
High-Sensitivity and Wide-Range Flexible Pressure Sensor Based on Gradient-Wrinkle Structures and AgNW-Coated PDMS


Abstract
:1. Introduction
2. Experimental Details
2.1. Fabrication Process of Gradient-Wrinkled AgNW-Coated PDMS Piezoresistive Sensors
2.2. Characterization
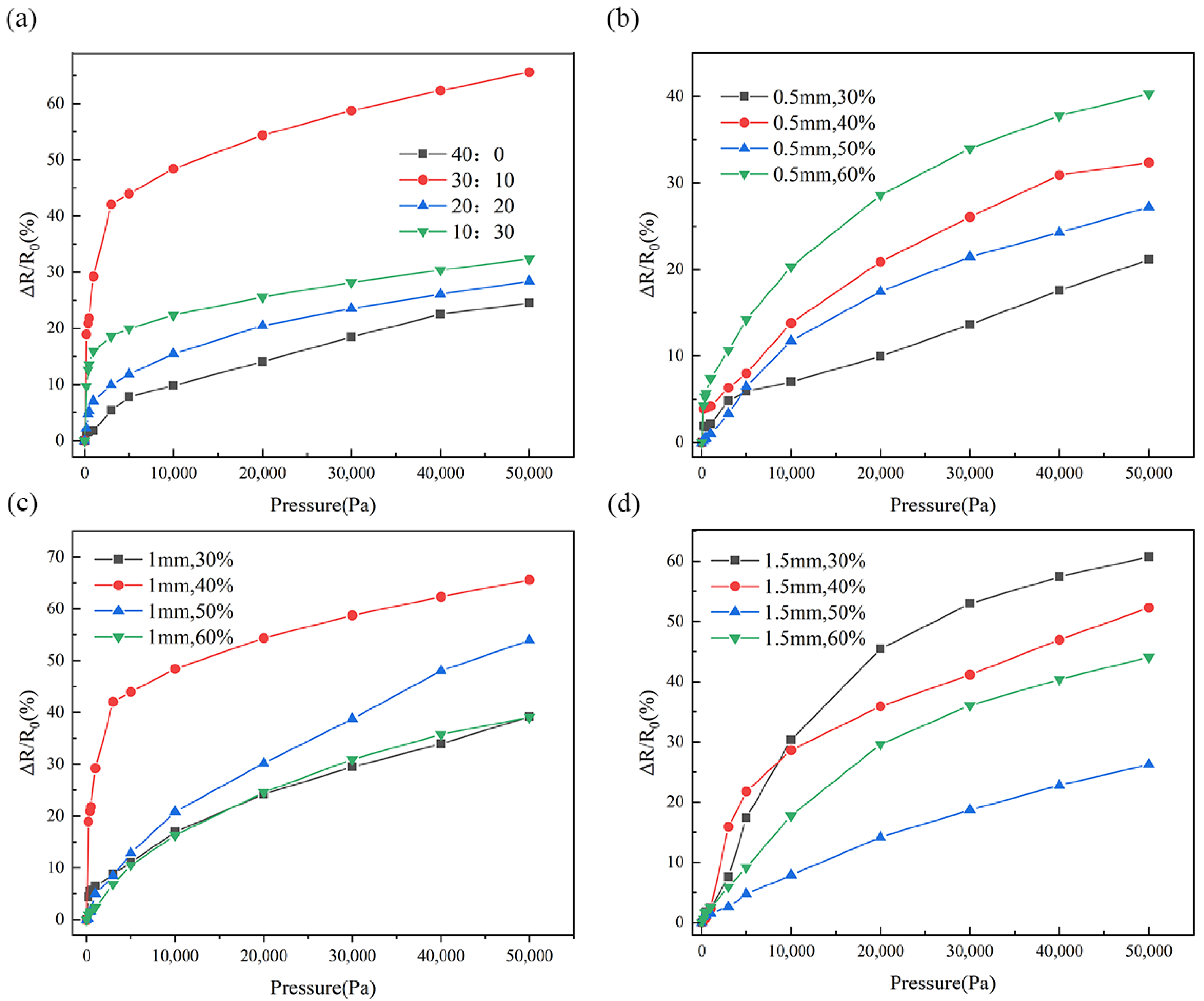
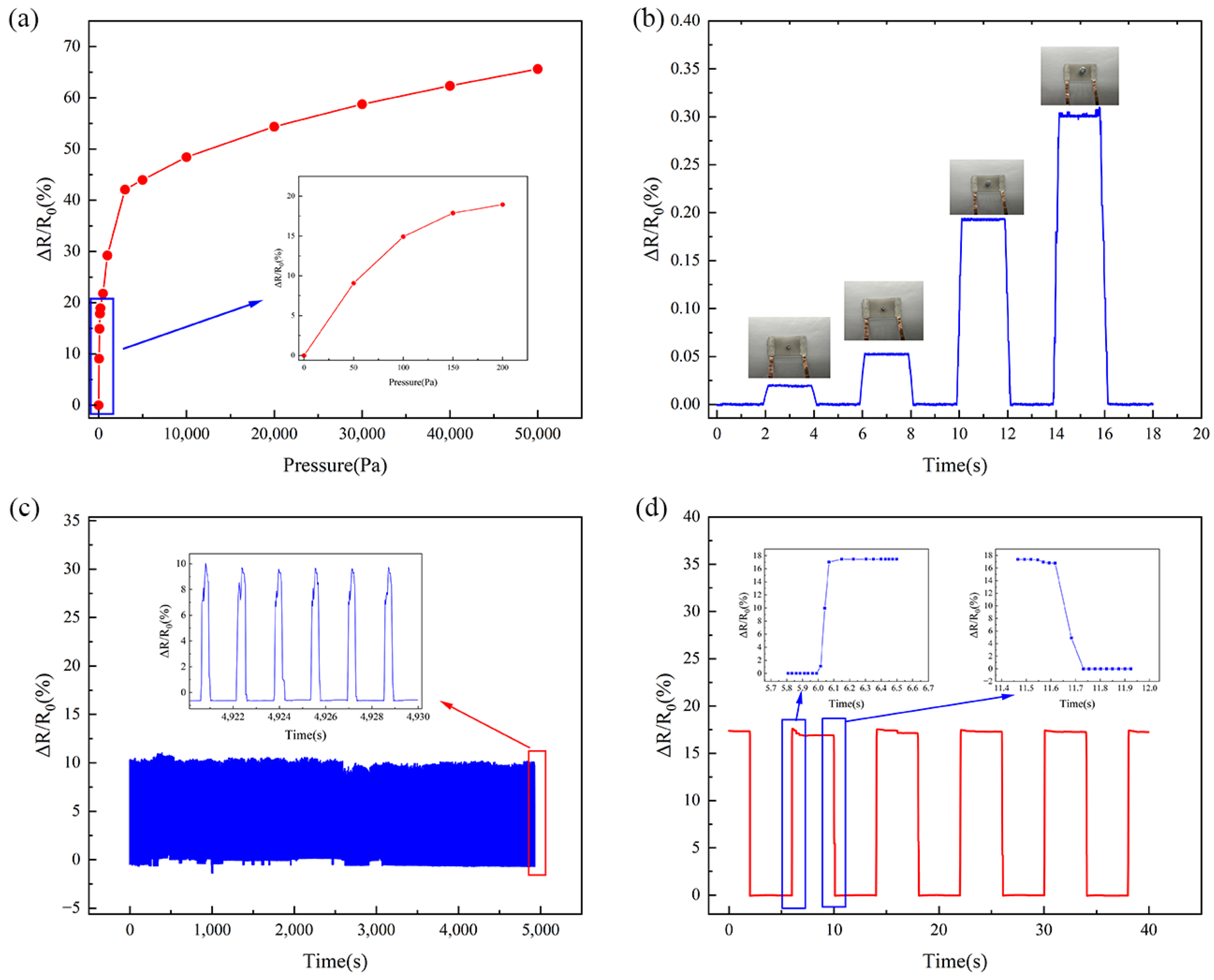
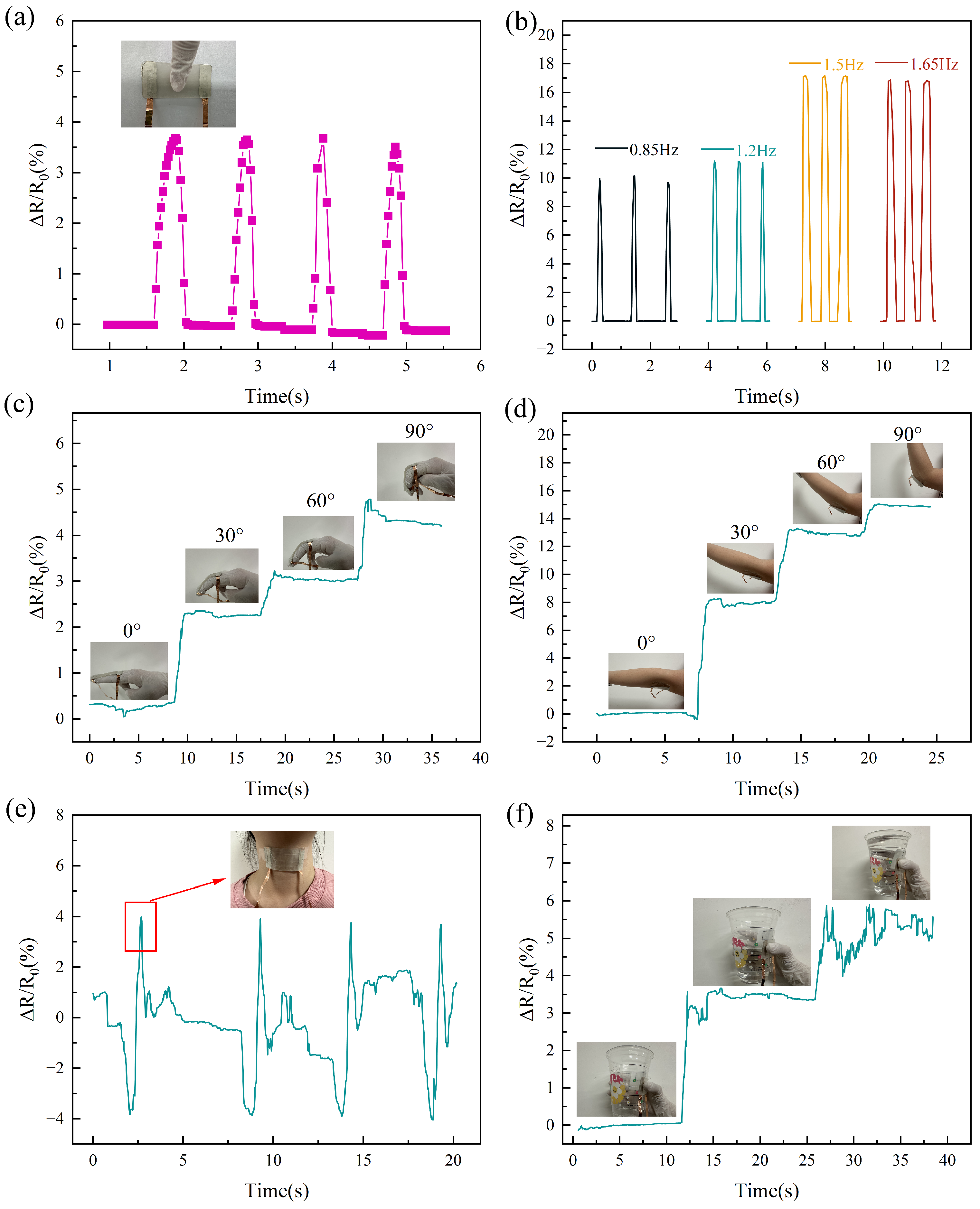
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hozumi, S.; Honda, S.; Arie, T.; Akita, S.; Takei, K. Multimodal wearable sensor sheet for health-related chemical and physical monitoring. ACS Sens. 2021, 6, 1918–1924. [Google Scholar] [CrossRef]
- Yin, T.; Cheng, Y.; Hou, Y.; Sun, L.; Ma, Y.; Su, J.; Zhang, Z.; Liu, N.; Li, L.; Gao, Y. 3D Porous Structure in MXene/PANI Foam for a High-Performance Flexible Pressure Sensor. Small 2022, 18, 2204806. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Miao, J.; Fan, Q.; Zhang, W.; Zuo, X.; Tian, M.; Zhu, S.; Zhang, X.; Qu, L. Recent progress on smart fiber and textile based wearable strain sensors: Materials, fabrications and applications. Adv. Fiber Mater. 2022, 4, 361–389. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C.; Lee, Y.J.; DelPreto, J.; Wu, K.; Foshey, M.; Rus, D.; Palacios, T.; Li, Y.; Torralba, A.; et al. Adaptive tactile interaction transfer via digitally embroidered smart gloves. Nat. Commun. 2024, 15, 868. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, D.; Zhang, R.; Zhang, J.; Zhao, Q.; He, H.; Huang, H.; Yang, L.; Xu, Y. Novel polyurethane based, fully flexible, high-performance piezoresistive sensor for real-time pressure monitoring. ACS Appl. Mater. Interfaces 2024, 16, 25422–25431. [Google Scholar] [CrossRef]
