
An Effective Shrinkage Control Method for Tooth Profile Accuracy Improvement of Micro-Injection-Molded Small-Module Plastic Gears


Abstract
:
1. Introduction
2. Materials and Methods
2.1. 3D model and Material of Studied Gear
2.2. Moldflow Simulation
2.3. Experimental Design
2.4. Approximate Surrogate Model
2.5. Multi-Objective Optimization
2.6. Experimental Verification of Simulation Model and Optimization Method
3. Results and Discussion
3.1. Simulation Model Accuracy
3.2. Approximate Surrogate Models and Effect Analysis of Process Parameters
3.3. NSGA-II Algorithm Optimization Results
3.4. Optimization Method Validation
4. Conclusions
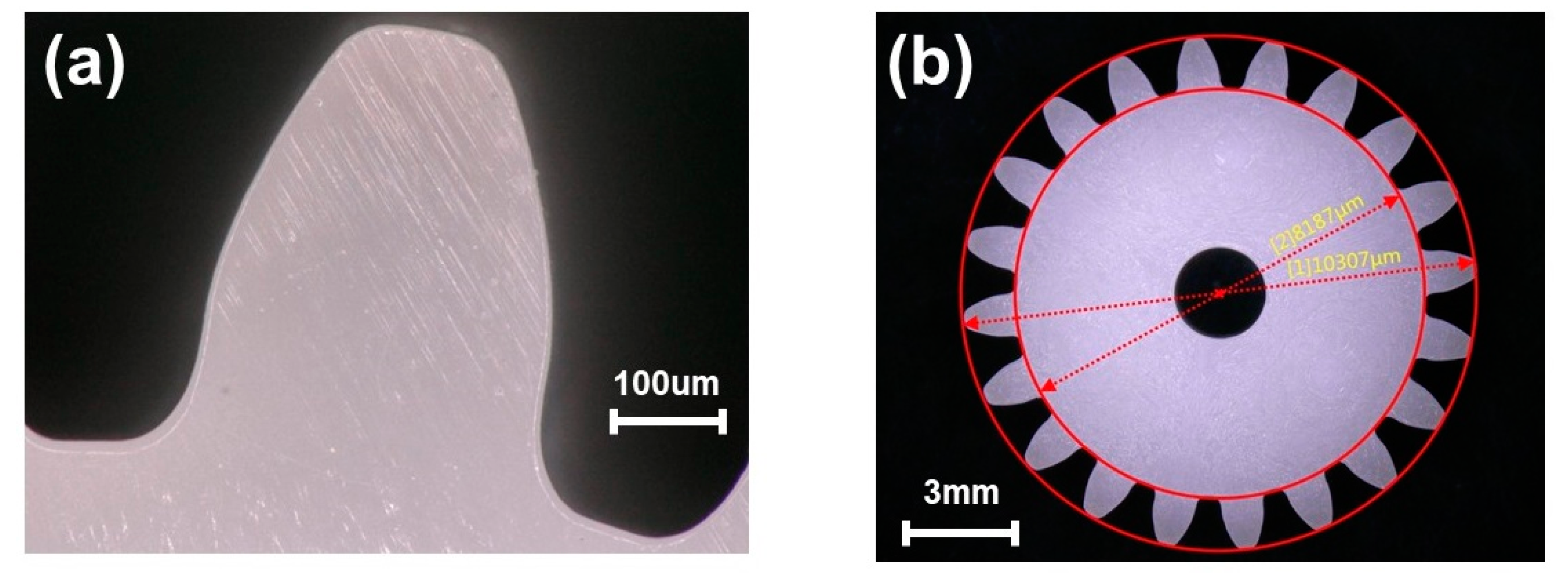
- The shrinkage of the gear was different at different positions. The tooth part of the gear shrank the most. Moreover, the shrinkage degree near the addendum and the root circle of the small-module plastic gear was the largest. The relative errors of the key dimension shrinkage between the micro-injection molding experiment and simulation were all less than 2%.
