
Microstructured Magnetoactive Elastomers for Switchable Wettability
 , , , and
, , , and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Synthesis of MAE Materials
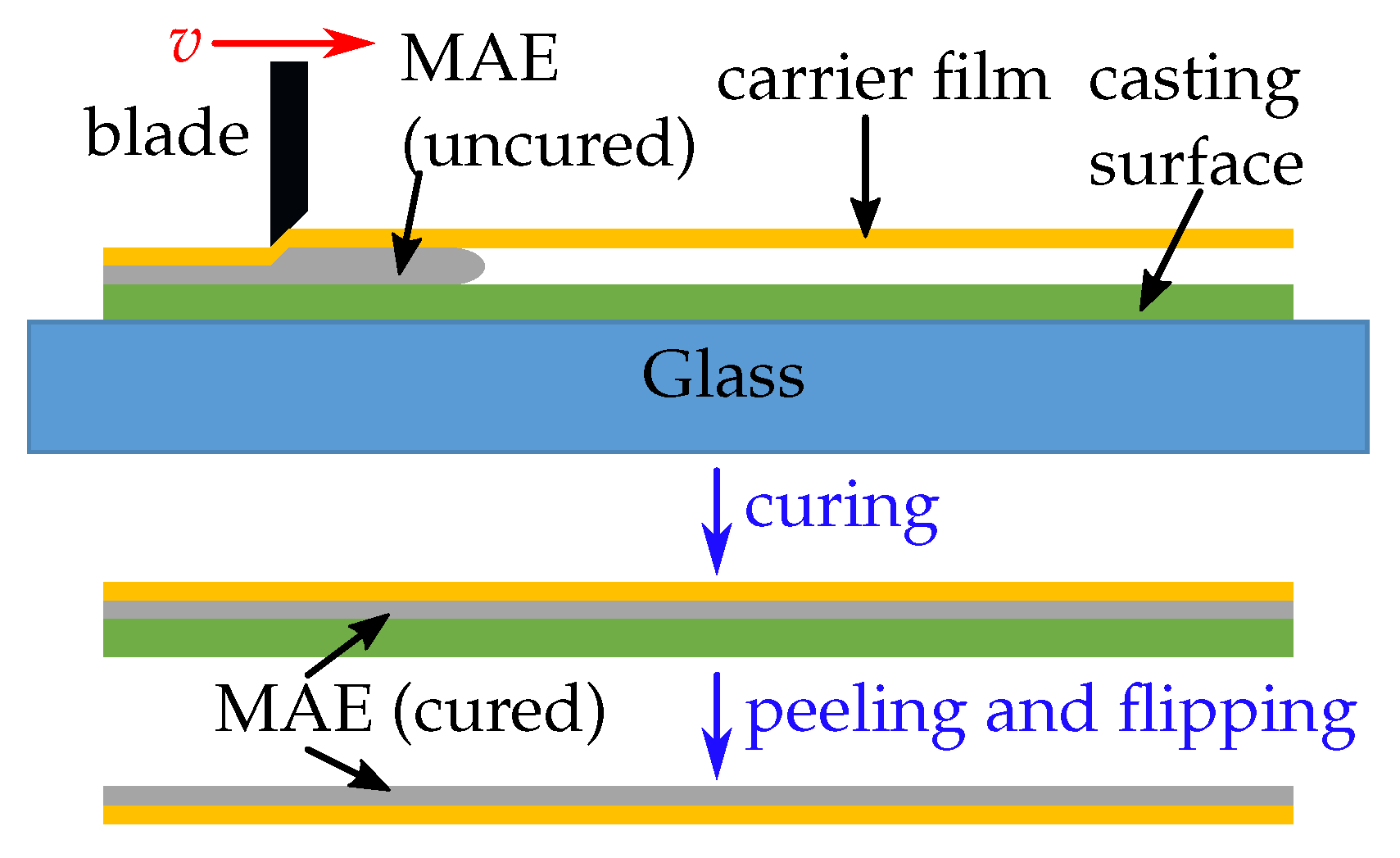
2.2. New Method for Fabrication of MAE Surfaces
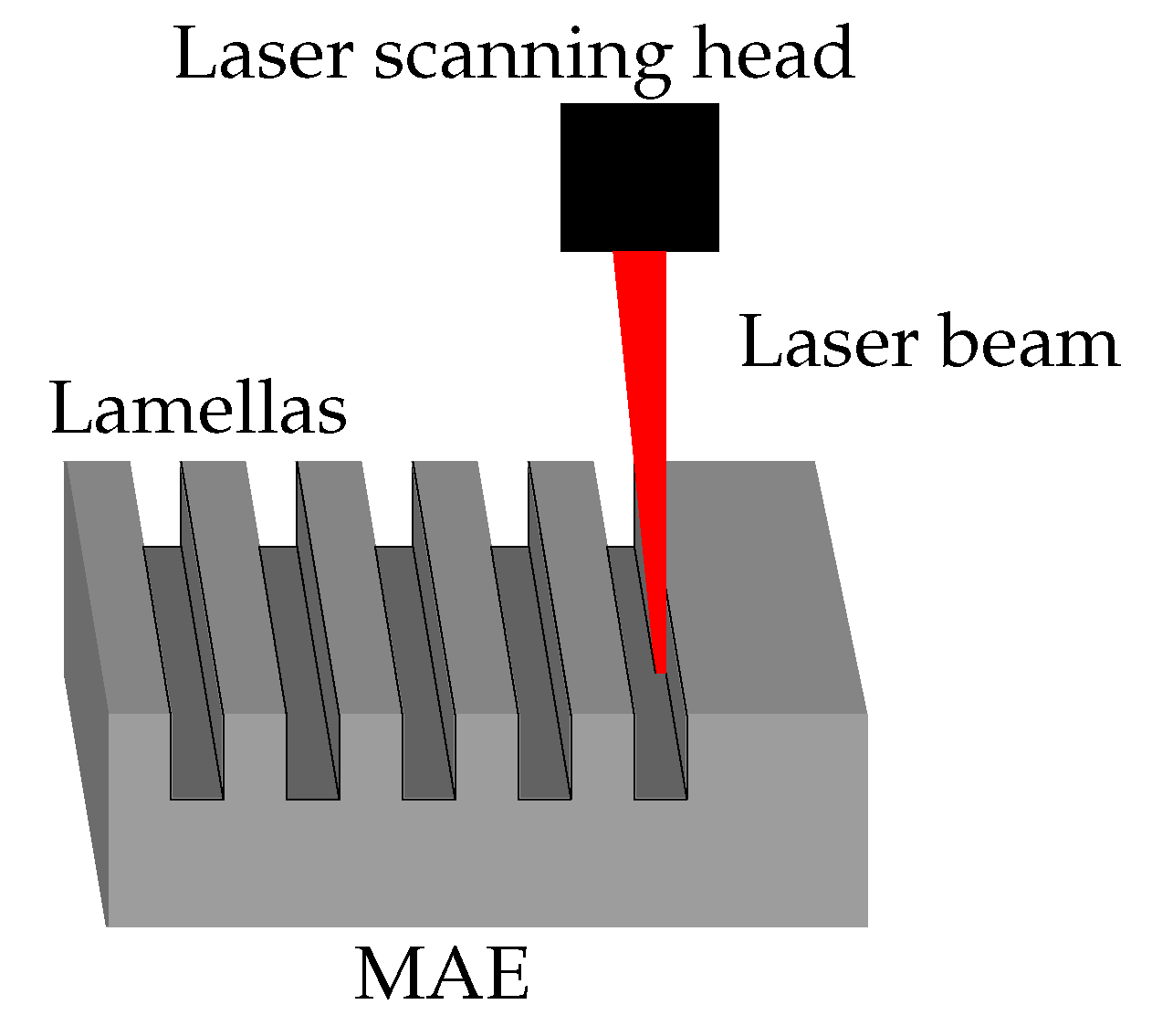
2.3. Laser Micromachining
2.4. Rheological Measurements
2.5. Scanning Electron Microscopy Imaging
2.6. Optical Profilometry
2.7. Contact Angle Measurement Setup
2.8. Static Contact Angle Measurement Protocol and Evaluation