- Yang, W.; Liu, Y.; Xu, W.; Nie, H.Y. Design and fabrication of flexible capacitive sensor with cellular structured dielectric layer via 3D printing. IEEE Sens. J. 2021, 21, 10473–10482. [Google Scholar] [CrossRef]
- He, W.; Dai, Z.; Zou, K.; Li, X.; Hao, S.; Wang, H. Flexible piezoelectric PVDF nanofiber film sensor by blow spinning. Sci. China Technol. Sci. 2023, 66, 863–868. [Google Scholar] [CrossRef]
- Wang, Y.; Yue, Y.; Cheng, F.; Cheng, Y.; Ge, B.; Liu, N.; Gao, Y. Ti3C2T × MXene-based flexible piezoresistive physical sensors. ACS Nano 2022, 16, 1734–1758. [Google Scholar] [CrossRef]
- Jing, M.; Zhou, J.; Zhang, P.; Hou, D.; Shen, J.; Tian, J.; Chen, W. Porous AgNWs/poly (vinylidene fluoride) composite-based flexible piezoresistive sensor with high sensitivity and wide pressure ranges. ACS Appl. Mater. Interfaces 2022, 14, 55119–55129. [Google Scholar] [CrossRef]
- Du, D.; Ma, X.; An, W.; Yu, S. Flexible piezoresistive pressure sensor based on wrinkled layers with fast response for wearable applications. Measurement 2022, 201, 111645. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, Q.; Wang, Y.; Zhang, W.; Liu, J.; Xu, D.; Xia, X.; Hu, S.; Bian, B.; Zhao, Y.; et al. 3D printing wide detection range and high sensitivity flexible pressure sensor and its applications. React. Funct. Polym. 2024, 196, 105840. [Google Scholar] [CrossRef]
- Li, R.; Zhou, Q.; Bi, Y.; Cao, S.; Xia, X.; Yang, A.; Li, S.; Xiao, X. Research progress of flexible capacitive pressure sensor for sensitivity enhancement approaches. Sens. Actuators A Phys. 2021, 321, 112425. [Google Scholar] [CrossRef]
