
Design of Fuzzy Logic Motion Detection Algorithm for the Bracelet Type Sensor Consisting of Conductive Layer-Polymer Composite Film


Abstract
:1. Introduction
2. Experimental Setup
3. Design of Fuzzy Logic Motion Detection Algorithm
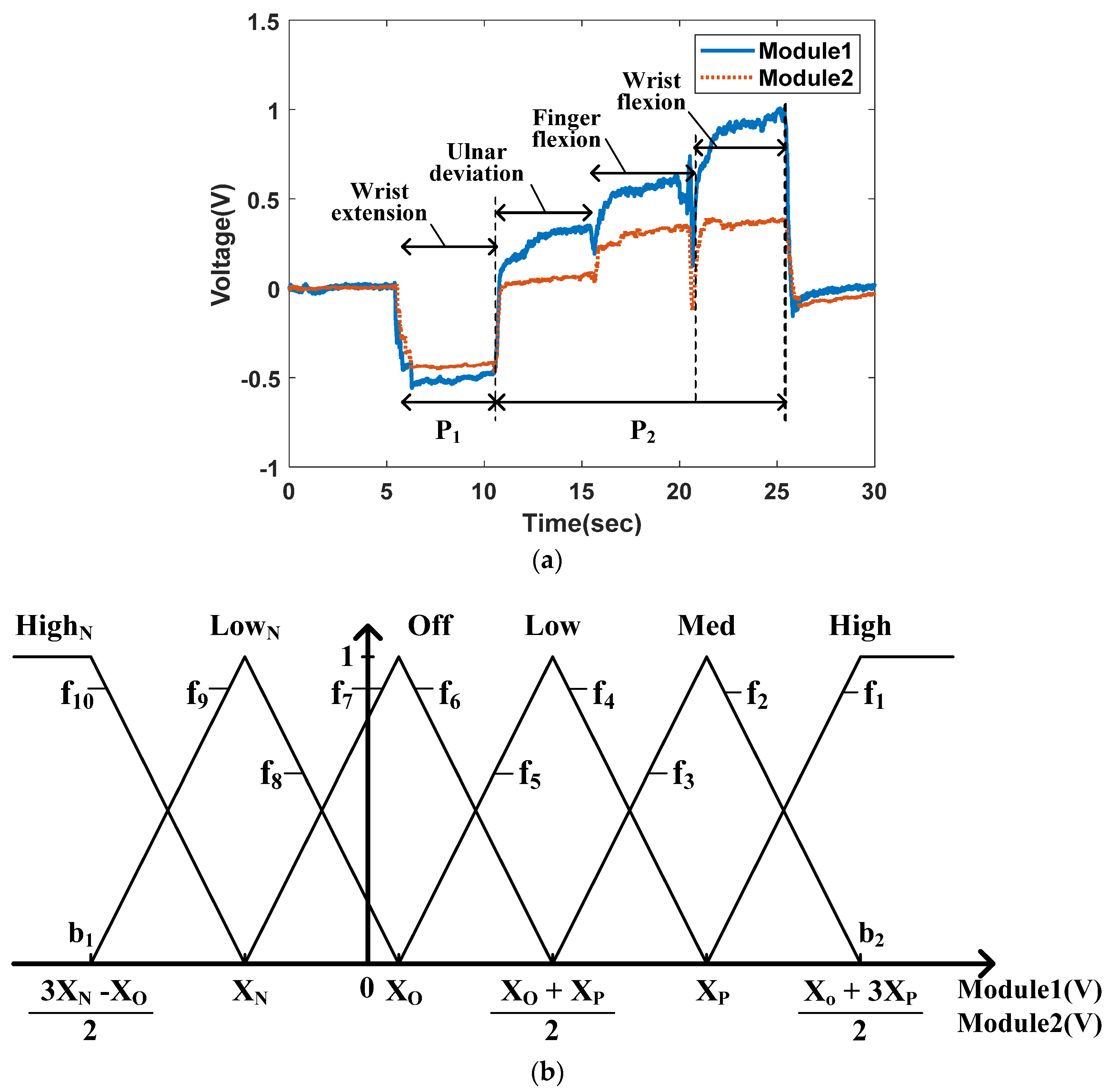
3.1. Fuzzification
| Algorithm 1. Fuzzification algorithm for signals from modules 1 and 2. |
| If Mean of 5 data from Modulek > Then HighN = 0, LowN = 0, Off = 0, Low = 0, Med = 0, High = 1 Else if < Mean of 5 data from Modulek ≤ Then Calculate the weight of Med and High by using f2 and f1 in Figure 5b HighN = 0, LowN = 0, Off = 0, Low = 0 Else if < Mean of 5 data from Modulek ≤ Then Calculate the weight of Low and Med by using f4 and f3 in Figure 5b HighN = 0, LowN = 0, Off = 0, High = 0 Else if < Mean of 5 data from Modulek ≤ Then Calculate the weight of Off and Low by using f6 and f5 in Figure 5b HighN = 0, LowN = 0, Med = 0, High = 0 Else if < Mean of 5 data from Modulek ≤ Then Calculate the weight of LowN and Off by using f8 and f7 in Figure 5b HighN = 0, Low = 0, Med = 0, High = 0 Else if < Mean of 5 data from Modulek ≤ Then Calculate the weight of HighN and LowN by using f10 and f9 in Figure 5b Off = 0, Low = 0, Med = 0, High = 0 Else HighN = 1, LowN = 0, Off = 0, Low = 0, Med = 0, High = 0 end |
| (Module number: k = 1, 2) |
3.2. Rule Evaluation
3.3. Defuzzification
| Algorithm 2. Rule evaluation and defuzzification algorithm to detect the four motions: wrist extension, ulnar deviation, finger flexion, and wrist flexion. |
| 1. Acquiring fuzzy values consisting of names and weights from the modules 1 and 2 Module 1: HighN1(weight), LowN1(weight), Off1(weight), Low1(weight), Med1(weight), High1(weight) Module 2: HighN2(weight), LowN2(weight), Off2(weight), Low2(weight), Med2(weight), High2(weight) 2. Defuzzification process using (1) (1) Calculation of numerator in (1): WEnum = MIN (HighN1, HighN2)Rule1 × Highmotion(=2) + ··· + MIN (Low1, Off2)Rule21 × Lowmotion(=0.5) + ··· + MIN (High1, High2)Rule36 × Lowmotion(=0.5) UDnum = MIN (HighN1, HighN2)Rule1 × Lowmotion(=0.5) + ··· + MIN (Low1, Off2)Rule21 × Highmotion(=1) + ··· + MIN (High1, High2)Rule36 × Lowmotion(=0.5) FFnum = MIN (HighN1, HighN2)Rule1 × Lowmotion(=0.5) + ··· + MIN (Low1, Off2)Rule21 × Lowmotion(=1) + ··· + MIN (High1, High2)Rule36 × Lowmotion(=0.5) WFnum = MIN (HighN1, HighN2)Rule1 × Lowmotion(=0.5) + ··· + MIN (Low1, Off2)Rule21 × Lowmotion(=0.5) + ··· + MIN (High1, High2)Rule36 × Highmotion(=0.5) OSnum = MIN (HighN1, HighN2)Rule1 × Lowmotion(=0.5) + ··· + MIN (Low1, Off2)Rule21 × Medmotion(=0.5) + ··· + MIN (High1, High2)Rule36 × Lowmotion(=2) (2) Calculation of denominator in (1): WEden = MIN (HighN1, HighN2)Rule1 + ··· + MIN (Low1, Off2)Rule21 + ··· + MIN (High1, High2)Rule36 UDden = MIN (HighN1, HighN2)Rule1 + ··· + MIN (Low1, Off2)Rule21 + ··· + MIN (High1, High2)Rule36 FFden = MIN (HighN1, HighN2)Rule1 + ··· + MIN (Low1, Off2)Rule21 + ··· + MIN (High1, High2)Rule36 WFden = MIN (HighN1, HighN2)Rule1 + ··· + MIN (Low1, Off2)Rule21 + ··· + MIN (High1, High2)Rule36 OSden = MIN (HighN1, HighN2)Rule1 + ··· + MIN (Low1, Off2)Rule21 + ··· + MIN (High1, High2)Rule36 (3) Calculation of defuzzification vlaues for each motion: Defuzzification value for wrist extension = WEnum/WEden = α Defuzzification value for wrist extension = UDnum/UDden = β Defuzzification value for ulnar deviation = FFnum/FFden = γ Defuzzification value for finger flexion = WFnum/WFden = δ Defuzzification value for wrist flexion = OSnum/OSden = ε (4) Decision of the motion of forearm: The motion of forearm = MAX[α β γ δ ε] |
4. Results and Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Xie, H.; Tao, X.; Ye, H.; Lu, J. WeCare: An intelligent badge for elderly danger detection and alert. In Proceedings of the International Conference Ubiquitous Intelligence & Computing, Vietri sul Mare, Italy, 18–21 December 2013. [Google Scholar] [CrossRef]
- Arozi, M.; Ariyanto, M.; Kristianto, A.; Setiawan, J.D. EMG signal processing of Myo armband sensor for prosthetic hand input using RMS and ANFIS. In Proceedings of the 7th International Conference on Information Technology, Computer, and Electrical Engineering, Semarang, Indonesia, 24–25 September 2020. [Google Scholar]
- Wang, M.; Bulger, M.; Dai, Y.; Noël, K.; Axon, C.; Brandenberger, A.; Fay, S.; Gao, Z.; Gilmer, S.; Hamdan, J.; et al. A 3D-Printed, adjustable armband for electromyography-based finger movement classification with haptic feedback. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Toronto, ON, Canada, 11–14 October 2020. [Google Scholar]
- Gue, W.; Sheng, X.; Liu, J.; Hua, L.; Zhang, D.; Zhu, X. Towards zero training for myoelectric control based on a wearable wireless sEMG armband. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Busan, Korea, 7–11 July 2015. [Google Scholar]
- Zizoua, C.; Raison, M.; Boukhenous, S.; Attari, M.; Achiche, S. Development of a bracelet with strain-gauge matrix for movement intention identification in traumatic amputees. IEEE Sens. J. 2017, 17, 2464–2471. [Google Scholar] [CrossRef]
- Honda, Y.; Weber, S.; Lueth, T.C. Intelligent recognition system for hand gestures. In Proceedings of the 3rd International IEEE/EMBS Conference on Neural Engineering, Kohala Coast, HI, USA, 2–5 May 2007. [Google Scholar]
- Kõiva, R.; Riedenklau, E.; Viegas, C.; Castellini, C. Shape conformable high spatial resolution tactile bracelet for detecting hand and wrist activity. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015. [Google Scholar] [CrossRef] [Green Version]
- Luo, W.; Sharma, V.; Young, D.J. A paper-based flexible tactile sensor array for low-cost wearable human health monitoring. J. Microelectromech. Syst. 2020, 29, 825–831. [Google Scholar] [CrossRef]
