
Role of Roadside Units in Cluster Head Election and Coverage Maximization for Vehicle Emergency Services


Abstract
:1. Introduction
1.1. Main Contribution
- The maximum information coverage scheme is proposed where all vehicles are Legitimate Vehicles (LV) and the RSU will initialize the communication.
- To reduce the computation and complexity for selecting efficient CH, complexity is used as an acknowledgment-based approach.
- The new bridge node (BN) selection algorithm is proposed for Cluster-to-Cluster connectivity. The solution proposed two BNs for one CH. If no BN is available, the CH itself serves the role of BN and sends an update to RSU. In [24,25,26,27], cluster connectivity is achieved through broadcasting or using gateway nodes. However, the number of gateway nodes was not fixed. This leads to redundant information, residual energy wastage, and high bandwidth utilization. However, in the paper, the flagship request was served using the bridge ID. This scheme drastically decreased the broadcast message count and reduced the broadcast storm problem [28].
- Clustering metrics are divided into microscopic and macroscopic levels according to their relevance and usage. A comparative analysis of the proposed scheme, using the time barrier-based emergency message scheme, has been made. The proposed model is divided into two traffic scenarios based on uniform and non-uniform vehicle speeds. The counter model is integrated into the proposed scheme.
1.2. Organisation
2. Related Work
3. Proposed Solution
- SinkX, SinkY represent the geo-coordinates of the RSU.
- NodeXi, NodeYi represent the geo-coordinates of the Legitimate Vehicle (LV).
- Disti denotes the calculated Euclidean distance between the RSU and the LV.
3.1. Vehicle States
- RSU: This infrastructure is responsible for performing the CH selection only from the vehicles where acknowledgment has been received.
- LV: Those vehicles that intend to be part of communication.
- CH: The leader of the communicating group provided by RSU as a list of CHs from the acknowledged LVs. The matched of LV will change its status to CH and broadcast its message structure to the rest of the vehicles.
- CM: These are the rest of the LVs left after the CH selection and are given the right to choose the CH after receiving a message from the designated CH. They will change their status to CMs once the CH.
- BNs: The farthest nodes selected by CHs from the connected CMs to bridge the gap of communication between two clusters.
| Algorithm 1: Acknowledgement-Based Legitimate Vehicle Entry System to RSU for CH Selection |
 |
3.2. Acknowledgement-Based Legitimate Vehicles Entry System to RSU for CH Selection
3.3. Authoritative Behavior of Remaining LVs for Choosing CHs from Receiving Signal of Nearby CH: Cluster Formation
- 1.
- To maximize the information coverage, the test scenario vehicles have been maintained with specified margins. The specific margins are made considering the minimum safety distance. This helps to gain the maximum connected vehicle count.
- 2.
- Every node is in the range of an RSU.
- 3.
- Every node is assigned to at least one CH.
- 4.
- Each CH nominates two bridge nodes to mitigate the broadcast storm problem.
| Algorithm 2: Authoritative Behavior of Remaining LVs for Selecting the CHs: Cluster Formation |
 |
- Broadcasting messages in the format of .
- : denoted the CH ID.
- : current coordinates of CHs.
- : denoted the speed of CH.
- : denoted direction of the vehicle.
- & : denoted bridge nodes for connecting two clusters.
3.4. Cluster Maintenance
| Algorithm 3: Cluster Maintenance |
 |
- 1.
- Assumption:
- (a)
- RSU already identifies the arrival of .
- 2.
- Conditions:
- (a)
- If there exist vehicles, RSU will send the last CH and BN details to . , after verifying its route id , destination id , and relative distance , will select the CH. Thus, CH updates its BN.
- (b)
- If does not have relevant matched mobility metric criteria to become the member of existing CH, it will send a to RSU for re-clustering only if it is in transmission range, i.e., omnidirectional. Till that point, the node is considered to be a free node.
3.5. When a New Node Arrives and Road Information Is Provided by RSU
- 1.
- If the and and between CH and New, then according to the bridge node selection methodology, it has been assumed that the CH is also BN and the last node of traffic flow. The New sends to CH and CH sends the to the New. According to the simulation results, it is found that the completion of this process increases by 1.536 ms (approximately) for the one node that is seen.
- 2.
- Similarly, if the and and between BN and New, then New sends the . BN sends the updated joined request to CH. Then, CH will send the updated to all the CMs and RSU.
