
Flexible Pressure Sensor with Tunable Sensitivity and a Wide Sensing Range, Featuring a Bilayer Porous Structure



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Chemicals
2.2. Preparation of BLPS Sponge
2.3. Preparation of CNT Solution
2.4. Fabrication of the BLPS Sensor
2.5. Characterization and Measurements
3. Results
3.1. Physical Structure Characterization
3.2. Sensing Mechanism
3.3. Basic Sensing Characteristics
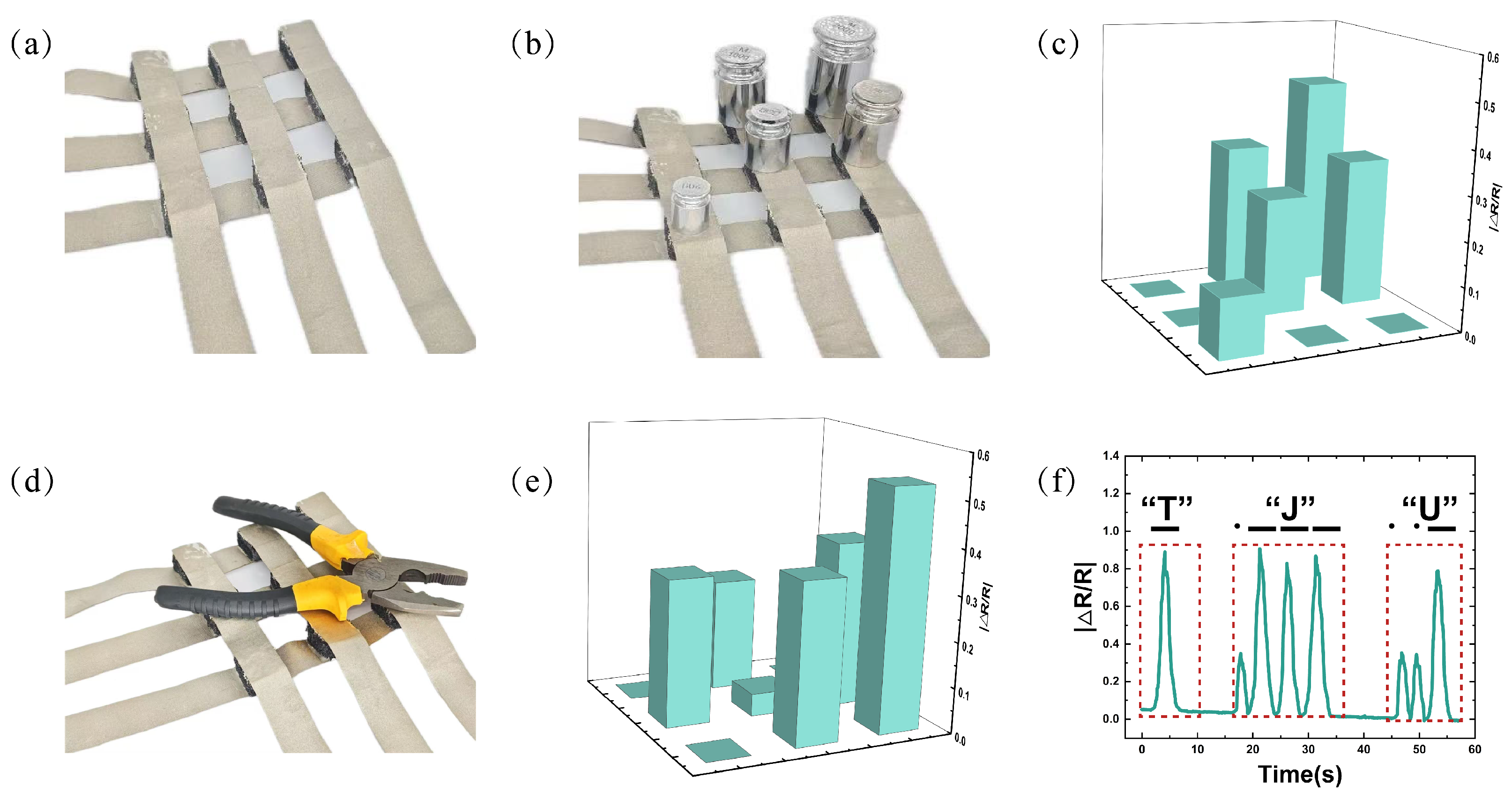
3.4. Application of BLPS Sensors
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.; Miao, L.; Xiao, Y.; Sun, P. Research Progress of Flexible Piezoresistive Pressure Sensor: A Review. IEEE Sens. J. 2024, 24, 31624–31644. [Google Scholar] [CrossRef]
- Han, S.; Li, S.; Fu, X.; Han, S.; Chen, H.; Zhang, L.; Wang, J.; Sun, G. Research progress of flexible piezoresistive sensors based on polymer porous materials. ACS Sens. 2024, 9, 3848–3863. [Google Scholar] [CrossRef]
- Tan, Y.; Liu, X.; Tang, W.; Chen, J.; Zhu, Z.; Li, L.; Zhou, N.; Kang, X.; Xu, D.; Wang, L.; et al. Flexible pressure sensors based on bionic microstructures: From plants to animals. Adv. Mater. Interfaces 2022, 9, 2101312. [Google Scholar] [CrossRef]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L.; Liu, R. Recent developments for flexible pressure sensors: A review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z.; Liu, Z.; Fu, J.; Shan, T.; Yang, X.; Lei, Q.; Yang, Y.; Li, D. Flexible capacitive pressure sensors for wearable electronics. J. Mater. Chem. C 2022, 10, 1594–1605. [Google Scholar] [CrossRef]
- Fan, S.; Meng, L.; Dan, L.; Zheng, W.; Wang, X. Polymer microelectromechanical system-integrated flexible sensors for wearable technologies. IEEE Sens. J. 2018, 19, 443–450. [Google Scholar] [CrossRef]
- Garcia, E.; Saied, A.; Hedayatipour, A. Smart Shoe Insole with Flexible Pressure and Temperature Sensor Using Additive Manufacturing. In Proceedings of the 2022 29th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Glasgow, UK, 24–26 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–3. [Google Scholar]
- Gao, Y.; Xiao, T.; Li, Q.; Chen, Y.; Qiu, X.; Liu, J.; Bian, Y.; Xuan, F. Flexible microstructured pressure sensors: Design, fabrication and applications. Nanotechnology 2022, 33, 322002. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Xu, Z.; Li, D.; Cui, T.; Li, X.; Yang, Y.; Liu, H.; Ren, T. Recent advances in flexible piezoresistive arrays: Materials, design, and applications. Polymers 2023, 15, 2699. [Google Scholar] [CrossRef]
- Pierre Claver, U.; Zhao, G. Recent progress in flexible pressure sensors based electronic skin. Adv. Eng. Mater. 2021, 23, 2001187. [Google Scholar] [CrossRef]
- Chen, W.; Yan, X. Progress in achieving high-performance piezoresistive and capacitive flexible pressure sensors: A review. J. Mater. Sci. Technol. 2020, 43, 175–188. [Google Scholar] [CrossRef]
