
Explore Optical Solitary Wave Solutions of the kp Equation by Recent Approaches


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology of the Modified (w/g)-Expansion Approach
3. Application of Extended Rational (w/g)-Expansion Approach
3.1. The Modified -Expansion Approach
3.2. The Modified -Expansion Approach
3.3. The Generalized Simple ()-Expansion Method
4. Addendum to the Kudryashov Method (akm)
4.1. Methodology of akm
4.2. Addendum to the Kudryashov Method (akm) to the Kadomtsev–Petviashvili (kp) Equation
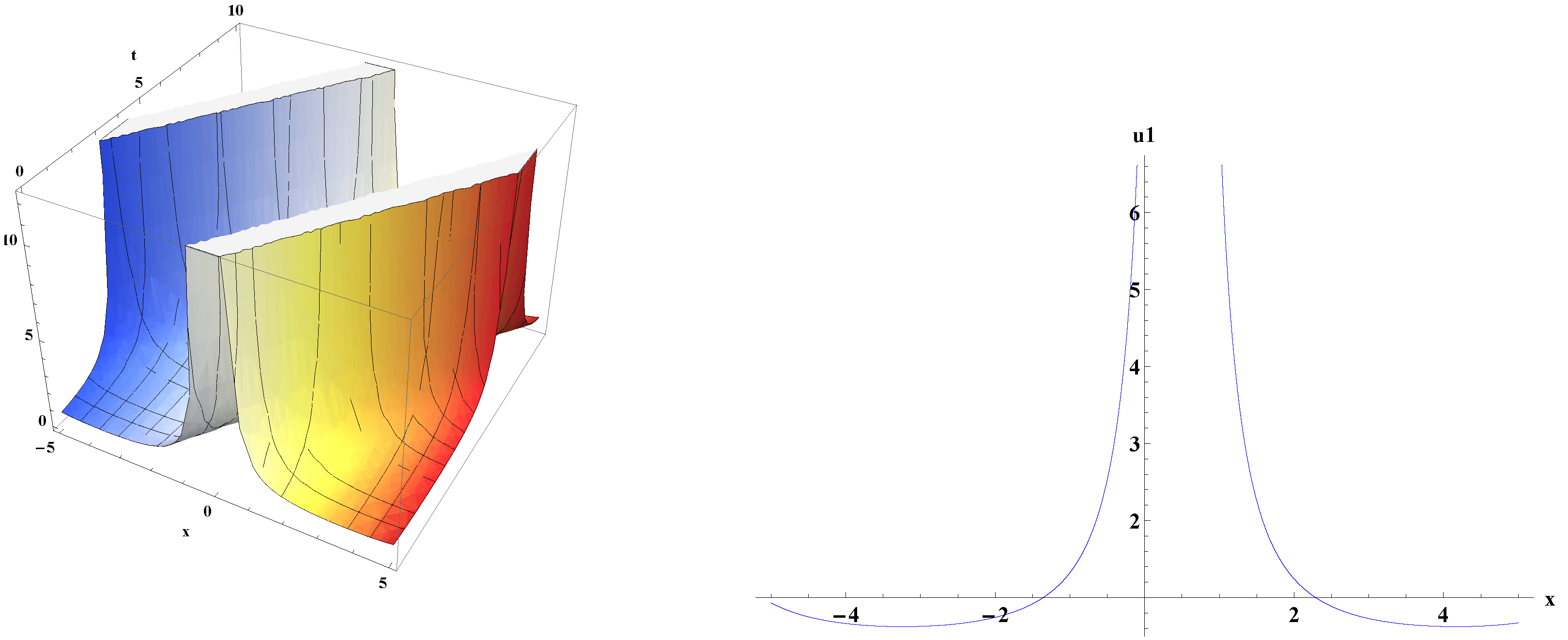
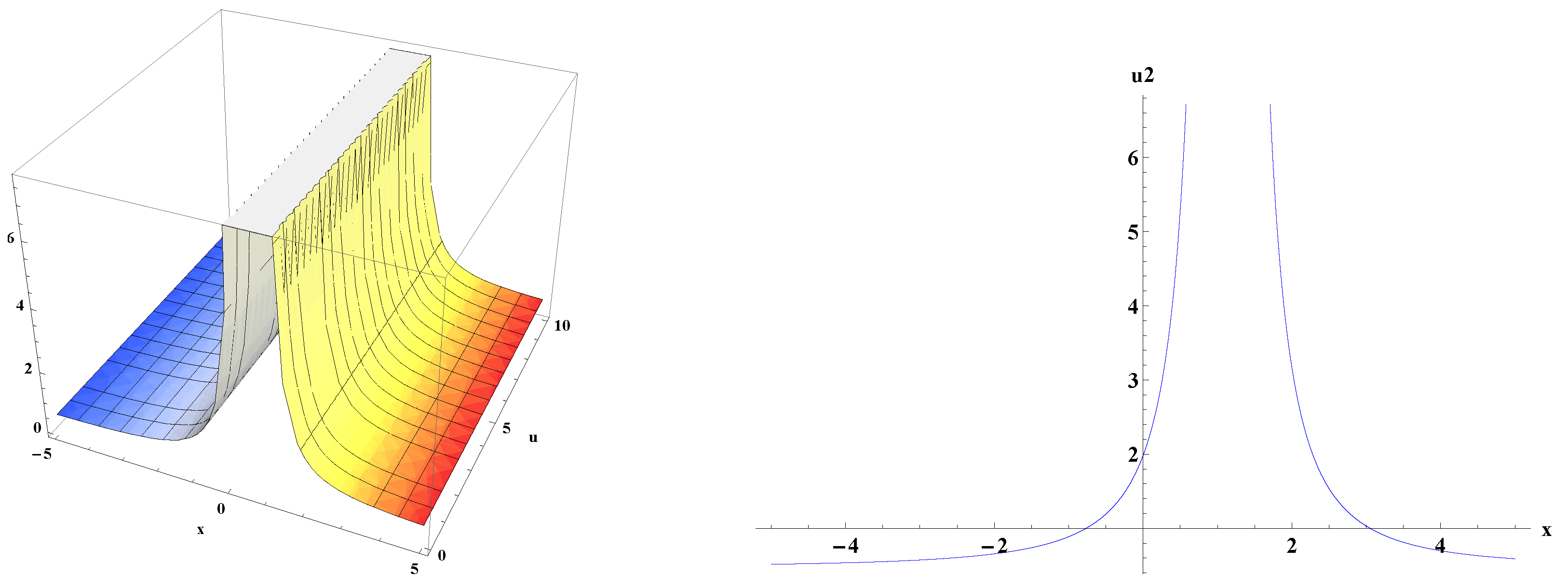
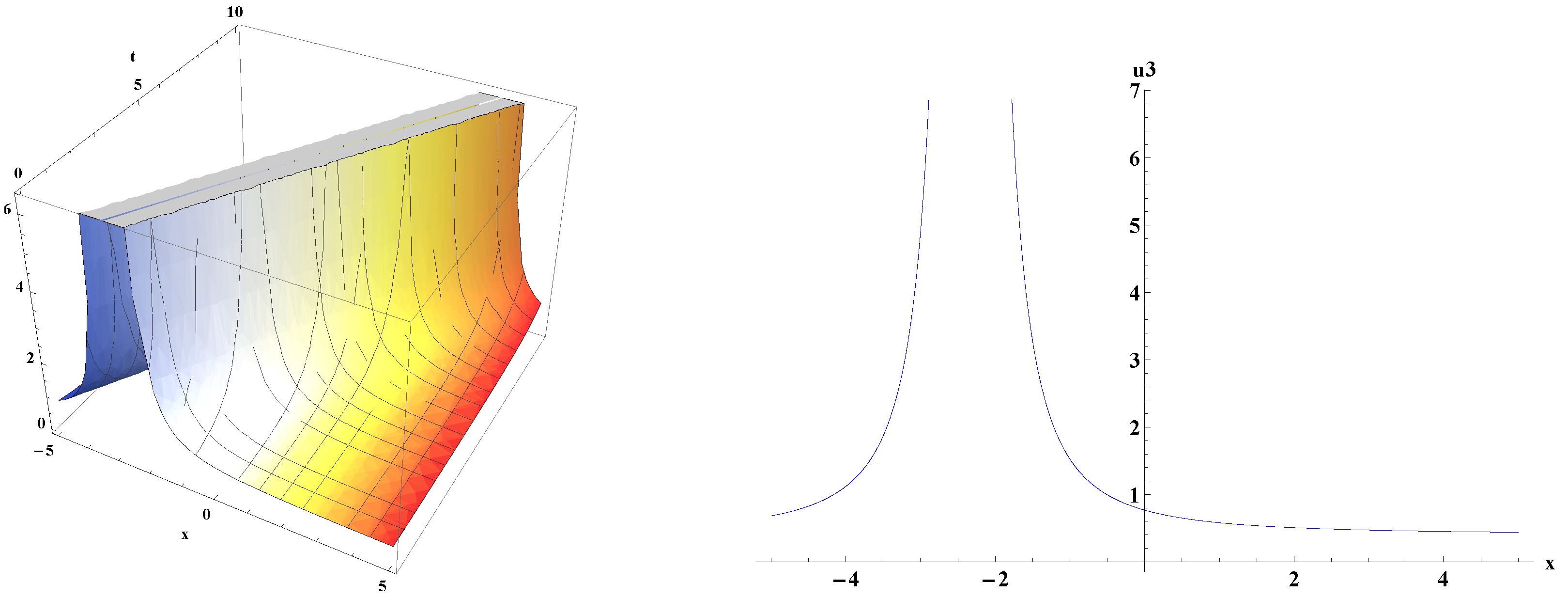
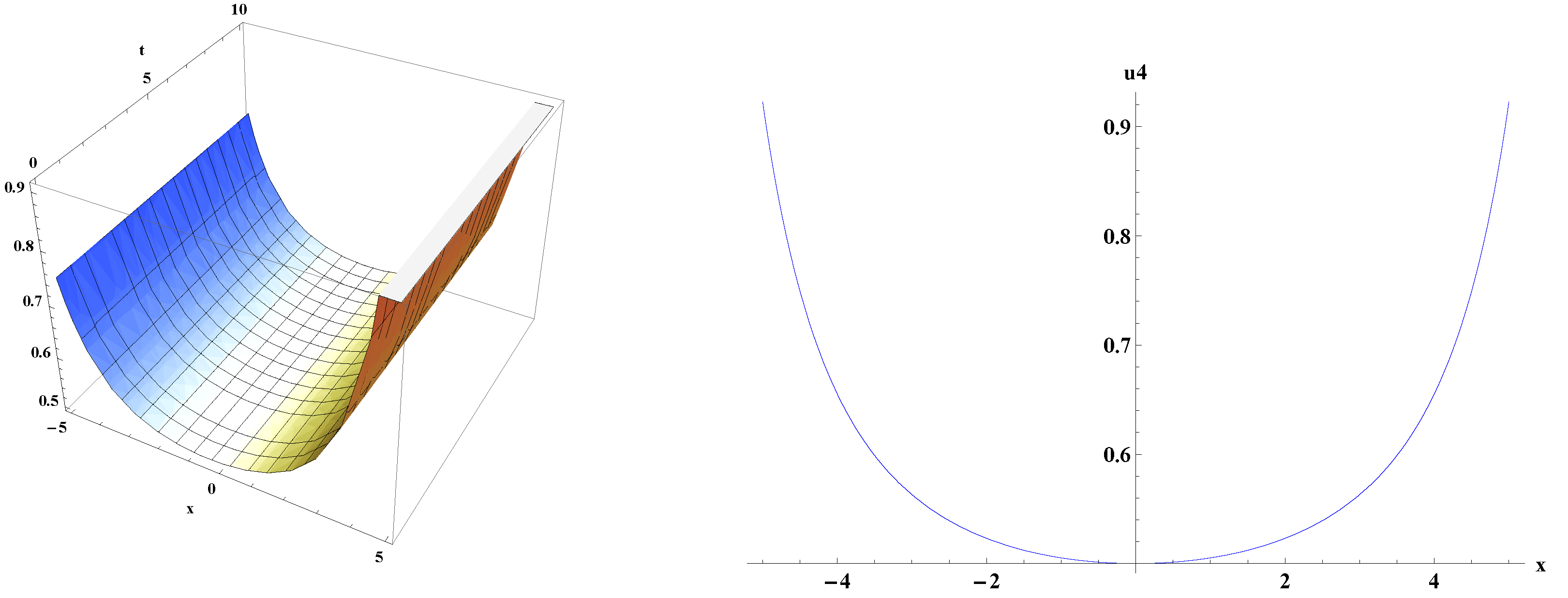
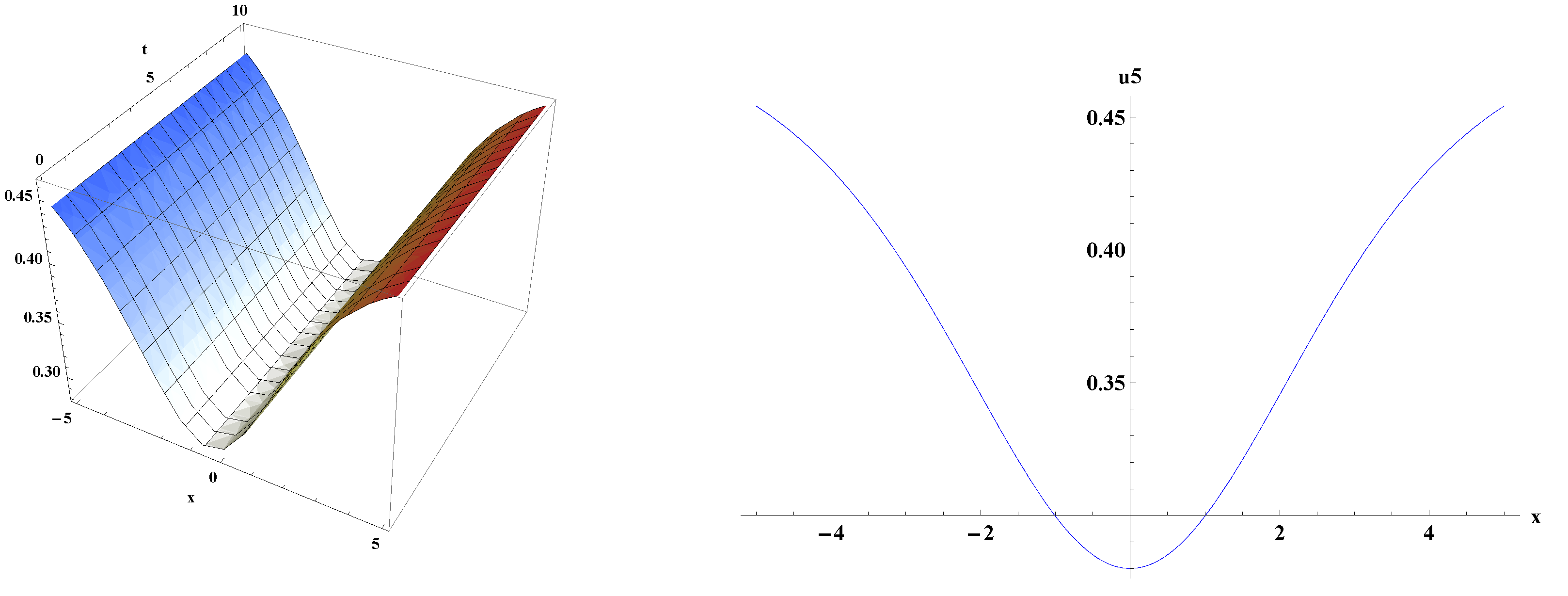
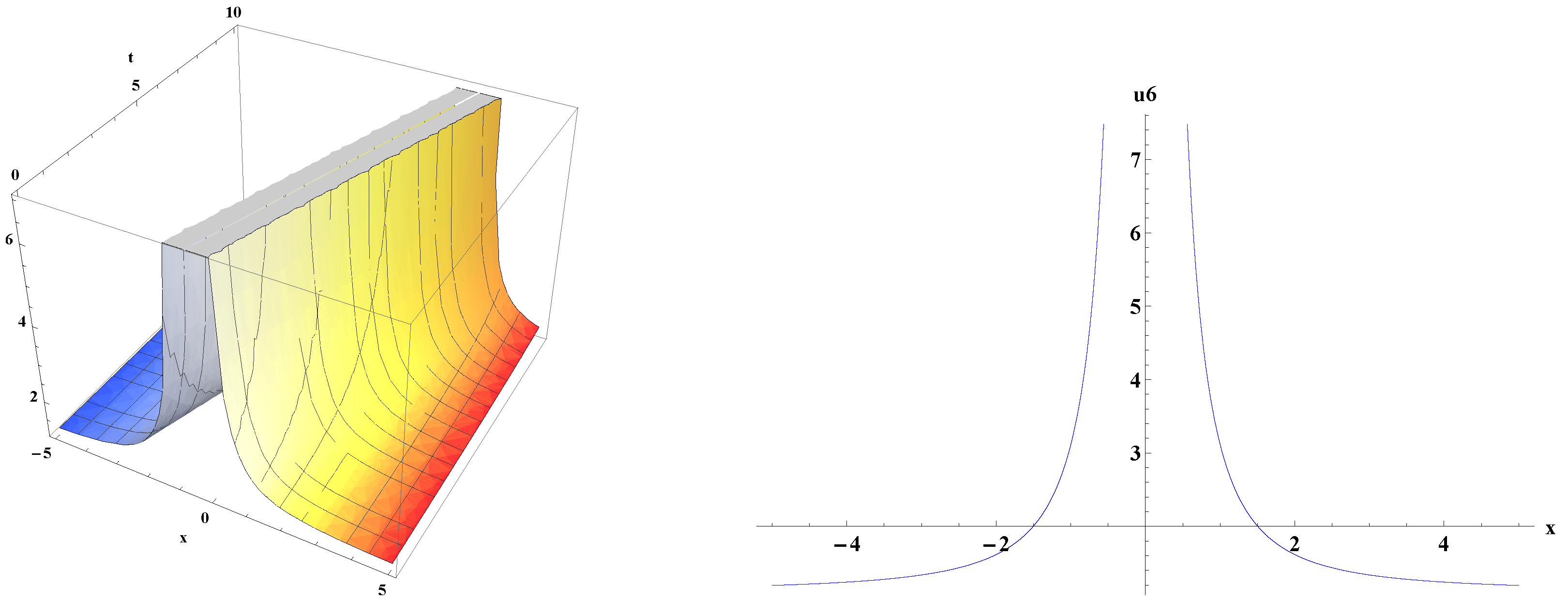
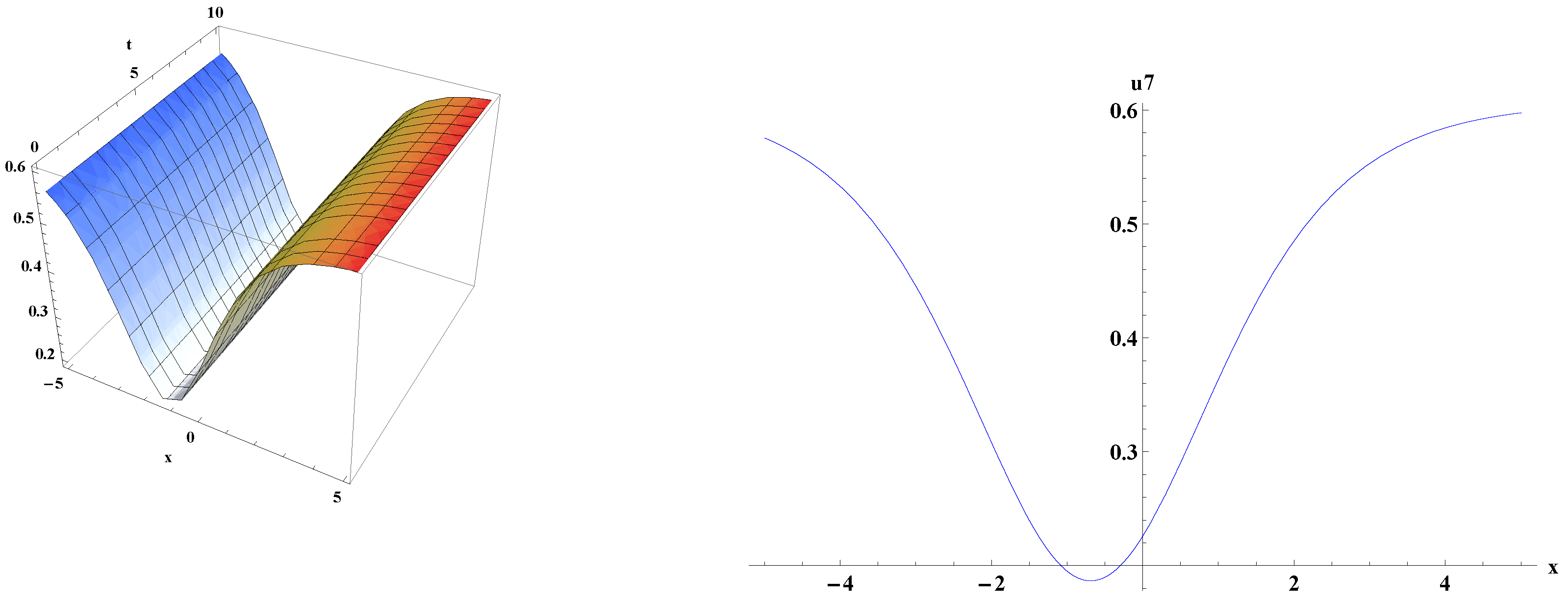
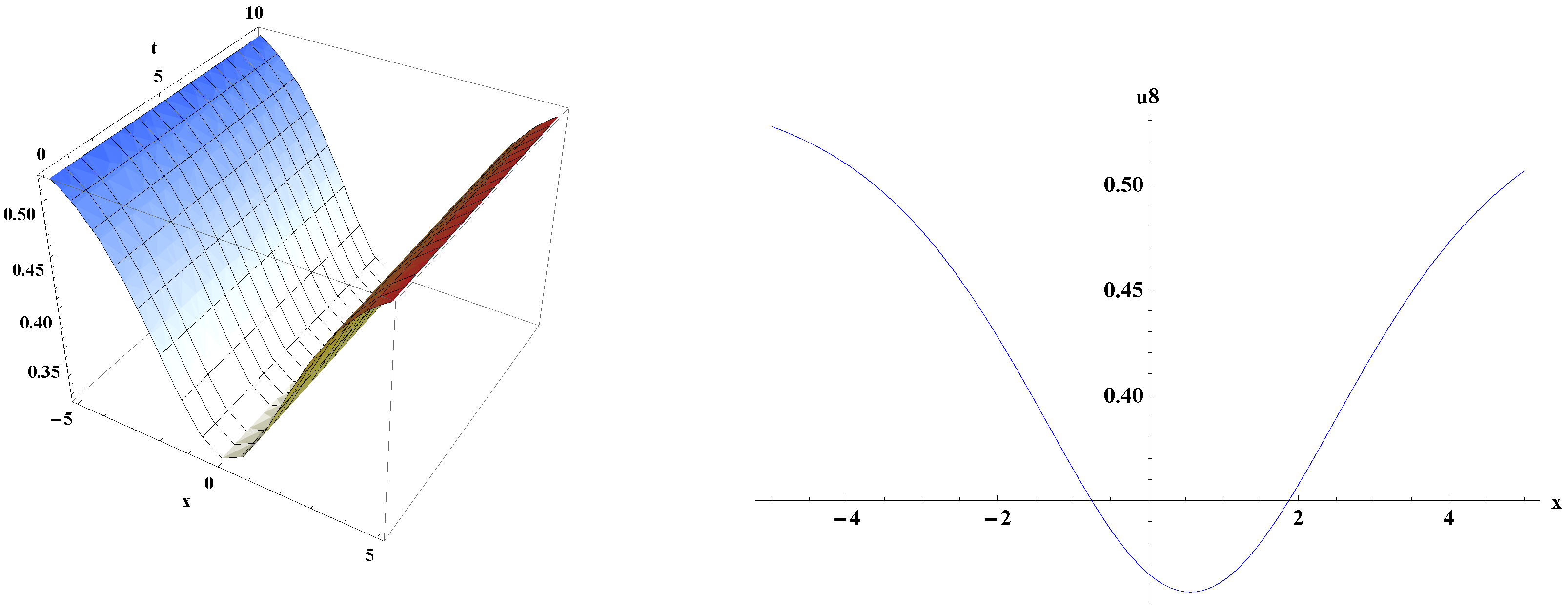
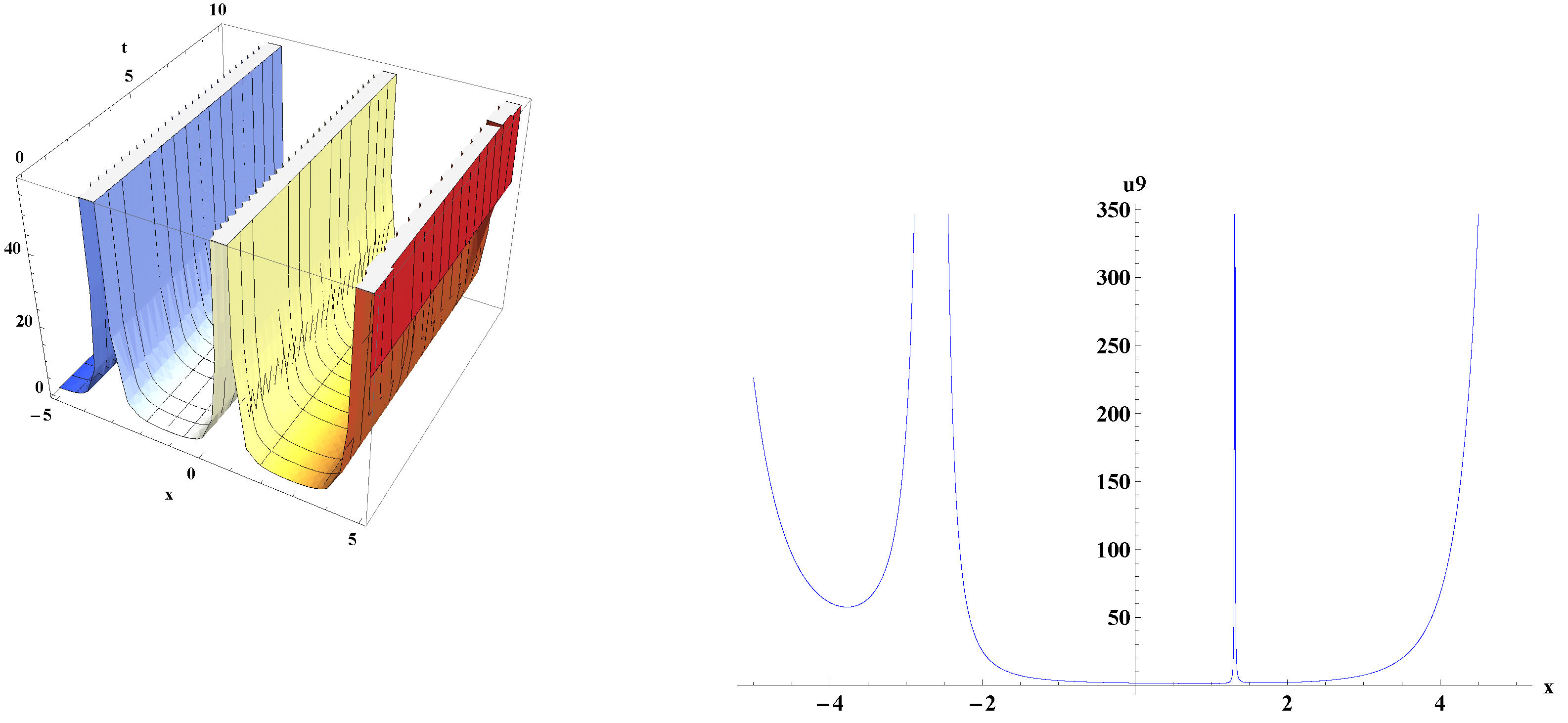
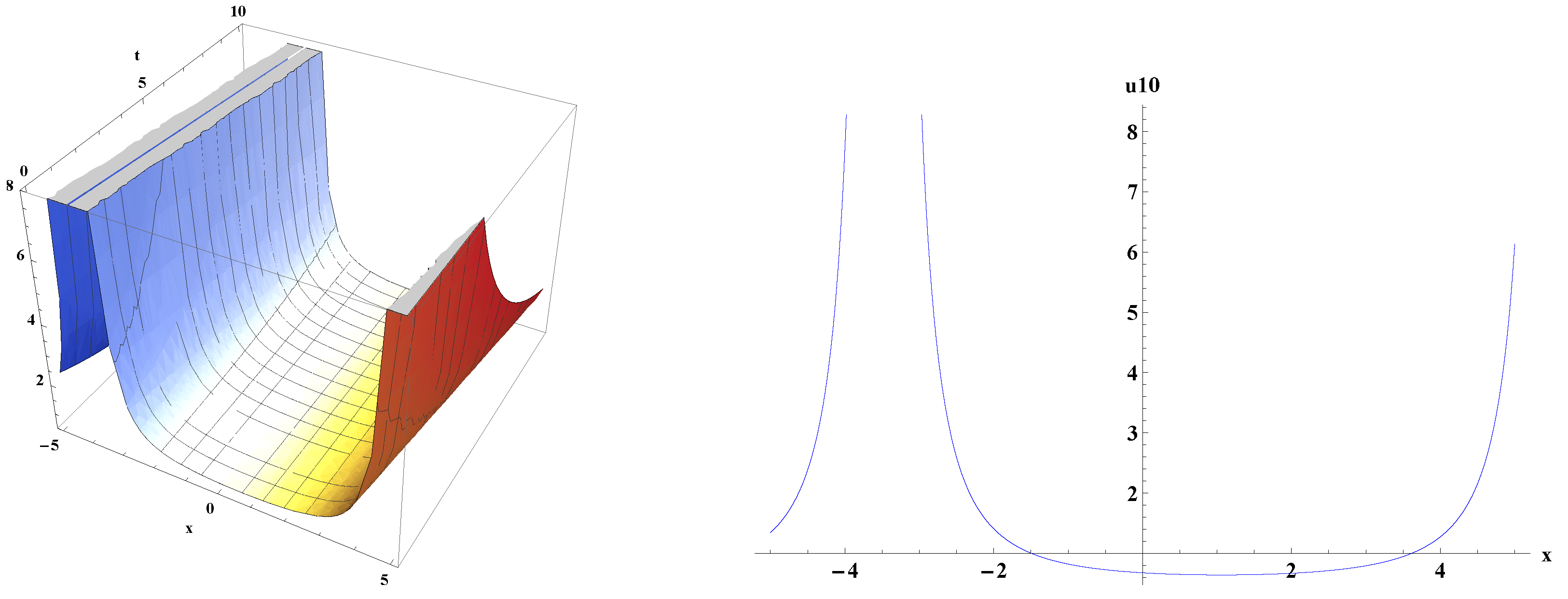
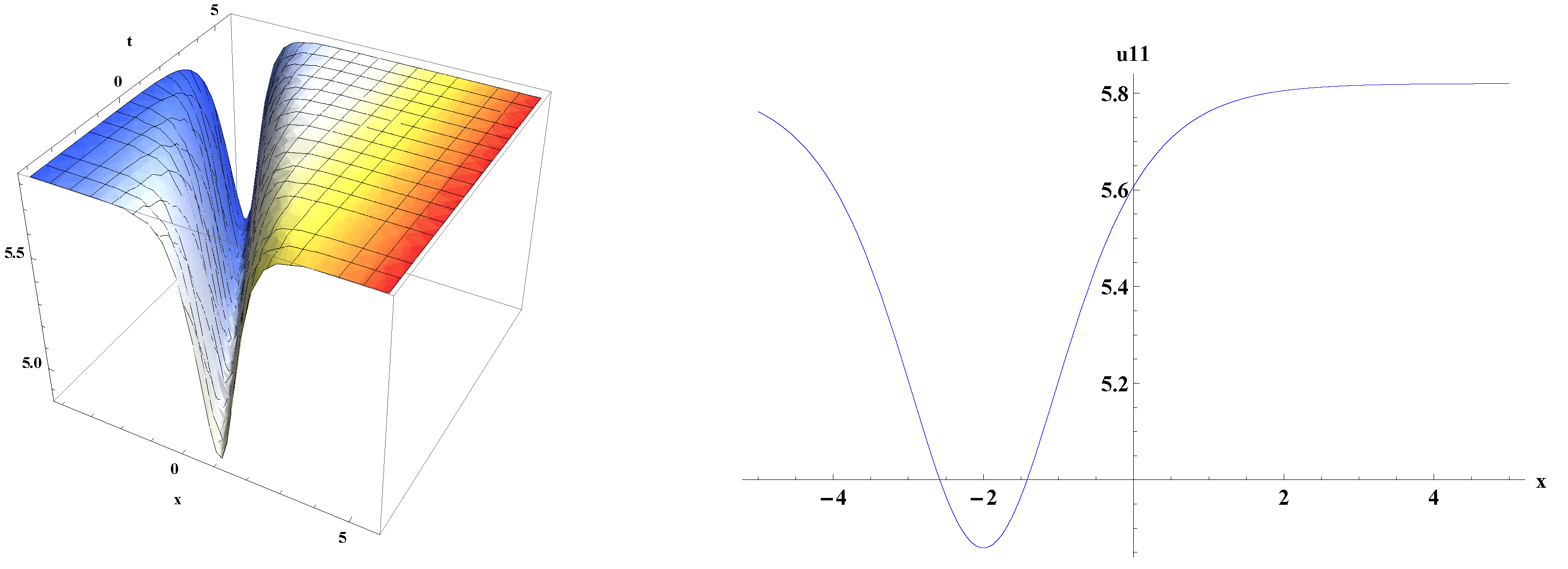
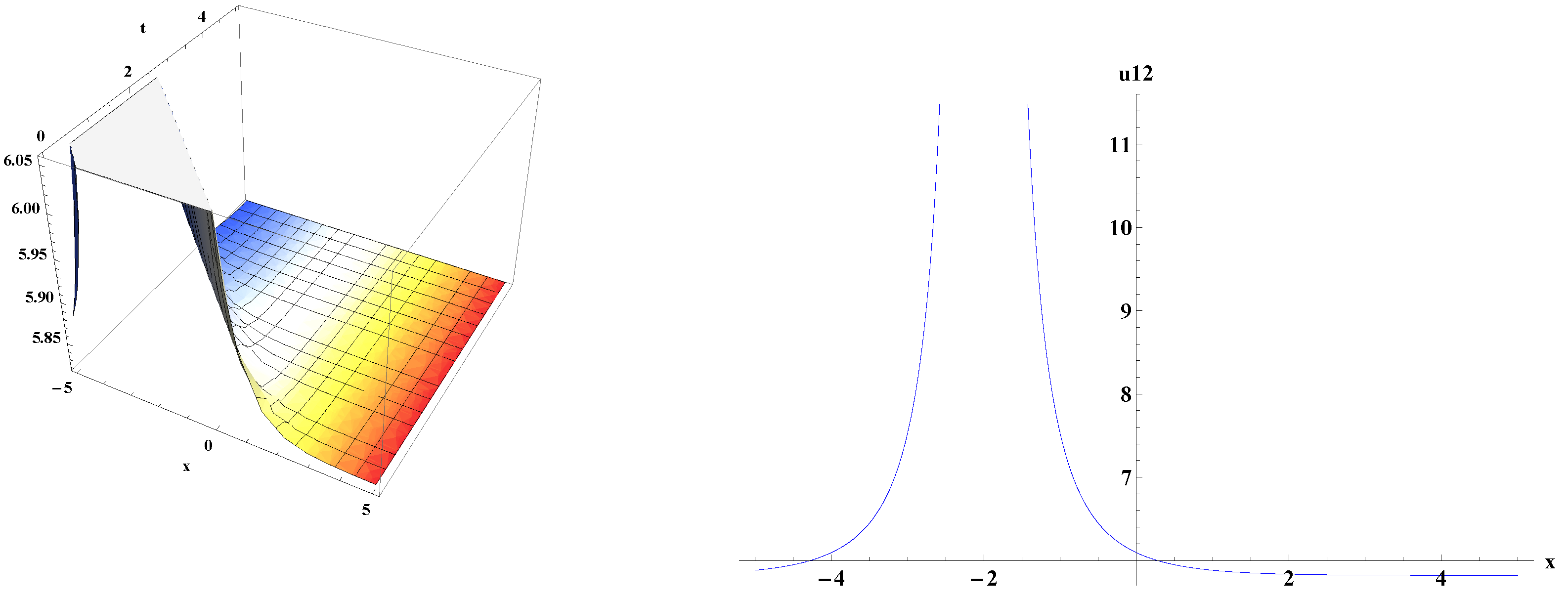
5. Graphical Representations of Traveling Wave Solutions for kp Equation
