Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Material and Methods
2.1. Materials
2.2. Formation of Ionic Electroactive Materials
2.2.1. Multiwall Carbon Nanotube/Carbide-Derived Carbon (MWCNT-CDC) Fiber
2.2.2. Polypyrrole Doped with Dodecylbenzene-Sulfonate (PPy/DBS)
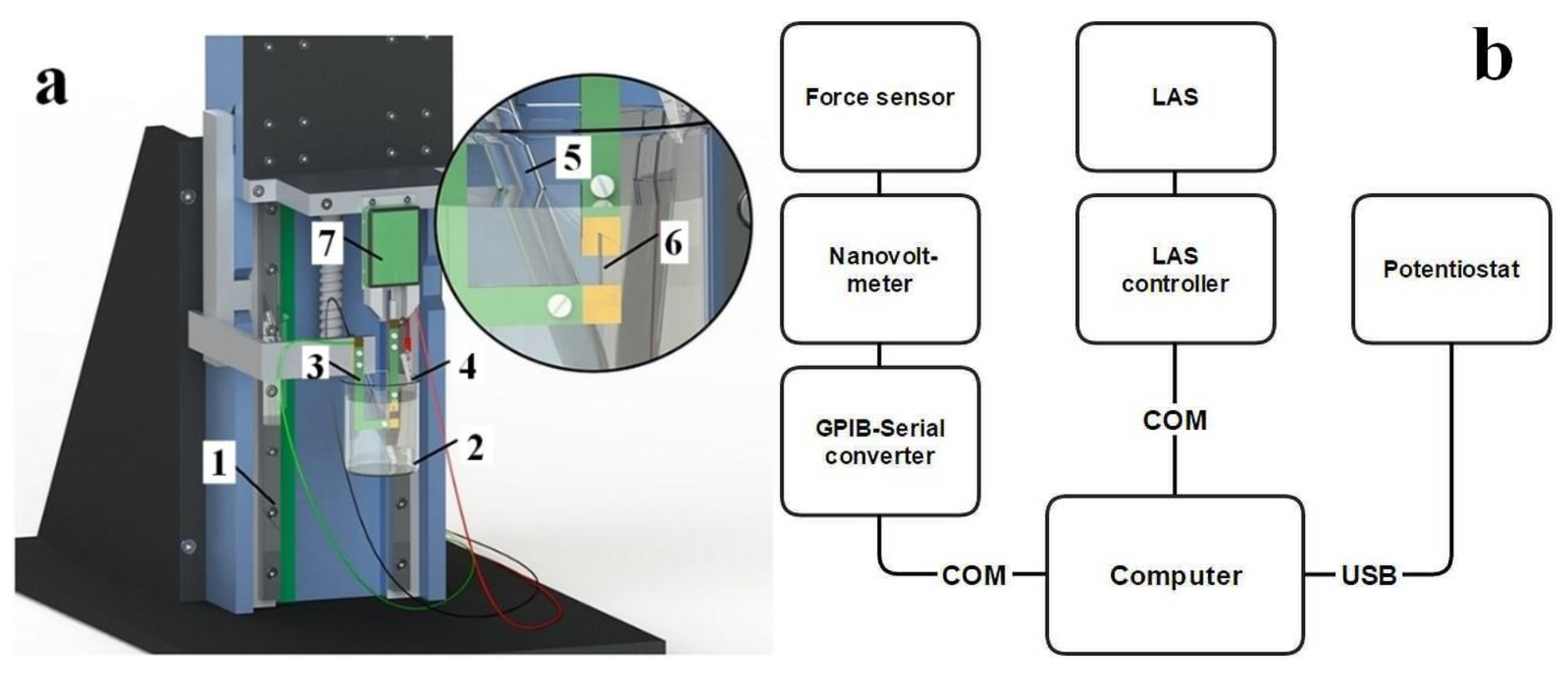
2.3. Linear Muscle Analyzer Set up
Characterization of the Materials
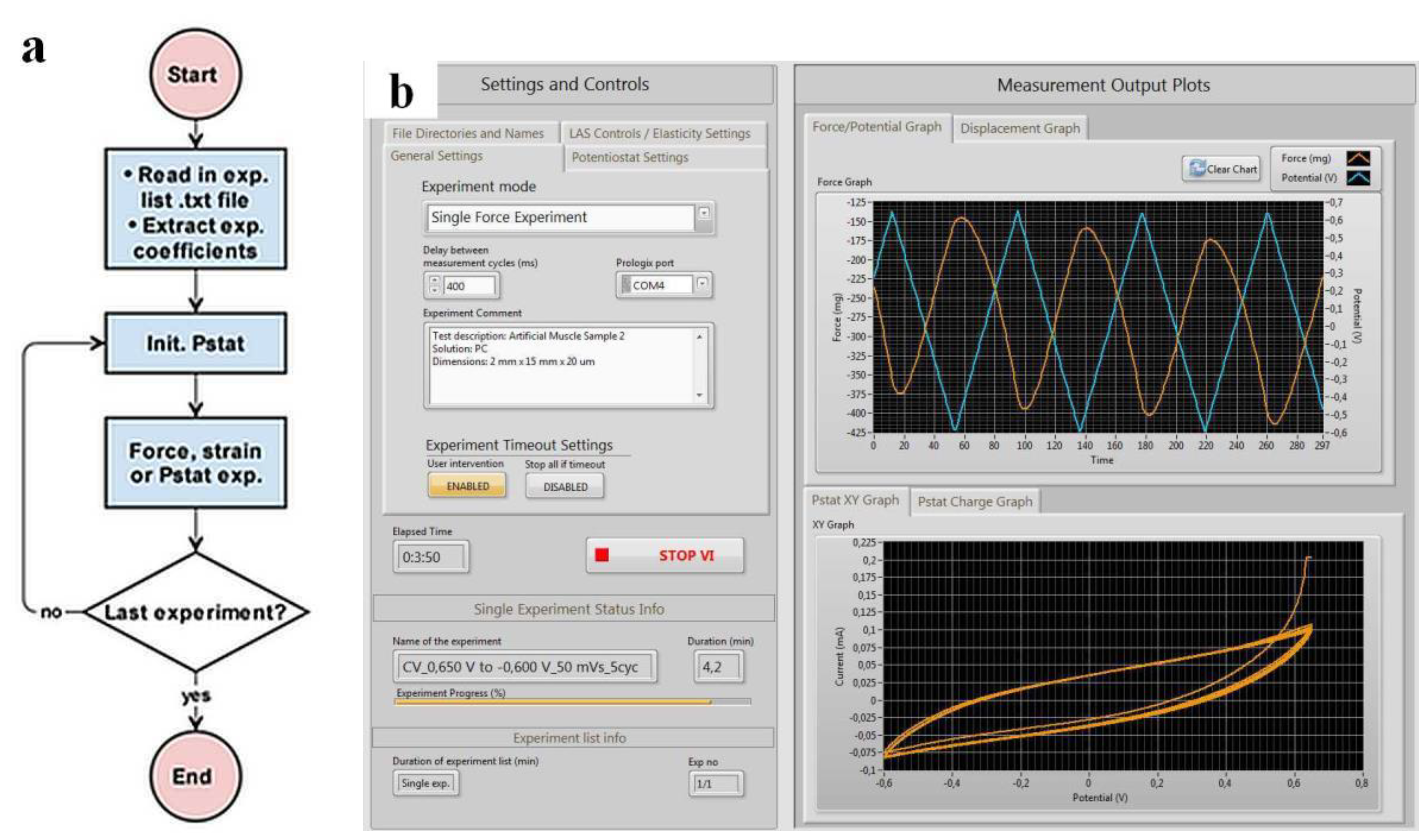
2.4. Linear Muscle Analyzer Software Description
2.4.1. Calibration of the Force Sensor
2.4.2. Elasticity Measurements
2.4.3. Initialization and Experiments with the Potentiostat
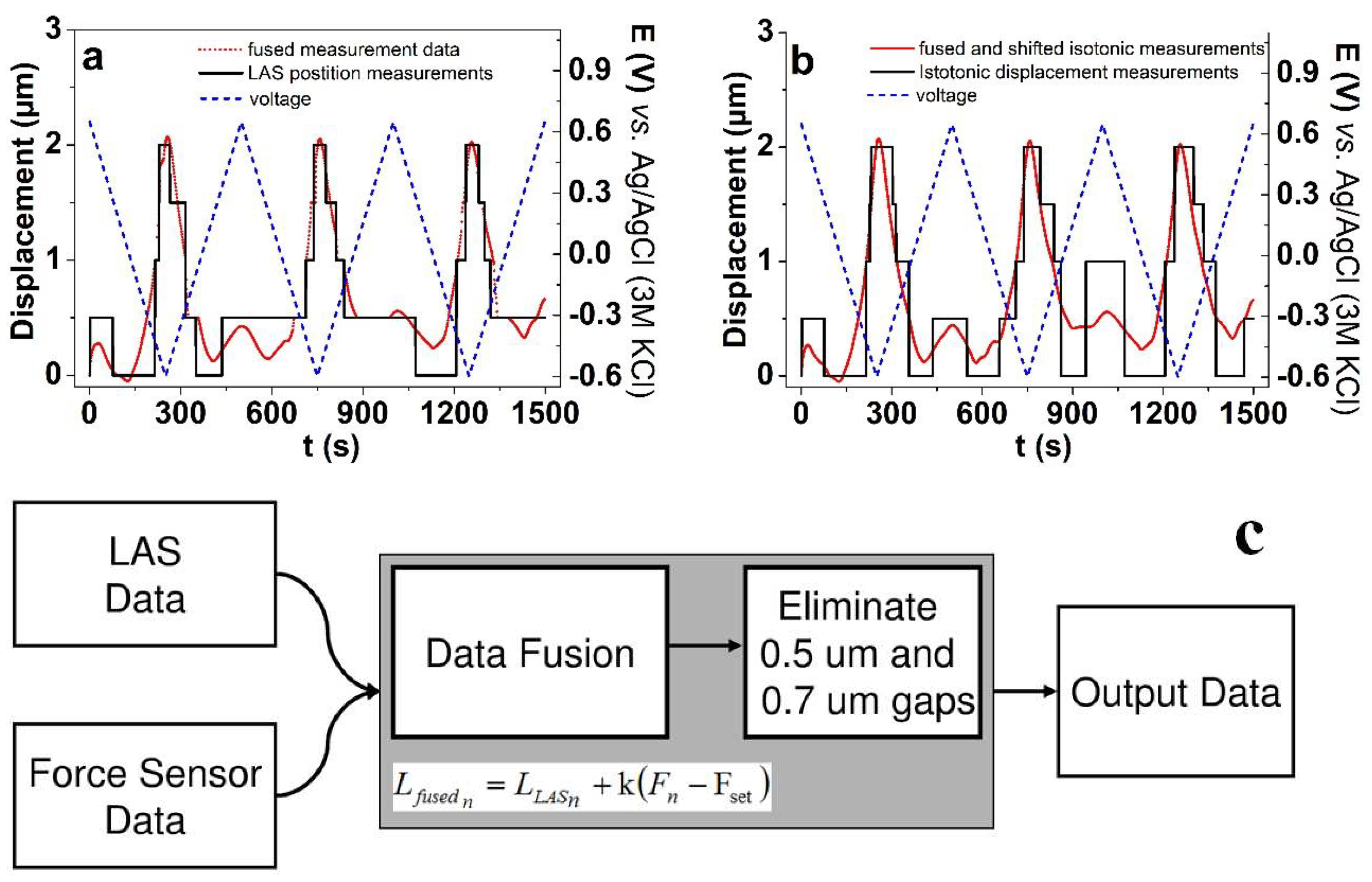
2.4.4. Strain and Stress Measurements
3. Results on Model Systems and Discussion
3.1. Characterization of Ionic Actuator Materials
3.2. High Signal-to-Noise Ratio Isotonic and Isometric Measurements
3.3. Low signal-to-Noise Ratio (SNR) Isotonic Measurements
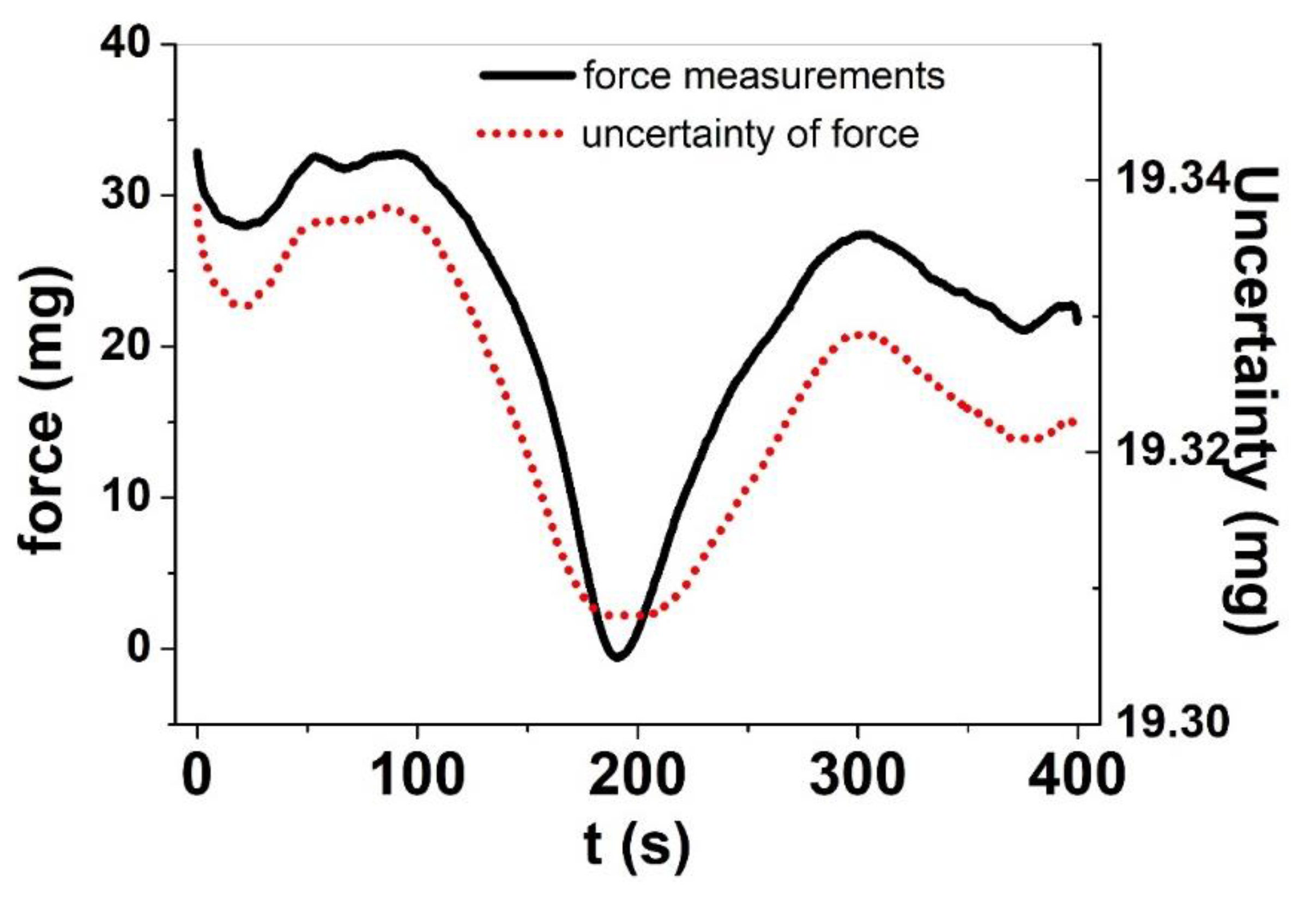
3.4. Uncertainty Evaluation
4. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Kosidlo, U.; Omastová, M.; Micusík, M.; Ćirić-Marjanović, G.; Randriamahazaka, H.; Wallmersperger, T.; Aabloo, A.; Kolaric, I.; Bauernhansl, T. Nanocarbon based ionic actuators—A review. Smart Mater. Struct. 