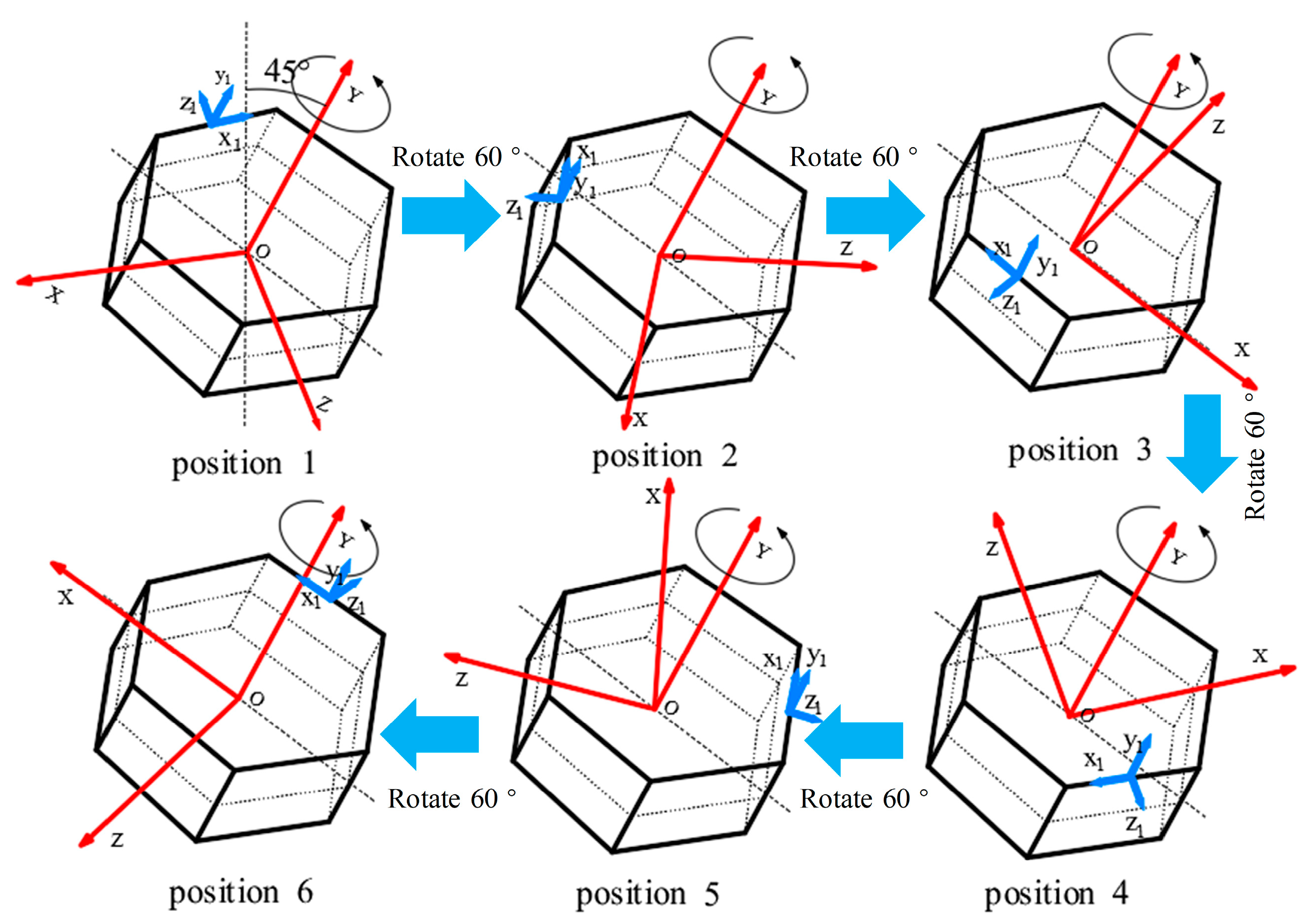
- Simulate the generation of a new MEMS-IMU Trajectory 2 in which the sensor moves from its initial state to a position with a 45° inclination angle and a 0° tool face angle, designated as Position 1. The sensor was then moved to five additional positions with tool face angles of 60°, 120°, 180°, 240°, and 300°. The six sets of measurement data acquired from these positions were used as the theoretical values for the inclined six-position installation error method. Subsequently, the same installation errors as in Trajectory 1 were introduced, and new measurements were taken to obtain six sets of values with installation errors, representing the actual values. Using these theoretical and actual values, the six-position compensation matrix E2 was derived through the least-squares method.