6. Conclusions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wazwaz, A.M. Partial Differential Equations and Solitary Waves Theorem; Springer: Berlin, Germany, 2009. [Google Scholar]
- Grimshaw, R. The solitary wave in water of variable depth. J. Fluid Mech. 1970, 42, 639–656. [Google Scholar] [CrossRef]
- Baleanu, D.; Machado, A.T.; Luo, A.C.J. Fractional Dynamics and Control; Springer: Berlin/Heidelberg, Germany, 2012; pp. 49–57. [Google Scholar]
- Boudjehem, B.; Boudjehem, D. Parameter tuning of a fractional-order PI Controller using the ITAE Criteria. In Fractional Dynamics Control; Springer: New York, NY, USA, 2011; pp. 49–57. [Google Scholar]
- Alotaibi, H. Developing Multiscale Methodologies for Computational Fluid Mechanics. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2017. [Google Scholar]
- Wazwaz, A.M. New Solitary Wave Solutions to the Modified Forms of Degasperis-prcesi and Cassama-Holm Equations. Appl. Math. Comput. 2007, 186, 130–141. [Google Scholar]
- Gardner, G.S.; Greene, J.M.; Kruskal, M.D.; Mimura, R.M. Method for solving the Korteweg-de-Vries equations. Phys. Rev. Lett. 1967, 19, 1095. [Google Scholar] [CrossRef]
