1. Introduction
At high temperatures, polycrystalline solids exhibit creep—a slow, phenomenologically viscous flow. The basic deformation mechanisms are either directly or indirectly associated with vacancy diffusion [
1,
2]. In purely diffusional creep, the prominent feature is the lattice growth/loss at the boundaries [
3,
4,
5]. A common view of dislocation creep is that deformation is accomplished by climb-assisted glide [
6], whereby climb only assists in bypassing the obstacles and contributes little to the overall deformation. The climb-only deformation mechanism has been proposed early [
7], but the experimental evidence has been accumulating slowly. The climb appears to be a standalone deformation mechanism producing (under some conditions) significant creep strains in:
hcp metals [
8], intermetallics and superalloys [
9], quasicrystals [
10], and the Earth’s lower mantle rocks under high pressure and high temperature conditions [
11]. Moreover, the interactions of dislocations and vacancies are of particular importance in irradiated metals [
12]. In view of the uncertainties in the proposed mechanisms for high temperature creep, it seems reasonable to aim at a mathematical model that can describe the concurrent operation of glide, climb, and diffusion, with each mechanism contributing significant strains. This is the purpose of the present communication.
1.1. Mass Continuum
The standard mathematical definition of the continuum begins with the statement: At instant material point (element) currently at the position is moving with the velocity . This brings up the question—what is the physical meaning of the material? In fluid mechanics treatises, the answer is typically mathematical rather than physical; material is identified with mass. Such continuum will be called mass continuum (Quantities and operators specific to the mass continuum are marked with an overbar to distinguish them from their analogues in the lattice continuum.).
Specifically, the mass density field
is convected with the velocity
. Owing to the continuous mixing of fluid atoms, the material (point) is not associated with a specific (group of) atom(s). In single- or multi-component fluids, the barycentric velocity preserves the linear momentum of the assembly of atoms (e.g., [
13]), thus yielding (with application of the transport theorem) the simple and elegant continuum version of Newton’s 2nd law—the Cauchy equations of motion:
The operator ∇ is the gradient operator,
is the Cauchy stress (in the mass continuum),
is the gravitational acceleration and
is the material derivative (in the mass continuum). The equations of motion (1) also indicate why the mass density (among all other continuum fields) plays a special role. Further, in the absence of nuclear reaction, the mass is conserved, so that the continuity equation is identified with the local mass conservation condition:
Finally, we note that all of the above refers to the Eulerian (spatial) description of the continuum. The failure to identify the material with a physical entity renders any Lagrangean (material) description meaningless.
1.2. Lattice Continuum
In solid mechanics problems, where Lagrangean kinematics is essential, such formulation does not stand up to scrutiny, unless one assumes the complete absence of mixing/diffusion, in which case the material point is identified with a particular set of atoms. In crystalline solids, the relevant deformation mechanisms are referred to the crystalline lattice. For example, the plastic slip is produced by the motion of dislocations with respect to the lattice, while the elastic deformation is associated with lattice stretching. Thus, the fundamental developments in crystal elasto-plasticity [
14,
15,
16,
17] are, in fact, based on the
lattice continuum without diffusion, which is equivalent to the mass continuum, so that the nature of the continuum is not emphasized.
In the solid mechanics problems with diffusion, the importance of crystalline lattice was noted early by Larché and Cahn [
18,
19,
20] but in the form of lattice constraint imposed on the otherwise mass-based continuum. Berdichevsky et al. [
21] noted the absence of Lagrangean description in the mass continuum, specifically for the newly grown lattice at the grain boundary.