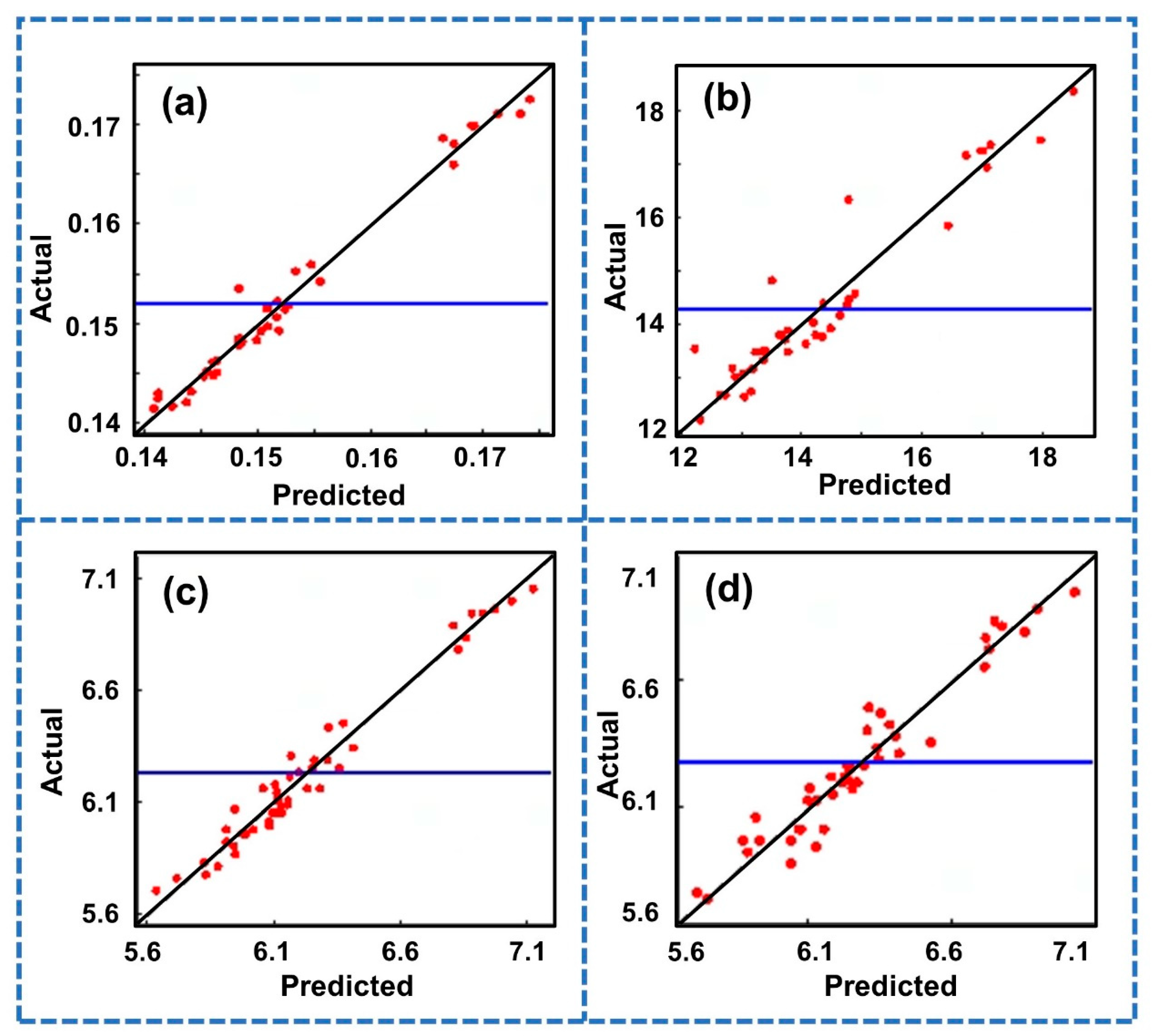
- The factor that had the greatest influence on the shrinkage of the small-module plastic gears was the packing time, and there was a complex interaction between the process parameters. The accuracy of the RSM-Quadratic for the optimization objectives reached more than 92 %.