2013, 22, 104022. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Yan, B.; Wu, Y.; Guo, L. Recent advances on polypyrrole electroactuators. Polymers 2017, 9, 446. [Google Scholar] [CrossRef] [PubMed]
- Daneshmand, M.; Abels, A.; Anbarjafari, G. Real-time, automatic digi-tailor mannequin robot adjustment based on human body classification through supervised learningNo Title. Int. J. Adv. Robot. Syst. 2017, 13, 1–9. [Google Scholar]
- Maziz, A.; Concas, A.; Khaldi, A.; Stålhand, J.; Persson, N.-K.; Jager, E.W.H. Knitting and weaving artificial muscles. Sci. Adv. 2017, 3, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Torop, J.; Aabloo, A.; Jager, E.W.H. Novel actuators based on polypyrrole/carbide-derived carbon hybrid materials. Carbon N. Y. 2014, 80, 387–395. [Google Scholar] [CrossRef]
- Le, T.H.; Kim, Y.; Yoon, H. Electrical and electrochemical properties of conducting polymers. Polymers 2017, 9, 150. [Google Scholar] [CrossRef]
- Tomczykowa, M.; Plonska-Brzezinska, M. Conducting Polymers, Hydrogels and Their Composites: Preparation, Properties and Bioapplications. Polymers 2019, 11, 350. [Google Scholar] [CrossRef]
