


Vehicle Auto-Classification Using Machine Learning Algorithms Based on Seismic Fingerprinting





Abstract
:1. Introduction
2. Materials and Methods
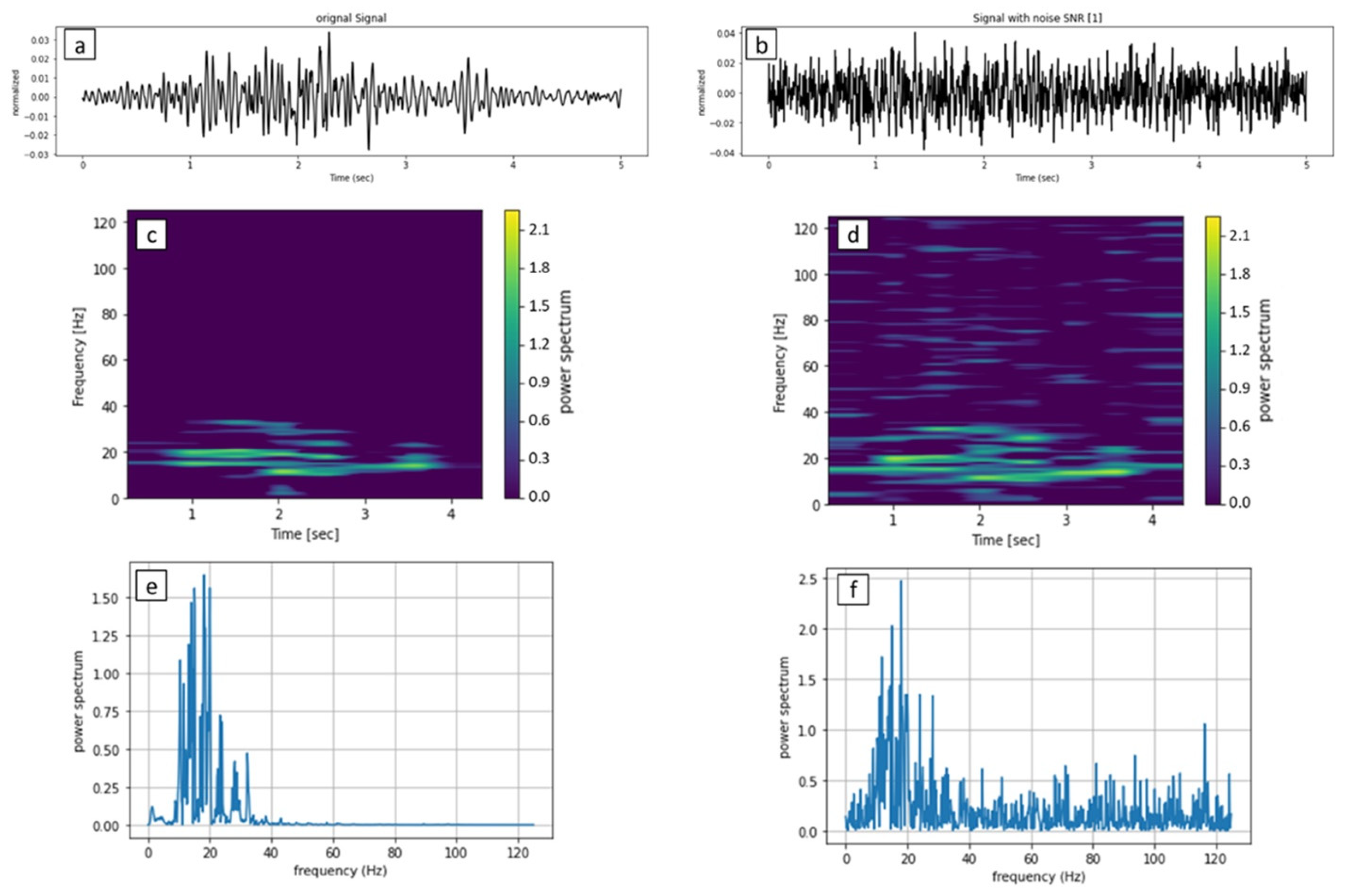
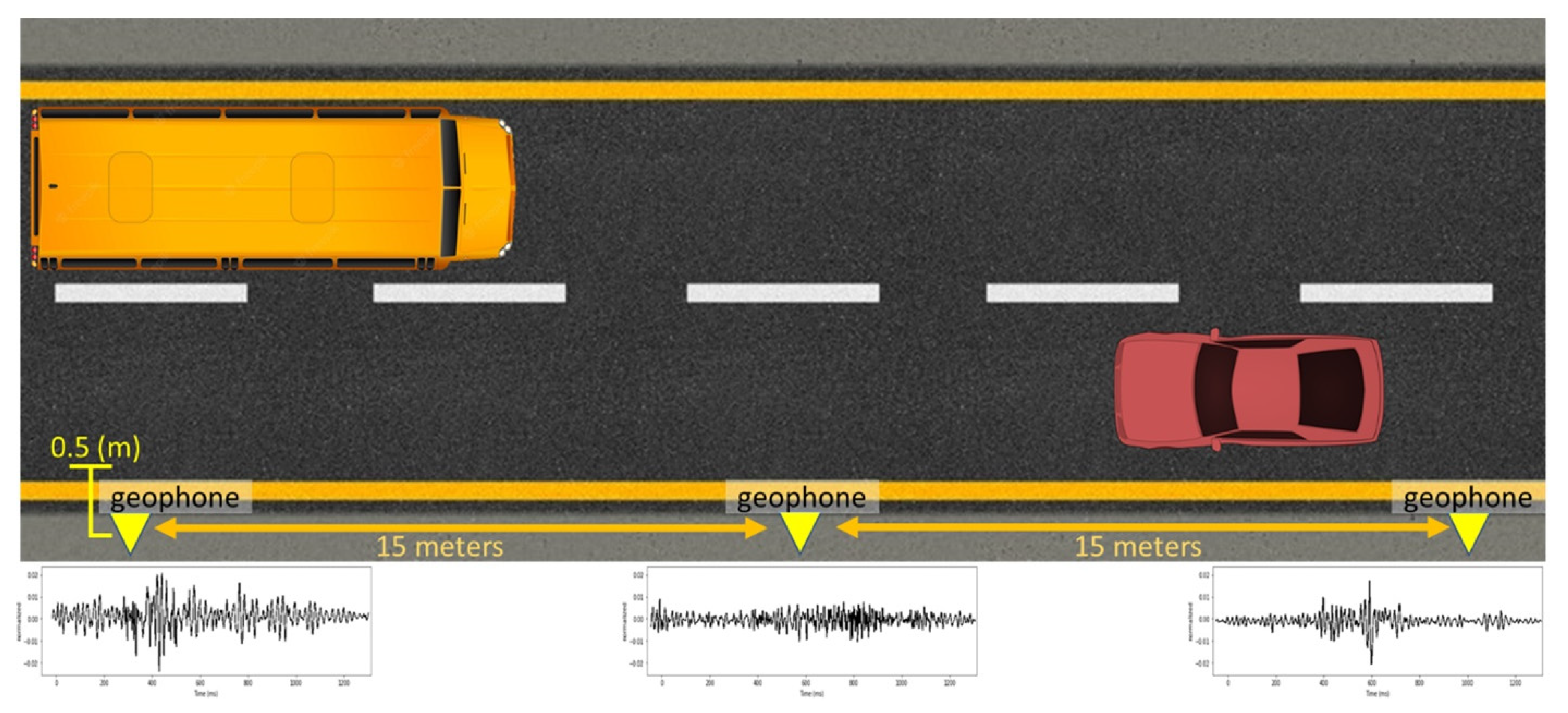
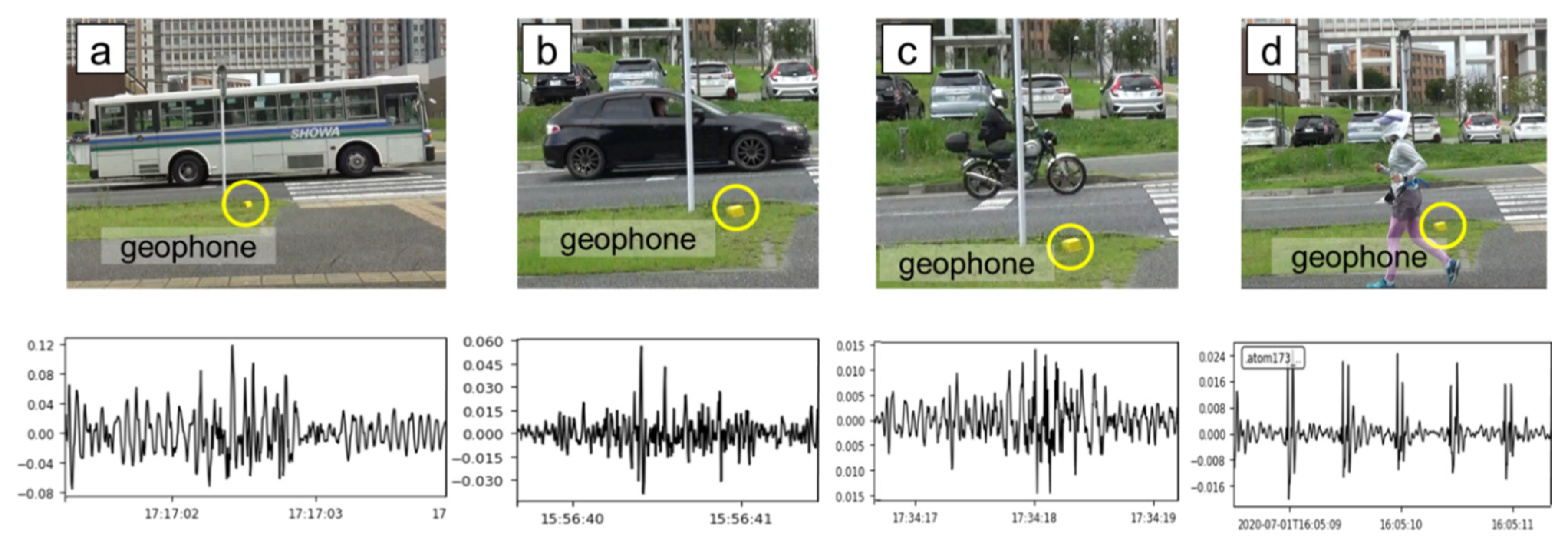
2.1. Data Set
2.2. Training Data Augmentation
2.3. Machine Learning Schemes
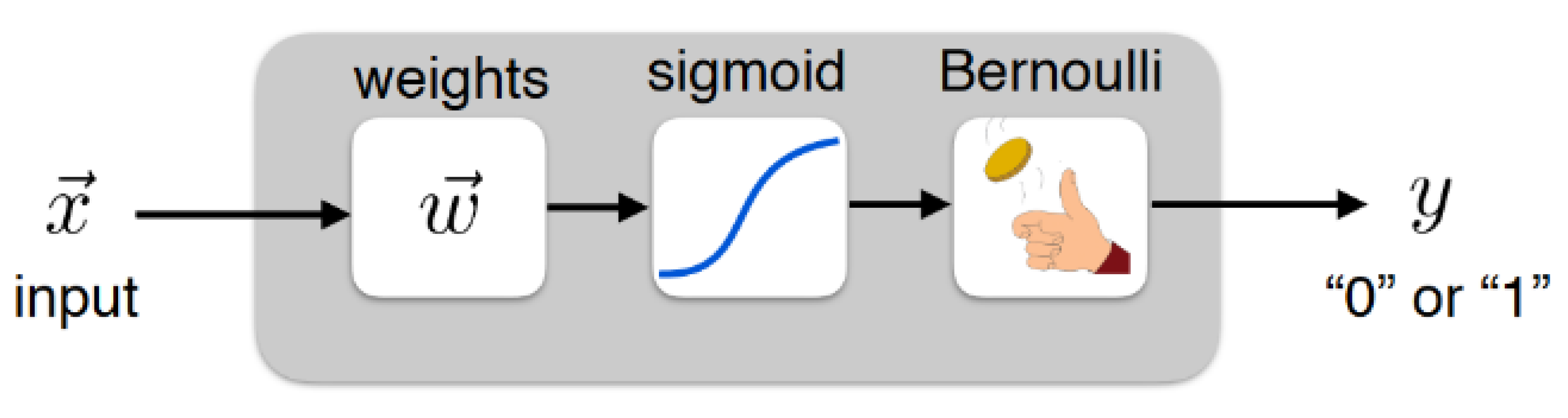
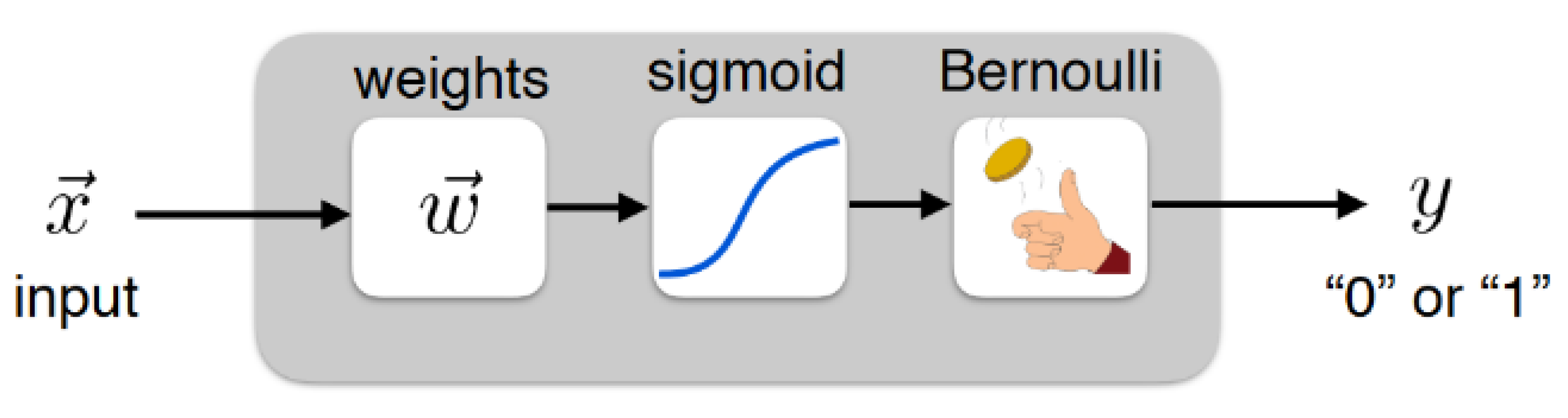
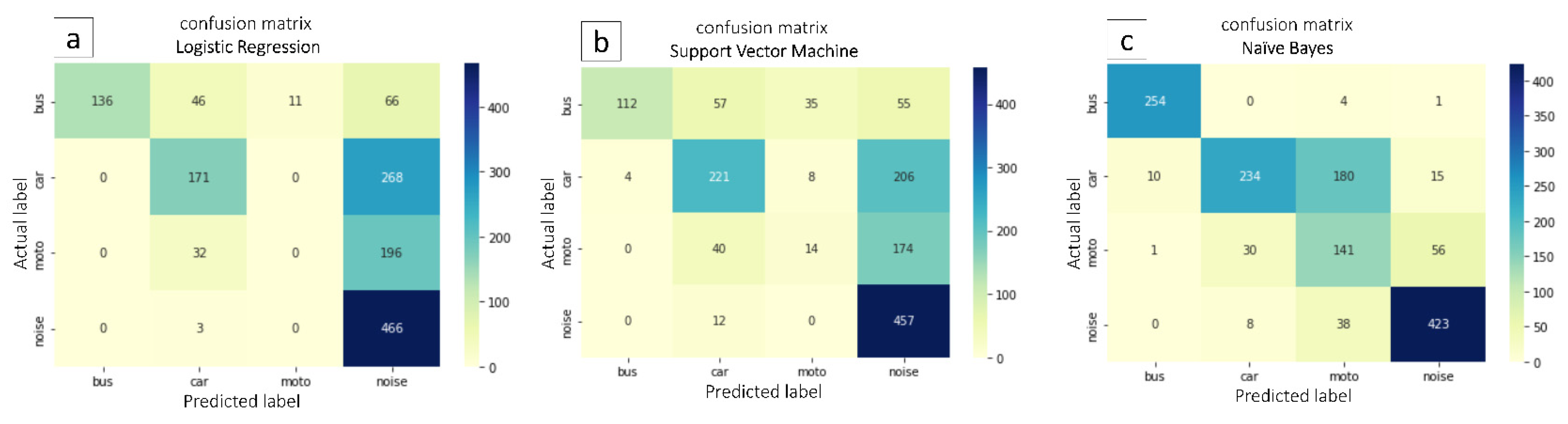
2.3.1. Logistic Regression (LR) for ML
2.3.2. Support Vector Machine (SVM)
2.3.3. Naïve Bayes (NB)
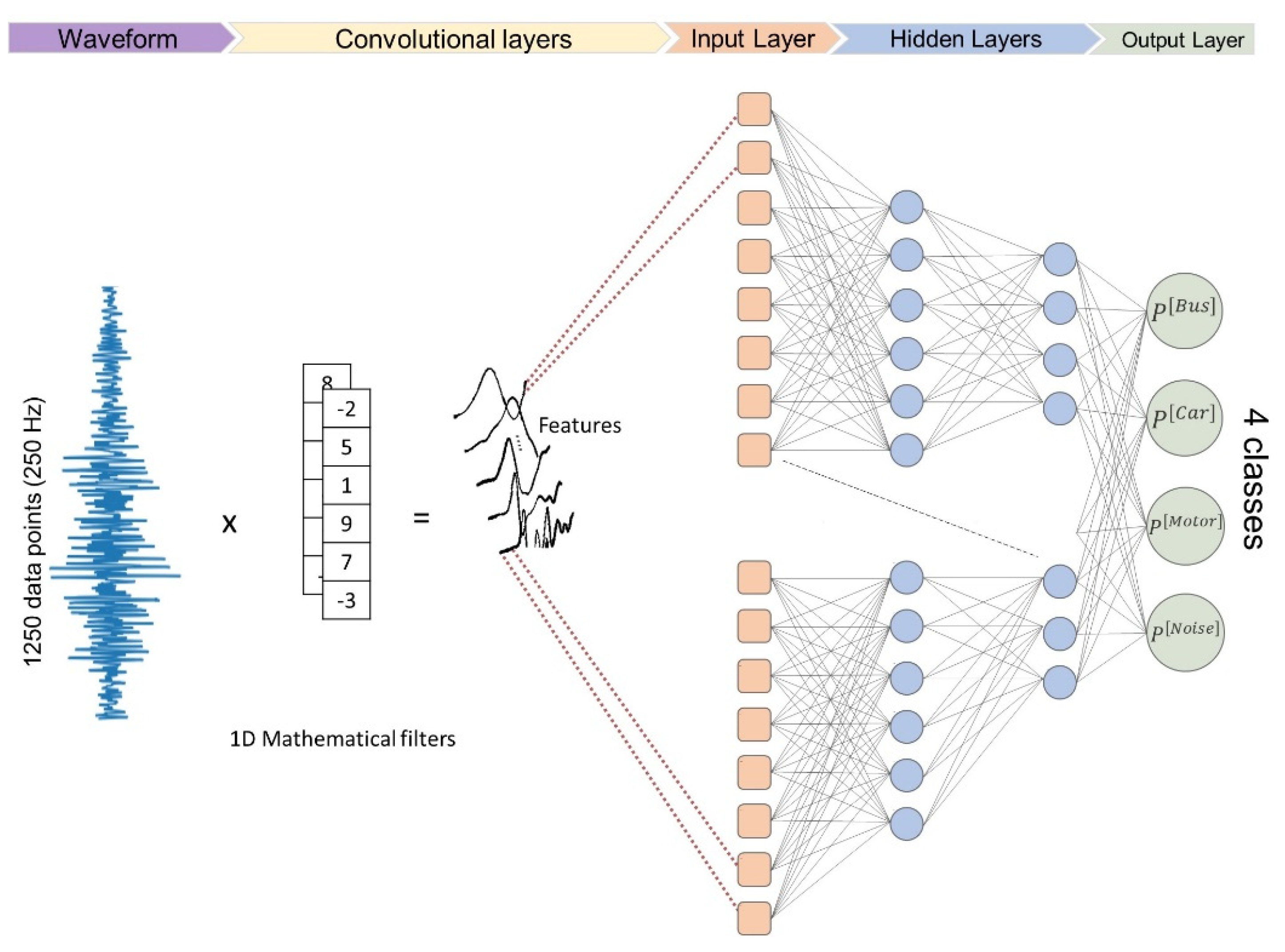
2.3.4. Convolutional Neural Networks (CNNs)
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, H.; Coifman, B. Using LIDAR to Validate the Performance of Vehicle Classification Stations. J. Intell. Transp. Syst. Technol. Plan. Oper. 2015, 19, 355–369. [Google Scholar] [CrossRef]
- U.S. Federal Highway Administration (Ed.) Traffic Monitoring Guide—Updated October 2016; Office of Highway Policy Information: Washington, DC, USA, 2016; pp. 56–59.
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef] [PubMed]
- Won, M. Intelligent Traffic Monitoring Systems for Vehicle Classification: A Survey. IEEE Access 2019, 8, 73340–73358. [Google Scholar] [CrossRef]