When diffusion and diffusion-mediated processes control the deformation of solids, the overall deformation process is expected to be quasi-static. The rate of change of linear momentum in (1) is considered negligible, so that the governing mechanical equations are the equilibrium conditions. The need for equivalence of atomic and continuum linear momenta being thus eliminated, the lattice continuum formulation becomes natural. Elements of the lattice continuum were introduced by Garikipati et al. [
22], but the full formulation of the lattice continuum for Nabarro–Herring creep was developed only recently [
23]. It includes the lattice versions of the material derivative and the transport theorem, as well as the definition of Lagrangean coordinates for the newly created lattice. The limitation of this formulation is that lattice growth/loss is confined to the grain boundary; in the bulk of the crystal, the lattice version of the continuity equation is equivalent to the local conservation of lattice density. In this paper, we extend the formulation to the problem of dislocation climb, whereby climbing edge dislocations serve as the sink/source of the lattice throughout the bulk of the crystal. Thus, the resulting continuum embodies a sink/source of the material. This appears to be an entirely new concept (The analogous mass continuum would be the one where deformation is accompanied by nuclear reaction (mass sink). One can envision such problems arising in case of load bearing nuclear fuel, but this author is not aware of any such developments.).
The problem considered here is the concurrent operation of dislocation glide, climb and vacancy diffusion, the latter two being intrinsically linked. The vacancy diffusion is also inseparable from the lattice growth at grain boundaries (barring awkward assumptions), so that the problem considered is the concurrent operation of dislocation creep and Nabarro–Herring creep. The paper is organized as follows.
In
Section 2, the kinematics of lattice continuum with lattice sink/source, diffusion, dislocation glide and climb is developed. In addition to the lattice sink, the kinematic interaction between glide and climb is a novel element. Power balance (for an isothermal process) is formulated in