- Tian, H.; Jiang, Y.; Song, Y.; Wang, T.; Xue, J.; Zhang, F.; Liu, Y.; Xue, Z.; Wang, K.; Zhao, Y. Hierarchical Synergetic Strategy for Iontronic Pressure Sensors with High Sensitivity and Broad Linearity Range. ACS Sens. 2025, 10, 2030–2037. [Google Scholar] [CrossRef]
- Li, G.; Chen, D.; Li, C.; Liu, W.; Liu, H. Engineered microstructure derived hierarchical deformation of flexible pressure sensor induces a supersensitive piezoresistive property in broad pressure range. Adv. Sci. 2020, 7, 2000154. [Google Scholar] [CrossRef] [PubMed]
- Cui, X.; Jiang, Y.; Hu, L.; Cao, M.; Xie, H.; Zhang, X.; Huang, F.; Xu, Z.; Zhu, Y. Synergistically microstructured flexible pressure sensors with high sensitivity and ultrawide linear range for full-range human physiological monitoring. Adv. Mater. Technol. 2023, 8, 2200609. [Google Scholar] [CrossRef]
- Zhang, N.; Zong, X.; Ma, X.; Wang, J.; Zhang, C. A double-layer flexible pressure sensor with high performances based on etched hierarchical microstructures and serpentine electrodes. Surfaces Interfaces 2024, 51, 104798. [Google Scholar] [CrossRef]
- Li, S.; Cui, X.; Yang, Y. Oblique pyramid microstructure-patterned flexible sensors for pressure and visual temperature sensing. ACS Appl. Mater. Interfaces 2023, 15, 59760–59767. [Google Scholar] [CrossRef]
- Lan, R.; Zhang, J.; Chen, J.; Tang, W.; Wu, Q.; Zhou, X.; Kang, X.; Wang, J.; Wang, H.; Li, H. High-sensitivity flexible capacitive pressure sensors based on biomimetic hibiscus flower microstructures. ACS Omega 2024, 9, 13704–13713. [Google Scholar] [CrossRef]
- Zhang, P.; Ang, L.; Li, Y.; Guo, C.; Zhang, Y. Biomimetic Wearable Flexible Pressure Sensor with Multi-level Microstructured Piezoresistive Layer. IEEE Sens. J. 2024, 24, 16744–16751. [Google Scholar] [CrossRef]