- Coifman, B.; Neelisetty, S. Improved Speed Estimation from Single-Loop Detectors with High Truck Flow. J. Intell. Transp. Syst. Technol. Plan. Oper. 2014, 18, 138–148. [Google Scholar] [CrossRef]
- Jeng, S.-T.; Chu, L. A high-definition traffic performance monitoring system with the Inductive Loop Detector signature technology. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems, ITSC 2014, Qingdao, China, 14 November 2014; pp. 1820–1825. [Google Scholar] [CrossRef]
- Wu, L.; Coifman, B. Improved vehicle classification from dual-loop detectors in congested traffic. Transp. Res. Part C Emerg. Technol. 2014, 46, 222–234. [Google Scholar] [CrossRef]
- Wu, L.; Coifman, B. Vehicle Length Measurement and Length-Based Vehicle Classification in Congested Freeway Traffic. Transp. Res. Rec. 2014, 2443, 1–11. [Google Scholar] [CrossRef]
- Balid, W.; Refai, H.H. Real-Time Magnetic Length-Based Vehicle Classification: Case Study for Inductive Loops and Wireless Magnetometer Sensors in Oklahoma State. Transp. Res. Rec. 2018, 2672, 102–111. [Google Scholar] [CrossRef]
- Li, Y.; Tok, A.Y.C.; Ritchie, S. Individual Truck Speed Estimation from Advanced Single Inductive Loops. Transp. Res. Rec. 2019, 2673, 272–284. [Google Scholar] [CrossRef]