Section 3. In
Section 4, the weak form of the problem is formulated directly from the power balance using the principle of virtual power, followed by the strong form. While many components of the strong form turn out to be familiar from the literature, the glide-climb interaction is a novel concepts and is discussed in some detail. The conclusions are given in
Section 5.
2. Kinematics
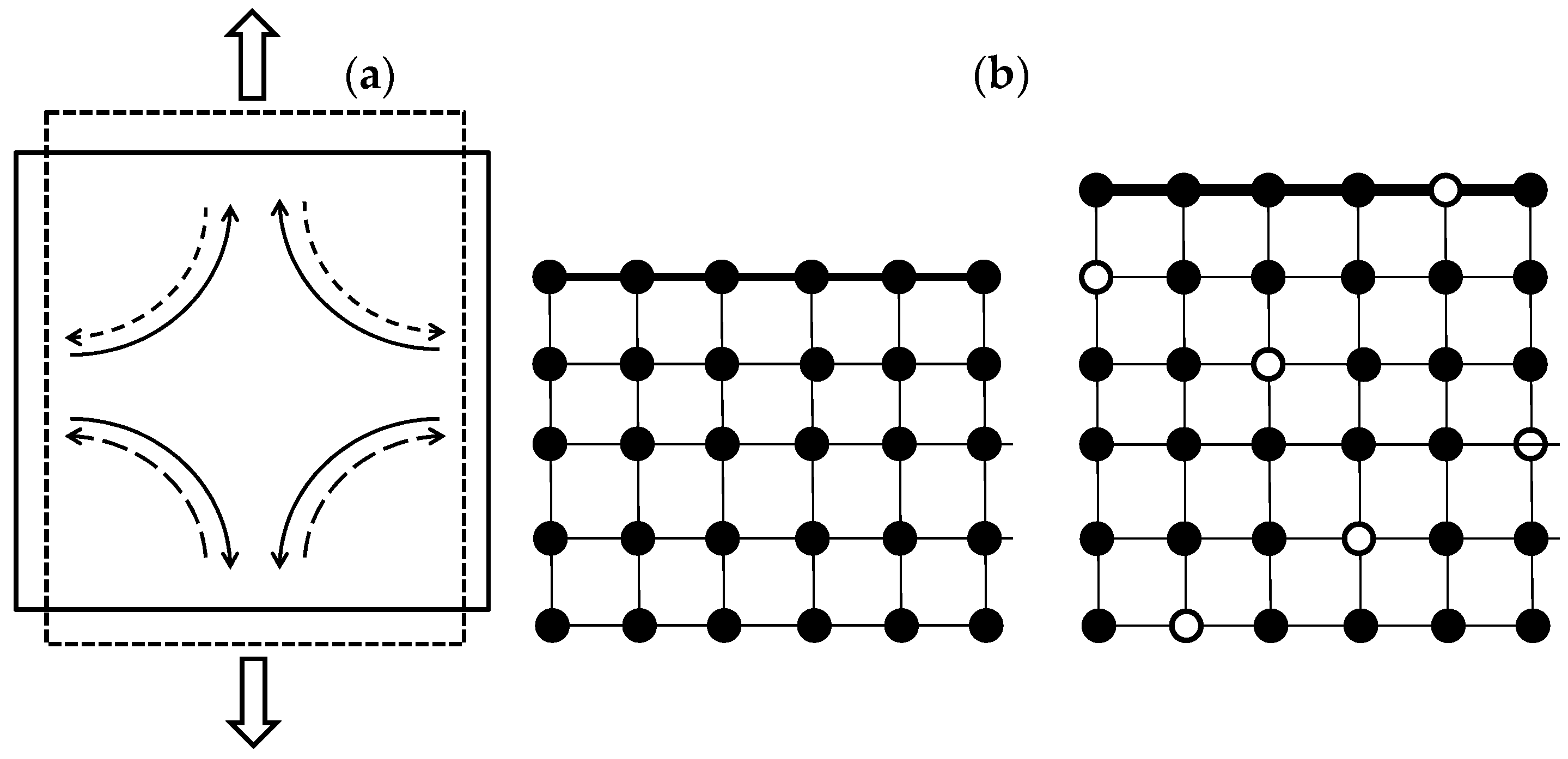
At high temperatures, vacancy diffusion takes place by the vacancy-atom exchange mechanism, thus producing the complementary fluxes of atoms and vacancies. Crystal boundaries serve as sources and sinks of vacancies resulting in lattice growth/loss on the boundary faces under tension/compression. The diffusion and lattice growth in the Nabarro–Herring creep is illustrated in
Figure 1. The lattice continuum corresponding to the Nabarro–Herring creep has been formulated [
23] and includes the Eulerian and Lagrangean descriptions of the newly formed lattice.
We consider two species occupying lattice sites: atoms and vacancies; without interstitials. At any instant
t, the lattice velocity field
is defined on an open domain
, its closure
having the outer normal
. The lattice velocity gradient
is defined as:
2.1. Dislocation Climb and the Continuity Equation
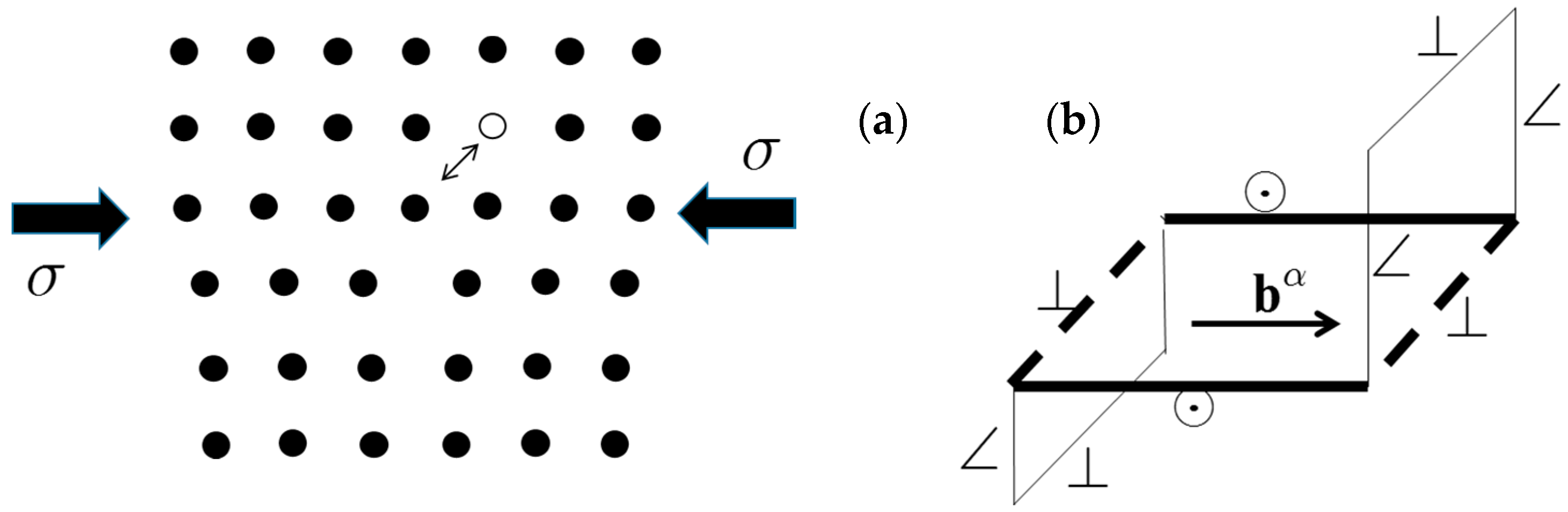
The mechanism of dislocation climb consists of vacancy absorption by the dislocation core. As the vacancy is absorbed, the core of edge dislocation moves one atomic space and one lattice position is lost. Thus, the dislocation climb mechanism, illustrated in
Figure 2a, represents the lattice sink, as well as the vacancy sink. Therefore, the continuity equation, i.e., the lattice balance law, must now include—not only the convection of lattice sites, but also the local sink strength. Let the lattice site density be
and let
be the fraction of lattice sites lost per unit time. Then:
with reference to
Figure 2a, it is clear that there is no kinematic constraint restricting the climb motion to one direction: dislocation can climb or descend, operating as sink or source of lattice sites and vacancies. The convention adopted here with positive
