Performance Characterization of Micromachined Inductive Suspensions Based on 3D Wire-Bonded Microcoils


Abstract
:
1. Introduction
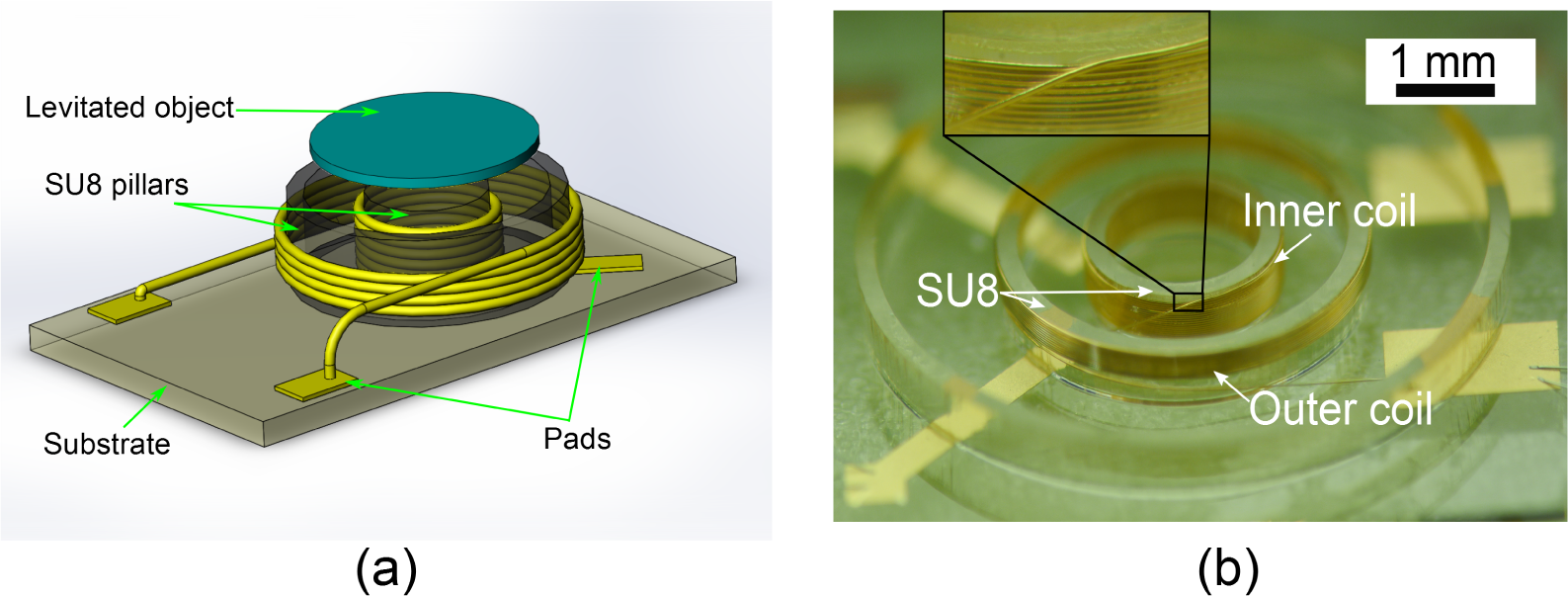
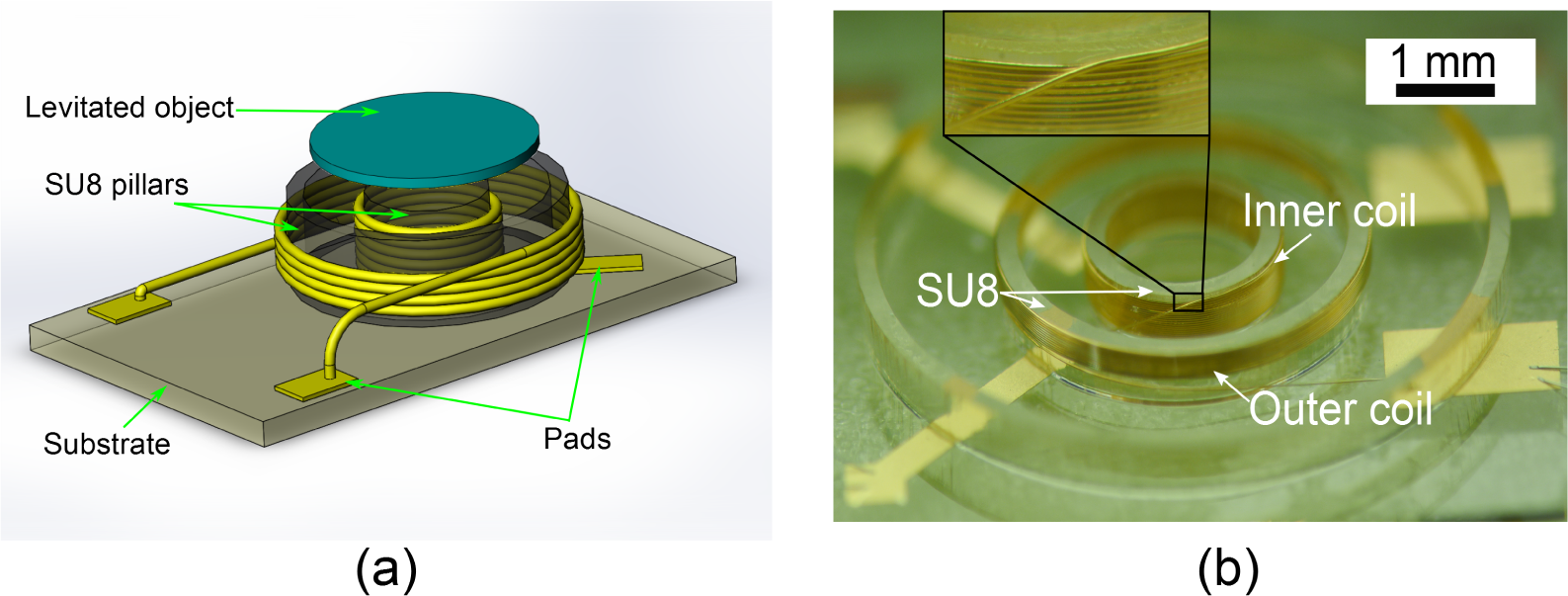
2. Mechanism and Design
2.1. Operating Principle
2.2. Coil Impedance and Design
3. Characterization
3.1. Experimental Setup
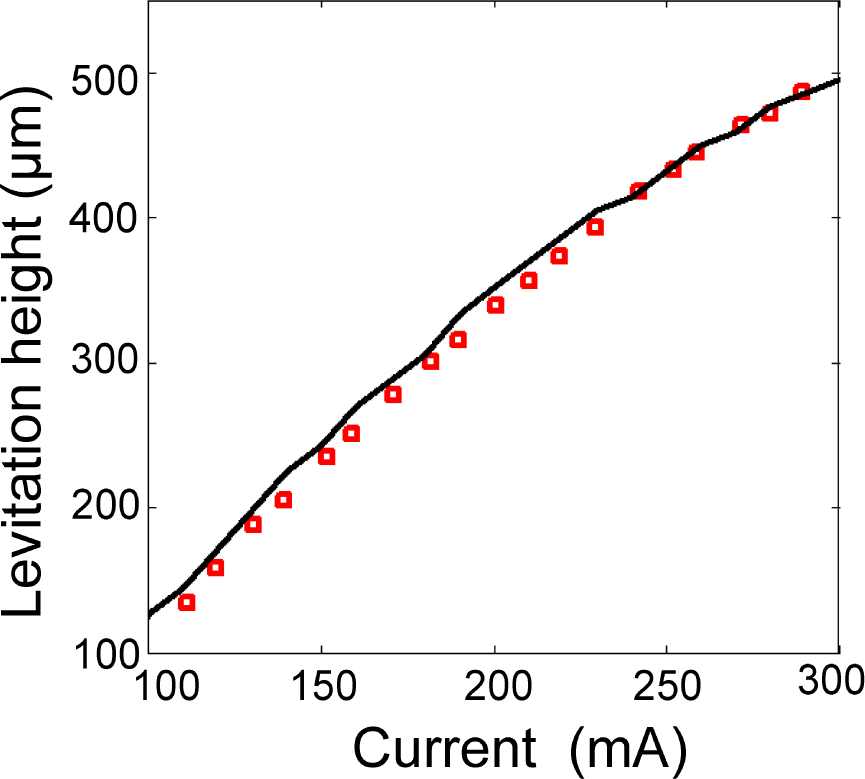
3.2. Control of Levitation Height
3.2.1. Levitation Height vs. Excitation Signal: Experimental
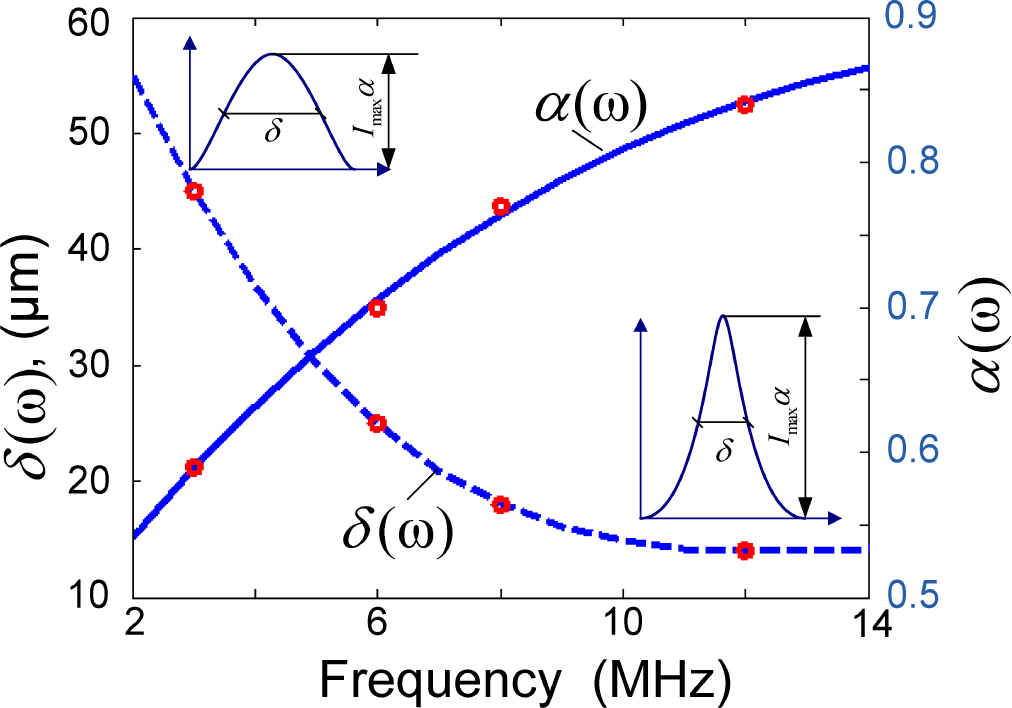
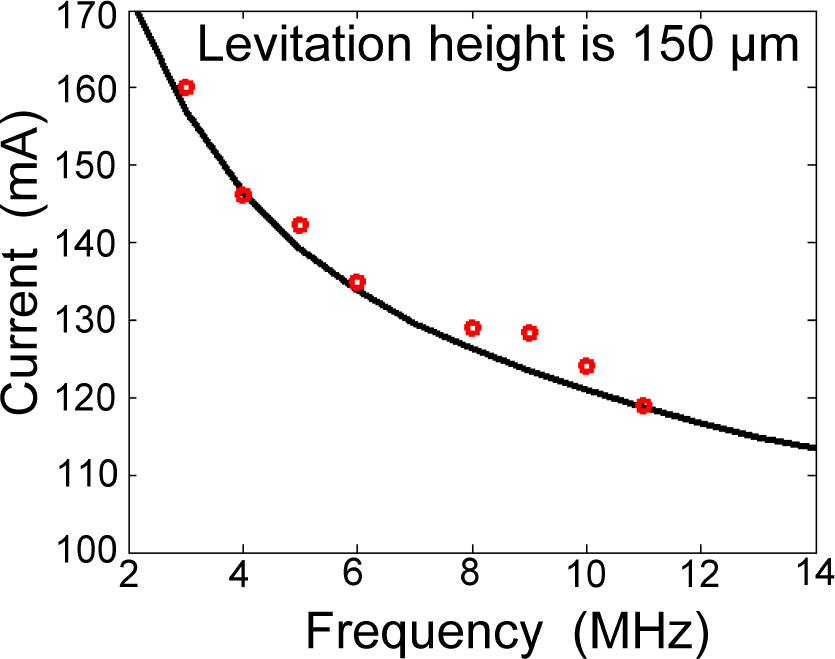
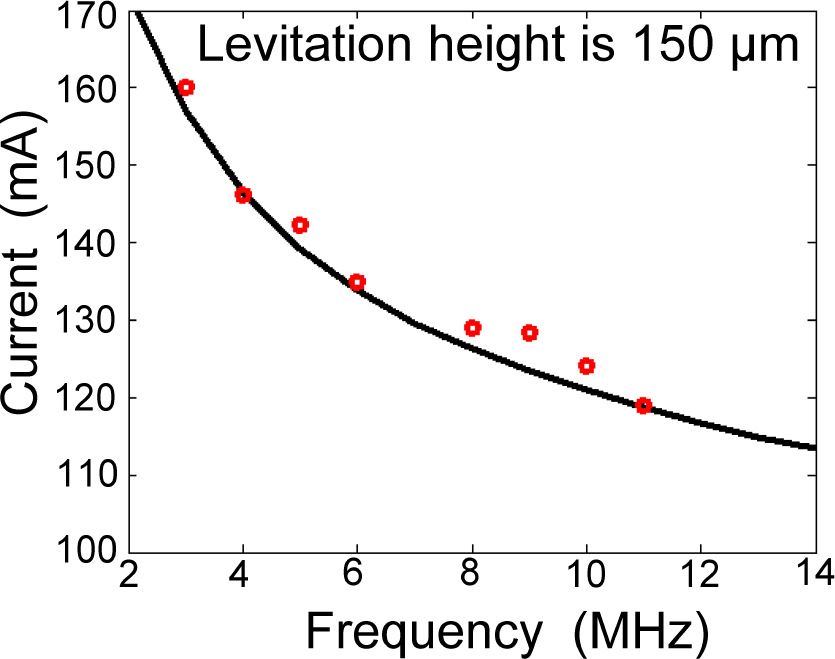
3.2.2. Theoretical Calculation of the Input Current and Frequency
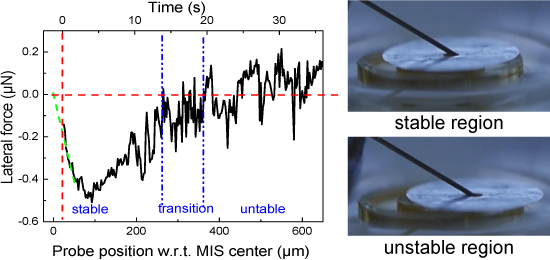
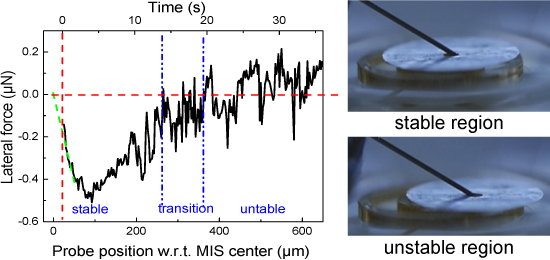
3.3. Lateral Stability
3.4. Temperature