2.9. Statistical Analysis
3. Results
3.1. Characterization of Unstructured MAE Surfaces
3.2. Effect of Laser Surface Ablation on Contact Angle
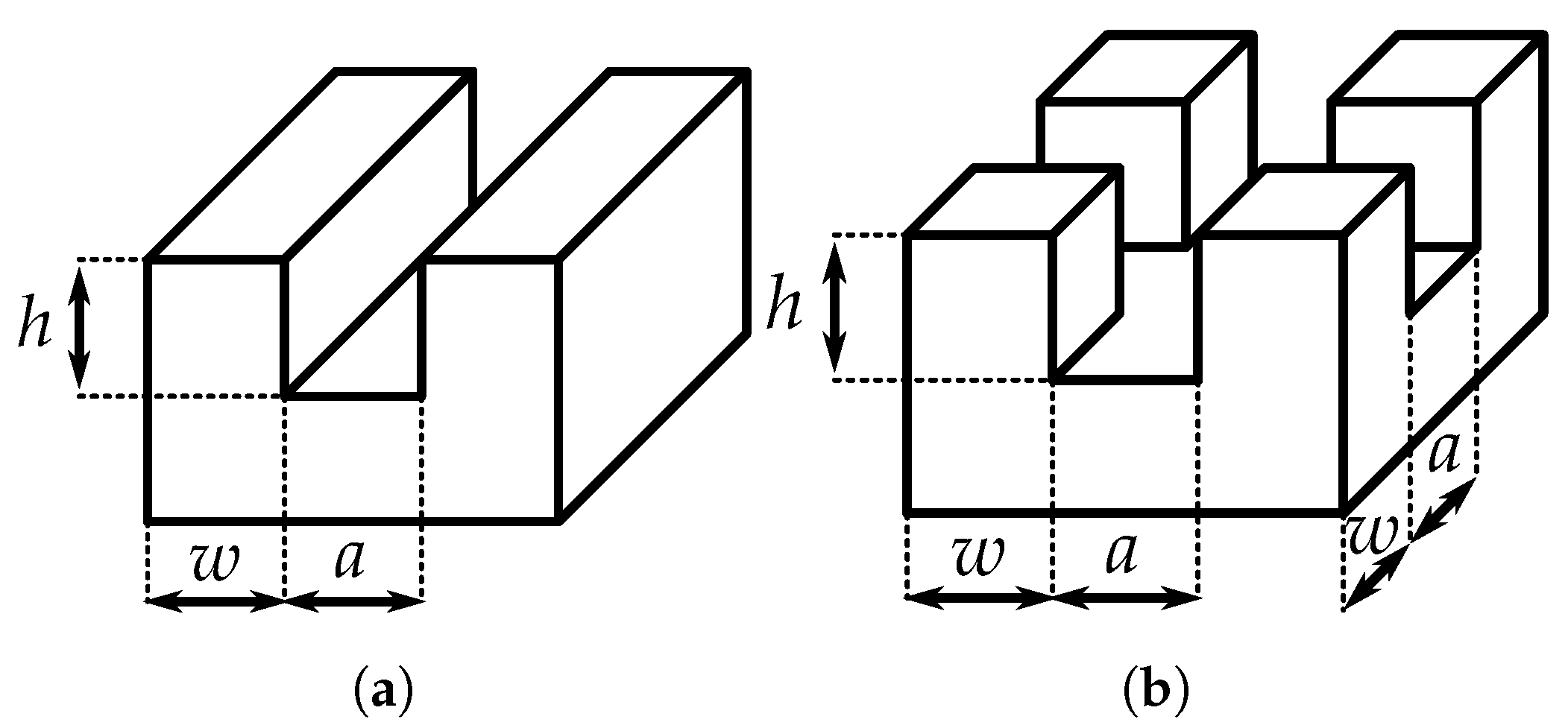
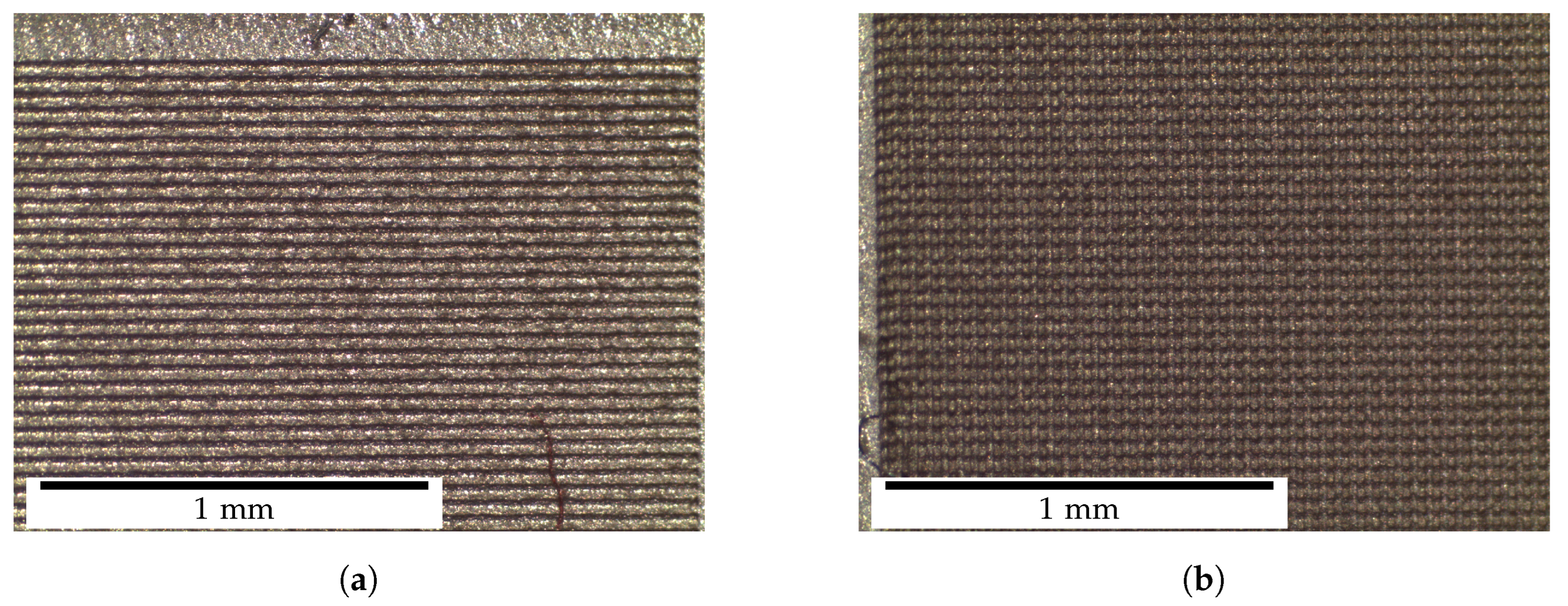
3.3. Effects of Surface Structuring
4. Discussion
5. Conclusions
- A new method of fabricating large area, highly sensitive MAE coatings on plastic substrates creates experimental prerequisites for developing magnetically responsive smart surfaces.