representing climb/sink conforms to the usual representation of climb in the literature.
The material (lattice) derivative of any material field
is
so that:
The glide of dislocations has been studied in detail, including the interactions between dislocations on different slip systems, as well as dislocation multiplication and strain hardening mechanisms [
24,
25,
26]. Here we focus on dislocation climb and its interactions with dislocation glide.
The slip system
is described by a triad of unit orthogonal vectors: the slip direction
, the slip plane normal
, and
. The evolution of climbing edge dislocations, starting from a rectangular dislocation loop on the slip system
is illustrated in
Figure 2b. Evidently, the climb of original edges produces, not only the parallel edge segments (
), but also the out-of-plane edge segments (
) which cannot glide. Further climb by all edges results in a multiplication mechanism analogous to the Frank–Read source for glide. Let
be the density (length per volume) of all edge dislocations (
and
) associated with the slip system
, and let
be the average climb velocity for edges belonging to the slip system. Then, in analogy with the Orowan equation for the slip rate, the strength of the lattice sink associated with the slip system
is
and the total lattice sink strength is obtained by summation over all slip systems:
2.2. Elastic–Plastic Decomposition
In addition the lattice density
, the material (lattice) point currently located at
, carries the vacancy concentration
, i.e., the fraction of lattice sites occupied by vacancies, and the deformation gradient
:
To extend the definition of lattice-advected variables to the lattice being currently created, it is sufficient to assert the continuity of deformation gradient, vacancy concentration and lattice density, within the crystal [
23]. The key elements of the Lagrangean (spatial) description are thus defined. The reference configuration
can, in principle, be obtained from the current configuration, but it will be fictitious for the lattice grown during the process. The mapping
is multiple-valued, with gaps and overlaps at grain boundaries and inside the grain.