- Abd-el-Malek, M.B.; Amin, A.M. New exact solutions for solving the initial-value-problem of the KdV-KP equation via the Lie group method. Appl. Math. Comput. 2015, 261, 408–418. [Google Scholar] [CrossRef]
- Abbasbandy, S. Numerical solutions of nonlinear Klein-Gordon equation by variational iteration method. Int. J. Numer. Meth. Eng. 2007, 70, 876–881. [Google Scholar] [CrossRef]
- Wazwaz, A.M. A sine-cosine method for handling nonlinear wave equations. Appl. Math. Comput. 2004, 40, 499–508. [Google Scholar]
- Abdou, M.A. The extended tanh-method and its applications for solving nonlinear physical models. Appl. Math. Comput. 2007, 190, 988–996. [Google Scholar] [CrossRef]
- Sirendaoreji. New exact traveling wave solutions for the Kawahara and modified Kawahara equations. Chaos Solitons Fractals 2004, 19, 147–150. [Google Scholar] [CrossRef]
- Akbar, M.A.; Ali, N.H.M. New solitary and periodic solutions of nonlinear evolution equation by exp-function method. World Appl. Sci. J. 2012, 12, 1603–1610. [Google Scholar]
- He, J.H.; Wu, X.H. Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 2006, 30, 700–708. [Google Scholar] [CrossRef]