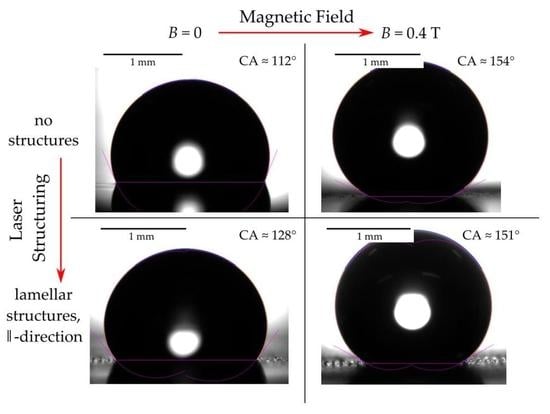
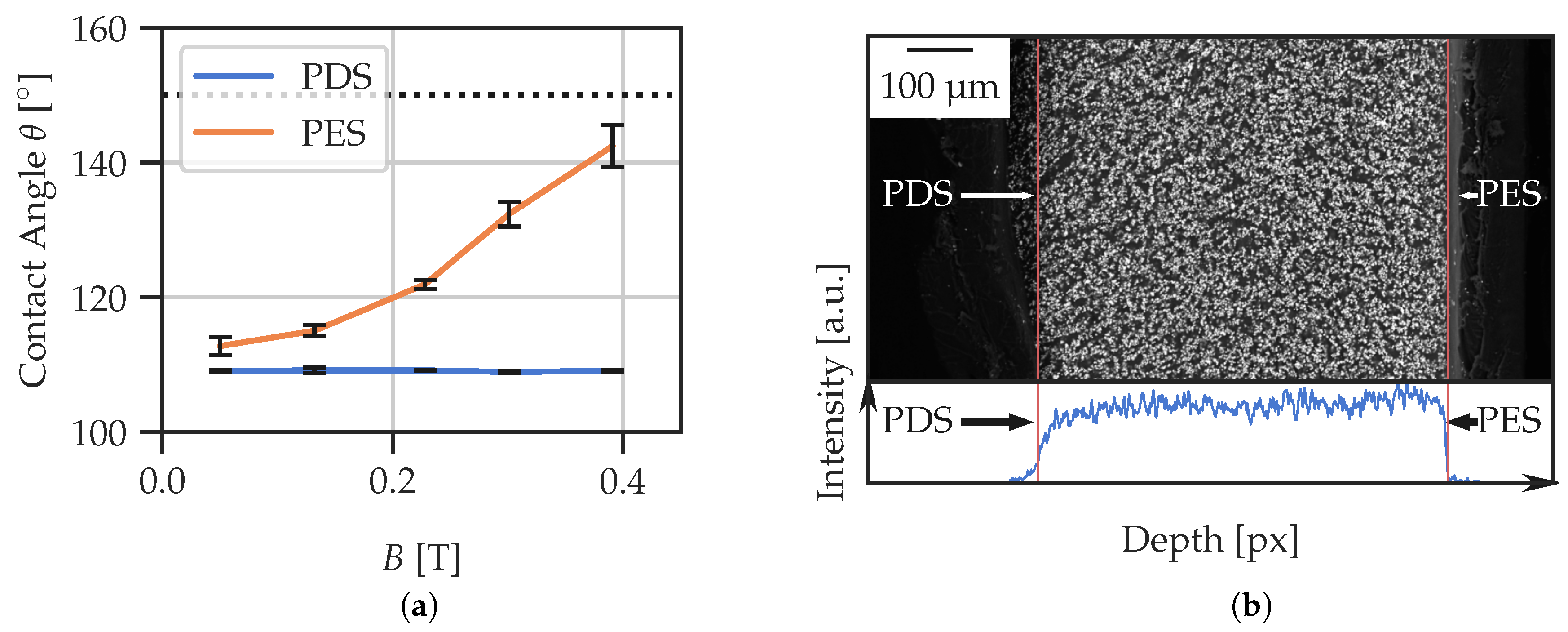
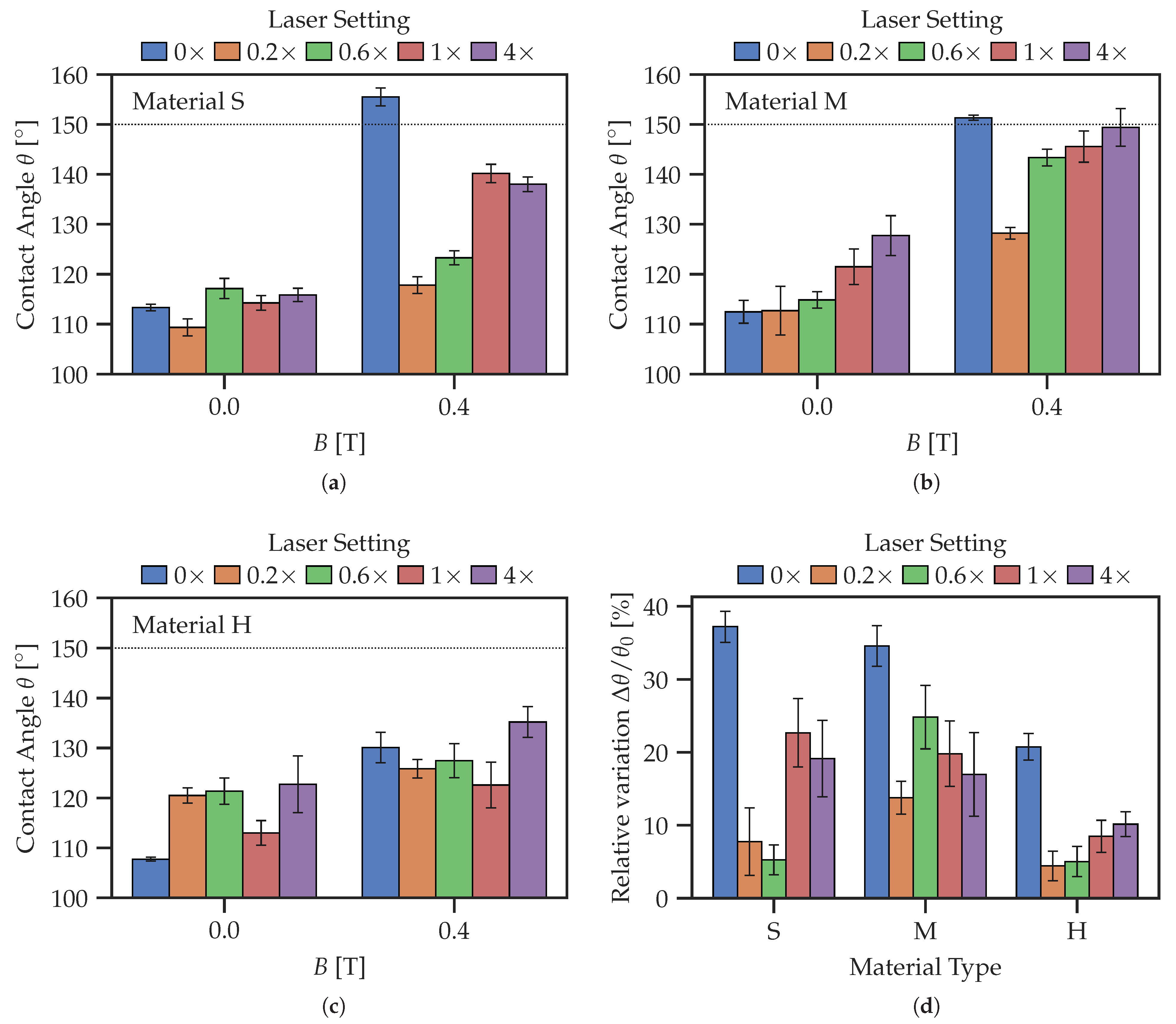
- Our preliminary work has shown that sedimentation of filling particles does have significant influence on the sensitivity of static CA to changes in magnetic field. Usage of the PES allows one to achieve large changes of the CA from (113 ± 1)° in the absence of the field to (156 ± 2)° in the magnetic field of 400 mT. These values compare well with previously published values [43], although no crosslinking in the external magnetic field was required.