The deformation gradient tensor can be decomposed into the elastic-compositional deformation gradient
, and the plastic deformation gradient
. The former represents the motion which produces a deformed lattice topologically equivalent to the reference lattice, the latter changes the topology, i.e., it accounts for both–glide and climb of dislocations. The decomposition is multiplicative and formally identical to the standard (glide-only) elastic–plastic decomposition [
14]:
However, the plastic gradient now includes the climb deformation, so that
Following the decomposition (10), the velocity gradient (3) is decomposed in elastic-compositional and plastic portions:
The decompositions (10) and (12) reflect the imaginary sequential deformation. First, the reference lattice is deformed to intermediate (isoclinic) configuration without changing the symmetry of the lattice, . In contrast to standard crystal plasticity based on dislocation glide, here the lattice planes are lost/created, resulting in the translational motion of the parts of the lattice, but preserving the lattice symmetries and orientation (hence the attribute isoclinic still applies). Then, the intermediate configuration is transformed into the current configuration, . In the glide-only elasto-plasticity, while the two steps are not represented by 1–1 mappings (i.e., the tensors and are not compatible), the total deformation gradient represents 1–1 mapping This is clearly not the case here: the mapping is multiple-valued and discontinuous. (Note that in the glide-only plasticity, the incompatibility of can be considered as the consequence of incompatibility of , arising from the requirement that the total deformation gradient be compatible. In the absence of dislocation glide , is compatible.)
Let the lattice density and elementary volume in intermediate configuration be
and
. Then, elastic-compositional changes between intermediate and current configurations can be expressed as
Note that we first define all fields (including deformation gradient) in the current configuration, e.g.,
, which is the only configuration where the position vector
represents one and only one material (lattice) point. To minimize the notational clutter, we write
and freely switch the domains of integration between the current and intermediate configurations:
(Although the equality (14) is widely used in the literature on elasto-plasticity, in view of the multiple-valuedness of the mapping , the meaning of the integral on the right is not obvious. The clarifying point is that includes only lattice stretching and rotation so that the mapping of lattice points is 1–1; only the mapping of coordinates is multiple-valued. The function is understood to be defined on lattice points (as opposed to coordinates), with the corresponding interpretation of the integral. In contrast to glide-only plasticity, the analogous transformation to the reference configuration is meaningless here.)
The plastic velocity gradient on intermediate configuration
in (12) accounts for changes in lattice topology and is defined from the elementary slip system state variables: slip rate
and climb rate (lattice sink strength)
:
where the vectors