- The simulation results showed that the , , , and values of the studied gear were reduced by 5.60%, 8.23%, 11.71%, and 11.39%, respectively. Moreover, the tooth profile inclination deviation (), tooth profile deviation () and total tooth profile deviation () were reduced by 47.57%, 23.43%, and 49.96%, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, L.; Zhang, Y. Advances in Polyarylethers: Opening New Opportunities. J. Mater. Chem. C 2019, 7, 14767–14770. [Google Scholar] [CrossRef]
- Dhanumalayan, E.; Joshi, G.M. Performance Properties and Applications of Polytetrafluoroethylene (PTFE)-a Review. Adv. Compos. Hybrid Mater. 2018, 1, 247–268. [Google Scholar] [CrossRef]
- Li, D.; Zhang, S.; Yang, X.; Ma, H.; Sun, S. Numerical Investigation on Roll Forming of Straight Bevel Gear. Int. J. Adv. Manuf. Technol. 2020, 107, 1517–1537. [Google Scholar] [CrossRef]
- Kadota, Y.; Inoue, K.; Uzuka, K.; Suenaga, H.; Morita, T. Noncontact Operation of a Miniature Cycloid Motor by Magnetic Force. IEEE-ASME Trans. Mechatron. 2013, 18, 1563–1571. [Google Scholar] [CrossRef]
- Kovan, V. Elasto-Plastic Separation Frequency Analysis of Interference Fitted Joints in Lightweight Materials. Int. J. Comput. Methods 2018, 15, 1850026. [Google Scholar] [CrossRef]
- Rana, R.S.; Nigrawal, A.; Rana, S.; Purohit, R. Design and Development of Epoxy Hybrid Composite Gears for Low-Powered Application. Adv. Mater. Process. Technol. 2020, 6, 328–337. [Google Scholar] [CrossRef]
- Bravo, A.; Toubal, L.; Koffi, D.; Erchiqui, F. Gear Fatigue Life and Thermomechanical Behavior of Novel Green and Bio-Composite Materials VS High-Performance Thermoplastics. Polym. Test 2018, 66, 403–414. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, K. Energy-Efficient Micromolding and in-Mold Compounding Using Ultrasonic Vibration Energy with Enhanced Material Flow. Microsyst. Technol. 2020, 26, 1021–1030. Available online: https://link.springer.com/article/10.1007/s00542-019-04619-5 (accessed on 24 July 2022). [CrossRef]
- Zhang, H.; Ren, L.; Gao, Y.; Jin, B. A Comprehensive Study of Energy Conservation in Electric-Hydraulic Injection-Molding Equipment. Energies 2017, 10, 1768. [Google Scholar] [CrossRef] [Green Version]
- Mohan, M.; Ansari, M.N.M.; Shanks, R.A. Review on the Effects of Process Parameters on Strength, Shrinkage, and Warpage of Injection Molding Plastic Component. Polym.-Plast. Technol. Eng. 2017, 56, 1–12. [Google Scholar] [CrossRef]
- Azdast, T.; Hasanzadeh, R. Experimental Assessment and Optimization of Shrinkage Behavior of Injection Molded Polycarbonate Parts. Mater. Res. Express 2019, 6, 115334. [Google Scholar] [CrossRef]
- de Baynast, H.; Tribot, A.; Niez, B.; Audonnet, F.; Badel, E.; Cesar, G.; Dussap, C.-G.; Gastaldi, E.; Massacrier, L.; Michaud, P.; et al. Effects of Kraft Lignin and Corn Cob Agro-Residue on the Properties of Injected-Moulded Biocomposites. Ind. Crop. Prod. 2022, 177, 114421. [Google Scholar] [CrossRef]
- Shirinbayan, M.; Rezaei-khamseh, M.; Nikooharf, M.H.; Tcharkhtchi, A.; Fitoussi, J. Multi-Scale Analysis of Mechanical Properties and Damage Behavior of Polypropylene Composite (GF50-PP) Plate at Room and Cryogenic Temperatures. Compos. Struct. 2021, 278, 114713. [Google Scholar] [CrossRef]
- Zeng, K.; Wu, X.; Liang, X.; Xu, B.; Wang, Y.; Chen, X.; Cheng, R.; Luo, F. Process and Properties of Micro-Ultrasonic Powder Molding with Polypropylene. Int. J. Adv. Manuf. Technol. 2014, 70, 515–522. [Google Scholar] [CrossRef]