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Souza, G.R.; Molina, J.R.; Raphael, R.M.; Ozawa, M.G.; Stark, D.J.; Levin, C.S.; Bronk, L.F.; Ananta, J.S.; Mandelin, J.; Georgescu, M.M. Three-dimensional tissue culture based on magnetic cell levitation. Nat. Nanotechnol 2010, 5, 291–296. [Google Scholar]
- Khamesee, M.B.; Kato, N.; Nomura, Y.; Nakamura, T. Design and control of a microrobotic system using magnetic levitation. IEEE/ASME Trans. Mechatron 2002, 7, 1–14. [Google Scholar]
- Zhang, W.; Chen, W.; Zhao, X.; Wu, X.; Liu, W.; Huang, X.; Shao, S. The study of an electromagnetic levitating micromotor for application in a rotating gyroscope. Sens. Actuators A 2006, 132, 651–657. [Google Scholar]
- Walther, A.; Givord, D.; Dempsey, N.; Khlopkov, K.; Gutfleisch, O. Structural, magnetic, and mechanical properties of 5 μ m thick SmCo films suitable for use in microelectromechanical systems. J. Appl. Phys 2008, 103. [Google Scholar] [CrossRef]
- Moazenzadeh, A.; Spengler, N.; Wallrabe, U. High-performance, 3D-microtransformers on multilayered magnetic cores, Proceedings of 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 287–290.
- Oniku, O.D.; Bowers, B.J.; Shetye, S.B.; Wang, N.; Arnold, D.P. Permanent magnet microstructures using dry-pressed magnetic powders. J. Micromech. Microeng 2013, 23, 075027. [Google Scholar]
- Shearwood, C.; Williams, C.; Mellor, P.; Yates, R.; Gibbs, M.; Mattingley, A. Levitation of a micromachined rotor for application in a rotating gyroscope. Electron. Lett 1995, 31, 1845–1846. [Google Scholar]
- Shearwood, C.; Ho, K.; Williams, C.; Gong, H. Development of a levitated micromotor for application as a gyroscope. Sens. Actuators A Phys 2000, 83, 85–92. [Google Scholar]
- Wu, X.; Chen, W.; Zhao, X.; Zhang, W. Development of a micromachined rotating gyroscope with electromagnetically levitated rotor. J. Micromech. Microeng 2006, 16, 1993. [Google Scholar]
- Sari, I.; Kraft, M. A MEMS Linear Accelerator for Levitated Micro-objects. Sens. Actuators A Phys 2014. [Google Scholar] [CrossRef]
- Badilita, V.; Rzesnik, S.; Kratt, K.; Wallrabe, U. Characterization of the 2nd generation magnetic microbearing with integrated stabilization for frictionless devices, Proceedings of 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS), Beijing, China, 5–9 June 2011; pp. 1456–1459.