- Laser ablation of the entire MAE surface causes the CA to react more weakly to magnetic fields due to surface degradation. However, this reduction of sensitivity to magnetic fields is not monotonic with the increasing value of total laser power used for surface treatment. We observed that the maximum responsiveness of CA to magnetic field is achieved either for the 0.6× or 1× regimes of laser processing.
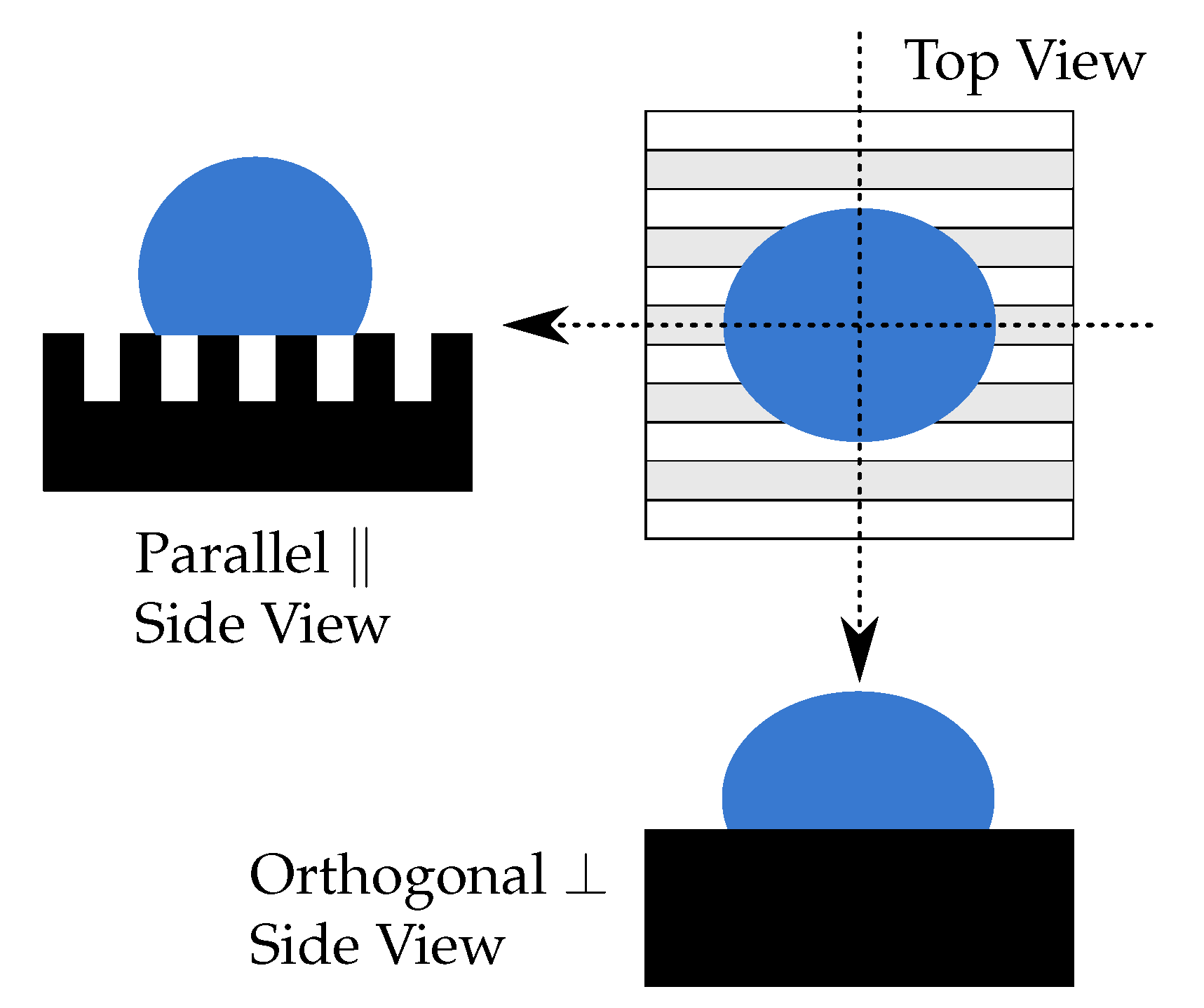
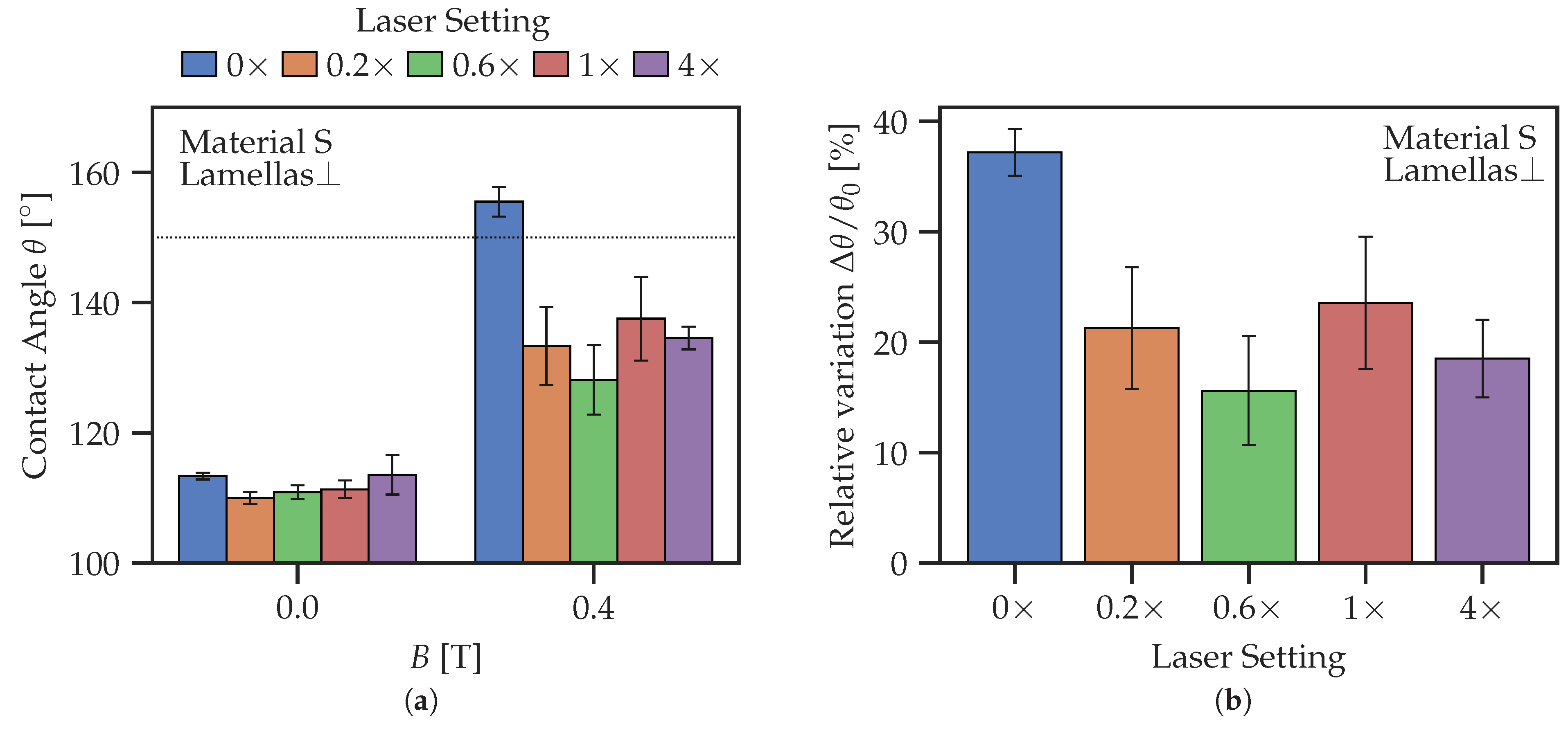
- Direct laser structuring has a significant effect on the wettability of MAE surfaces and their response to magnetic field. In general, the CA becomes larger and superhydrophobicity can be achieved (°). For the lamellar structures, a clearly pronounced anisotropy of the CA with respect to the viewing direction is observed. The highest relative response of CA to magnetic field is obtained for lamellar structures from the softest material in the ⊥-direction, although the absolute change in CA for the ⊥- and ‖-directions of roughly 26° is similar.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CA | Contact angle |
| CB | Cassie–Baxter |
| CIP | Carbonyl iron powder |
| CL | Crosslinker |
| MAE | Magnetoactive elastomer |
| MRS | Magneto-responsive surface |
| PDMS | Polydimethylsiloxane |
| PDS | Particle-depleted side |
| PES | Particle-enriched side |
| PET | Polyethylene terephthalate |
| PS | Polystyrene |
| SEM(-EDS) | Scanning electron microscopy (with energy dispersive spectroscopy) |
| SR | Surface roughness |
| W | Wenzel |
| ⊥ | Orthogonal to the direction of lamellas |
| ‖ | Parallel to the direction of lamellas |
Appendix A
Appendix B
References
- Chen, T.; Ferris, R.; Zhang, J.; Ducker, R.; Zauscher, S. Stimulus-Responsive Polymer Brushes on Surfaces: Transduction Mechanisms and Applications. Prog. Polym. Sci. 2010, 35, 94–112. [Google Scholar] [CrossRef]
- Cabane, E.; Zhang, X.; Langowska, K.; Palivan, C.G.; Meier, W. Stimuli-Responsive Polymers and Their Applications in Nanomedicine. Biointerphases 2012, 7, 9. [Google Scholar] [CrossRef] [PubMed]
- Li, Q. Intelligent Stimuli-Responsive Materials: From Well-Defined Nanostructures to Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chen, J.K.; Chang, C.J. Fabrications and Applications of Stimulus-Responsive Polymer Films and Patterns on Surfaces: A Review. Materials 2014, 7, 805–875. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Sun, Y.; Soh, S. Stimuli-Responsive Surfaces for Tunable and Reversible Control of Wettability. Adv. Mater. 2015, 27, 4062–4068. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Broer, D.J. Responsive Polymer Surfaces: Dynamics in Surface Topography; John Wiley & Sons Incorporated: Newark, NJ, USA, 2017. [Google Scholar]
- Hozumi, A. Stimuli-Responsive Dewetting/Wetting Smart Surfaces and Interfaces; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Genzer, J.; Efimenko, K. Recent Developments in Superhydrophobic Surfaces and Their Relevance to Marine Fouling: A Review. Biofouling 2006, 22, 339–360. [Google Scholar] [CrossRef]
- Stuart, M.A.C.; Huck, W.T.S.; Genzer, J.; Müller, M.; Ober, C.; Stamm, M.; Sukhorukov, G.B.; Szleifer, I.; Tsukruk, V.V.; Urban, M.; et al. Emerging Applications of Stimuli-Responsive Polymer Materials. Nat. Mater. 2010, 9, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Bhushan, B.; Jung, Y.C. Natural and Biomimetic Artificial Surfaces for Superhydrophobicity, Self-Cleaning, Low Adhesion, and Drag Reduction. Prog. Mater. Sci. 2011, 56, 1–108. [Google Scholar] [CrossRef]
- Hatzfeld, C.; Bilz, J.; Fritzsche, T.; Kupnik, M. A Reconfigurable Haptic Joystick Based on Magneto-Rheological Elastomers-System Design and First Evaluation. In Proceedings of the Haptics: Perception, Devices, Control, and Applications; Bello, F., Kajimoto, H., Visell, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 109–119. [Google Scholar] [CrossRef]