- Cortés, M.T.; Moreno, J.C. Artificial muscles based on conducting polymers. e-Polymers 2003, 3, 1–42. [Google Scholar]
- Plaado, M.; Kaasik, F.; Valner, R.; Lust, E.; Saar, R.; Saal, K.; Peikolainen, A.; Aabloo, A.; Kiefer, R. Electrochemical actuation of multiwall carbon nanotube fiber with embedded carbide-derived carbon particles. Carbon N. Y. 2015, 94, 911–918. [Google Scholar] [CrossRef]
- Martinez, J.G.; Otero, T.F.; Jager, E.W.H. Effect of the electrolyte concentration and substrate on conducting polymer actuators. Langmuir 2014, 30, 3894–3904. [Google Scholar] [CrossRef] [PubMed]
- Kiefer, R.; Martinez, J.G.; Kesküla, A.; Anbarjafari, G.; Aabloo, A.; Otero, T.F. Chemical Polymeric actuators: Solvents tune reaction-driven cation to reaction-driven anion actuation. Sens. Actuar. B. Chem. 2016, 233, 328–336. [Google Scholar] [CrossRef]
- Kivilo, A.; Zondaka, Z.; Kesküla, A.; Rasti, P.; Tamm, T.; Kiefer, R. Electro-chemo-mechanical deformation properties of polypyrrole/dodecylbenzenesulfate linear actuators in aqueous and organic electrolyte. RSC Adv. 2016, 6, 69–75. [Google Scholar] [CrossRef]