- Lu, Z.; Jia, F.; Korvink, J.; Wallrabe, U.; Badilita, V. Design optimization of an electromangetic microlevitation system based on copper wirebonded coils, Proceddings of PowerMEMS 2012, Atlanta, GA, USA, 2–5 December 2012; pp. 363–366.
- Lu, Z.; Poletkin, K.; den Hartogh, B.; Wallrabe, U.; Badilita, V. 3D micro-machined inductive contactless suspension: Testing and modeling. Sens. Actuators A Phys 2014, 220, 134–143. [Google Scholar]
- Kratt, K.; Badilita, V.; Burger, T.; Korvink, J.; Wallrabe, U. A fully MEMS-compatible process for 3D high aspect ratio micro coils obtained with an automatic wire bonder. J. Micromech. Microeng 2010, 20, 015021. [Google Scholar]
- Lee, T.H. The Design of CMOS Radio-Frequency Integrated Circuits; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Fawzi, T.; Burke, P. The accurate computation of self and mutual inductances of circular coils. IEEE Trans. Power Appar. Syst 1978, PAS-97. 464–468. [Google Scholar]
- Yang, Z.; Wang, G.; Liu, W. Analytical calculation of the self-resonant frequency of biomedical telemetry coils, Proceedings of 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August 2–3 September 2006; pp. 5880–5883.
- Sari, I.; Kraft, M. A micro electrostatic linear accelerator based on electromagnetic levitation, Proceedings of 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS), Beijing, China, 5–9 June 2011; pp. 1729–1732.
- Poletkin, K.; Chernomorsky, A.I.; Shearwood, C.; Wallrabe, U. An analytical model of micromachined electromagnetic inductive contactless suspension, Proceedings of ASME 2013 International Mechanical Engineering Congress and Exposition, San Diego, CA, USA, 15–21 November 2013.
- Poletkin, K.; Chernomorsky, A.; Shearwood, C.; Wallrabe, U. A qualitative analysis of designs of micromachined electromagnetic inductive contactless suspension. Int. J. Mech. Sci 2014, 82, 110–121. [Google Scholar]
- Krakowski, M. Eddy-current losses in thin circular and rectangular plates. Electr. Eng 1982, 64, 307–311. [Google Scholar]
- Williams, C.; Shearwood, C.; Mellor, P.; Yates, R. Modelling and testing of a frictionless levitated micromotor. Sens. Actuators A Phys 1997, 61, 469–473. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency, MHz | 3 | 6 | 8 | 12 |
|---|---|---|---|---|
| α | 0.59 | 0.7 | 0.77 | 0.84 |
| δ, μm | 45 | 25 | 18 | 14 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Poletkin, K.; Wallrabe, U.; Badilita, V. Performance Characterization of Micromachined Inductive Suspensions Based on 3D Wire-Bonded Microcoils. Micromachines 2014, 5, 1469-1484. https://doi.org/10.3390/mi5041469
Lu Z, Poletkin K, Wallrabe U, Badilita V. Performance Characterization of Micromachined Inductive Suspensions Based on 3D Wire-Bonded Microcoils. Micromachines. 2014; 5(4):1469-1484. https://doi.org/10.3390/mi5041469
Chicago/Turabian StyleLu, Zhiqiu, Kirill Poletkin, Ulrike Wallrabe, and Vlad Badilita. 2014. "Performance Characterization of Micromachined Inductive Suspensions Based on 3D Wire-Bonded Microcoils" Micromachines 5, no. 4: 1469-1484. https://doi.org/10.3390/mi5041469
APA StyleLu, Z., Poletkin, K., Wallrabe, U., & Badilita, V. (2014). Performance Characterization of Micromachined Inductive Suspensions Based on 3D Wire-Bonded Microcoils. Micromachines, 5(4), 1469-1484. https://doi.org/10.3390/mi5041469