- Ichimura, K.; Oh, S.; Nakagawa, M. Light-Driven Motion of Liquids on a Photoresponsive Surface. Science 2000, 288, 1624–1626. [Google Scholar] [CrossRef] [PubMed]
- Feng, C.L.; Zhang, Y.J.; Jin, J.; Song, Y.L.; Xie, L.Y.; Qu, G.R.; Jiang, L.; Zhu, D.B. Reversible Wettability of Photoresponsive Fluorine-Containing Azobenzene Polymer in Langmuir-Blodgett Films. Langmuir 2001, 17, 4593–4597. [Google Scholar] [CrossRef]
- Okano, T.; Kikuchi, A.; Sakurai, Y.; Takei, Y.; Ogata, N. Temperature-Responsive Poly(N-isopropylacrylamide) as a Modulator for Alteration of Hydrophilic/Hydrophobic Surface Properties to Control Activation/Inactivation of Platelets. J. Control. Release 1995, 36, 125–133. [Google Scholar] [CrossRef]
- De Crevoisier, G.; Fabre, P.; Corpart, J.M.; Leibler, L. Switchable Tackiness and Wettability of a Liquid Crystalline Polymer. Science 1999, 285, 1246–1249. [Google Scholar] [CrossRef] [PubMed]
- Carey, D.H.; Ferguson, G.S. A Smart Surface: Entropic Control of Composition at a Polymer/Water Interface. J. Am. Chem. Soc. 1996, 118, 9780–9781. [Google Scholar] [CrossRef]
- Gras, S.L.; Mahmud, T.; Rosengarten, G.; Mitchell, A.; Kalantar-zadeh, K. Intelligent Control of Surface Hydrophobicity. ChemPhysChem 2007, 8, 2036–2050. [Google Scholar] [CrossRef] [PubMed]
- Howarter, J.A.; Youngblood, J.P. Surface Modification of Polymers with 3-Aminopropyltriethoxysilane as a General Pretreatment for Controlled Wettability. Macromolecules 2007, 40, 1128–1132. [Google Scholar] [CrossRef]
- Li, C.; Li, M.; Ni, Z.; Guan, Q.; Blackman, B.R.K.; Saiz, E. Stimuli-Responsive Surfaces for Switchable Wettability and Adhesion. J. R. Soc. Interface 2021, 18, 20210162. [Google Scholar] [CrossRef] [PubMed]
- Kravanja, G.; Belyaeva, I.A.; Hribar, L.; Drevenšek-Olenik, I.; Jezeršek, M.; Shamonin, M. Tunable Drop Splashing on Magnetoactive Elastomers. Adv. Mater. Interfaces 2021, 8, 2100235. [Google Scholar] [CrossRef]
- Kravanja, G.; Belyaeva, I.A.; Hribar, L.; Drevenšek-Olenik, I.; Shamonin, M.; Jezeršek, M. Laser Micromachining of Magnetoactive Elastomers as Enabling Technology for Magnetoresponsive Surfaces. Adv. Mater. Technol. 2022, 7, 2101045. [Google Scholar] [CrossRef]
- Jiang, S.; Hu, Y.; Wu, H.; Li, R.; Zhang, Y.; Chen, C.; Xue, C.; Xu, B.; Zhu, W.; Li, J.; et al. Three-Dimensional Multifunctional Magnetically Responsive Liquid Manipulator Fabricated by Femtosecond Laser Writing and Soft Transfer. Nano Lett. 2020, 20, 7519–7529. [Google Scholar] [CrossRef]
- Chen, S.; Zhu, M.; Zhang, Y.; Dong, S.; Wang, X. Magnetic-Responsive Superhydrophobic Surface of Magnetorheological Elastomers Mimicking from Lotus Leaves to Rose Petals. Langmuir 2021, 37, 2312–2321. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, M.; Shi, W.; Hou, Y.; Liu, C.; Feng, S.; Guo, Z.; Zheng, Y. Dynamic Magnetic Responsive Wall Array with Droplet Shedding-off Properties. Sci. Rep. 2015, 5, 11209. [Google Scholar] [CrossRef]
- Gu, H.; Boehler, Q.; Cui, H.; Secchi, E.; Savorana, G.; De Marco, C.; Gervasoni, S.; Peyron, Q.; Huang, T.Y.; Pane, S.; et al. Magnetic Cilia Carpets with Programmable Metachronal Waves. Nat. Commun. 2020, 11, 2637. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Stogin, B.B.; Sun, N.; Wang, J.; Yang, S.; Wong, T.S. A Switchable Cross-Species Liquid Repellent Surface. Adv. Mater. 2017, 29, 1604641. [Google Scholar] [CrossRef] [PubMed]
- Venkiteswaran, V.K.; Samaniego, L.F.P.; Sikorski, J.; Misra, S. Bio-Inspired Terrestrial Motion of Magnetic Soft Millirobots. IEEE Robot. Autom. Lett. 2019, 4, 1753–1759. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Tan, D.K.; Misra, S. Tandem Actuation of Legged Locomotion and Grasping Manipulation in Soft Robots Using Magnetic Fields. Extrem. Mech. Lett. 2020, 41, 101023. [Google Scholar] [CrossRef]
- Saveleva, M.S.; Eftekhari, K.; Abalymov, A.; Douglas, T.E.L.; Volodkin, D.; Parakhonskiy, B.V.; Skirtach, A.G. Hierarchy of Hybrid Materials—The Place of Inorganics-in-Organics in It, Their Composition and Applications. Front. Chem. 2019, 7, 179. [Google Scholar] [CrossRef]