- (3)
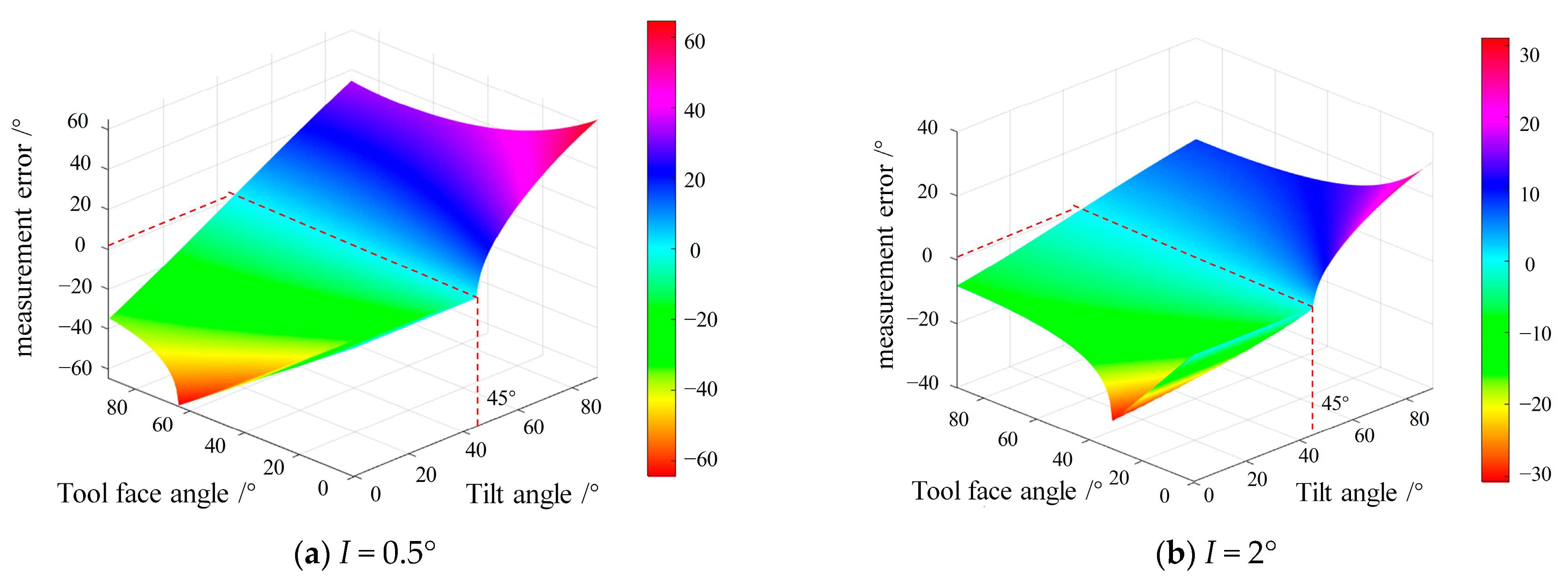
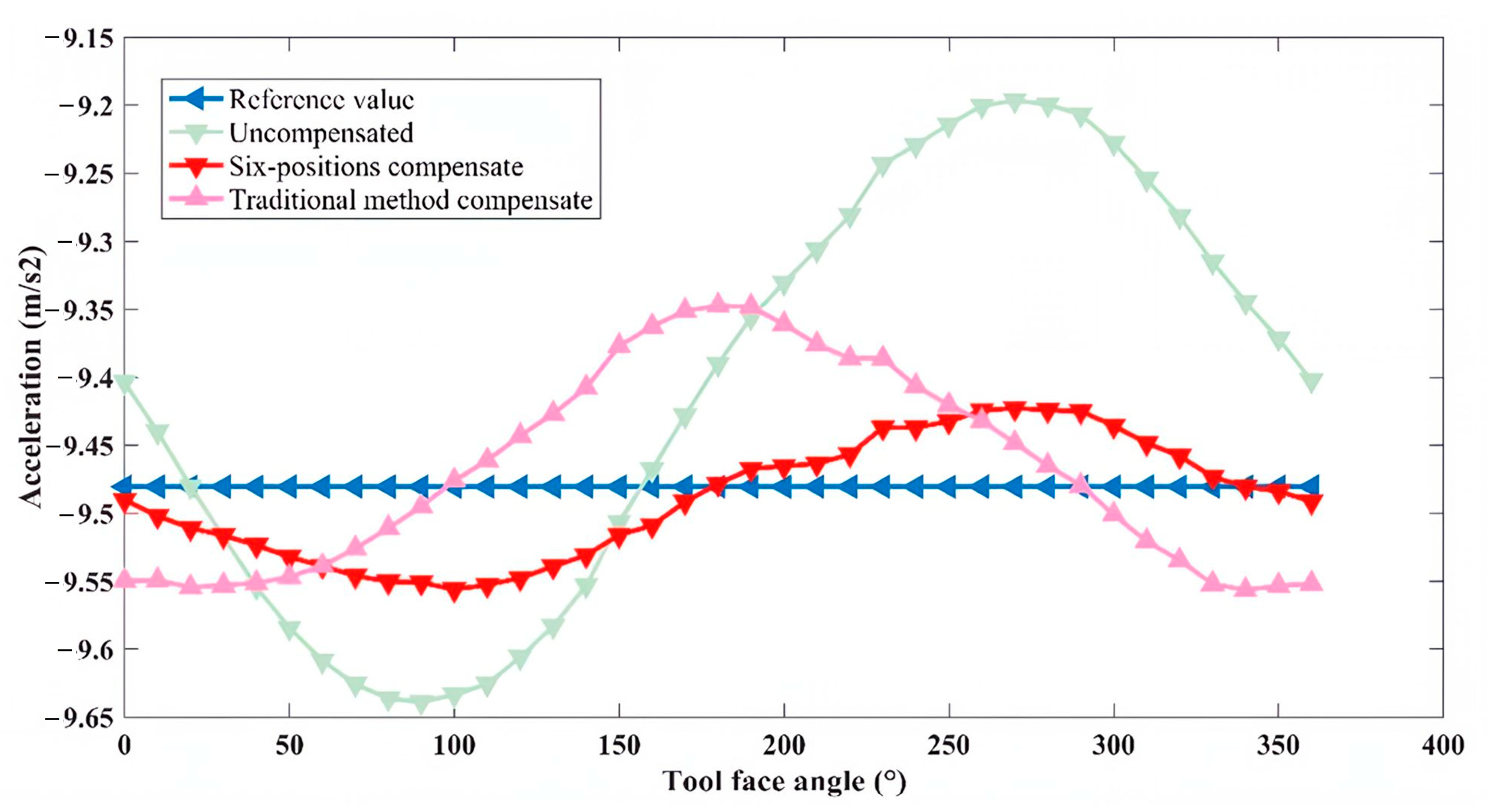
- Simulate the generation of a test comparison MEMS-IMU Trajectory 3. The measurements obtained without installation errors were used as the theoretical reference values. Subsequently, the same installation errors were introduced into Trajectory 3. The compensation matrices E1 and E2 were then applied separately to correct these errors, and the