3.6. Re-Clustering Using RSU
4. Performance Evaluation
4.1. Testing Scenario
4.2. Performance Metrics
- 1.
- Macroscopic Performance:
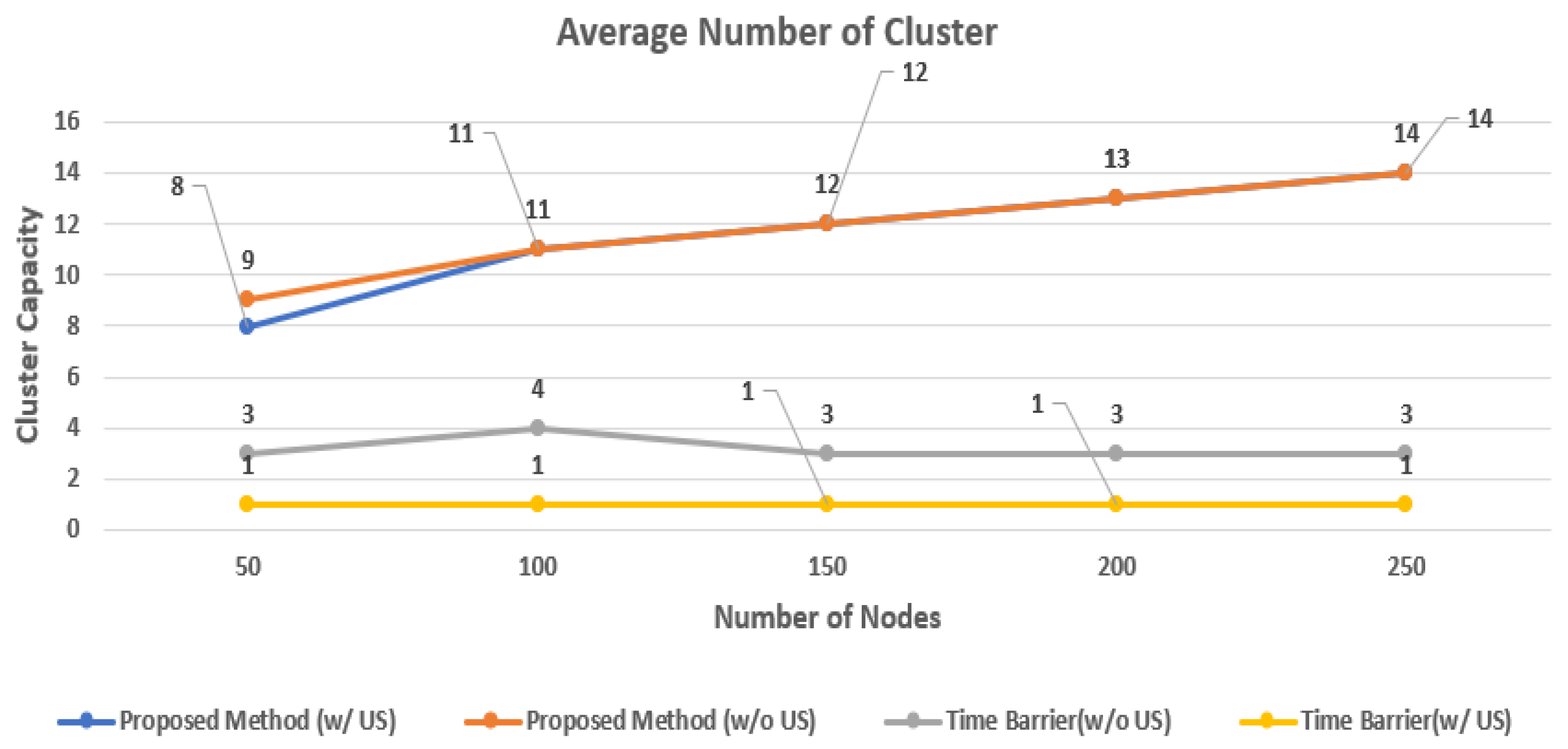
- Number of Clusters defines the total count of clusters formed with different densities of vehicles on the road.