- Dong, H.; Zhang, L.; Wu, T.; Song, H.; Luo, J.; Huang, F.; Zuo, C. Flexible pressure sensor with high sensitivity and fast response for electronic skin using near-field electrohydrodynamic direct writing. Org. Electron. 2021, 89, 106044. [Google Scholar] [CrossRef]
- Abodurexiti, A.; Yang, C.; Maimaitiyiming, X. High-performance flexible pressure and temperature sensors with complex leather structure. Macromol. Mater. Eng. 2020, 305, 2000181. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Yuan, J.; Yang, J.; Li, J.; Guo, C.F. A tutorial of characterization methods on flexible pressure sensors: Fundamental and applications. J. Phys. Appl. Phys. 2023, 57, 093002. [Google Scholar] [CrossRef]
- Li, J.; Fang, Z.; Wei, D.; Liu, Y. Flexible pressure, humidity, and temperature sensors for human health monitoring. Adv. Healthc. Mater. 2024, 13, 2401532. [Google Scholar] [CrossRef] [PubMed]
- Mishra, S.; Mohanty, S.; Ramadoss, A. Functionality of flexible pressure sensors in cardiovascular health monitoring: A review. ACS Sens. 2022, 7, 2495–2520. [Google Scholar] [CrossRef]
- Chang, S.; Li, J.; He, Y.; Liu, H.; Cheng, B. A high-sensitivity and low-hysteresis flexible pressure sensor based on carbonized cotton fabric. Sens. Actuators A Phys. 2019, 294, 45–53. [Google Scholar] [CrossRef]
- Shi, Z.; Meng, L.; Shi, X.; Li, H.; Zhang, J.; Sun, Q.; Liu, X.; Chen, J.; Liu, S. Morphological engineering of sensing materials for flexible pressure sensors and artificial intelligence applications. Nano-Micro Lett. 2022, 14, 141. [Google Scholar] [CrossRef]
- Huang, B.; Feng, J.; He, J.; Huang, W.; Huang, J.; Yang, S.; Duan, W.; Zhou, Z.; Zeng, Z.; Gui, X. High sensitivity and wide linear range flexible piezoresistive pressure sensor with microspheres as spacers for pronunciation recognition. ACS Appl. Mater. Interfaces 2024, 16, 19298–19308. [Google Scholar] [CrossRef]
- Lai, Q.T.; Sun, Q.J.; Tang, Z.; Tang, X.G.; Zhao, X.H. Conjugated polymer-based nanocomposites for pressure sensors. Molecules 2023, 28, 1627. [Google Scholar] [CrossRef]
- Li, W.; Liu, X.; Wang, Y.; Peng, L.; Jin, X.; Jiang, Z.; Guo, Z.; Chen, J.; Wang, W. Research on high sensitivity piezoresistive sensor based on structural design. Discov. Nano 2024, 19, 88. [Google Scholar] [CrossRef]
- Ma, M.; Sun, R.; Li, S.; Kang, H.; Wang, S.; Chu, F.; Sun, J. Fabricating of double layered flexible pressure sensor with a high-sensitivity based on inkjet printed micro-concave structure. Sens. Actuators A Phys. 2023, 351, 114161. [Google Scholar] [CrossRef]
- Qin, R.; Li, X.; Hu, M.; Shan, G.; Seeram, R.; Yin, M. Preparation of high-performance MXene/PVA-based flexible pressure sensors with adjustable sensitivity and sensing range. Sens. Actuators A Phys. 2022, 338, 113458. [Google Scholar] [CrossRef]