- He, X.; Wu, W. A Practical Numerical Approach to Characterizing Non-Linear Shrinkage and Optimizing Dimensional Deviation of Injection-Molded Small Module Plastic Gears. Polymers 2021, 13, 2092. [Google Scholar] [CrossRef]
- Dhaduti, S.C.; Sarganachari, S.G.; Patil, A.Y.; Yunus Khan, T.M. Prediction of Injection Molding Parameters for Symmetric Spur Gear. J. Mol. Model. 2020, 26, 302. [Google Scholar] [CrossRef] [PubMed]
- Alvarado-Iniesta, A.; Cuate, O.; Schutze, O. Multi-Objective and Many Objective Design of Plastic Injection Molding Process. Int. J. Adv. Manuf. Technol. 2019, 102, 3165–3180. [Google Scholar] [CrossRef]
- Vera, J.; Brulez, A.-C.; Contraires, E.; Larochette, M.; Trannoy-Orban, N.; Pignon, M.; Mauclair, C.; Valette, S.; Benayoun, S. Factors Influencing Microinjection Molding Replication Quality. J. Micromech. Microeng. 2018, 28, 015004. [Google Scholar] [CrossRef]
- Hribersek, M.; Kulovec, S. Preliminary Study of Void Influence on Polyamide 66 Spur Gears Durability. J. Polym. Res. 2022, 29, 223. [Google Scholar] [CrossRef]
- Lee, J.; Yang, D.; Yoon, K.; Kim, J. Effects of Input Parameter Range on the Accuracy of Artificial Neural Network Prediction for the Injection Molding Process. Polymers 2022, 14, 1724. [Google Scholar] [CrossRef] [PubMed]
- Lin, W.-C.; Fan, F.-Y.; Huang, C.-F.; Shen, Y.-K.; Wang, H. Analysis of the Warpage Phenomenon of Micro-Sized Parts with Precision Injection Molding by Experiment, Numerical Simulation, and Grey Theory. Polymers 2022, 14, 1845. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Cai, A. Influence of Mold Design and Injection Parameters on Warpage Deformation of Thin-Walled Plastic Parts. Polimery 2021, 66, 283–292. [Google Scholar] [CrossRef]
- Huang, C.-T.; Xu, R.-T.; Chen, P.-H.; Jong, W.-R.; Chen, S.-C. Investigation on the Machine Calibration Effect on the Optimization through Design of Experiments (DOE) in Injection Molding Parts. Polym. Test 2020, 90, 106703. [Google Scholar] [CrossRef]
- Huang, H.-Y.; Fan, F.-Y.; Lin, W.-C.; Huang, C.-F.; Shen, Y.-K.; Lin, Y.; Ruslin, M. Optimal Processing Parameters of Transmission Parts of a Flapping-Wing Micro-Aerial Vehicle Using Precision Injection Molding. Polymers 2022, 14, 1467. [Google Scholar] [CrossRef]
- Hakimian, E.; Sulong, A.B. Analysis of Warpage and Shrinkage Properties of Injection-Molded Micro Gears Polymer Composites Using Numerical Simulations Assisted by the Taguchi Method. Mater. Des. 2012, 42, 62–71. [Google Scholar] [CrossRef]
- Mizamzul, M.N.; Shahrul, K.; Rahim, O.A. Modeling and Analysis of Injection Moulding Process Parameters for Plastic Gear Industry Application. Ist. Ind. Eng. 2013, 2013, 869736. [Google Scholar] [CrossRef] [Green Version]
- Zhao, N.; Lian, J.; Wang, P.; Xu, Z. Recent Progress in Minimizing the Warpage and Shrinkage Deformations by the Optimization of Process Parameters in Plastic Injection Molding: A Review. Int. J. Adv. Manuf. Technol. 2022, 120, 85–101. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez Bobadilla, L.; Rojas Garcia, J.M.; Macedo Garduno, R. New Approach for the Dimensional Control of Plastic Gears Manufactured by Injection Molding in the Automotive Industry. MRS Adv. 2021, 6, 969–974. [Google Scholar] [CrossRef]