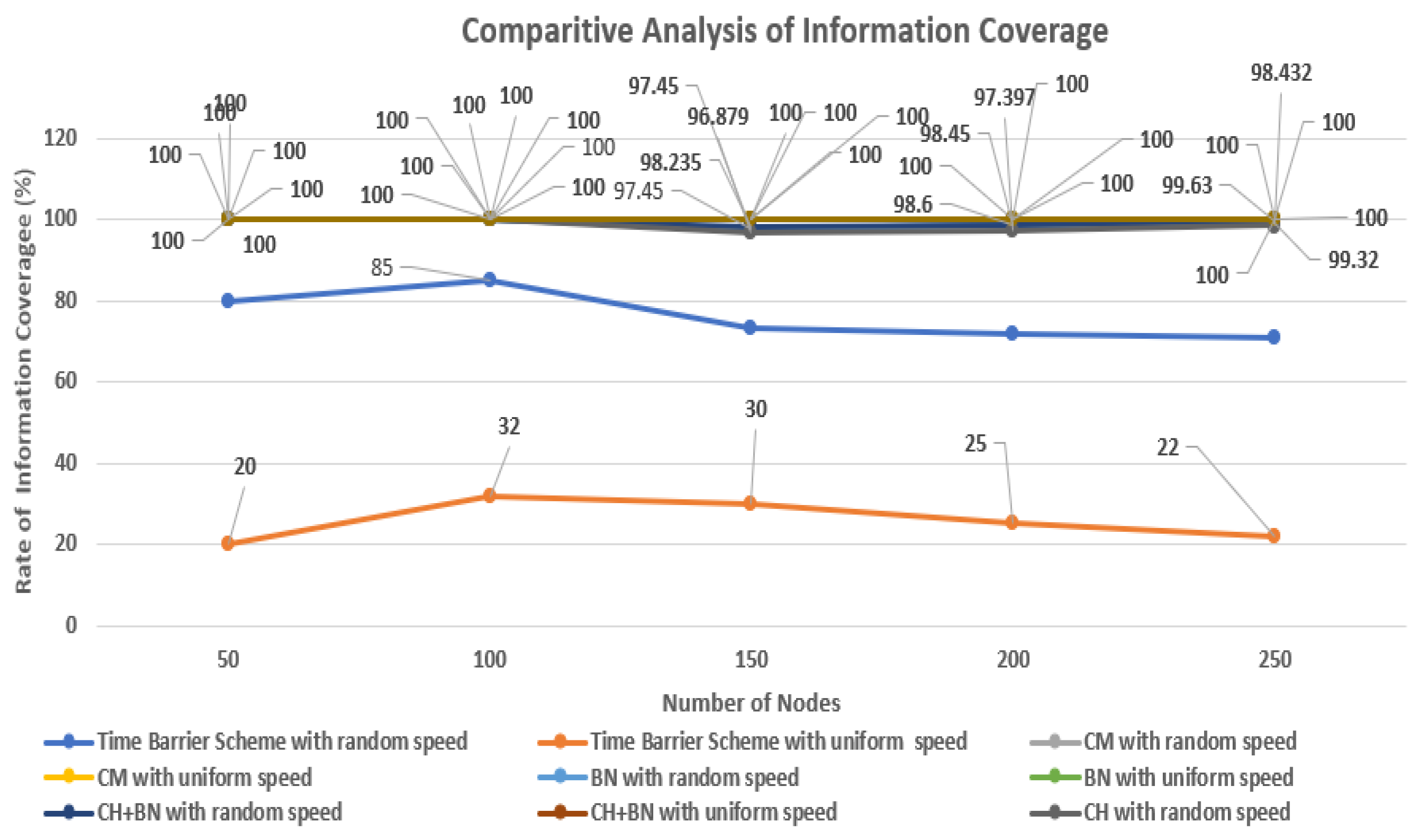
- Clustering efficiency is defined as the number of LVs that participated during the clustering procedure. The maximum number of connected vehicles determines the clustering performance.
- 2.
- Microscopic Performance:
- Number of CHs is the total count of CHs selected by RSUs.