- He, J.; Wang, S.; Han, R.; Liu, Y.; Gao, W.; Bao, R.; Pan, C. Wide Detection Range Flexible Pressure Sensors Based on 3D Interlocking Structure TPU/ZnO NWs. Adv. Funct. Mater. 2024, 2418791. [Google Scholar] [CrossRef]
- Fan, L.; Wang, Z.; Yang, T.; Zhao, Q.; Wu, Z.; Wang, Y.; Qi, X.; Zhang, L. A Wide-Range, Highly Stable Intelligent Flexible Pressure Sensor Based on Micro-Wrinkled SWCNT/rGO-PDMS with Efficient Thermal Shrinkage. Biosensors 2025, 15, 122. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Yang, W.; Yin, S.; Tai, G.; Su, M.; Yang, J.; Shi, H.; Wei, D.; Yang, J. Controllable graphene wrinkle for a high-performance flexible pressure sensor. ACS Appl. Mater. Interfaces 2021, 13, 20448–20458. [Google Scholar] [CrossRef]
- Lv, Y.; Min, L.; Niu, F.; Chen, X.; Zhao, B.; Liu, Y.; Pan, K. Wrinkle-structured MXene film assists flexible pressure sensors with superhigh sensitivity and ultrawide detection range. Nanocomposites 2022, 8, 81–94. [Google Scholar] [CrossRef]
- Lv, C.; Tian, C.; Jiang, J.; Dang, Y.; Liu, Y.; Duan, X.; Li, Q.; Chen, X.; Xie, M. Ultrasensitive linear capacitive pressure sensor with wrinkled microstructures for tactile perception. Adv. Sci. 2023, 10, 2206807. [Google Scholar] [CrossRef]
- Cai, Y.W.; Zhang, X.N.; Wang, G.G.; Li, G.Z.; Zhao, D.Q.; Sun, N.; Li, F.; Zhang, H.Y.; Han, J.C.; Yang, Y. A flexible ultra-sensitive triboelectric tactile sensor of wrinkled PDMS/MXene composite films for E-skin. Nano Energy 2021, 81, 105663. [Google Scholar] [CrossRef]
- Pandey, P.; Vongphachanh, S.; Yoon, J.; Kim, B.; Choi, C.J.; Sohn, J.I.; Hong, W.K. Silver nanowire-network-film-coated soft substrates with wrinkled surfaces for use as stretchable surface enhanced Raman scattering sensors. J. Alloy Compd. 2021, 859, 157862. [Google Scholar] [CrossRef]