are unit and orthogonal in the intermediate configuration. The choice between intermediate and current configurations as the basis for definition of slip has been extensively discussed in literature [
15,
16,
17].
2.3. Climb–Glide Interaction
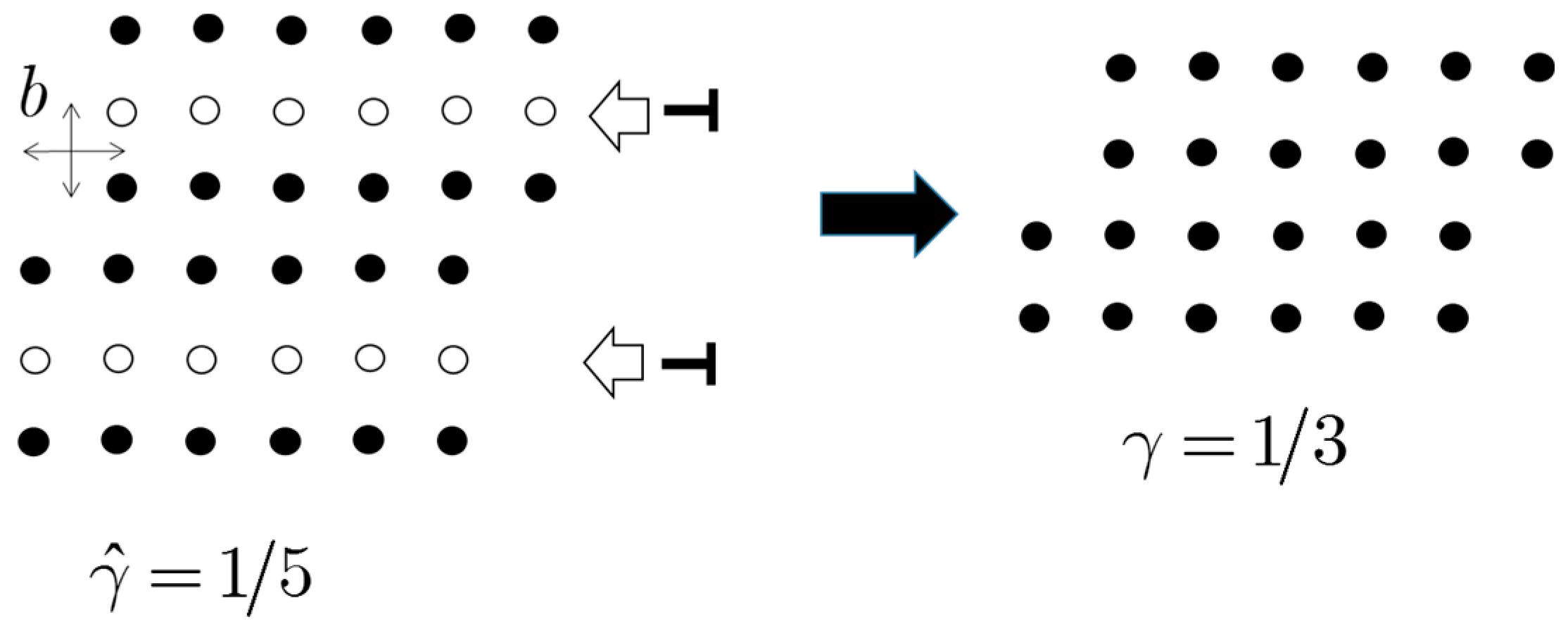
When dislocation climb is present, the scalar fields
have a different physical (geometric) meaning then in the glide-only case, which has implications on the constitutive relations. Define the true slip field
as the slip occurring without any climb. This is the variable that corresponds to the standard crystal plasticity slip field. As illustrated in
Figure 3, the loss of lattice planes parallel to the slip plane affects the effective slip
directly. (An analogous continuum illustration of the same phenomenon is shown in
Figure 4 in
Section 4.) The loss of lattice planes orthogonal to the slip plane only affects the gradient of slip
, which is accounted for implicitly through the loss of lattice (6).
The relation between true slip rate
and effective slip rate
is derived in
Appendix A:
It is the true slip rate
that is related to dislocation glide through the Orowan equation:
and it is on
that power associated with dislocation glide:
is expanded on, by the Peierls–Nabarro stress
[
27,
28]. On the other hand, the effective slip
describes the current kinematic state of the material, taking into account the true slip and the changes in the slip geometry caused by climb.
The plastic velocity gradient in intermediate configuration (15) can now be written as
2.4. Diffusion and Diffusional Creep Rate
The boundaries of the crystal serve as lattice/vacancy sources and sinks. As discussed in [
23], the normal boundary velocity
is a scalar field defined on the closure set
, and independent of the lattice velocity field. The difference in normal components is the lattice growth rate:
The diffusional creep deformation rate tensor is the symmetric rank-2 tensor, constant within each domain
, and defined on the basis of the difference between the normal boundary velocity and the normal lattice velocity at the boundary:
In contrast to the locally-defined (fields defined at each point) deformation rates (elastic-compositional and plastic), the diffusional creep deformation rate is defined for each grain. In a polycrystal it is a piecewise constant field with discontinuities across the grain boundaries. On the level of a single grain (mesoscale lattice continuum), the tensor
C describes the lattice growth at the boundary, not the deformation of the lattice. Only on the polycrystal level (macroscale continuum) the name
creep deformation rate becomes semantically correct. This can be contrasted with the definition of plastic deformation in [
21].
The locally-defined (intrinsic) deformation rates are simply the symmetric parts of local lattice velocity gradients. The grain average of the local lattice velocity gradient can be expressed as
The total deformation rate for the grain is then
In the lattice continuum, the local mass balance results in the vacancy diffusion equation [
23]. The derivation for the case with lattice sink is given in
Appendix B. The diffusion equation reads:
where
is the vacancy flux.