- Shao, Y.; Hu, H.; Visell, Y. A wearable tactile sensor array for large area remote vibration sensing in the hand. IEEE Sens. J. 2020, 20, 6612–6623. [Google Scholar] [CrossRef] [Green Version]
- Castellini, C.; Kõiva, R. Using a high spatial resolution tactile sensor for intention detection. In Proceedings of the 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.Q.; Zhang, J.C.; Zhu, R. A wearable human motion tracking device using micro flow sensor incorporating a micro accelerometer. IEEE Trans. Biomed. Eng. 2020, 67, 940–948. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.Q.; Zhang, J.C.; Li, G.Z.; Zhu, R. A wearable flow-MIMU device for monitoring human dynamic motion. IEEE Trans. Neural Sys. Rehabil. Eng. 2020, 28, 637–645. [Google Scholar] [CrossRef] [PubMed]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly sensitive skin-mountable strain gauges based entirely on elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Zens, M.; Ruhhammer, J.; Goldschmidtboeing, F.; Feucht, M.J.; Bernstein, A.; Niemeyer, P.; Mayr, H.O.; Woias, P. Polydimethylsiloxane strain gauges for biomedical applications. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Anchorage, AL, USA, 21–25 June 2015. [Google Scholar] [CrossRef]
- Baloda, S.; Ansari, Z.A.; Singh, S.; Gupta, N. Development and analysis of graphene nanoplatelets (GNPs)-based flexible strain sensor for health monitoring applications. IEEE Sens. J. 2020, 20, 13302–13309. [Google Scholar] [CrossRef]
- Chossat, J.B.; Park, Y.L.; Wood, R.J.; Duchaine, V. A soft strain sensor based on ionic and metal liquids. IEEE Sens. J. 2013, 13, 3405–3414. [Google Scholar] [CrossRef]
- Park, Y.L.; Chen, B.R.; Wood, R.J. Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors. IEEE Sens. J. 2012, 16, 2711–2718. [Google Scholar] [CrossRef]
- Part, Y.L.; Majidi, C.; Kramer, R.; Bérard, P.; Wood, R.J. Hyperelastic pressure sensing with a liquid-embedded elastomer. J. Micromech. Microeng. 2010, 20, 125029. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.N.; Lin, J.; Zhang, J.; Yu, Y.; Yuan, B.; Fan, C.C.; Wang, L.; Liu, J. Liquid metal enabled flexible electronic system for eye movement tracking. IEEE Sens. J. 2018, 18, 2592–2598. [Google Scholar] [CrossRef]
- Zhang, J. Liquid metal based stretchable sensor for human-computer interact. In Proceedings of the International Conference on Nanoscience and Technology, Chengdu, China, 26–28 June 2021. [Google Scholar]
- Đorđević, S.; Stančin, S.; Meglič, A.; Milutinović, V.; Tomažič, S. MC sensor—A novel method for measurement of muscle tension. Sensors 2011, 11, 9411–9425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lukowicz, P.; Hanser, F.; Szubski, C.; Schobersberger, W. Detecting and interpreting muscle activity with wearable force sensors. In Proceedings of the International Conference on Pervasive Computing, Dublin, Ireland, 7–10 May 2006; Springer: Berlin/Heidelberg, Germany. [Google Scholar] [CrossRef]