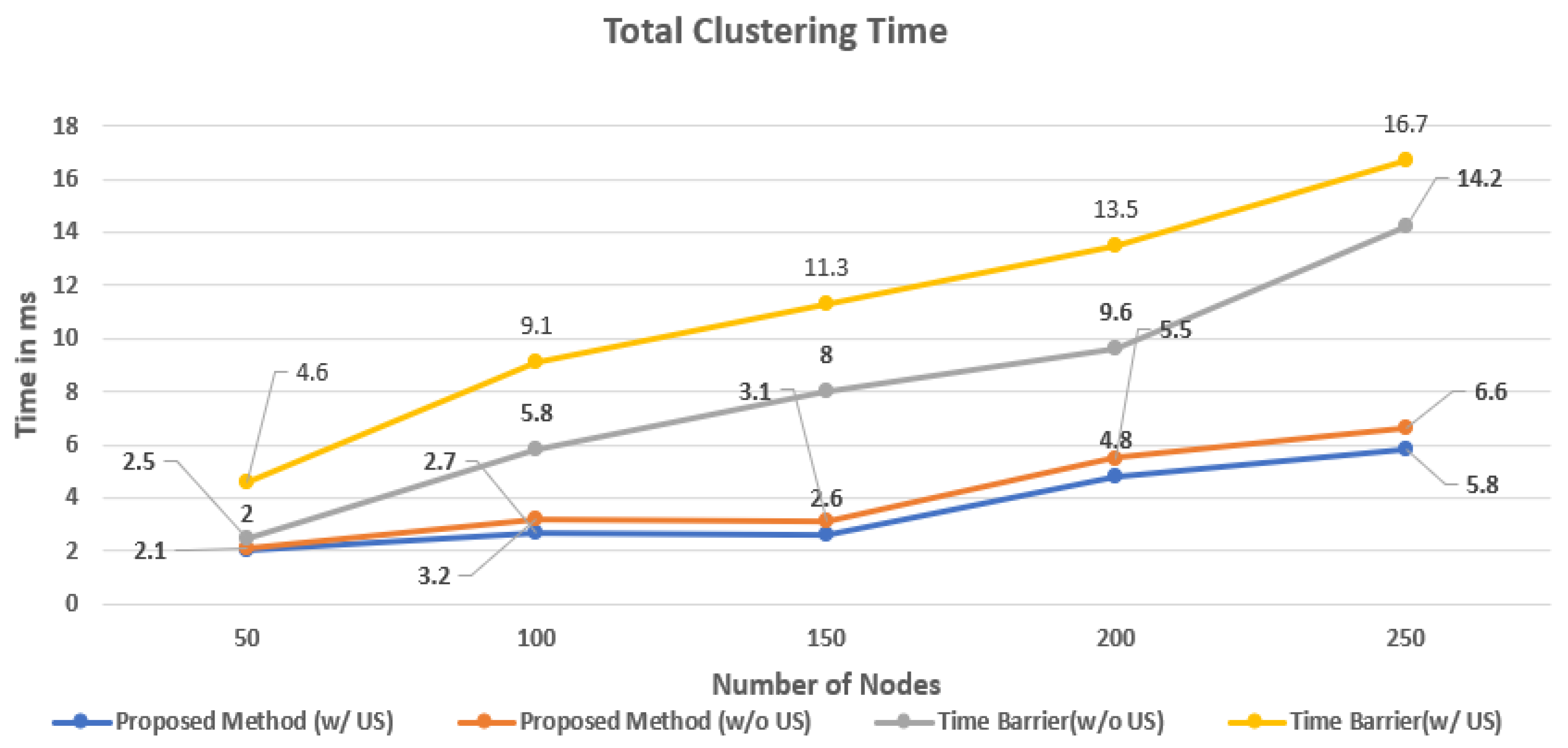
- Total Clustering Procedure Time is defined as the complete clustering process time beginning from the selection of CHs to cluster formation.
4.3. Performance Comparison with Time Barrier Mechanism and RA-HEMB with Uniform and Non-Uniform Speed Parameter
4.4. Summary of Observations
- 1.
- The time frame computed for CH selection and clustering is much lower in the proposed scheme and has a marginal difference in the sub-scenarios.
- 2.
- The bridge nodes of the proposed scheme are limited to at most two in number in comparison to the time barrier scheme where the gateway node number reaches n. The fixed number of leads to providing uniformity. However, the second most of CH and RSU is reserved as a backup if the system fails. This will provide the confirmed path for a message to travel. This illustrates the importance of new bridge node formation.
- 3.