- Khan, K.; Akbar, M.A. Application of (exp(−ϕ(ξ)))-expansion method to find the exact solutions of modified Benjamin-Bona-Mahony equation. World Appl. Sci. J. 2013, 10, 1373–1377. [Google Scholar]
- Wu, L.; Chen, S.; Pang, C. Traveling wave solution for Generalized Drinfeld-Sokolov equations. Appl. Math. Model. 2009, 33, 4126–4130. [Google Scholar] [CrossRef]
- Zhang, F.; Qi, J.M.; Yuan, W.J. Further results about traveling wave exact solutions of the Drinfeld-Sokolov equations. J. Appl. Math. 2013, 2013, 523732. [Google Scholar] [CrossRef]
- Kaplan, M.; Bekir, A.; Akbulut, A. A generalized Kudryashov method to some nonlinear evolution equations in mathematical physics. Nonlinear Dyn. 2016, 85, 2843–2850. [Google Scholar] [CrossRef]
- Zayed, E.M.; Shohib, R.M.; Alngar, M.E. New extended generalized Kudryashov method for solving three nonlinear partial differential equations. Nonlinear Anal. Model. Control 2020, 25, 598–617. [Google Scholar] [CrossRef]
- Alotaibi, H. Traveling Wave Solutions to the Nonlinear Evolution Equation Using Expansion Method and Addendum to Kudryashov’s Method. Symmetry 2021, 13, 2126. [Google Scholar] [CrossRef]