- Ortiz-de-Zarate, G.; Sela, A.; Saez-de-Buruaga, M.; Cuesta, M.; Madariaga, A.; Garay, A.; Arrazola, P.J. Methodology to Establish a Hybrid Model for Prediction of Cutting Forces and Chip Thickness in Orthogonal Cutting Condition Close to Broaching. Int. J. Adv. Manuf. Technol. 2019, 101, 1357–1374. [Google Scholar] [CrossRef]
- Deng, J.; Mao, H. A Blank Optimization Design Method for Three-Roll Cross Rolling of Complex-Groove and Small-Hole Ring. Int. J. Mech. Sci. 2015, 93, 218–228. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, Y. A Calculation Method for Friction Coefficient and Meshing Efficiency of Plastic Line Gear Pair under Dry Friction Conditions. Friction 2021, 9, 1420–1435. [Google Scholar] [CrossRef]
- Lin, A.-D.; Kuang, J.-H. Dynamic Interaction between Contact Loads and Tooth Wear of Engaged Plastic Gear Pairs. Int. J. Mech. Sci. 2008, 50, 205–213. [Google Scholar] [CrossRef]
- Mao, K.; Greenwood, D.; Ramakrishnan, R.; Goodship, V.; Shrouti, C.; Chetwynd, D.; Langlois, P. The Wear Resistance Improvement of Fibre Reinforced Polymer Composite Gears. Wear 2019, 426, 1033–1039. [Google Scholar] [CrossRef]
- Ding, Y.; Hassan, M.H.; Bakker, O.; Hinduja, S.; Bartolo, P. A Review on Microcellular Injection Moulding. Materials 2021, 14, 4209. [Google Scholar] [CrossRef] [PubMed]
- Kate, K.H.; Enneti, R.K.; Park, S.-J.; German, R.M.; Atre, S.V. Predicting Powder-Polymer Mixture Properties for PIM Design. Crit. Rev. Solid State Mat. Sci. 2014, 39, 197–214. [Google Scholar] [CrossRef]
- Hibbert, D.B. Experimental Design in Chromatography: A Tutorial Review. J. Chromatogr. B 2012, 910, 2–13. [Google Scholar] [CrossRef]
- Yolmeh, M.; Jafari, S.M. Applications of Response Surface Methodology in the Food Industry Processes. Food Bioprocess Technol. 2017, 10, 413–433. [Google Scholar] [CrossRef]
- Kleijnen, J.P.C. Regression and Kriging Metamodels with Their Experimental Designs in Simulation: A Review. Eur. J. Oper. Res. 2017, 256, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Nikan, O.; Machado, J.A.T.; Avazzadeh, Z.; Jafari, H. Numerical Evaluation of Fractional Tricomi-Type Model Arising from Physical Problems of Gas Dynamics. J. Adv. Res. 2020, 25, 205–216. [Google Scholar] [CrossRef]
- Makela, M. Experimental Design and Response Surface Methodology in Energy Applications: A Tutorial Review. Energy Conv. Manag. 2017, 151, 630–640. [Google Scholar] [CrossRef]
- Wu, H.; Du, Z.; Yang, Z.; Wen, X.; Xu, Z.; Xin, L. Coordination and Matching of Tire System of New Straddle-Type Rapid Transit Vehicle. Veh. Syst. Dyn. 2022, 1–16. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, Y.; Han, J.; Wang, Y. Design of Control Valve with Low Energy Consumption Based on Isight Platform. Energy 2022, 239, 122328. [Google Scholar] [CrossRef]
- Shaikh, P.W.; El-Abd, M.; Khanafer, M.; Gao, K. A Review on Swarm Intelligence and Evolutionary Algorithms for Solving the Traffic Signal Control Problem. IEEE Trans. Intell. Transp. Syst. 2022, 23, 48–63. [Google Scholar] [CrossRef]
- Nazari, M.H.; Hosseinian, S.H.; Farsani, E.A.; Faramarzi, D. An Incentive-Based Policy on Minimization of GHG Emissions and Loss Using Adaptive Group Search Multi-Objective Optimization Algorithm. Sci. Iran. 2022, 29, 230–246. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Xue, Y.; Xu, B.; Ma, T.; Liu, J. Multi-Objective Classification Based on NSGA-II. Int. J. Comput. Sci. Math. 2018, 9, 539–546. [Google Scholar] [CrossRef]