- Odenbach, S. (Ed.) Magnetic Hybrid-Materials: Multi-Scale Modelling, Synthesis, and Applications; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2021. [Google Scholar]
- Shamonin, M.; Kramarenko, E.Y. Chapter 7-Highly Responsive Magnetoactive Elastomers. In Novel Magnetic Nanostructures; Domracheva, N., Caporali, M., Rentschler, E., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 221–245. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Li, W.; Du, H. A State-of-the-Art Review on Magnetorheological Elastomer Devices. Smart Mater. Struct. 2014, 23, 123001. [Google Scholar] [CrossRef]
- Ubaidillah; Sutrisno, J.; Purwanto, A.; Mazlan, S.A. Recent Progress on Magnetorheological Solids: Materials, Fabrication, Testing, and Applications. Adv. Eng. Mater. 2015, 17, 563–597. [Google Scholar] [CrossRef]
- Menzel, A.M. Tuned, Driven, and Active Soft Matter. Phys. Rep. 2015, 554, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Lopez, M.T.; Durán, J.D.G.; Iskakova, L.Y.; Zubarev, A.Y. Mechanics of Magnetopolymer Composites: A Review. J. Nanofluids 2016, 5, 479–495. [Google Scholar] [CrossRef]
- Cantera, M.A.; Behrooz, M.; Gibson, R.F.; Gordaninejad, F. Modeling of Magneto-Mechanical Response of Magnetorheological Elastomers (MRE) and MRE-based Systems: A Review. Smart Mater. Struct. 2017, 26, 023001. [Google Scholar] [CrossRef]
- Weeber, R.; Hermes, M.; Schmidt, A.M.; Holm, C. Polymer Architecture of Magnetic Gels: A Review. J. Phys. Condens. Matter 2018, 30, 063002. [Google Scholar] [CrossRef]
- Liu, T.; Xu, Y. Magnetorheological Elastomers: Materials and Applications. In Smart and Functional Soft Materials; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef]
- Morillas, J.R.; de Vicente, J. Magnetorheology: A Review. Soft Matter 2020, 16, 9614–9642. [Google Scholar] [CrossRef]
- Arslan Hafeez, M.; Usman, M.; Umer, M.A.; Hanif, A. Recent Progress in Isotropic Magnetorheological Elastomers and Their Properties: A Review. Polymers 2020, 12, 3023. [Google Scholar] [CrossRef]
- Bastola, A.K.; Hossain, M. A Review on Magneto-Mechanical Characterizations of Magnetorheological Elastomers. Compos. Part B Eng. 2020, 200, 108348. [Google Scholar] [CrossRef]
- Bastola, A.K.; Hossain, M. The Shape – Morphing Performance of Magnetoactive Soft Materials. Mater. Des. 2021, 211, 110172. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Sokolov, B.O.; Stepanov, G.V.; Kramarenko, E.Y. Controllable Hydrophobicity of Magnetoactive Elastomer Coatings. J. Magn. Magn. Mater. 2018, 459, 268–271. [Google Scholar] [CrossRef]
- Glavan, G.; Salamon, P.; Belyaeva, I.A.; Shamonin, M.; Drevenšek-Olenik, I. Tunable Surface Roughness and Wettability of a Soft Magnetoactive Elastomer. J. Appl. Polym. Sci. 2018, 135, 46221. [Google Scholar] [CrossRef]
- Watanabe, M.; Tanaka, Y.; Murakami, D.; Tanaka, M.; Kawai, M.; Mitsumata, T. Optimal Plasticizer Content for Magnetic Elastomers Used for Cell Culture Substrate. Chem. Lett. 2020, 49, 280–283. [Google Scholar] [CrossRef]
- Sánchez, P.A.; S. Minina, E.; S. Kantorovich, S.; Yu. Kramarenko, E. Surface Relief of Magnetoactive Elastomeric Films in a Homogeneous Magnetic Field: Molecular Dynamics Simulations. Soft Matter 2019, 15, 175–189. [Google Scholar] [CrossRef]
- Li, R.; Wang, D.; Yang, P.a.; Tang, X.; Liu, J.; Li, X. Improved Magneto-Sensitive Adhesion Property of Magnetorheological Elastomers Modified Using Graphene Nanoplatelets. Ind. Eng. Chem. Res. 2020, 59, 9143–9151. [Google Scholar] [CrossRef]
- Li, R.; Wang, D.; Li, X.; Liao, C.; Yang, P.a.; Ruan, H.; Shou, M.; Luo, J.; Wang, X. Study on Sliding Friction Characteristics of Magnetorheological Elastomer—Copper Pair Affected by Magnetic-Controlled Surface Roughness and Elastic Modulus. Smart Mater. Struct. 2021, 31, 015030. [Google Scholar] [CrossRef]
- Knieling, H.; Richter, R.; Rehberg, I.; Matthies, G.; Lange, A. Growth of Surface Undulations at the Rosensweig Instability. Phys. Rev. E 2007, 76, 066301. [Google Scholar] [CrossRef] [PubMed]