- Hwang, J.H.; Hong, J.S.; Oh, C.W.; Joe, M.J.; Jeong, H.C.; Park, H.G. Soft imprint lithography for liquid crystal alignment using a wrinkled UVO-treated PDMS transferring method. J. Mol. Liq. 2021, 323, 115150. [Google Scholar] [CrossRef]
- Cho, C.; Kim, D.; Lee, C.; Oh, J.H. Ultrasensitive ionic liquid polymer composites with a convex and wrinkled microstructure and their application as wearable pressure sensors. ACS Appl. Mater. Interfaces 2023, 15, 13625–13636. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Hu, K.; Ma, X.; Zhang, W.; Yin, J.; Jiang, X. Hierarchical 3D patterns with dynamic wrinkles produced by a photocontrolled diels–alder reaction on the surface. Adv. Mater. 2020, 32, 1906712. [Google Scholar] [CrossRef]
- Ritanjali, S.R.; Bhandaru, N.; Mukherjee, R. Influence of Initial Film Properties in UVO-Mediated Patterning of an Elastomeric Film Using a TEM Grid. Langmuir 2024, 40, 17889–17896. [Google Scholar] [CrossRef]
- Chu, Z.; Jiao, W.; Huang, Y.; Zheng, Y.; Wang, R.; He, X. Superhydrophobic gradient wrinkle strain sensor with ultra-high sensitivity and broad strain range for motion monitoring. J. Mater. Chem. A 2021, 9, 9634–9643. [Google Scholar] [CrossRef]
- Chu, Z.; Jiao, W.; Li, J.; Guo, H.; Zheng, Y.; Wang, R.; He, X. A novel wrinkle-gradient strain sensor with anti-water interference and high sensing performance. Chem. Eng. J. 2021, 421, 129873. [Google Scholar] [CrossRef]
- Lv, Y.; Zhang, M.; Zhao, B.; Qin, Z.; Chen, K.; Liu, Y.; Pan, K. Flexible laser-reduced graphene with gradient-wrinkled microstructures for piezoresistive pressure sensors. ACS Appl. Nano Mater. 2024, 7, 18986–18994. [Google Scholar] [CrossRef]