- Lamas-Seco, J.J.; Castro, P.M.; Dapena, A.; Vazquez-Araujo, F.J. Vehicle Classification Using the Discrete Fourier Transform with Traffic Inductive Sensors. Sensors 2015, 15, 27201–27214. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Wang, X.; Zhang, C.; He, R.; Jia, L.; Qin, Y. Improved Robust Vehicle Detection and Identification Based on Single Magnetic Sensor. IEEE Access 2018, 6, 5247–5255. [Google Scholar] [CrossRef]
- Belenguer, F.M.; Martinez-Millana, A.; Salcedo, A.M.; Núñez, J.H.A. Vehicle Identification by Means of Radio-Frequency-Identification Cards and Magnetic Loops. IEEE Trans. Intell. Transp. Syst. 2019, 21, 5051–5059. [Google Scholar] [CrossRef]
- Li, F.; Lv, Z. Reliable vehicle type recognition based on information fusion in multiple sensor networks. Comput. Netw. 2017, 117, 76–84. [Google Scholar] [CrossRef]
- Odat, E.; Shamma, J.S.; Claudel, C. Vehicle Classification and Speed Estimation Using Combined Passive Infrared/Ultrasonic Sensors. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1593–1606. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M.; Epicoco, N.; Angelico, B.; Vinciullo, A. Automated Evaluation of Urban Traffic Congestion Using Bus as a Probe. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 967–972. [Google Scholar]