- Huang, H.; Shao, R.; Wang, C.; An, X.; Sun, Z.; Sun, S. Flexible, ultralight, ultrathin, and highly sensitive pressure sensors based on bacterial cellulose and silver nanowires. J. Mater. Sci. 2022, 57, 20987–20998. [Google Scholar] [CrossRef]
- Lee, J.; So, H. 3D-printing-assisted flexible pressure sensor with a concentric circle pattern and high sensitivity for health monitoring. Microsyst. Nanoeng. 2023, 9, 44. [Google Scholar] [CrossRef]
- Gu, Y.; Li, J.; Zheng, C.; Huang, J.; Chen, Z.D.; Zhang, T.; Li, S. A flexible pressure/bending bimodal sensor for hand movements monitoring. IEEE Sens. J. 2023, 23, 30241–30248. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, X.; Li, Y.; Zhang, K.; Huang, L. Plantar pressure monitoring system based on a flexible pressure sensor array for human walking feature recognition. IEEE Trans. Electron Devices 2023, 70, 6526–6533. [Google Scholar] [CrossRef]
- Qian, X.; Tian, B.; Zhang, J.; Fan, Z.; Ren, Y.; Pan, Y.; Guo, C.; Wang, C.; Kong, L.; Yu, H.; et al. An intelligent insole based on wide-range flexible pressure sensor. AIP Adv. 2024, 14. [Google Scholar] [CrossRef]
- Hu, J.; Dun, G.; Geng, X.; Chen, J.; Wu, X.; Ren, T.L. Recent progress in flexible micro-pressure sensors for wearable health monitoring. Nanoscale Adv. 2023, 5, 3131–3145. [Google Scholar] [CrossRef] [PubMed]
- Cheng, L.; Hao, X.; Liu, G.; Zhang, W.; Cui, J.; Zhang, G.; Yang, Y.; Wang, R. A flexible pressure sensor based on silicon nanomembrane. Biosensors 2023, 13, 131. [Google Scholar] [CrossRef]
- Qi, F.; Xu, L.; He, Y.; Yan, H.; Liu, H. PVDF-based flexible piezoelectric tactile sensors. Cryst. Res. Technol. 2023, 58, 2300119. [Google Scholar] [CrossRef]
- Lv, C.; Tian, C.; Jiang, J.; Dang, Y.; Liu, Y.; Duan, X.; Li, Q.; Chen, X.; Xie, M. Ultrasensitive linear capacitive pressure sensor with wrinkled microstructures for tactile perception. Adv. Sci. 2023, 10, 2206807. [Google Scholar] [CrossRef] [PubMed]
- Alonso Romero, A.; Amouzou, K.N.; Sengupta, D.; Zimmermann, C.A.; Richard-Denis, A.; Mac-Thiong, J.M.; Petit, Y.; Lina, J.M.; Ung, B. Optoelectronic pressure sensor based on the bending loss of plastic optical fibers embedded in stretchable polydimethylsiloxane. Sensors 2023, 23, 3322. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Wang, T.; Zhang, J.; He, Y.; Liu, H.; Zhang, S. Preparation and application of fabric-based interlocking microstructured flexible piezoresistive sensors. Sens. Actuators A Phys. 2023, 363, 114740. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, J.; Zhang, X.; Wei, A.; Luo, N.; He, Y.; Zhao, Y.; Liu, Z.; Xu, J. High-sensitivity and ultra-broad linear working region flexible piezoresistive pressure sensors based on PDMS/CNT/TPU. J. Alloys Compd. 2025, 1010, 177711. [Google Scholar] [CrossRef]