- Guo, H.; Chu, Z.; Fu, L.; Lv, Y.; Liu, X.; Fan, X.; Zhang, W. Thickness-induced gradient micro-wrinkle PDMS/MXene/rGO wearable strain sensor with high sensitivity and stretchability for human motion detection. Chem. Eng. J. 2024, 495, 153684. [Google Scholar] [CrossRef]
- Jia, J.; Huang, G.; Deng, J.; Pan, K. Skin-inspired flexible and high-sensitivity pressure sensors based on rGO films with continuous-gradient wrinkles. Nanoscale 2019, 11, 4258–4266. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Yuan, H.; Li, S.; Zhang, J.; Liu, G.; Sun, J. Two-stage wrinkling of Al films deposited on polymer substrates. Scr. Mater. 2019, 162, 456–459. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, F.; Li, G.; Xiang, J.; Zhong, Y.; Zhao, H.; Chen, T.; Li, G. Stretchable and flexible PEDOT: PSS/SWCNTs/PEO film with strain-insensitive electrical resistance. Polym. Compos. 2025. [Google Scholar] [CrossRef]
- Wang, Y.; Zhai, J.; Duan, A.; Yang, S.; Chen, L.; Wang, Z.; Song, J. A highly sensitive flexible pressure sensor based on nanoarchitectonics with biomimetic petal structure. Appl. Phys. A 2025, 131, 256. [Google Scholar] [CrossRef]
- Zhang, D.; Xie, J.; Meng, X.; Pang, H.; Sun, R.; Fan, H.; Nan, X.; Zhou, Z. Development of piezoresistive flexible sensor with dual-height cylindrical microstructure surfaces to achieve vehicle vibration monitoring. J. Micromech. Microeng. 2024, 34, 075005. [Google Scholar] [CrossRef]
- Chang, B.; Zhu, L.; Xu, P. A study on the mechanism and performance of capacitive flexible pressure sensors based on the coupling of MWCNTs and dielectric structures. Sens. Actuators A Phys. 2025, 383, 116220. [Google Scholar] [CrossRef]