- Ahmed, S.H.; Bouk, S.H.; Yaqub, M.A.; Kim, D.; Song, H.; Lloret, J. CODIE: Controlled Data and Interest Evaluation in Vehicular Named Data Networks. IEEE Trans. Veh. Technol. 2016, 65, 3954–3963. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M.; Epicoco, N. Monitoring traffic congestion in urban areas through probe vehicles: A case study analysis. Internet Technol. Lett. 2018, 1, e5. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X.; Cao, J.; He, L.; Stenneth, L.; Yu, P.S.; Li, Z.; Huang, Z. Computing Urban Traffic Congestions by Incorporating Sparse GPS Probe Data and Social Media Data. ACM Trans. Inf. Syst. 2017, 35, 1–30. [Google Scholar] [CrossRef]
- Litman, T. Developing Indicators for Comprehensive and Sustainable Transport Planning. Transp. Res. Rec. 2007, 2017, 10–15. [Google Scholar] [CrossRef]
- Martin, P.T.; Feng, Y.; Wang, X.; Assistants, R. Detector Technology Evaluation; Mountain-Plains Consortium: Fargo, ND, USA, 2003. [Google Scholar]
- William, P.E.; Hoffman, M.W. Classification of Military Ground Vehicles Using Time Domain Harmonics’ Amplitudes. IEEE Trans. Instrum. Meas. 2011, 60, 3720–3731. [Google Scholar] [CrossRef]