- Fettaka, S.; Thibault, J.; Gupta, Y. A New Algorithm Using Front Prediction and NSGA-II for Solving Two and Three-Objective Optimization Problems. Optim. Eng. 2015, 16, 713–736. [Google Scholar] [CrossRef]
- Ferreira, N.; Krah, T.; Jeong, D.C.; Metz, D.; Kniel, K.; Dietzel, A.; Buettgenbach, S.; Haertig, F. Integration of a Silicon-Based Microprobe into a Gear Measuring Instrument for Accurate Measurement of Micro Gears. Meas. Sci. Technol. 2014, 25, 064016. [Google Scholar] [CrossRef]
- Croccolo, D.; De Agostinis, M.; Olmi, G.; Vincenzi, N. A Practical Approach to Gear Design and Lubrication: A Review. Lubricants 2020, 8, 84. [Google Scholar] [CrossRef]
- Peterson, S.N.; Snesrud, E.; Schork, N.J.; Bretz, W.A. Dental Caries Pathogenicity: A Genomic and Metagenomic Perspective. Int. Dent. J. 2011, 61, 11–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Test Method | Value |
|---|---|---|
| Water absorption (%) | ASTM D-570 | 0.25 |
| Hardness (R) | ASTM D-785 | 120 |
| Tensile strength (MPa) | ASTM D-638 | 69 |
| Elasticity coefficient (MPa) | ASTM D-638 | 3360 |
| Deflection coefficient (MPa) | ASTM D-790 | 3090 |
| Shear strength (MPa) | ASTM D-732 | 66 |
| ) | ASTM D-1822 | 420 |
| Thermal expansion coefficient (10−5 m /m°C) | ASTM D-696 | 12.2 |
| Factors | Minimum Level | Intermediate Level | Maximum Level | |
|---|---|---|---|---|
| A | Mold temperature (°C) | 60 | 80 | 100 |
| B | Melt temperature (°C) | 190 | 210 | 230 |
| C | Packing pressure (MPa) | 60 | 70 | 80 |
| D | Packing time (s) | 1 | 3 | 5 |
| E | Cooling time (s) | 10 | 20 | 30 |
| Run# | Factor | Response of Optimize Objectives | |||||||
|---|---|---|---|---|---|---|---|---|---|
| A (°C) | B (°C) | C (MPa) | D (s) | E (s) | (mm) | (%) | (%) | (%) | |
| 1 | 80 | 210 | 80 | 3 | 10 | 0.1452 | 13.16 | 6.07273 | 6.33143 |
| 2 | 80 | 230 | 70 | 3 | 10 | 0.1452 | 14.37 | 6.01818 | 6.35429 |
| 3 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 13.49 | 6.12727 | 6.40000 |
| 4 | 100 | 190 | 70 | 3 | 20 | 0.1553 | 13.55 | 6.45455 | 6.67429 |
| 5 | 80 | 230 | 60 | 3 | 20 | 0.1479 | 14.59 | 6.16364 | 6.42286 |
| 6 | 100 | 230 | 70 | 3 | 20 | 0.1536 | 16.35 | 6.30909 | 6.69714 |
| 7 | 80 | 210 | 80 | 1 | 20 | 0.1687 | 17.18 | 6.89091 | 6.97143 |
| 8 | 100 | 210 | 70 | 3 | 10 | 0.1519 | 13.78 | 6.25455 | 6.51429 |
| 9 | 60 | 210 | 70 | 3 | 30 | 0.1453 | 13.49 | 5.98182 | 6.21714 |
| 10 | 80 | 210 | 60 | 1 | 20 | 0.1711 | 17.38 | 6.96364 | 7.04000 |
| 11 | 80 | 190 | 70 | 1 | 20 | 0.1726 | 15.86 | 7.05455 | 7.15429 |
| 12 | 60 | 210 | 70 | 5 | 20 | 0.1431 | 13.33 | 5.70909 | 5.96571 |
| 13 | 80 | 190 | 80 | 3 | 20 | 0.1486 | 12.21 | 6.09091 | 6.40000 |
| 14 | 60 | 190 | 70 | 3 | 20 | 0.1494 | 12.75 | 6.10909 | 6.46857 |
| 15 | 80 | 190 | 70 | 3 | 30 | 0.1523 | 12.68 | 6.29091 | 6.60571 |
| 16 | 80 | 230 | 70 | 5 | 20 | 0.1433 | 14.40 | 5.81818 | 6.08000 |
| 17 | 60 | 210 | 70 | 1 | 20 | 0.1681 | 16.96 | 6.83636 | 6.92571 |
| 18 | 100 | 210 | 80 | 3 | 20 | 0.1484 | 13.64 | 6.16364 | 6.40000 |
| 19 | 80 | 210 | 70 | 1 | 30 | 0.1699 | 17.27 | 6.94545 | 6.99429 |
| 20 | 100 | 210 | 70 | 5 | 20 | 0.1507 | 13.81 | 6.21818 | 6.42286 |
| 21 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 13.49 | 6.14545 | 6.46857 |
| 22 | 80 | 190 | 60 | 3 | 20 | 0.1560 | 13.08 | 6.43636 | 6.62857 |
| 23 | 100 | 210 | 70 | 3 | 30 | 0.1515 | 13.78 | 6.29091 | 6.58286 |