- Zhang, H.; Tang, J.; Zhu, P.; Ma, J.; Qin, L.C. High tensile modulus of carbon nanotube nano-fibers produced by dielectrophoresis. Chem. Phys. Lett. 2009, 478, 230–233. [Google Scholar] [CrossRef]
- Bard, A.J.; Faulkner, L.R. Fundamentals and applications. Electrochem. Methods 2001, 2, 482. [Google Scholar]
- Baughman, R.H.; Cui, C.; Zakhidov, A.A.; Iqbal, Z.; Barisci, J.N.; Spinks, G.M.; Wallace, G.G.; Mazzoldi, A.; De Rossi, D.; Rinzler, A.G.; et al. Carbon nanotube actuators. Science 1999, 284, 1340–1344. [Google Scholar] [CrossRef] [PubMed]
- Hantel, M.M.; Presser, V.; Kötz, R.; Gogotsi, Y. In situ electrochemical dilatometry of carbide-derived carbons. Electrochem. Commun. 2011, 13, 1221–1224. [Google Scholar] [CrossRef]
- Torop, J.; Arulepp, M.; Leis, J.; Punning, A.; Johanson, U.; Palmre, V.; Aabloo, A. Nanoporous Carbide-Derived Carbon Material-Based Linear Actuators. Materials 2010, 3, 9–25. [Google Scholar] [CrossRef]
- Carpi, F.; Chiarelli, P.; Mazzoldi, A.; De Rossi, D. Electromechanical characterisation of dielectric elastomer planar actuators: Comparative evaluation of different electrode materials and different counterloads. Sens. Actuar. A Phys. 2003, 107, 85–95. [Google Scholar] [CrossRef]