- Ketcham, S.; Moran, M.; Lacombe, J.; Greenfield, R.; Anderson, T. Seismic source model for moving vehicles. IEEE Trans. Geosci. Remote Sens. 2005, 43, 248–256. [Google Scholar] [CrossRef]
- Moran, M.L.; Greenfield, R.J. Estimation of the Acoustic-to-Seismic Coupling Ratio Using a Moving Vehicle Source. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2038–2043. [Google Scholar] [CrossRef]
- Jin, G.; Ye, B.; Wu, Y.; Qu, F. Vehicle Classification Based on Seismic Signatures Using Convolutional Neural Network. IEEE Geosci. Remote Sens. Lett. 2019, 16, 628–632. [Google Scholar] [CrossRef]
- Zhao, T. Seismic facies classification using different deep convolutional neural networks. In Proceedings of the 2018 SEG International Exposition and Annual Meeting, SEG 2018, Houston, TX, USA, 14–19 October 2018; pp. 2046–2050. [Google Scholar] [CrossRef]
- Shimshoni, Y.; Intrator, N. Classification of seismic signals by integrating ensembles of neural networks. IEEE Trans. Signal Process. 1998, 46, 1194–1201. [Google Scholar] [CrossRef]
- Zhao, T.; Mukhopadhyay, P. A Fault Detection Workflow Using Deep Learning and Image Processing. In Proceedings of the 2018 SEG International Exposition and Annual Meeting, SEG 2018, Houston, TX, USA, 14–19 October 2018; pp. 1966–1970. [Google Scholar]