- Gepreel, K.A. Exact Soliton Solutions for Nonlinear Perturbed Schrödinger Equations with Nonlinear Optical Media. Appl. Sci. 2020, 10, 8929. [Google Scholar] [CrossRef]
- Zhong, B.; Jiang, J.; Feng, Y. New exact solutions of fractional Boussinesq-like equations. Commun. Optim. Theory 2020, 1–17. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Gepreel, K.A.; El-Horbaty, M.; Biswas, A.; Yıldırım, Y.; Alshehri, H.M. Highly Dispersive Optical Solitons with Complex Ginzburg-Landau Equation Having Six Nonlinear Forms. Mathematics 2021, 9, 3270. [Google Scholar] [CrossRef]
- Laouini, G.; Amin, A.M.; Moustafa, M. Lie Group Method for Solving the Negative-Order Kadomtsev–Petviashvili Equation (nKP). Symmetry 2021, 13, 224. [Google Scholar] [CrossRef]
- Johnson, R.S. Water waves and Korteweg-de Vries equations. J. Fluid Mech 1980, 97, 701–719. [Google Scholar] [CrossRef]
- Demiray, H. Weakly nonlinear waves in water of variable depth: Variable-coefficient Korteweg-de Vries equation. Comput. Math. Appl. 2010, 60, 1747–1755. [Google Scholar] [CrossRef]