- Spinks, G.M.; Xi, B.; Zhou, D.; Truong, V.T.; Wallace, G.G. Enhanced control and stability of polypyrrole electromechanical actuators. Synth. Met. 2004, 140, 273–280. [Google Scholar] [CrossRef]
- Spinks, G.M.; Liu, L.; Wallace, G.G.; Zhou, D. Strain response from polypyrrole actuators under load. Adv. Funct. Mater. 2002, 12, 437–440. [Google Scholar] [CrossRef]
- Kaneto, K.; Fujisue, H.; Kunifusa, M.; Takashima, W. Conducting polymer soft actuators based on polypyrrole films—Energy conversion efficiency. Smart Mater. Struct. 2007, 16, S250–S255. [Google Scholar] [CrossRef]
- Madden, J.D.; Cush, R.A.; Kanigan, T.S.; Brenan, C.J.; Hunter, I.W. Encapsulated polypyrrole actuators. Synth. Met. 1999, 105, 61–64. [Google Scholar] [CrossRef]
- Madden, J.D.; Rinderknecht, D.; Anquetil, P.A.; Hunter, I.W. Creep and cycle life in polypyrrole actuators. Sens. Actuar. A Phys. 2007, 133, 210–217. [Google Scholar] [CrossRef]
- Xiao, T.; Ren, Y.; Liao, K.; Wu, P.; Li, F.; Cheng, H.M. Determination of tensile strength distribution of nanotubes from testing of nanotube bundles. Compos. Sci. Technol. 2008, 68, 2937–2942. [Google Scholar] [CrossRef]