- Perol, T.; Gharbi, M.; Denolle, M. Convolutional neural network for earthquake detection and location. Sci. Adv. 2018, 4, e1700578. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Liu, J.; Wang, S.; Wang, T.; Shi, P. Seismic Waveform Classification and First-Break Picking Using Convolution Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 272–276. [Google Scholar] [CrossRef]
- Evans, N. Automated Vehicle Detection and Classification Using Acoustic and Seismic Signals. Ph.D. Thesis, University of York, York, UK, 2010. [Google Scholar]
- Ahmad, A.; Tsuji, T. Traffic Monitoring System Based on Deep Learning and Seismometer Data. Appl. Sci. 2021, 11, 4590. [Google Scholar] [CrossRef]
- Waldeland, A.U.; Jensen, A.C.; Gelius, L.-J.; Solberg, A.H.S. Convolutional neural networks for automated seismic interpretation. Lead. Edge 2018, 37, 529–537. [Google Scholar] [CrossRef]
- Tyagi, V.; Kalyanaraman, S.; Krishnapuram, R. Vehicular Traffic Density State Estimation Based on Cumulative Road Acoustics. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1156–1166. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Kozłowski, E.; Kłosowski, G.; Niderla, K. Logistic Regression for Machine Learning in Process Tomography. Sensors 2019, 19, 3400. [Google Scholar] [CrossRef] [Green Version]