- Khan, K.; Akbar, M.A. Exact traveling wave solutions of Kadomtsev–Petviashvili equation. J. Egypt. Math. Soc. 2015, 23, 278–281. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Yan, Z.; Zhang, H. New explicit solitary wave solutions for (2+1)-dimensional Boussinesq equation and (3+1)-dimensional KP equation. Phys. Lett. 2003, 307, 107–113. [Google Scholar] [CrossRef]
- Roshid, M.M.; Roshid, H.O. Exact and explicit traveling wave solutions to two nonlinear evolution equations which describe incompressible viscoelastic Kelvin-Voigt fluid. Heliyon 2018, 4, e00756. [Google Scholar] [CrossRef] [Green Version]
- El-Sayed, S.M.; Kaya, D. The decomposition method for solving (2+1)-dimensional Boussinesq equation and (3+1)-dimensional KP equation. Appl. Math. Comput. 2004, 157, 523–534. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh-coth method. Appl. Math. Comput. 2007, 190, 633–640. [Google Scholar] [CrossRef]
- Moslem, W.M.; Abdelsalam, U.M.; Sabry, R.; El-Shamy, E.F.; El-Labany, S.K. Three-dimensional cylindrical Kadomtsev–Petviashvili equation in a dusty electronegative plasma. J. Plasma Phys. 2010, 76, 453–466. [Google Scholar] [CrossRef]