- Ejehi, F.; Mohammadpour, R.; Asadian, E.; Sasanpour, P.; Fardindoost, S.; Akhavan, O. Graphene oxide papers in nanogenerators for self-powered humidity sensing by finger tapping. Sci. Rep. 2020, 10, 7312. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Li, X.; Sun, Y. A triboelectric motion sensor in wearable body sensor network for human activity recognition. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Orlando, FL, USA, 16–20 August 2016. [Google Scholar]
- Li, W.; Sengupta, D.; Pei, Y.; Kottapalli, A.G.P. Wearable nanofiber-based triboelectric nanogenerator for body motion energy harvesting. In Proceedings of the 2021 IEEE International Conference on Flexible and Printable Sensors and Systems, Manchester, UK, 20–23 June 2021. [Google Scholar]
- Nhu, C.T.; Ngoc, A.N.; Dau, V.T.; Van, C.L.; Duc, C.; Bui, T.T. Wearable fluidic strain sensor for human motion sensing. In Proceedings of the IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar]
- Kwon, D.; Na, K.; Kang, K.; Lee, J.Y.; Park, I. Flexible optical pressure sensor and its application to wearable human motion detecting device. In Proceedings of the IEEE Micro Electro Mechanical Systems, Belfast, UK, 21–25 January 2018. [Google Scholar]
- Park, K. Wearable sensor for forearm motion detection using a carbon-based conductive layer-polymer composite film. Sensors 2022, 22, 2236. [Google Scholar] [CrossRef] [PubMed]
- Park, K.; Yoon, M.-K.; Lee, S.; Choi, J.; Thubrikar, M. Effects of electrode degradation and solvent evaporation on the performance of ionic-polymer–metal composite sensors. Smart Mater. Struct. 2010, 19, 075002. [Google Scholar] [CrossRef]
- Kanoun, O.; Muller, C.; Benchirouf, A.; Sanli, A.; Gerlach, C.; Bouhamed, A. Carbon nanotube polymer composites for high performance strain sensors. In Proceedings of the 1st Workshop on Nanotechnology in Instrumentation and Measurement, Lecce, Italy, 24–25 July 2015. [Google Scholar] [CrossRef]
- Wicaksono, D.H.B.; Benhanan, B.; Parung, D.E.; Ughi, F.; Shafi, A.; Mandala, S.; Biben, V.; Maulana, N.; Arisanti, F.; Herbani, Y.; et al. Carbon nanotube-coated thread as sensor for wearable mechanomyography of leg muscles. In Proceedings of the IEEE Sensors, New Delhi, India, 28–31 October 2018. [Google Scholar] [CrossRef]
- Pyo, S.; Jo, E.; Kwon, D.S.; Kim, W.; Chang, W.; Kim, J. Fabrication of carbon nanotube-coated fabric for highly sensitive pressure sensor. In Proceedings of the 19th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Kaohsiung, Taiwan, 18–22 June 2017. [Google Scholar] [CrossRef]