- Grossberg, S.; Rudd, M.E. A neural architecture for visual motion perception: Group and element apparent motion. Neural Netw. 1989, 2, 421–450. [Google Scholar] [CrossRef]
- Saibi, H.; Belkacem, A.N.; Amrouche, M. Cavity auto-detection using machine learning algorithms: Logistic regression, support vector machine, and naïve Bayes. In Proceedings of the Fifth International Conference on Engineering Geophysics, Al Ain, United Arab Emirates, 21–24 October 2019; pp. 260–263. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | Recall | F1-Score | Number of Predictions | |
|---|---|---|---|---|
| Bus/Truck | 0.53 | 1.00 | 0.69 | 136 |
| Passenger car | 0.39 | 0.68 | 0.49 | 252 |
| Motorcycle | 0.00 | 0.00 | 0.00 | 11 |
| Noise | 0.99 | 0.47 | 0.64 | 966 |
| Average | 0.48 | 0.54 | 0.45 | 1395 |
| Weighted average | 0.83 | 0.55 | 0.61 | 1395 |
| Precision | Recall | F1-Score | Number of Predictions | |
|---|---|---|---|---|
| Bus/Truck | 0.43 | 0.97 | 0.60 | 116 |
| Passenger car | 0.50 | 0.67 | 0.57 | 330 |
| Motorcycle | 0.06 | 0.25 | 0.10 | 57 |
| Noise | 0.97 | 0.51 | 0.67 | 892 |
| Average | 0.49 | 0.60 | 0.49 | 1395 |