- Li, W.-A.; Chen, H.; Zhang, G.-C. The (w/g)-expansion method and its application to Vakhnenko equation. Chin. Phys. B 2009, 18, 400. [Google Scholar]
- Wang, M.; Li, X.; Zhang, J. The (G′/G)-expansion method and traveling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. 2008, 372, 417–423. [Google Scholar] [CrossRef]
- Attia, M.T.; Elhanbaly, A.; Abdou, M.A. New exact solutions for isothermal magne to static atmospheres equations. Walailak J. Sci. Technol. 2014, 12, 961–973. [Google Scholar]
- Wang, M.; Li, X.Z. Extended F-expansion method and periodic wave solutions for the generalized Zakharov equations. Phys. Lett. A 2005, 343, 48–54. [Google Scholar] [CrossRef]
- Gepreel, K.A. Exact solutions for nonlinear integral member of Kadomtsev–Petviashvili hierarchy differential equations using the modified (w/g)-expansion method. Comput. Math. Appl. 2016, 72, 2072–2083. [Google Scholar] [CrossRef]
- Abdusalam, H.A. On an improved complex tanh-function method. Int. J. Nonlinear Sci. Numer. Simul. 2005, 6, 99–106. [Google Scholar] [CrossRef]
- Zayed, E.M.; Zedan, H.A.; Gepreel, K.A. Group analysis and modified extended Tanh- function to find the invariant solutions and soliton solutions for nonlinear Euler equations. Int. J. Nonlinear Sci. Numer. Simul. 2004, 5, 221–234. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 2020, 206, 163550. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Alngar, M.E.M.; Biswas, A.; Kara, A.H.; Ekici, M.; Alzahrani, A.K.; Belic, M.R. Cubicquartic optical solitons and conservation laws with Kudryashov’s sextic power-law of refractive index. Optik 2021, 227, 166059. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alotaibi, H. Explore Optical Solitary Wave Solutions of the kp Equation by Recent Approaches. Crystals 2022, 12, 159. https://doi.org/10.3390/cryst12020159
Alotaibi H. Explore Optical Solitary Wave Solutions of the kp Equation by Recent Approaches. Crystals. 2022; 12(2):159. https://doi.org/10.3390/cryst12020159
Chicago/Turabian StyleAlotaibi, Hammad. 2022. "Explore Optical Solitary Wave Solutions of the kp Equation by Recent Approaches" Crystals 12, no. 2: 159. https://doi.org/10.3390/cryst12020159
APA StyleAlotaibi, H. (2022). Explore Optical Solitary Wave Solutions of the kp Equation by Recent Approaches. Crystals, 12(2), 159. https://doi.org/10.3390/cryst12020159