- Yu, H.; Wang, Z.; Li, C.; Ye, X.; Wu, Z.; Chen, Z.; Tu, J.; Pan, Y.; Ren, Q.; Huang, J.; et al. Flexible Resistive Pressure Sensors with High Sensitivity and Wide Detection Range. In Proceedings of the 2022 IEEE Sensors, Dallas, TX, USA, 30 October–2 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–4. [Google Scholar]
- Gong, T.; Jia, J.; Sun, X.R.; Li, W.D.; Ke, K.; Bao, R.Y.; Yang, W. Design strategy for hierarchical structure of carbon black on microporous elastomer surface toward stretchable and compressive strain sensors. Carbon 2023, 206, 53–61. [Google Scholar] [CrossRef]
- Yang, Y.F.; Yang, H.; Shang, J.C.; Zhao, W.H.; Yan, X.; Wan, Z.S.; Lei, H.S.; Chen, H.S. A high-sensitivity flexible PDMS@ rGO-based pressure sensor with ultra-wide working range based on bioinspired gradient hierarchical structure with coplanar electrodes. Compos. Sci. Technol. 2023, 240, 110078. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Sun, H.; Wang, Z. A high performance capacitive flexible pressure sensor based on three-dimensional porous rGO/PDMS composite. J. Mater. Sci. Mater. Electron. 2024, 35, 2210. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, D.Y.; Li, Y.T.; Tian, H.; Yang, Y.; Ren, T.L. Highly sensitive, wide-range, and flexible pressure sensor based on honeycomb-like graphene network. IEEE Trans. Electron Devices 2020, 67, 2153–2156. [Google Scholar] [CrossRef]
- Li, W.; Jin, X.; Han, X.; Li, Y.; Wang, W.; Lin, T.; Zhu, Z. Synergy of porous structure and microstructure in piezoresistive material for high-performance and flexible pressure sensors. ACS Appl. Mater. Interfaces 2021, 13, 19211–19220. [Google Scholar] [CrossRef]
- Chen, D.; Cai, Y.; Huang, M.C. Customizable pressure sensor array: Design and evaluation. IEEE Sens. J. 2018, 18, 6337–6344. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Zhao, Y.; Xue, T.; Wang, X.; Zou, Q. Flexible Pressure Sensor with Tunable Sensitivity and a Wide Sensing Range, Featuring a Bilayer Porous Structure. Micromachines 2025, 16, 461. https://doi.org/10.3390/mi16040461
Yin Y, Zhao Y, Xue T, Wang X, Zou Q. Flexible Pressure Sensor with Tunable Sensitivity and a Wide Sensing Range, Featuring a Bilayer Porous Structure. Micromachines. 2025; 16(4):461. https://doi.org/10.3390/mi16040461
Chicago/Turabian StyleYin, Yunjiang, Yingying Zhao, Tao Xue, Xinyi Wang, and Qiang Zou. 2025. "Flexible Pressure Sensor with Tunable Sensitivity and a Wide Sensing Range, Featuring a Bilayer Porous Structure" Micromachines 16, no. 4: 461. https://doi.org/10.3390/mi16040461
APA StyleYin, Y., Zhao, Y., Xue, T., Wang, X., & Zou, Q. (2025). Flexible Pressure Sensor with Tunable Sensitivity and a Wide Sensing Range, Featuring a Bilayer Porous Structure. Micromachines, 16(4), 461. https://doi.org/10.3390/mi16040461