- ADInstruments. Available online: https://www.adinstruments.com/products/labchart (accessed on 16 June 2019).
- Scientific, A. Available online: https://aurorascientific.com/products/muscle-physiology/muscle-software/dynamic-muscle-control/ (accessed on 16 June 2019).
- Panlab. Available online: https://www.panlab.com/en/products/protowin-software-panlab (accessed on 16 June 2019).
- Della Santa, A.; De Rossi, D.; Mazzoldi, A. Performance and work capacity of a polypyrrole conducting polymer linear actuator. Synth. Met. 1997, 90, 93–100. [Google Scholar] [CrossRef]
- Instruments, N. Available online: http://www.ni.com/labview/ (accessed on 16 June 2019).
- Scientific, A. Available online: https://aurorascientific.com/products/muscle-physi (accessed on 16 June 2019).
- Software, Acquisition, ACAD® Isolated Tissue Data. Available online: https://www.harvardapparatus.co.uk/webapp/wcs/stores/servlet/product_11555_10001_52805_-1_HAUK_ProductDetail__ (accessed on 16 June 2019).
- Valner, R. Software Development for Isotonic and Isometric Electro- Chemo Measurement System. 2015. Available online: https://pdfs.semanticscholar.org/551f/09a5410462ac9bb339ead3864c29af94468b.pdf (accessed on 16 June 2019).