- Cvek, M.; Mrlik, M.; Sevcik, J.; Sedlacik, M. Tailoring Performance, Damping, and Surface Properties of Magnetorheological Elastomers via Particle-Grafting Technology. Polymers 2018, 10, 1411. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Bonaccurso, E.; Gambaryan-Roisman, T.; Starov, V.; Koursari, N.; Zhao, Y. Static and Dynamic Wetting of Soft Substrates. Curr. Opin. Colloid Interface Sci. 2018, 36, 46–57. [Google Scholar] [CrossRef]
- Glavan, G.; Kettl, W.; Brunhuber, A.; Shamonin, M.; Drevenšek-Olenik, I. Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers. Polymers 2019, 11, 594. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Li, X.; Yang, P.a.; Liu, J.; Chen, S. The Field-Dependent Surface Roughness of Magnetorheological Elastomer: Numerical Simulation and Experimental Verification. Smart Mater. Struct. 2019, 28, 085018. [Google Scholar] [CrossRef]
- Nadzharyan, T.A.; Stolbov, O.V.; Raikher, Y.L.; Kramarenko, E.Y. Field-Induced Surface Deformation of Magnetoactive Elastomers with Anisometric Fillers: A Single-Particle Model. Soft Matter 2019, 15, 9507–9519. [Google Scholar] [CrossRef]
- Psarra, E.; Bodelot, L.; Danas, K. Two-Field Surface Pattern Control via Marginally Stable Magnetorheological Elastomers. Soft Matter 2017, 13, 6576–6584. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, S.; Tian, X. Magnetoresponsive Surfaces for Manipulation of Nonmagnetic Liquids: Design and Applications. Adv. Funct. Mater. 2020, 30, 1906507. [Google Scholar] [CrossRef]
- Kovalev, A.; Belyaeva, I.A.; von Hofen, C.; Gorb, S.; Shamonin, M. Magnetically Switchable Adhesion and Friction of Soft Magnetoactive Elastomers. Adv. Eng. Mater. 2022, 2200372. [Google Scholar] [CrossRef]
- Bodnaruk, A.V.; Brunhuber, A.; Kalita, V.M.; Kulyk, M.M.; Kurzweil, P.; Snarskii, A.A.; Lozenko, A.F.; Ryabchenko, S.M.; Shamonin, M. Magnetic Anisotropy in Magnetoactive Elastomers, Enabled by Matrix Elasticity. Polymer 2019, 162, 63–72. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Shamonin, M. Magnetodielectric Effect in Magnetoactive Elastomers: Transient Response and Hysteresis. Polymer 2017, 127, 119–128. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Belyaeva, I.A.; Shamonin, M.; Kramarenko, E.Y. Magnetorheological Response of Highly Filled Magnetoactive Elastomers from Perspective of Mechanical Energy Density: Fractal Aggregates above the Nanometer Scale? Phys. Rev. E 2017, 95, 062501. [Google Scholar] [CrossRef] [PubMed]
- Davis, L.C. Model of Magnetorheological Elastomers. J. Appl. Phys. 1999, 85, 3348–3351. [Google Scholar] [CrossRef]
- Fakhree, M.A.M.; Nordin, N.A.; Nazmi, N.; Mazlan, S.A.; Aziz, S.A.A.; Ubaidillah, U.; Ahmad, F.; Choi, S.B. Field-Dependent Rheological Properties of Magnetorheological Elastomer with Fountain-Like Particle Chain Alignment. Micromachines 2022, 13, 492. [Google Scholar] [CrossRef]
- Mazurek, P.; Vudayagiri, S.; Ladegaard Skov, A. How to Tailor Flexible Silicone Elastomers with Mechanical Integrity: A Tutorial Review. Chem. Soc. Rev. 2019, 48, 1448–1464. [Google Scholar] [CrossRef]
- Boczkowska, A.; Awietjan, S. Chapter 6-Microstructure and Properties of Magnetorheological Elastomers. In Advanced Elastomers-Technology, Properties and Applications; Boczkowska, A., Ed.; InTech: London, UK, 2012; p. 412. [Google Scholar] [CrossRef]
- Gwyddion – Free SPM (AFM, SNOM/NSOM, STM, MFM, …) Data Analysis Software. Available online: http://gwyddion.net/ (accessed on 6 April 2022).
- Nečas, D.; Klapetek, P. Gwyddion: An Open-Source Software for SPM Data Analysis. Open Phys. 2012, 10, 181–188. [Google Scholar] [CrossRef]
- Huhtamäki, T.; Tian, X.; Korhonen, J.T.; Ras, R.H.A. Surface-Wetting Characterization Using Contact-Angle Measurements. Nat. Protoc. 2018, 13, 1521–1538. [Google Scholar] [CrossRef]
- OpenCV: Structural Analysis and Shape Descriptors. Available online: https://docs.opencv.org/4.x/d3/dc0/group__imgproc__shape.html (accessed on 16 August 2022).