- Li, Z.; Guan, T.; Zhang, W.; Liu, J.; Xiang, Z.; Gao, Z.; He, J.; Ding, J.; Bian, B.; Yi, X.; et al. Highly sensitive pressure sensor based on elastic conductive microspheres. Sensors 2024, 24, 1640. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Type | Microstructure | Sensitivity (kPa) | Response Time /Recovery Time (ms) | Cyclic Stability | Detection Limit |
|---|---|---|---|---|---|---|
| ZnO/PDMS [38] | Capacitive | Bionic petal | 0.28 | 100 | 1000 | 0–10 kPa |
| MWCNTs-COOH/PDMS [39] | Piezoresistive | Cylindrical | 1.774 | - | 1000 | 0–0.5 kPa |
| MWCNT/PDMS [40] | Capacitive | Hemispherical | 1.99 | 249/83 | 900 | 0–90 kPa |
| SWCNT/PDMS [41] | Piezoresistive | Hemispherical | 2.6 | 56/100 | 500 | 0–7 kPa |
| AgNWs/PDMS [This study] | Piezoresistive | Gradient wrinkle | 0.947 | 80/115 | 3000 | 0–50 kPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wang, X.; Xue, T.; Zhao, Y.; Zou, Q. High-Sensitivity and Wide-Range Flexible Pressure Sensor Based on Gradient-Wrinkle Structures and AgNW-Coated PDMS. Micromachines 2025, 16, 468. https://doi.org/10.3390/mi16040468
Liu X, Wang X, Xue T, Zhao Y, Zou Q. High-Sensitivity and Wide-Range Flexible Pressure Sensor Based on Gradient-Wrinkle Structures and AgNW-Coated PDMS. Micromachines. 2025; 16(4):468. https://doi.org/10.3390/mi16040468
Chicago/Turabian StyleLiu, Xiaoran, Xinyi Wang, Tao Xue, Yingying Zhao, and Qiang Zou. 2025. "High-Sensitivity and Wide-Range Flexible Pressure Sensor Based on Gradient-Wrinkle Structures and AgNW-Coated PDMS" Micromachines 16, no. 4: 468. https://doi.org/10.3390/mi16040468
APA StyleLiu, X., Wang, X., Xue, T., Zhao, Y., & Zou, Q. (2025). High-Sensitivity and Wide-Range Flexible Pressure Sensor Based on Gradient-Wrinkle Structures and AgNW-Coated PDMS. Micromachines, 16(4), 468. https://doi.org/10.3390/mi16040468