- It is observed that the average capacity of clusters is lower whereas the total cluster formation is greater than the compared scheme, respectively. However, there is a uniform pattern in CH selection and CH average capacity, whereas the counter scheme started decreasing its value after 150 nodes. Therefore, we can conclude that our proposed scheme provides small clusters with high robustness, cluster stability, and maximum connected networks, especially under dense traffic scenarios.
5. The Framework Analysis of a New Clustering Scheme to Maximize Information Coverage
5.1. Overhead Analysis
5.2. The Performance Analysis of a New Clustering Scheme to Maximize Information Coverage
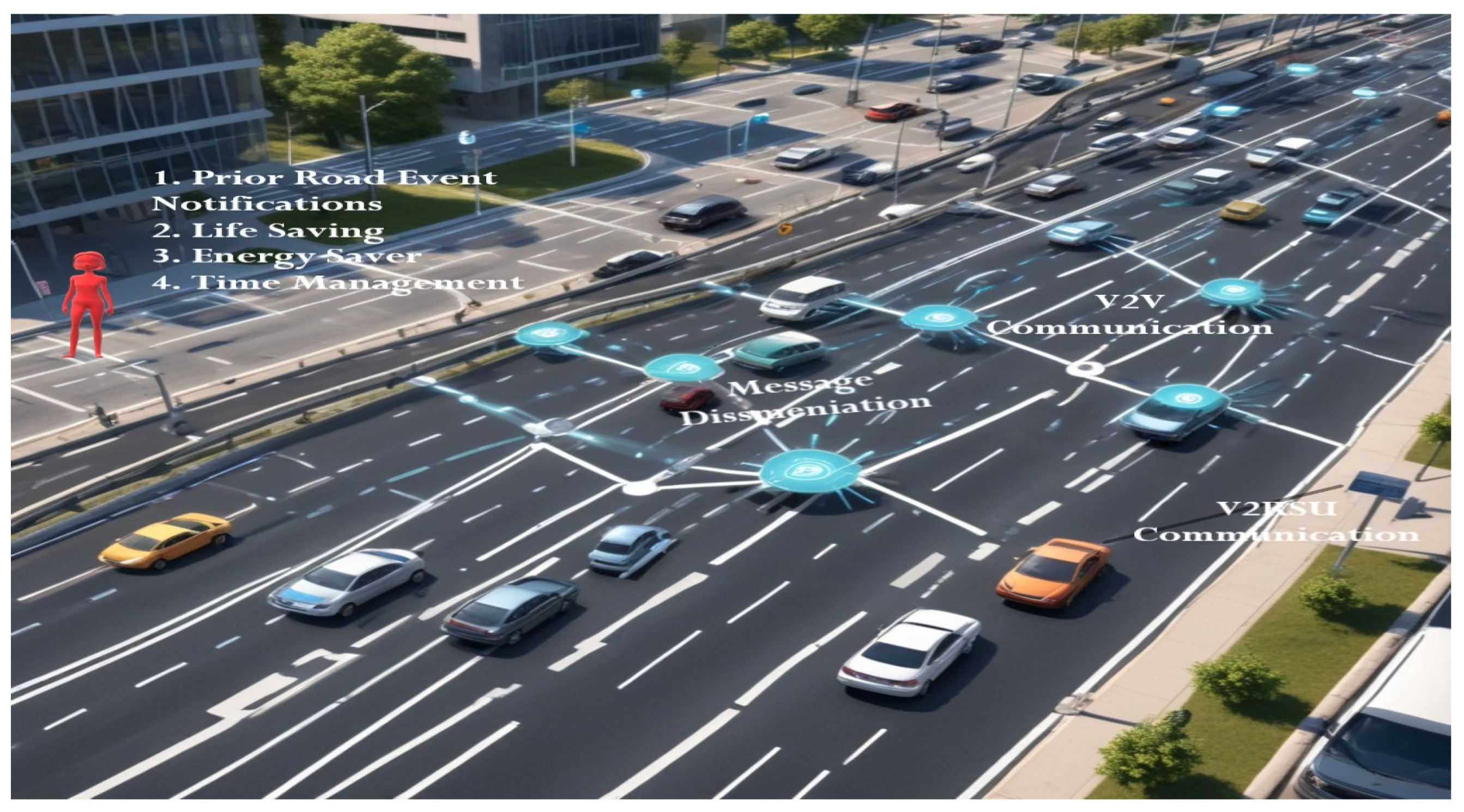
- During CH selection, only the vehicle sends an acknowledgment to the RSU to become part of the selection procedure, thus having V2RSU communication. However, only V2V communication has been carried out on time barrier schemes.