The transport theorem with lattice sink is also derived in
Appendix B. Let the quantity
be given per lattice site. Consider the lattice volume
, i.e., the volume that follows the prescribed set of lattice sites. The transport theorem has the following form:
For a variable crystal domain
, with lattice growing/vanishing at the boundary
with the rate
(20), the transport theorem will have the form:
Applying (26) to the mass density (
Appendix B), the mass of a crystal grain will change as
where
is the atomic mass and
is the normal vacancy flux at the boundary. Thus, if a single grain is to satisfy mass conservation, then:
The weak constraint (28) requires a model for boundary diffusion [
23], which is beyond the scope of this paper. The local condition:
implies absence of boundary diffusion by requiring that lattice growth/disappearance at the boundary be directly related to the normal atomic flux (negative of the vacancy flux). The creep deformation rate can then be written as
4. Principle of Virtual Power and Governing Equations
Following (43), at any instant
t, the fields
are subject to independent variations
, arbitrary except at points where the essential boundary conditions are prescribed (allowable variations). The principle of virtual power provides the weak form of the initial-boundary value problem. The integral equation representing power expanded by actual power conjugates on virtual rates:
must be satisfied for arbitrary allowable variations.
Compared to the problem discussed previously [
23], only the last two terms are new. Nevertheless, we summarize all the components of the strong form implied by (44). The usual manipulation and the argument based on independence of variations yields:
Stress (quasi-) equilibrium with standard boundary conditions:
The diffusion potential
and
, resulting in the coupled, moving-boundary diffusion problem with an unusual boundary condition:
The power conjugate of the true slip rate as the resolved shear stress component of the stress tensor
:
The power conjugate of the climb/sink rate:
With constitutive equations for elasticity, slip rate (41) and climb rate (40), this completes the initial-boundary value problem. The diffusion portion of the problem (46) differs from the previously discussed case [
23] only by the sink term. The resolved shear stress (47) is the standard concept in crystal plasticity. The climb power conjugate (48) requires a more detailed discussion.
The 2nd term in (48), , is the normal (compressive) stress on the plane with normal . Since slip and climb are defined consistently in the intermediate configuration, the relevant stress tensor is . Compression on a lattice plane favors the loss of lattice planes, while the tension favors creation of new planes.
The 3rd term in (48),
, is recognized as the osmotic stress [
29,
30]. It is instructive to consider its linearized version (small elastic-compositional deformation gradient and small vacancy concentration), in conjunction with the regular solution model [
31]. In that case [
23]:
where
is the Boltzman constant,
is the temperature,
and
are the equilibrium vacancy concentrations at the temperature
—the first at zero pressure, the second at the current pressure
The Vegard’s law coefficient
describes the volumetric compositional strain as
.
The last term in (48) simply accounts for the fact that each lattice site carries internal energy. When a lattice site is lost, its internal energy is dissipated. This term is probably negligible in most cases. Compared to the terms , its relative magnitude is of the order of elastic-compositional strains, which is not expected to exceed .
Finally, to understand the first term in (48), consider the case where the only non-zero climb rate is
and the only non-zero slip rate is
. With (17), the power expenditure from the first term in (48) can then be written as
Thus, this term provides the additional power expanded by the resolved shear stress
on the difference between the effective and true slip rates, this difference being the result of the climb
(see
Figure 3). Imagine a (cubic) element loaded by tractions
. The expanded power is
. But the power expanded on glide, i.e., the power expanded by the Peirels–Nabarro stress to move dislocations along the slip plane, is
. The difference is made up for by (50).