| 24 | 60 | 210 | 70 | 3 | 10 | 0.1453 | 13.49 | 5.96364 | 6.21714 |
| 25 | 80 | 210 | 80 | 3 | 30 | 0.1448 | 13.16 | 5.96364 | 6.21714 |
| 26 | 80 | 230 | 80 | 3 | 20 | 0.1422 | 14.18 | 5.87273 | 6.17143 |
| 27 | 80 | 210 | 60 | 3 | 10 | 0.1516 | 13.81 | 6.23636 | 6.46857 |
| 28 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 13.49 | 6.05455 | 6.37714 |
| 29 | 80 | 210 | 60 | 3 | 30 | 0.1516 | 13.81 | 6.16364 | 6.49143 |
| 30 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 13.49 | 6.10909 | 6.44571 |
| 31 | 80 | 190 | 70 | 3 | 10 | 0.1523 | 12.68 | 6.25455 | 6.53714 |
| 32 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 13.49 | 6.18182 | 6.46857 |
| 33 | 80 | 210 | 60 | 5 | 20 | 0.1498 | 13.89 | 6.05455 | 6.33143 |
| 34 | 80 | 210 | 70 | 5 | 10 | 0.1463 | 13.51 | 5.90909 | 6.26286 |
| 35 | 100 | 210 | 70 | 1 | 20 | 0.1711 | 17.47 | 7.00000 | 7.08571 |
| 36 | 80 | 230 | 70 | 3 | 30 | 0.1449 | 14.49 | 5.98182 | 6.37714 |
| 37 | 80 | 210 | 70 | 3 | 20 | 0.1483 | 14.83 | 6.07273 | 6.46857 |
| 38 | 80 | 190 | 70 | 5 | 20 | 0.1493 | 12.65 | 6.00000 | 6.14857 |
| 39 | 60 | 230 | 70 | 3 | 20 | 0.1416 | 14.04 | 5.83636 | 6.12571 |
| 40 | 60 | 210 | 80 | 3 | 20 | 0.1418 | 13.02 | 5.78182 | 6.17143 |
| 41 | 80 | 210 | 80 | 5 | 20 | 0.1426 | 13.18 | 5.76364 | 5.94286 |
| 42 | 80 | 210 | 70 | 5 | 30 | 0.1462 | 13.51 | 5.92727 | 6.17143 |
| 43 | 100 | 210 | 60 | 3 | 20 | 0.1543 | 13.93 | 6.34545 | 6.56000 |
| 44 | 80 | 210 | 70 | 1 | 10 | 0.1699 | 17.27 | 6.94545 | 7.01714 |
| 45 | 60 | 210 | 60 | 3 | 20 | 0.1483 | 13.72 | 6.05455 | 6.33143 |
| 46 | 80 | 230 | 70 | 1 | 20 | 0.1660 | 18.39 | 6.78182 | 6.85714 |
| Parameters | Value |
|---|---|
| Mold temperature (°C) | 80 |
| Melt temperature (°C) | 210 |
| Packing pressure (MPa) | 70 |
| Packing time (s) | 3 |
| Cooling time (s) | 20 |
| Simulation | 6.363 | 6.503 |
| Experiment | 6.334 | 6.571 |
| Error (%) | 0.300 | 1.035 |
| Approximation Surrogate Model | Accuracy (%) | |||
|---|---|---|---|---|
| Kriging | 94.734 | 81.693 | 93.985 | 90.850 |
| RBF | 94.638 | 87.661 | 95.089 | 91.870 |
| RSM-Linear | 67.662 | 52.482 | 74.930 | 80.850 |
| RSM-Quadratic | 98.229 | 92.838 | 98.031 | 94.562 |
| RSM-Cubic | 98.151 | 92.037 | 97.856 | 95.086 |
| RSM-Quartet | 98.015 | 91.609 | 97.660 | 94.590 |
| Polynomial Term | ||||
|---|---|---|---|---|
| Constant | 0.37925 | 33.06385 | 14.13387 | 11.46747 |
| −0.00094 | −0.26211 | −0.02770 | −0.04402 | |
| −0.00116 | −0.10297 | −0.04364 | −0.04514 | |
| −0.00445 | 0.03879 | −0.00744 | 0.08270 | |
| −0.01898 | −1.97750 | −0.81237 | −0.59975 | |
| 0.00018 | 0.01842 | 0.02115 | 0.03480 | |
| 1.12500 | 0.00029 | 0.00003 | −0.00002 | |
| 1.29167 | 0.00011 | 0.00006 | 0.00005 | |
| −1.16667 | −0.00150 | −0.00012 | −0.00049 | |
| 0.00024 | 0.42343 | 0.07602 | 0.03973 | |
| 0.00000 | −0.00123 | 2.66667 | 0.00009 | |
| 0.00000 | 0.00094 | 0.00008 | 0.00023 | |
| 0.00000 | 0.00051 | 0.00011 | −0.00003 | |
| 0.00000 | −0.00019 | 0.00216 | 0.00186 | |
| 0.00000 | 0.00000 | 0.00002 | 0.00009 | |
| 0.00000 | 0.00057 | 0.00007 | −0.00003 | |
| 0.00000 | −0.00487 | 0.00057 | 0.00143 | |
| 0.00000 | 0.00015 | −0.00009 | −0.00006 | |
| 0.00000 | −0.00638 | −0.00273 | −0.00399 | |
| 0.00000 | −3.73429 | −0.00009 | −0.00034 | |
| 0.00000 | −2.61961 | 0.00023 | −0.00086 |
| Polynomial Term | p-Value | |||
|---|---|---|---|---|
| Constant | 0.000 | 0.000 | 0.000 | 0.000 |