- In the proposed scheme, two sub-scenarios are simulated, whereas the implemented time barrier scheme works with non-uniform speed. However, the original time barrier scheme provides an infinite value of CH eligibility for uniform speed scenarios. Considering the above-stated result, the uniform speed of vehicles is set to 1 in a simulated environment.
- The maximized connected network has been deduced by the proposed bridge node method where at least two nodes act as intermediate nodes for different cluster connectivity, whereas the time barrier scheme has a n number of gateway nodes that increase the delay and broadcast storm problem during emergencies.
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Azizi, M.; Shokrollahi, S. RTRV: An RSU-assisted trust-based routing protocol for VANETs. Ad Hoc Netw. 2024, 154, 103387. [Google Scholar] [CrossRef]
- Chen, C.; Si, J.; Li, H.; Han, W.; Kumar, N.; Berretti, S.; Wan, S. A High Stability Clustering Scheme for the Internet of Vehicles. IEEE Trans. Netw. Serv. Manag. 2024, 21, 4297–4311. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Cinque, E.; Valentini, F.; Persia, A.; Chiocchio, S.; Santucci, F.; Pratesi, M. V2X Communication Technologies and Service Requirements for Connected and Autonomous Driving. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Catania, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Sepulcre, M.; Gozalvez, J.; Thandavarayan, G.; Coll-Perales, B.; Schindler, J.; Rondinone, M. On the potential of V2X message compression 495 for vehicular networks. IEEE Access 2020, 8, 214254–214268. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, K. Emerging technologies for 5G-enabled vehicular networks. IEEE Access 2013, 7, 181117–181141. [Google Scholar] [CrossRef]
- Ma, L.; Liu, C.; Ma, T.; Liu, S. PaVa: A novel Path-based Valley-seeking clustering algorithm. Inf. Sci. 2024, 665, 120380. [Google Scholar] [CrossRef]
- Kaur, R.; Singla, C.; Thuseethan, S. Crowd-sourced-based emergency response on the Internet of Vehicles (IOV): Harnessing strengths and limitations. In Artificial Intelligence and Internet of Things Based Augmented Trends for Data Driven Systems; CRC Press: Boca Raton, FL, USA, 2024; pp. 262–280. [Google Scholar]
- Kaur, R.; Singla, C.; Singh, H.; Bhardwaj, R.; Sharma, P.; Aggarwal, A.; Alsekait, D.M.; Elminaam, D.S.A. A Comprehensive Framework for Emergency Message Dissemination in Urban VANET Scenarios: A Comparative Analysis of Clustering-Based Routing Protocols. IEEE Access 2024, 12, 174284–174296. [Google Scholar] [CrossRef]
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A comparative survey of VANET clustering techniques. IEEE Commun. Surv. Tutor. 2016, 19, 657–681. [Google Scholar] [CrossRef]
- Lin, C.; Gerla, M. Adaptive clustering for mobile wireless networks. IEEE J. Sel. Areas Commun. 1997, 15, 1265–1275. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, J.; Khoukhi, L.; Labiod, H.; Veque, V. A Unified Framework of Clustering Approach in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1401–1414. [Google Scholar] [CrossRef]
- Khabazian, M.; Ali, M.K. A performance modeling of connectivity in vehicular ad hoc networks. IEEE Trans. Veh. Technol. 2008, 57, 2440–2450. [Google Scholar] [CrossRef]
- Shah, S.S.; Malik, A.W.; Rahman, A.U.; Iqbal, S.; Khan, S.U. Time barrier-based emergency message dissemination in vehicular ad-hoc networks. IEEE Access 2019, 7, 16494–16503. [Google Scholar] [CrossRef]