- Fitzgibbon, A.; Fisher, R. A Buyer’s Guide to Conic Fitting. In Proceedings of the British Machine Vision Conference 1995; British Machine Vision Association: Durham, UK, 1995; p. 51. [Google Scholar] [CrossRef]
- Bico, J.; Marzolin, C.; Quéré, D. Pearl Drops. Europhys. Lett. EPL 1999, 47, 220–226. [Google Scholar] [CrossRef]
- Chen, Y.; He, B.; Lee, J.; Patankar, N.A. Anisotropy in the Wetting of Rough Surfaces. J. Colloid Interface Sci. 2005, 281, 458–464. [Google Scholar] [CrossRef]
- Gau, H.; Herminghaus, S.; Lenz, P.; Lipowsky, R. Liquid Morphologies on Structured Surfaces: From Microchannels to Microchips. Science 1999, 283, 46–49. [Google Scholar] [CrossRef] [PubMed]
- Guan, X.; Dong, X.; Ou, J. Magnetostrictive Effect of Magnetorheological Elastomer. J. Magn. Magn. Mater. 2008, 320, 158–163. [Google Scholar] [CrossRef]
- Romeis, D.; Metsch, P.; Kästner, M.; Saphiannikova, M. Theoretical Models for Magneto-Sensitive Elastomers: A Comparison between Continuum and Dipole Approaches. Phys. Rev. E 2017, 95, 042501. [Google Scholar] [CrossRef] [PubMed]
- Stolbov, O.V.; Raikher, Y.L. Magnetostriction Effect in Soft Magnetic Elastomers. Arch. Appl. Mech. 2019, 89, 63–76. [Google Scholar] [CrossRef]
- Saveliev, D.V.; Belyaeva, I.A.; Chashin, D.V.; Fetisov, L.Y.; Romeis, D.; Kettl, W.; Kramarenko, E.Y.; Saphiannikova, M.; Stepanov, G.V.; Shamonin, M. Giant Extensional Strain of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Materials 2020, 13, 3297. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Borin, D.Y.; Raikher, Y.L.; Melenev, P.V.; Perov, N.S. Motion of Ferroparticles inside the Polymeric Matrix in Magnetoactive Elastomers. J. Phys. Condens. Matter 2008, 20, 204121. [Google Scholar] [CrossRef]
- Biller, A.M.; Stolbov, O.V.; Raikher, Y.L. Mesoscopic Magnetomechanical Hysteresis in a Magnetorheological Elastomer. Phys. Rev. E 2015, 92, 023202. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Stepanov, G.V.; Shamonin, M.; Monkman, G.J.; Khokhlov, A.R.; Kramarenko, E.Y. Hysteresis of the Viscoelastic Properties and the Normal Force in Magnetically and Mechanically Soft Magnetoactive Elastomers: Effects of Filler Composition, Strain Amplitude and Magnetic Field. Polymer 2015, 76, 191–202. [Google Scholar] [CrossRef]
- Zubarev, A.Y.; Chirikov, D.N.; Borin, D.Y.; Stepanov, G.V. Hysteresis of the Magnetic Properties of Soft Magnetic Gels. Soft Matter 2016, 12, 6473–6480. [Google Scholar] [CrossRef]
- Bodas, D.; Khan-Malek, C. Formation of More Stable Hydrophilic Surfaces of PDMS by Plasma and Chemical Treatments. Microelectron. Eng. 2006, 83, 1277–1279. [Google Scholar] [CrossRef]
- Trantidou, T.; Elani, Y.; Parsons, E.; Ces, O. Hydrophilic Surface Modification of PDMS for Droplet Microfluidics Using a Simple, Quick, and Robust Method via PVA Deposition. Microsyst. Nanoeng. 2017, 3, 16091. [Google Scholar] [CrossRef] [PubMed]
- Bormashenko, E.Y. Wetting Real Surfaces, Vol. 19, De Gruyter Studies in Mathematical Physics; De Gruyter: Berlin, Germany, 2019. [Google Scholar] [CrossRef]
- Wenzel, R.N. Resistance of Solid Surfaces to Wetting by Water. Ind. Eng. Chem. 1936, 28, 988–994. [Google Scholar] [CrossRef]
- Gao, N.; Yan, Y. Modeling Superhydrophobic Contact Angles and Wetting Transition. J. Bionic Eng. 2009, 6, 335–340. [Google Scholar] [CrossRef]
- Bormashenko, E. Progress in Understanding Wetting Transitions on Rough Surfaces. Adv. Colloid Interface Sci. 2015, 222, 92–103. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Shi, F.; Niu, J.; Jiang, Y.; Wang, Z. Superhydrophobic Surfaces: From Structural Control to Functional Application. J. Mater. Chem. 2008, 18, 621–633. [Google Scholar] [CrossRef]
- Cortese, B.; D’Amone, S.; Manca, M.; Viola, I.; Cingolani, R.; Gigli, G. Superhydrophobicity Due to the Hierarchical Scale Roughness of PDMS Surfaces. Langmuir 2008, 24, 2712–2718. [Google Scholar] [CrossRef]
- Gao, L.; McCarthy, T.J. “Artificial Lotus Leaf” Prepared Using a 1945 Patent and a Commercial Textile. Langmuir 2006, 22, 5998–6000. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, Z.; Huang, W.; Zeng, H.; Mandić, V.; Hu, X.; Zhao, L.; Zhang, X. Spontaneous Adsorption-Induced Salvinia-like Micropillars with High Adhesion. Langmuir 2021, 37, 6728–6735. [Google Scholar] [CrossRef]
- Peters, A.M.; Pirat, C.; Sbragaglia, M.; Borkent, B.M.; Wessling, M.; Lohse, D.; Lammertink, R.G.H. Cassie-Baxter to Wenzel State Wetting Transition: Scaling of the Front Velocity. Eur. Phys. J. E 2009, 29, 391–397. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | CIP | VS 100,000 | MV 2000 | AK10 | Modifier | CL 210 | Inhibitor | Catalyst |
|---|---|---|---|---|---|---|---|---|
| Soft (S) | 74.625 | 7.128 | 1.283 | 16.713 | 0.025 | 0.114 | 0.027 | 0.085 |
| Medium (M) | 74.927 | 7.026 | 1.282 | 16.505 | 0.025 | 0.117 | 0.030 | 0.088 |
| Hard (H) | 74.825 | 7.063 | 1.272 | 16.559 | 0.025 | 0.130 | 0.029 | 0.097 |
| Material | Shear Storage Modulus G’ [Pa] | Shear Loss Modulus G” [Pa] |
|---|---|---|
| Soft (S) | 8717 ± 71 | 2168 ± 5 |
| Medium (M) | 14,516 ± 69 | 2775 ± 5 |
| Hard (H) | 22,085 ± 198 | 2188 ± 28 |
| Setting | Passages | Laser Power [W] | Structure Depth h [ µm] |
|---|---|---|---|
| 0× | Unprocessed Surface | - | 0 |
| 0.2× | 1 | 4 | ≈3 |
| 0.6× | 1 | 12 | ≈9 |
| 1× | 1 | 20 | ≈15 |
| 4× | 4 | 20 | ≈60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kriegl, R.; Kravanja, G.; Hribar, L.; Čoga, L.; Drevenšek-Olenik, I.; Jezeršek, M.; Kalin, M.; Shamonin, M. Microstructured Magnetoactive Elastomers for Switchable Wettability. Polymers 2022, 14, 3883. https://doi.org/10.3390/polym14183883
Kriegl R, Kravanja G, Hribar L, Čoga L, Drevenšek-Olenik I, Jezeršek M, Kalin M, Shamonin M. Microstructured Magnetoactive Elastomers for Switchable Wettability. Polymers. 2022; 14(18):3883. https://doi.org/10.3390/polym14183883
Chicago/Turabian StyleKriegl, Raphael, Gaia Kravanja, Luka Hribar, Lucija Čoga, Irena Drevenšek-Olenik, Matija Jezeršek, Mitjan Kalin, and Mikhail Shamonin. 2022. "Microstructured Magnetoactive Elastomers for Switchable Wettability" Polymers 14, no. 18: 3883. https://doi.org/10.3390/polym14183883