- Christophersen, M.; Shapiro, B.; Smela, E. Characterization and modeling of PPy bilayer microactuators. Sens. Actuar. B Chem. 2006, 115, 596–609. [Google Scholar] [CrossRef]
- Khadka, R.; Aydemir, N.; Kesküla, A.; Tamm, T.; Travas-Sejdic, J.; Kiefer, R. Enhancement of polypyrrole linear actuation with poly(ethylene oxide). Synth. Met. 2017, 232, 1–7. [Google Scholar] [CrossRef]
- Wang, X.; Smela, E. Experimental Studies of Ion Transport in PPy(DBS). J. Phys. Chem. C 2009, 113, 369–381. [Google Scholar] [CrossRef]
- Aydemir, N.; Kilmartin, P.A.; Travas-Sejdic, J.; Kesküla, A.; Peikolainen, A.-L.; Parcell, J.; Harjo, M.; Aabloo, A.; Kiefer, R. Electrolyte and solvent effects in PPy/DBS linear actuators. Sens. Actuar. B Chem. 2015, 216, 24–32. [Google Scholar] [CrossRef]
- Vidanapathirana, K.P.; Careem, M.A.; Skaarup, S.; West, K. Ion movement in polypyrrole/dodecylbenzenesulphonate films in aqueous and non-aqueous electrolytes. Solid State Ionics 2002, 154, 331–335. [Google Scholar] [CrossRef]
- Gade, V.K.; Shirale, D.J.; Gaikwad, P.D.; Kakde, K.P.; Savale, P.A.; Kharat, H.J.; Shirsat, M.D. Synthesis and Characterization of Ppy-PVS, Ppy-pTS, and Ppy-DBS Composite Films. Int. J. Polym. Mater. 2007, 56, 107–114. [Google Scholar] [CrossRef]
- Kiefer, R.; Kesküla, A.; Martinez, J.G.; Anbarjafari, G.; Torop, J.; Otero, T.F. Interpenetrated triple polymeric layer as electrochemomechanical actuator: Solvent influence and diffusion coefficient of counterions. Electrochim. Acta 2017, 230, 461–469. [Google Scholar] [CrossRef]
- Tominaga, K.; Hamai, K.; Gupta, B.; Kudoh, Y.; Takashima, W.; Prakash, R.; Kaneto, K. Suppression of electrochemical creep by cross-link in polypyrrole soft actuators. Phys. Procedia 2011, 14, 143–146. [Google Scholar] [CrossRef]
- Smela, E.; Gadegaard, N. Volume change in polypyrrole studied by atomic force microscopy. J. Phys. Chem. B 2001, 105, 9395–9405. [Google Scholar] [CrossRef]
- Khadka, R.; Zondaka, Z.; Kesküla, A.; Safaei Khorram, M.; Thien Khanh, T.; Tamm, T.; Travas-Sejdic, J.; Kiefer, R.; Minh City, C. Influence of solvent on linear polypyrrole-polyethylene oxide actuators. J. Appl. Polym. Sci. 2018, 46831, 1–7. [Google Scholar] [CrossRef]
- Hahn, M.; Barbieri, O.; Campana, F.P.; Kötz, R.; Gallay, R. Carbon based double layer capacitors with aprotic electrolyte solutions: The possible role of intercalation/insertion processes. Appl. Phys. A Mater. Sci. Process. 2006, 82, 633–638. [Google Scholar] [CrossRef]
- Kaasik, F.; Tamm, T.; Hantel, M.M.M.; Perre, E.; Aabloo, A.; Lust, E.; Bazant, M.Z.Z.; Presser, V. Anisometric charge dependent swelling of porous carbon in an ionic liquid. Electrochem. Commun. 2013, 34, 196–199. [Google Scholar] [CrossRef]
- Xu, C. A practical model for uncertainty evaluation in force measurements. Meas. Sci. Technol. 1998, 9, 1831–1836. [Google Scholar] [CrossRef]
- Kiefer, R.; Aydemir, N.; Torop, J.; Tamm, T.; Temmer, R.; Travas-Sejdic, J.; Must, I.; Kaasik, F.; Aabloo, A. Carbide-derived carbon as active interlayer of polypyrrole tri-layer linear actuator. Sens. Actuar. B Chem. 2014, 201, 100–106. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harjo, M.; Tamm, T.; Anbarjafari, G.; Kiefer, R. Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators. Polymers 2019, 11, 1054. https://doi.org/10.3390/polym11061054
Harjo M, Tamm T, Anbarjafari G, Kiefer R. Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators. Polymers. 2019; 11(6):1054. https://doi.org/10.3390/polym11061054
Chicago/Turabian StyleHarjo, Madis, Tarmo Tamm, Gholamreza Anbarjafari, and Rudolf Kiefer. 2019. "Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators" Polymers 11, no. 6: 1054. https://doi.org/10.3390/polym11061054
APA StyleHarjo, M., Tamm, T., Anbarjafari, G., & Kiefer, R. (2019). Hardware and Software Development for Isotonic Strain and Isometric Stress Measurements of Linear Ionic Actuators. Polymers, 11(6), 1054. https://doi.org/10.3390/polym11061054