- Ullah, S.; Abbas, G.; Waqas, M.; Abbas, Z.H.; Halim, Z. Multi-hop emergency message dissemination through optimal cooperative forwarder in grid-based 5G-VANETs. J. Ambient Intell. Humaniz. Comput. 2023, 14, 4461–4476. [Google Scholar] [CrossRef]
- Singla, A.; Hussain, S.R.; Chowdhury, O.; Bertino, E.; Li, N. Protecting the 4G and 5G Cellular Paging Protocols against Security and Privacy Attacks. Proc. Priv. Enhancing Technol. 2020, 2020, 126–142. [Google Scholar] [CrossRef]
- Kaur, R.; Ramachandran, R.K.; Doss, R.; Pan, L. A Multi-Domain Perspective of Future Directions for VANETs for Emergency Message Dissemination; Wiley: Hoboken, NJ, USA, 2022. [Google Scholar]
- Qi, J.; Zheng, N.; Xu, M.; Chen, P.; Li, W. A hybrid-trust-based emergency message dissemination model for vehicular ad hoc networks. J. Inf. Secur. Appl. 2024, 81, 103699. [Google Scholar] [CrossRef]
- Shen, R.; Gao, M.; Li, W.; Li, Y. Task Offloading Oriented Cluster Generation Scheme in Vehicular Networks. IEEE Trans. Veh. Technol. 2024, 73, 9142–9146. [Google Scholar] [CrossRef]
- Debalki, Y.A.; Hou, J.; Ullah, H.; Adane, B.Y. Multi-hop data dissemination using a multi-metric contention-based broadcast suppression strategy in VANETs. Ad Hoc Netw. 2023, 140, 103070. [Google Scholar] [CrossRef]
- Azzoug, Y.; Boukra, A. A bio-inspired adaptive junction-based routing protocol for VANETs. Peer-to-Peer Netw. Appl. 2024, 17, 1103–1137. [Google Scholar] [CrossRef]
- Kaur, R.; Doss, R.; Pan, L. The route based emergency message dissemination scheme using multihop wireless network for VANETs. Telecommun. Syst. 2024, 87, 1183–1199. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, J.; Khoukhi, L.; Labiod, H.; Vèque, V. A review of clustering algorithms in VANETs. Ann. Telecommun. 2021, 76, 581–603. [Google Scholar] [CrossRef]
- Abbas, A.; Mohammed, I.H.; Audah, L.; Alduais, N. A novel intelligent cluster-head (ICH) to mitigate the handover problem of clustering in VANETs. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 194–203. [Google Scholar] [CrossRef]
- Afrashteh, M.; Babaie, S. A route segmented broadcast protocol based on RFID for emergency message dissemination in vehicular ad-hoc networks. IEEE Trans. Veh. Technol. 2020, 69, 16017–16026. [Google Scholar] [CrossRef]
- Badole, M.H.; Thakare, A.D. Cluster-Based Multicast Optimized routing in VANETs using Elite Knowledge-Based Genetic Algorithm. Knowl.-Based Syst. 2024, 294, 111773. [Google Scholar] [CrossRef]
- Chao, G.; Sun, S.; Bi, J. A survey on multiview clustering. IEEE Trans. Artif. Intell. 2021, 2, 146–168. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Ge, H.; Zhang, T.; Cui, Y.Y.; Liu, X.; Mao, G. New Multi-Hop Clustering Algorithm for Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1517–1530. [Google Scholar] [CrossRef]
- Jalooli, A.; Marefat, A. Cluster Stability-Driven Optimization for Enhanced Routing in Heterogeneous Vehicular Networks. Veh. Commun. 2024, 47, 100745. [Google Scholar] [CrossRef]
- Chithaluru, P.; Uyyala, R.; Singh, A.; Alfarraj, O.; Lopez, L.A.; Khatak, S.; Alkhayyat, A.H. A Lightweight Energy-Efficient Routing Scheme for Real-Time WSN-VANET-Based Applications. IEEE Trans. Consum. Electron. 2024, 70, 3820–3826. [Google Scholar] [CrossRef]
- Remy, G.; Senouci, S.M.; Jan, F.; Gourhant, Y. LTE4V2X: LTE for a centralized VANET organization. In Proceedings of the 2011 IEEE Global Telecommunications Conference (GLOBECOM 2011), Houston, TX, USA, 5–9 December 2011; pp. 1–6. [Google Scholar]
- Kumari, A.; Kumar, S.; Raw, R.S. Advancing VANET stability: Enhanced cluster head selection with iTTM and weighted CRITIC. J. Supercomput. 2024, 80, 16133–16172. [Google Scholar] [CrossRef]