| 0.000 | 0.001 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.006 | 0.000 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.736 | 0.936 | 0.567 | 0.837 | |
| 0.143 | 0.371 | 0.468 | 0.649 | |
| 0.095 | 0.726 | 0.124 | 0.292 | |
| 0.699 | 0.245 | 0.440 | 0.015 | |
| 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.978 | 0.338 | 0.869 | 0.649 | |
| 0.002 | 0.053 | 0.188 | 0.003 | |
| 0.736 | 0.586 | 0.343 | 1.000 | |
| 0.015 | 0.968 | 0.001 | 0.012 | |
| 0.822 | 1.000 | 0.848 | 0.538 | |
| 0.343 | 0.541 | 0.567 | 0.837 | |
| 0.736 | 0.304 | 0.343 | 0.048 | |
| 0.866 | 0.873 | 0.447 | 0.681 | |
| 0.012 | 0.499 | 0.029 | 0.007 | |
| 0.822 | 1.000 | 0.702 | 0.223 | |
| 0.955 | 1.000 | 0.848 | 0.538 | |
| Source | DF | Sum of Squares | Mean Square | F-Value | p-Value | Contribution (%) |
|---|---|---|---|---|---|---|
| A | 2 | 0.000183 | 0.000092 | 78.80 | 0.000 | 5.05 |
| B | 2 | 0.000166 | 0.000083 | 71.14 | 0.000 | 4.58 |
| C | 2 | 0.000146 | 0.000073 | 62.71 | 0.000 | 4.03 |
| D | 2 | 0.002958 | 0.001479 | 1271.16 | 0.000 | 81.62 |
| E | 2 | 0.000000 | 0.000000 | 0.04 | 0.962 | 0.00 |
| Error | 35 | 0.000041 | 0.000001 | |||
| Total | 45 | 0.003624 |
| Source | DF | Sum of Squares | Mean Square | F-Value | p-Value | Contribution (%) |
|---|---|---|---|---|---|---|
| A | 2 | 2.012 | 1.0060 | 8.12 | 0.001 | 1.87 |
| B | 2 | 14.744 | 7.3719 | 59.53 | 0.000 | 13.68 |
| C | 2 | 1.450 | 0.7248 | 5.85 | 0.006 | 1.35 |
| D | 2 | 79.427 | 39.7137 | 320.71 | 0.000 | 73.71 |
| E | 2 | 0.133 | 0.0664 | 0.54 | 0.590 | 0.12 |
| Error | 35 | 4.334 | 0.1238 | |||
| Total | 45 | 107.751 |
| Source | DF | Sum of Squares | Mean Square | F-Value | p-Value | Contribution (%) |
|---|---|---|---|---|---|---|
| A | 2 | 0.47856 | 0.23928 | 77.67 | 0.000 | 7.99 |
| B | 2 | 0.23341 | 0.11671 | 37.88 | 0.000 | 3.90 |
| C | 2 | 0.20798 | 0.10399 | 33.75 | 0.000 | 3.47 |
| D | 2 | 4.82563 | 2.41281 | 783.21 | 0.000 | 80.59 |
| E | 2 | 0.00081 | 0.00040 | 0.13 | 0.878 | 0.01 |
| Error | 35 | 0.10782 | 0.00308 | |||
| Total | 45 | 5.98814 |
| Source | DF | Sum of Squares | Mean Square | F-Value | p-Value | Contribution (%) |
|---|---|---|---|---|---|---|
| A | 2 | 0.39574 | 0.19787 | 39.07 | 0.000 | 9.81 |
| B | 2 | 0.15007 | 0.07504 | 14.82 | 0.000 | 3.72 |
| C | 2 | 0.19460 | 0.09730 | 19.21 | 0.000 | 4.82 |
| D | 2 | 3.04317 | 1.52158 | 300.43 | 0.000 | 75.44 |
| E | 2 | 0.00077 | 0.00039 | 0.08 | 0.927 | 0.02 |
| Error | 35 | 0.10782 | 0.00308 | |||
| Total | 45 | 4.03381 |
| Prediction | 0.1409 | 11.92 | 5.631 | 5.885 |
| Actual | 0.1400 | 12.38 | 5.618 | 5.762 |
| Error (%) | 0.643 | 3.715 | 0.231 | 2.134 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; He, X.; Li, B.; Shan, Z. An Effective Shrinkage Control Method for Tooth Profile Accuracy Improvement of Micro-Injection-Molded Small-Module Plastic Gears. Polymers 2022, 14, 3114. https://doi.org/10.3390/polym14153114
Wu W, He X, Li B, Shan Z. An Effective Shrinkage Control Method for Tooth Profile Accuracy Improvement of Micro-Injection-Molded Small-Module Plastic Gears. Polymers. 2022; 14(15):3114. https://doi.org/10.3390/polym14153114
Chicago/Turabian StyleWu, Wangqing, Xiansong He, Binbin Li, and Zhiying Shan. 2022. "An Effective Shrinkage Control Method for Tooth Profile Accuracy Improvement of Micro-Injection-Molded Small-Module Plastic Gears" Polymers 14, no. 15: 3114. https://doi.org/10.3390/polym14153114