- Kuzubaşoğlu, B.A.; Bahadir, S.K. Modeling of carbon nanotube-based wearable textile temperature sensor via artificial intelligence. In Proceedings of the 29th Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkey, 9–11 June 2021. [Google Scholar] [CrossRef]
- Dinh, T.; Nguyen, T.; Dau, V.T.; Riduan, F.A.; Tran, C.D.; Phan, H.P.; Nguyen, T.K.; Guzman, P.; Nguyen, N.T.; Dao, D.V. Flexible and wearable flow sensor using spinnable carbon nanotube nanofilm for respiration monitoring. In Proceedings of the IEEE 33rd International Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 18–22 January 2020. [Google Scholar] [CrossRef]
- Karuna, M.; Ganesh, C.; Das, R.P.; Kumar, V. Classification of wrist movements through EMG signals with fuzzy logic algorithm. In Proceedings of the International conference on Energy, Communication, Data Analytics and Soft Computing, Chennai, India, 1–2 August 2017. [Google Scholar]
- Güvenç, S.A.; Demir, M.; Ulutas, M. Detection of forearm movements using wavelets and adaptive neuro-fuzzy inference system. In Proceedings of the IEEE International Symposium on Innovations in Intelligent Systems and Applications, Alberobello, Italy, 23–25 June 2014. [Google Scholar]
- Jia, G.; Lam, H.K.; Ma, S.; Yang, Z.; Xu, Y.; Xiao, B. Classification of electromyographic hand gesture signals using modified fuzzy c-means clustering and two-step machine learning approach. IEEE Trans. Neural Sys. Rehabil. Eng. 2020, 28, 1428–1435. [Google Scholar] [CrossRef] [PubMed]
- Mittal, H.K.; Divya. Efficiency improvement of IoT in healthcare using embedded fuzzy technique. In Proceedings of the 4th International Conference on Computational Intelligence and Communication Technologies, Sonepat, India, 3 July 2021. [Google Scholar]
- Çelik, M.S.; Eminoğlu, İ. Fuzzy logic based classification for multifunctional upper limb prostheses. In Proceedings of the Medical Technologies National Congress, Antalya, Turkey, 27–29 October 2016. [Google Scholar]
- Maeda, Y.; Ishibashi, S. Operating instruction method based on EMG for omnidirectional wheelchair robot. In Proceedings of the 17th World congress of International Fuzzy Systems Association and 9th International Conference on Soft Computing and Intelligent Systems, Otsu, Japan, 27–30 June 2017. [Google Scholar]
- Karlik, B.; Osman Tokhi, M.; Alci, M. A fuzzy clustering neural network architecture for multifunction upper-limb prosthesis. IEEE Trans. Biomed. Eng. 2003, 50, 1255–1261. [Google Scholar] [CrossRef] [PubMed]
- Ajiboye, A.B.; Weir, R. A heuristic fuzzy logic approach to EMG pattern recognition for multifunctional prosthesis control. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 280–291. [Google Scholar] [CrossRef] [PubMed]