Compared to the terms
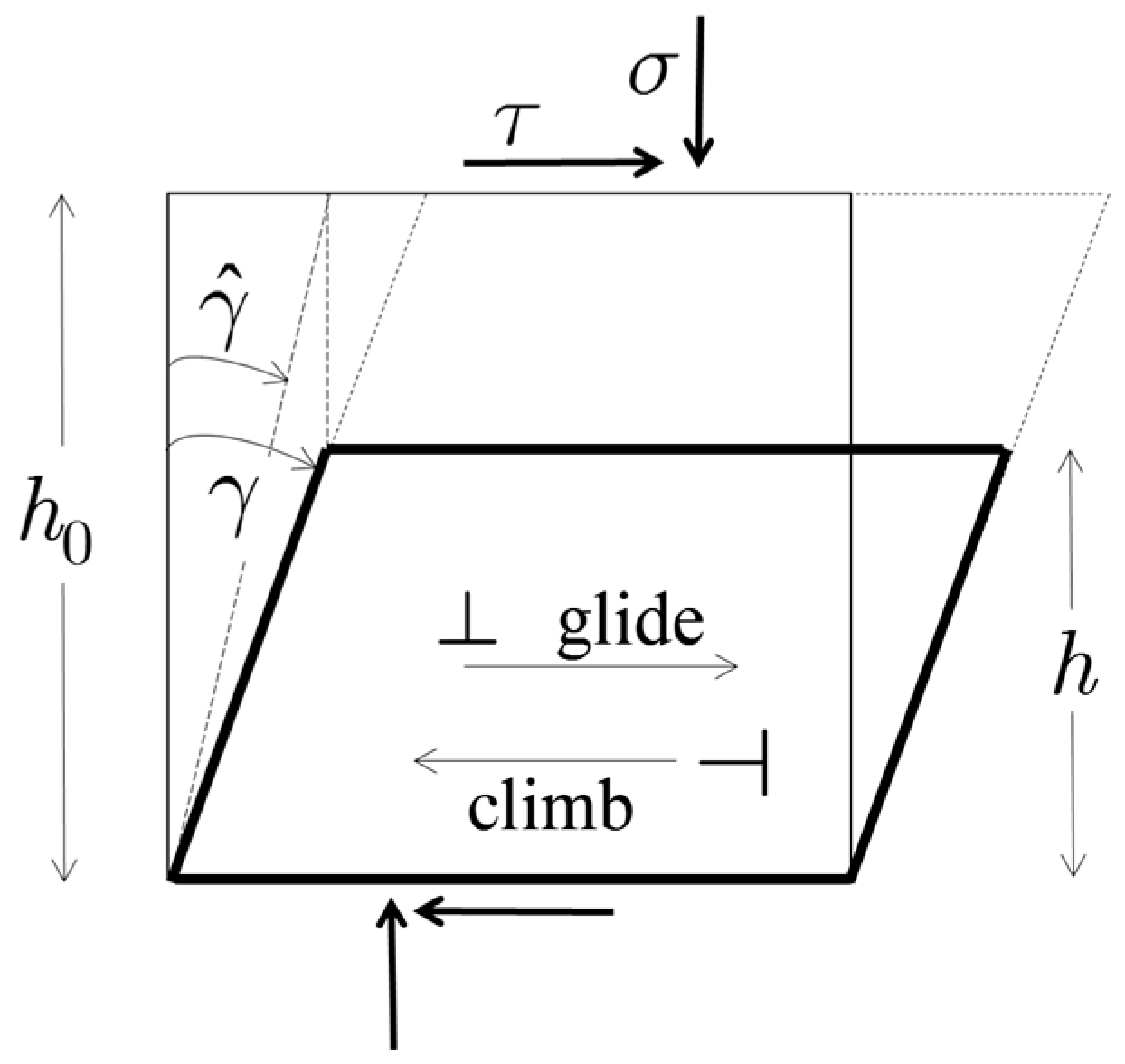
, the relative magnitude of this term is of the order of plastic strains and cannot in general be neglected, except in the initial stages of deformation when plastic strains are small. Its relative importance increases with increasing plastic deformation. This may be puzzling until one recalls that (50) represents power density (i.e., power per unit volume), and that the changes in volume resulting from lattice loss compensate for increasing power density (50). To illustrate this point, consider the example shown in
Figure 4, specifically, the work done and the power expanded by the constant shear stress
.
The total work (per unit area of the constant horizontal base) is
. The power is
where we have used
.
Assume ideal plasticity without hardening and constant rates of true slip
, and climb
(Constant climb rate in this example is not realistic. To sustain the climb rate, vacancies would have to be injected into the crystal at a prohibitive energetic cost. This is ignored in the idealized example, intended only to illustrate the thermodynamics aspect of climb–glide interaction.) Upon solving
, we obtain unbounded exponential increase in effective slip and the slip work density:
However, with
, the total work (per unit base area) is bounded:


{kind=link}
{kind=link}
{kind=link}
{kind=link}