| Weighted average | 0.78 | 0.58 | 0.62 | 1395 |
| Precision | Recall | F1-Score | Number of Predictions | |
|---|---|---|---|---|
| Bus/Truck | 0.98 | 0.96 | 0.97 | 265 |
| Passenger car | 0.53 | 0.86 | 0.66 | 272 |
| Motorcycle | 0.62 | 0.39 | 0.48 | 363 |
| Noise | 0.90 | 0.85 | 0.88 | 495 |
| Average | 0.76 | 0.77 | 0.75 | 1395 |
| Weighted average | 0.77 | 0.75 | 0.75 | 1395 |
| LR | SVM | NB | CNN | |
|---|---|---|---|---|
| Accuracy | 55% | 58% | 75% | 94% |
| Running time (Seconds) | 1.664 | 12.49 | 0.150 | 112.3 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, A.B.; Saibi, H.; Belkacem, A.N.; Tsuji, T. Vehicle Auto-Classification Using Machine Learning Algorithms Based on Seismic Fingerprinting. Computers 2022, 11, 148. https://doi.org/10.3390/computers11100148
Ahmad AB, Saibi H, Belkacem AN, Tsuji T. Vehicle Auto-Classification Using Machine Learning Algorithms Based on Seismic Fingerprinting. Computers. 2022; 11(10):148. https://doi.org/10.3390/computers11100148
Chicago/Turabian StyleAhmad, Ahmad Bahaa, Hakim Saibi, Abdelkader Nasreddine Belkacem, and Takeshi Tsuji. 2022. "Vehicle Auto-Classification Using Machine Learning Algorithms Based on Seismic Fingerprinting" Computers 11, no. 10: 148. https://doi.org/10.3390/computers11100148