- Atitallah, B.B.; Abbasi, M.B.; Barioul, R.; Bouchaala, D.; Derbel, N.; Kanoun, O. Simultaneous pressure sensors monitoring system for hand gestures recognition. In Proceedings of the IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rules | If | Fuzzy Names | Then | Strength of Motions | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Module1 | and | Module2 | Wrist Extension | Ulnar Deviation | Finger Flexion | Wrist Flexion | Off State | |||
| 1 | If | HighN | and | HighN | Then | Highmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion |
| 2 | HighN | LowN | Medmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| 3 | HighN | Off | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| ⁝ | ⁝ | ⁝ | ⁝ | |||||||
| 7 | LowN | HighN | Medmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| 8 | LowN | LowN | Medmotion | Lowmotion | Lowmotion | Lowmotion | Medmotion | |||
| 9 | LowN | Off | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Medmotion | |||
| ⁝ | ⁝ | ⁝ | ⁝ | |||||||
| 13 | Off | HighN | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| 14 | Off | LowN | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Medmotion | |||
| 15 | Off | Off | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Highmotion | |||
| ⁝ | ⁝ | ⁝ | ⁝ | |||||||
| 21 | Low | Off | Lowmotion | Highmotion | Lowmotion | Lowmotion | Medmotion | |||
| 22 | Low | Low | Lowmotion | Medmotion | Lowmotion | Lowmotion | Medmotion | |||
| 23 | Low | Med | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| ⁝ | ⁝ | ⁝ | ⁝ | |||||||
| 28 | Med | Low | Lowmotion | Medmotion | Lowmotion | Lowmotion | Lowmotion | |||
| 29 | Med | Med | Lowmotion | Lowmotion | Medmotion | Lowmotion | Lowmotion | |||
| 30 | Med | High | Lowmotion | Lowmotion | Highmotion | Lowmotion | Lowmotion | |||
| ⁝ | ⁝ | ⁝ | ⁝ | |||||||
| 34 | High | Low | Lowmotion | Lowmotion | Lowmotion | Lowmotion | Lowmotion | |||
| 35 | High | Med | Lowmotion | Lowmotion | Medmotion | Medmotion | Lowmotion | |||
| 36 | High | High | Lowmotion | Lowmotion | Lowmotion | Highmotion | Lowmotion | |||
| Motion | Resting State | Wrist Extension | Ulnar Deviation | Finger Flexion | Wrist Flexion |
|---|---|---|---|---|---|
| Accuracy rate1 (%) | 99.80 | 99.79 | 85.67 | 87.88 | 84.43 |
| Accuracy rate2 (%) | 99.80 | 99.75 | 98.52 | 86.68 | 87.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, K. Design of Fuzzy Logic Motion Detection Algorithm for the Bracelet Type Sensor Consisting of Conductive Layer-Polymer Composite Film. Polymers 2022, 14, 2309. https://doi.org/10.3390/polym14122309
Park K. Design of Fuzzy Logic Motion Detection Algorithm for the Bracelet Type Sensor Consisting of Conductive Layer-Polymer Composite Film. Polymers. 2022; 14(12):2309. https://doi.org/10.3390/polym14122309
Chicago/Turabian StylePark, Kiwon. 2022. "Design of Fuzzy Logic Motion Detection Algorithm for the Bracelet Type Sensor Consisting of Conductive Layer-Polymer Composite Film" Polymers 14, no. 12: 2309. https://doi.org/10.3390/polym14122309