accuracy of each method was compared based on the compensated outputs.
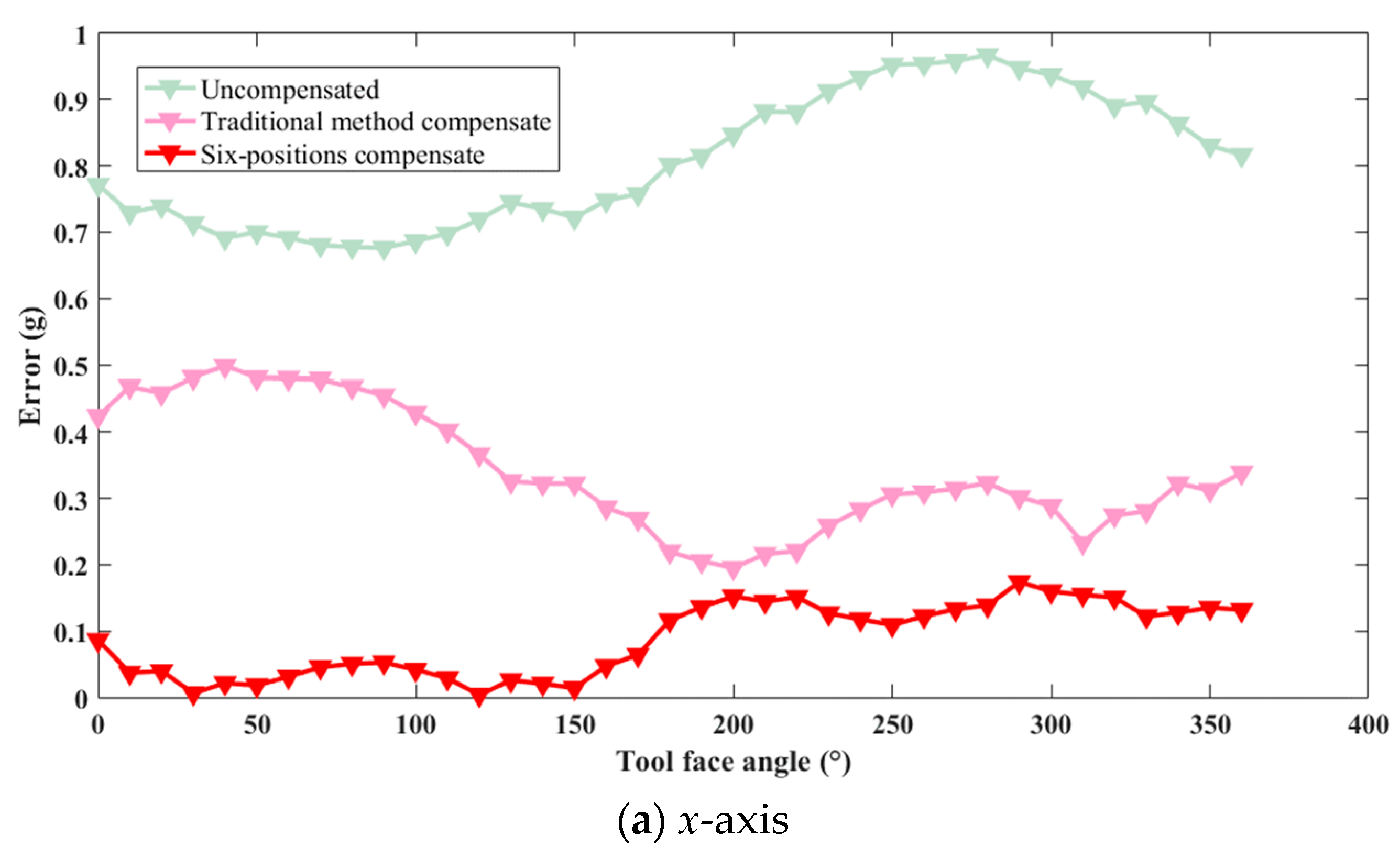
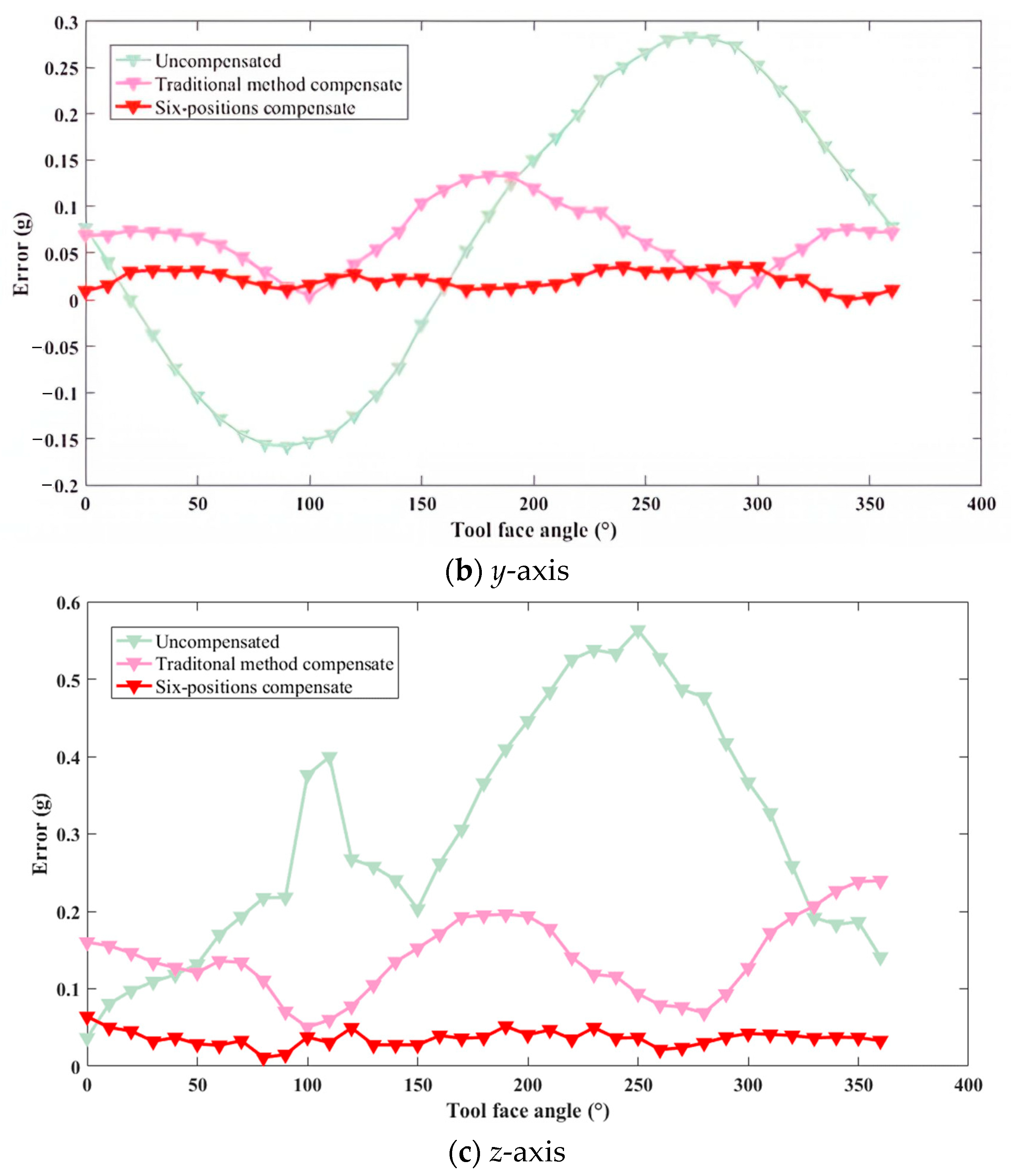
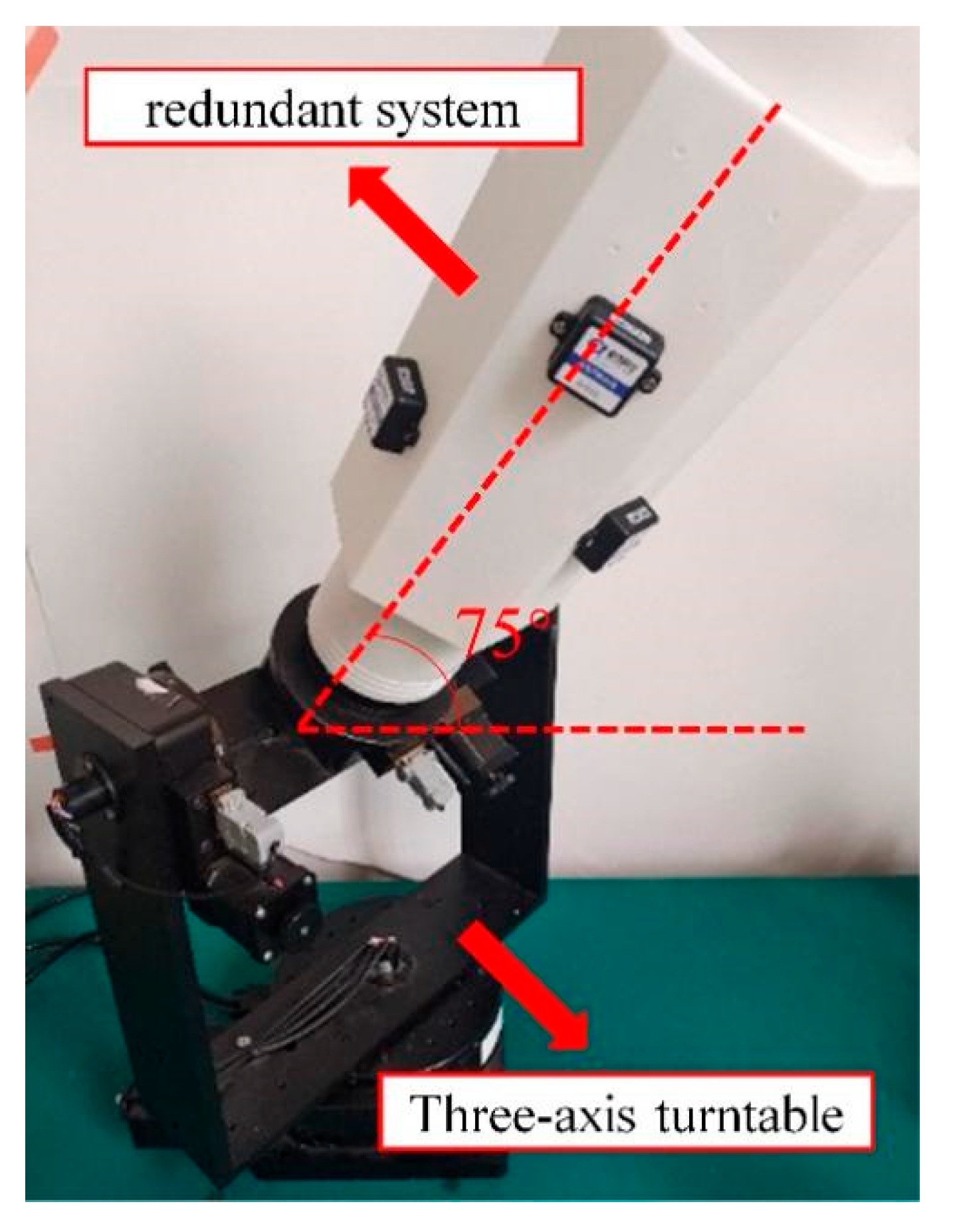
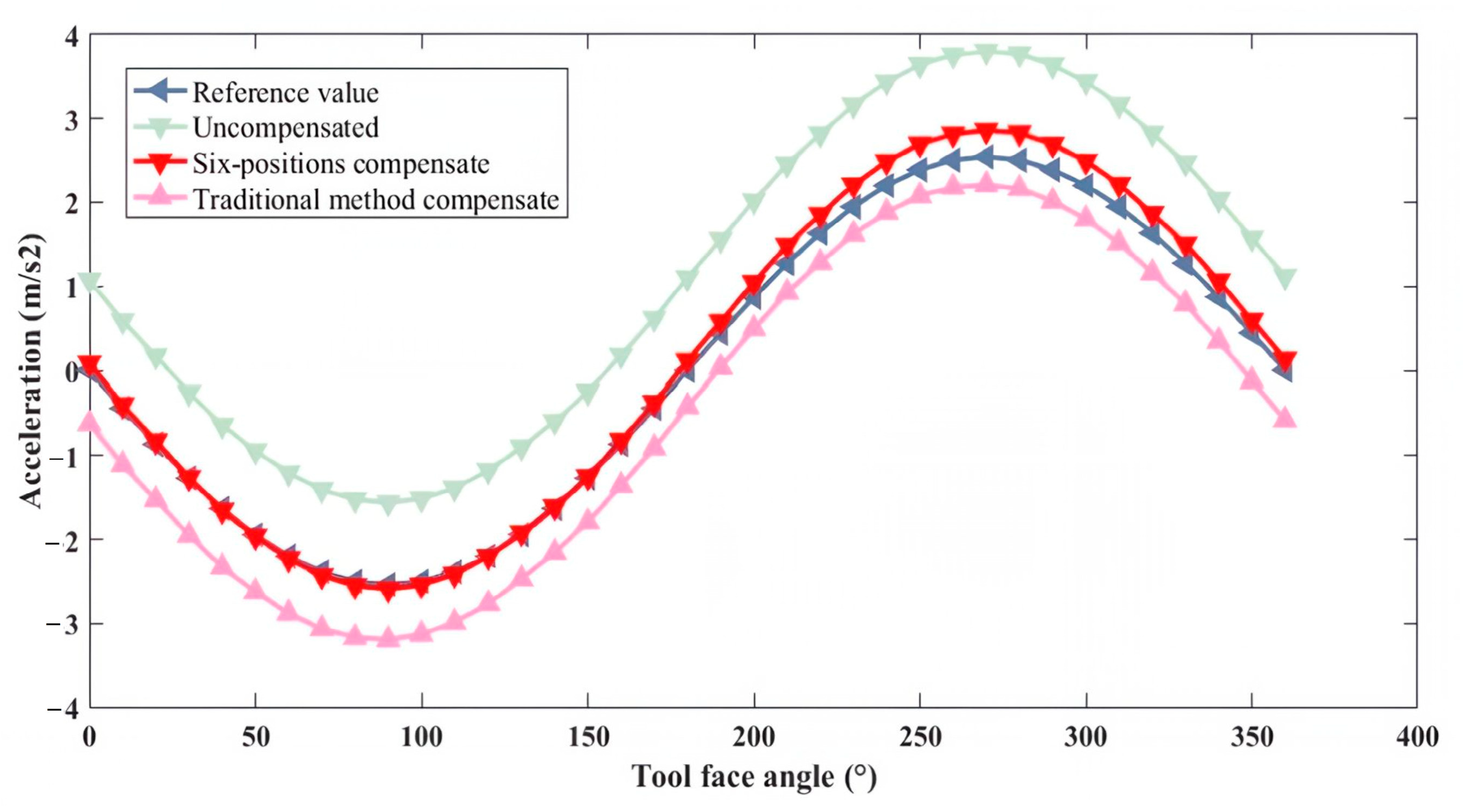
3.2. Experimental Validation of the Effectiveness of the Inclined Six-Position Calibration Method
4. Discussion
- (1)
- During the correction of installation errors, this study did not account for the influence of temperature. The measurement accuracy of MEMS sensors is significantly affected by temperature variations, with notable performance degradation occurring at elevated temperatures.
- (2)
- When comparing the accuracy of the two compensation methods, the simulated drilling trajectories used were relatively simple. As a result, the compensation accuracy under more complex drilling trajectories remains unverified.
- (3)
- Both the theoretical analysis and experimental validation conducted in this study were performed under static conditions. The compensation accuracy under dynamic conditions has not been investigated.
5. Conclusions
- (1)
- This study introduces an innovative six-position compensation method that utilizes an inclined installation configuration of six MEMS-IMUs on a hexagonal prism structure. In this new compensation scheme, the carrier is tilted 45° around the X-axis. Six specific measurement points are then selected at tool face angles of 0°, 60°, 120°, 180°, 240°, and 300° in this tilted state to derive the compensation matrix. This method effectively addresses the issue of low accuracy in compensation matrices during the installation error compensation process for redundant inertial navigation systems by improving the measurement precision and reducing the impact of noise.