- Ağgün, F.; Çıbuk, M.; Ur-Rehman, S. A new Self-Organizing Multi-channel MAC schema for RSU-centric VANETs. Phys. A Stat. Mech. Its Appl. 2020, 551, 124098. [Google Scholar] [CrossRef]
- Alghamdi, S.A. Novel path similarity aware clustering and safety message dissemination via mobile gateway selection in cellular 5G-based V2X and D2D communication for urban environment. Ad Hoc Netw. 2020, 103, 102150. [Google Scholar] [CrossRef]
- Chettibi, S. Combination of HF set and MCDM for stable clustering in VANETs. IET Intell. Transp. Syst. 2020, 14, 190–195. [Google Scholar] [CrossRef]
- Fourati, L.C.; Ayed, S.; Rejeb, M.A.B. ICN clustering-based approach for VANETs. Ann. Telecommun. 2021, 76, 745–757. [Google Scholar] [CrossRef]
- Xi, D.; Zhang, H.; Cao, Y.; Yuan, D. An RSUs-Assisted Hybrid Emergency Messages Broadcasting Protocol for VANETs. IEEE Internet Things J. 2023, 10, 17479–17489. [Google Scholar] [CrossRef]
- Debalki, Y.A.; Hou, J.; Adane, B.Y.; Mawutor, V.G.; Dang, H. A distributed relay selection using a fuzzy-BCM based decision making strategy for multi-hop data dissemination in VANETs. Wirel. Netw. 2024, 30, 2873–2894. [Google Scholar] [CrossRef]
- Seth, I.; Guleria, K.; Panda, S.N. A comprehensive review on vehicular ad-hoc networks routing protocols for urban and highway scenarios, research gaps and future enhancements. Peer-to-Peer Netw. Appl. 2024, 17, 2090–2122. [Google Scholar] [CrossRef]
- Ali, M.; Malik, A.W.; Rahman, A.U.; Iqbal, S.; Hamayun, M.M. Position-based emergency message dissemination for Internet of vehicles. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719861585. [Google Scholar] [CrossRef]
- Du, Z.; Wu, C.; Yoshinaga, T.; Yau, K.L.A.; Ji, Y.; Li, J. Federated learning for vehicular internet of things: Recent advances and open issues. IEEE Open J. Comput. Soc. 2020, 1, 45–61. [Google Scholar] [CrossRef]
- Alkhalifa, I.S.; Almogren, A.S. NSSC: Novel segment based safety message broadcasting in cluster-based vehicular sensor network. IEEE Access 2020, 8, 34299–34312. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Simulation Time | 600 s |
| 0.1 ms | |
| 0.1 ms | |
| Length of Road | 1 km |
| Number of Nodes/Vehicle Density | 50, 100, 150, 200, 250 |
| Transmission Range for vehicles | 300 m |
| Transmission Range for RSU | 1000 m |
| Uniform Speed | 20 m/s |
| Non-Uniform Speed | 25 m/s–45 m/s |
| Size of a Vehicle | 4.5 m |
| Mobility Model | Car—following model |
| Number of Iterations | 30 |
| Number of Repetition | 30 |
| Frequency/Channel Bandwidth | 5.9 GHz/10 MHz |
| MAC Protocol | IEEE802.11p |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaur, R.; Doss, R.; Pan, L.; Singla, C.; Thuseethan, S. Role of Roadside Units in Cluster Head Election and Coverage Maximization for Vehicle Emergency Services. Computers 2025, 14, 152. https://doi.org/10.3390/computers14040152
Kaur R, Doss R, Pan L, Singla C, Thuseethan S. Role of Roadside Units in Cluster Head Election and Coverage Maximization for Vehicle Emergency Services. Computers. 2025; 14(4):152. https://doi.org/10.3390/computers14040152
Chicago/Turabian StyleKaur, Ravneet, Robin Doss, Lei Pan, Chaitanya Singla, and Selvarajah Thuseethan. 2025. "Role of Roadside Units in Cluster Head Election and Coverage Maximization for Vehicle Emergency Services" Computers 14, no. 4: 152. https://doi.org/10.3390/computers14040152
APA StyleKaur, R., Doss, R., Pan, L., Singla, C., & Thuseethan, S. (2025). Role of Roadside Units in Cluster Head Election and Coverage Maximization for Vehicle Emergency Services. Computers, 14(4), 152. https://doi.org/10.3390/computers14040152