- (2)
- The effectiveness of the proposed method was validated through both simulation and experimental testing. The simulation results demonstrated that after calibration using the inclined six-position compensation method, installation errors were reduced by 40.4% compared with conventional multi-position error calibration methods, highlighting the superior performance of the proposed method. These findings were further supported by practical experiments, in which the absolute measurement errors along the x and y axes were reduced by 83% and 68%, respectively. Compared with traditional compensation methods, the sensor accuracy improved by more than 25%, demonstrating the superior compensation effect of the proposed method.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boukredera, F.S.; Youcefi, M.R.; Hadjadj, A.; Ezenkwu, C.P.; Vaziri, V.; Aphale, S.S. Enhancing the drilling efficiency through the application of machine learning and optimization algorithm. Eng. Appl. Artif. Intell. 2023, 126, 107035. [Google Scholar]
- Tang, S.; Wei, J.; Song, D. Research on active cooling technology of measuring instrument while drilling based on insulation tube in high temperature well. Alex. Eng. J. 2024, 108, 371–378. [Google Scholar] [CrossRef]
- Liu, Z.; Yan, W.; Kang, S.; Liu, Z.; Wang, Y.; Zhang, S. Redundant attitude measurement and system reconstruction method for steering drilling tools. Acta Pet. Sin. 2015, 36, 1433–1440. [Google Scholar]
- Razzaq, M.A.; Rocha, R.T.; Tian, Y.; Towfighian, S.; Masri, S.F.; Younis, M.I. Nonparametric identification of a MEMS resonator actuated by levitation forces. Int. J. Non-Linear Mech. 2024, 160, 104633. [Google Scholar] [CrossRef]
- Ramini, A.H.; Hennawi, Q.M.; Younis, M.I. Theoretical and experimental investigation of the nonlinear behavior of an electrostatically actuated in-plane MEMS arch. J. Microelectromech. Syst. 2016, 25, 570–578. [Google Scholar]
- Shao, Y.; He, K. Research on error compensation technology of redundant MEMS-IMU. Appl. Sci. Technol. 2015, 42, 9–12. [Google Scholar]
- Sukkarieh, S. A Low-Cost, Redundant Inertial Measurement Unit for Unmanned Air Vehicles. Int. J. Robot. Res. 2000, 19, 1089–1103. [Google Scholar] [CrossRef]
- Gheorghe, M.V. Study of Virtual Body Frames in Dodecahedron-Based Skew Redundant Inertial Measurement Units. Sens. Transducers 2016, 207, 15–20. [Google Scholar]
- Xue, L.; Yang, B.; Wang, X.; Cai, G.; Shan, B.; Chang, H. MIMU Optimal Redundant Structure and Signal Fusion Algorithm Based on a Non-Orthogonal MEMS Inertial Sensor Array. Micromachines 2023, 14, 759. [Google Scholar] [CrossRef]
- Yang, L. Research on Error Compensation Technology of Redundant MEMS-IMU Based on KF. Master’s Thesis, Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Luo, G. Research on Key Technologies of Redundant MEMS-IMU Error Compensation. Master’s Thesis, Instrument Science and Technology. Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Wang, X.; Zhao, X.; Zhou, B.; Wei, Q.; Zhang, R. Installation error calibration for MEMS angular measurement system in hypersonic wind tunnel. Chin. J. Aeronaut. 2023, 36, 175–186. [Google Scholar] [CrossRef]
- Zheng, Z.; Han, S.; Zheng, K. An eight-position self-calibration method for a dual-axis rotational Inertial Navigation System. Sens. Actuators A Phys. 2015, 232, 39–48. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Niu, X. Estimate the Pitch and Heading Mounting Angles of the IMU for Land Vehicular GNSS/INS Integrated System. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6503–6515. [Google Scholar] [CrossRef]
- Qureshi, U.; Golnaraghi, F. An Algorithm for the In-Field Calibration of a MEMS IMU. IEEE Sens. J. 2017, 17, 7479–7486. [Google Scholar] [CrossRef]
- Song, N.; Cai, Q.; Yang, G.; Yin, H. Analysis and calibration of the mounting errors between inertial measurement unit and turntable in dual-axis rotational inertial navigation system. Meas. Sci. Technol. 2013, 24, 115001–115002. [Google Scholar] [CrossRef]
- Cheuk, C.M.; Lau, T.K.; Lin, K.W.; Liu, Y. Automatic calibration for inertial measurement unit. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision, (ICARCV) 2012, Guangzhou, China, 5–7 December 2012; pp. 1341–1346. [Google Scholar]
- Zheng, Y.; Wang, L.; Zhang, F.; Yang, Z.; Hu, Y. Redundant Configuration Method of MEMS Sensors for Bottom Hole Assembly Attitude Measurement. Micromachines 2024, 15, 804. [Google Scholar] [CrossRef] [PubMed]
- Pan, M. Research on Non Orthogonal Measurement Technology of Carrier Vertical Attitude. Master’s Thesis, Xi’an University of Petroleum, Xi’an, China, 2015. [Google Scholar]
- Pan, M.; Cheng, W.; Li, B.; Chen, C.; Bai, X. Optimization and correction of non orthogonal measurement of vertical attitude. Sens. World 2014, 20, 11–14. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Conventional Compensation Method | Error from True Value | Inclined Six-Position Method | Error from True Value |
|---|---|---|---|---|
| αyx/rad | 0.00250 | 0.00028 | −0.00003 | 0.00281 |
| αzx/rad | −0.04997 | 0.05275 | −0.05108 | 0.05386 |
| αxy/rad | 0.05010 | 0.04732 | 0.00000 | 0.00278 |
| αzy/rad | 0.05000 | 0.04722 | 0.00000 | 0.00278 |
| αxz/rad | 0.05000 | 0.04722 | 0.05138 | 0.04860 |
| αxy/rad | −0.04992 | 0.05270 | 0.00059 | 0.00219 |
| Accelerometer | Minimum Value | Typical Values | Maximum Value |
|---|---|---|---|
| Range (g) | −6 | - | +6 |
| Zero Bias Instability (μg) | 5 | 10 | 15 |
| Full-Temperature Bias Stability (mg) | 3 | 4 | 5 |
| Resolution (mg) | - | 0.5 | - |
| Nonlinear Accuracy (%FS) | - | 0.1 | - |
| Random Walk (m/s/√h) | 0.03 | 0.05 | 0.1 |
| Bandwidth (Hz) | - | 50 | - |
| Gyroscope | Minimum Value | Typical Values | Maximum Value |
|---|---|---|---|
| Range (°/s) | −400 | - | +400 |
| Zero Bias Instability (°/h) | 3 | 4 | 5 |
| Full-Temperature Bias Stability (°/s) | 0.08 | 0.1 | 0.2 |
| Resolution ((°/s) | - | 0.01 | - |
| Nonlinear Accuracy (%FS) | - | 0.1 | - |
| Random Walk (°/h) | 0.2 | 0.3 | 0.5 |
| Bandwidth (Hz) | - | 50 | - |
| Absolute Error of x-Axis (m/s) | Peak-to-Peak | Average Value | Maximum Value | Variance |
|---|---|---|---|---|
| Raw Measurement Data | 1.6340 | 0.8076 | 0.9579 | 0.0983 |
| Data Compensated by Traditional Methods | 0.6079 | 0.3053 | 0.4982 | 0.1256 |
| Data Compensated by New Methods | 0.3157 | 0.1380 | 0.3150 | 0.1318 |
| Absolute Error of x-Axis (m/s) | Peak-to-Peak | Average Value | Maximum Value | Variance |
|---|---|---|---|---|
| Raw Measurement Data | 0.4426 | 0.1456 | 0.2841 | 0.0822 |
| Data Compensated by Traditional Methods | 0.2095 | 0.0656 | 0.1333 | 0.0354 |
| Data Compensated by New Methods | 0.1584 | 0.0467 | 0.1006 | 0.0224 |
| Absolute Error of z-axis (m/s) | Peak-to-Peak | Average Value | Maximum Value | Variance |
|---|---|---|---|---|
| Raw Measurement Data | 0.3142 | 0.2448 | 0.3057 | 0.1939 |
| Data Compensated by Traditional Methods | 0.2031 | 0.1532 | 0.2389 | 0.0795 |
| Data Compensated by New Methods | 0.2153 | 0.1492 | 0.2069 | 0.0754 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qing, Y.; Wang, L.; Zheng, Y. Installation Error Calibration Method for Redundant MEMS-IMU MWD. Micromachines 2025, 16, 391. https://doi.org/10.3390/mi16040391
Qing Y, Wang L, Zheng Y. Installation Error Calibration Method for Redundant MEMS-IMU MWD. Micromachines. 2025; 16(4):391. https://doi.org/10.3390/mi16040391
Chicago/Turabian StyleQing, Yin, Lu Wang, and Yu Zheng. 2025. "Installation Error Calibration Method for Redundant MEMS-IMU MWD" Micromachines 16, no. 4: 391. https://doi.org/10.3390/mi16040391
APA StyleQing, Y., Wang, L., & Zheng, Y. (2025). Installation Error Calibration Method for Redundant MEMS-IMU MWD. Micromachines, 16(4), 391. https://doi.org/10.3390/mi16040391