
Multifunctional Slippery Polydimethylsiloxane/Carbon Nanotube Composite Strain Sensor with Excellent Liquid Repellence and Anti-Icing/Deicing Performance

 and
and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Experiments
2.1. Materials
2.2. Instruments and Characterizations
3. Experiment Results and Discussion
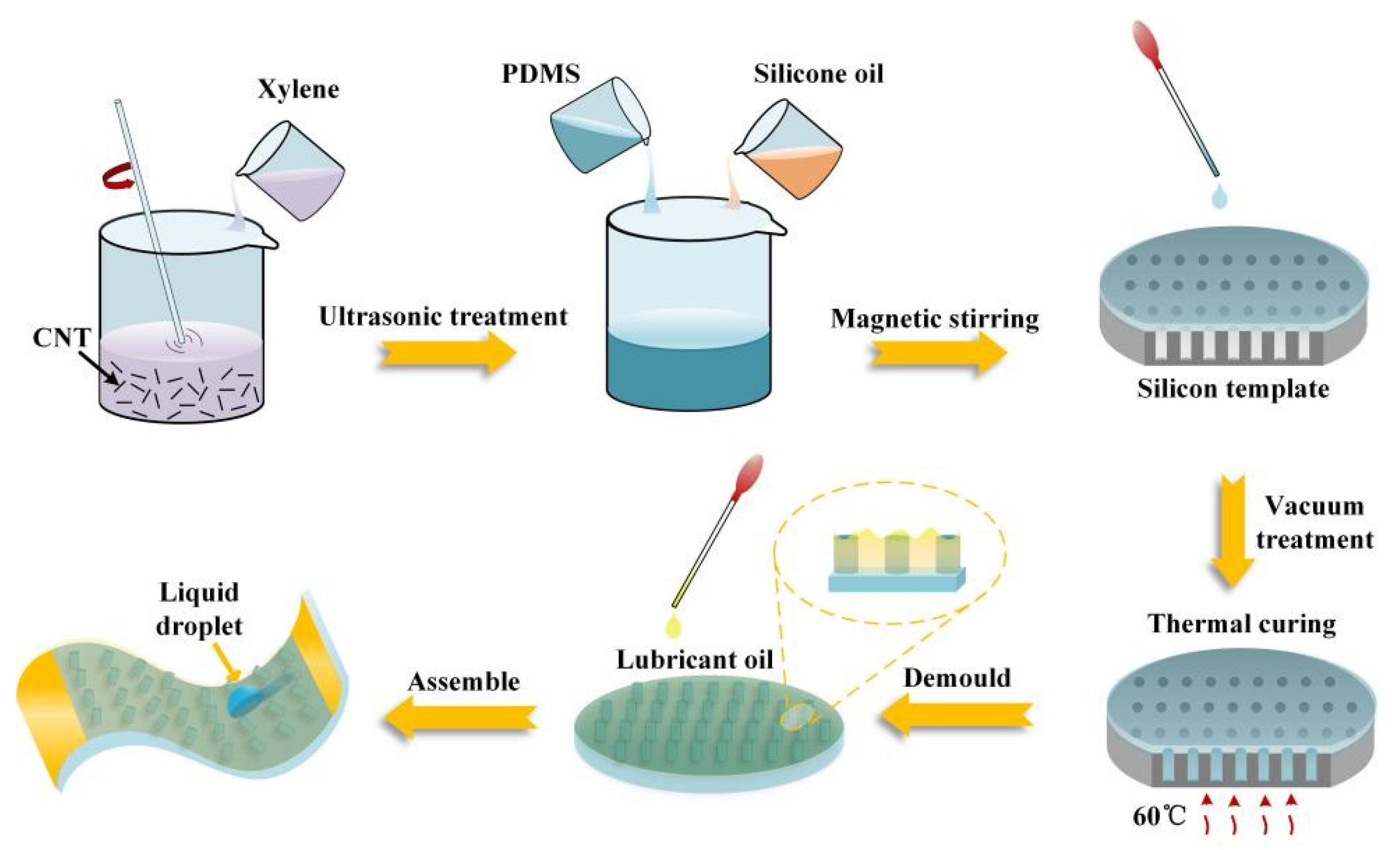
3.1. Fabrication and Characterization of the Slippery PDMS/CNT Composite Strain Sensor
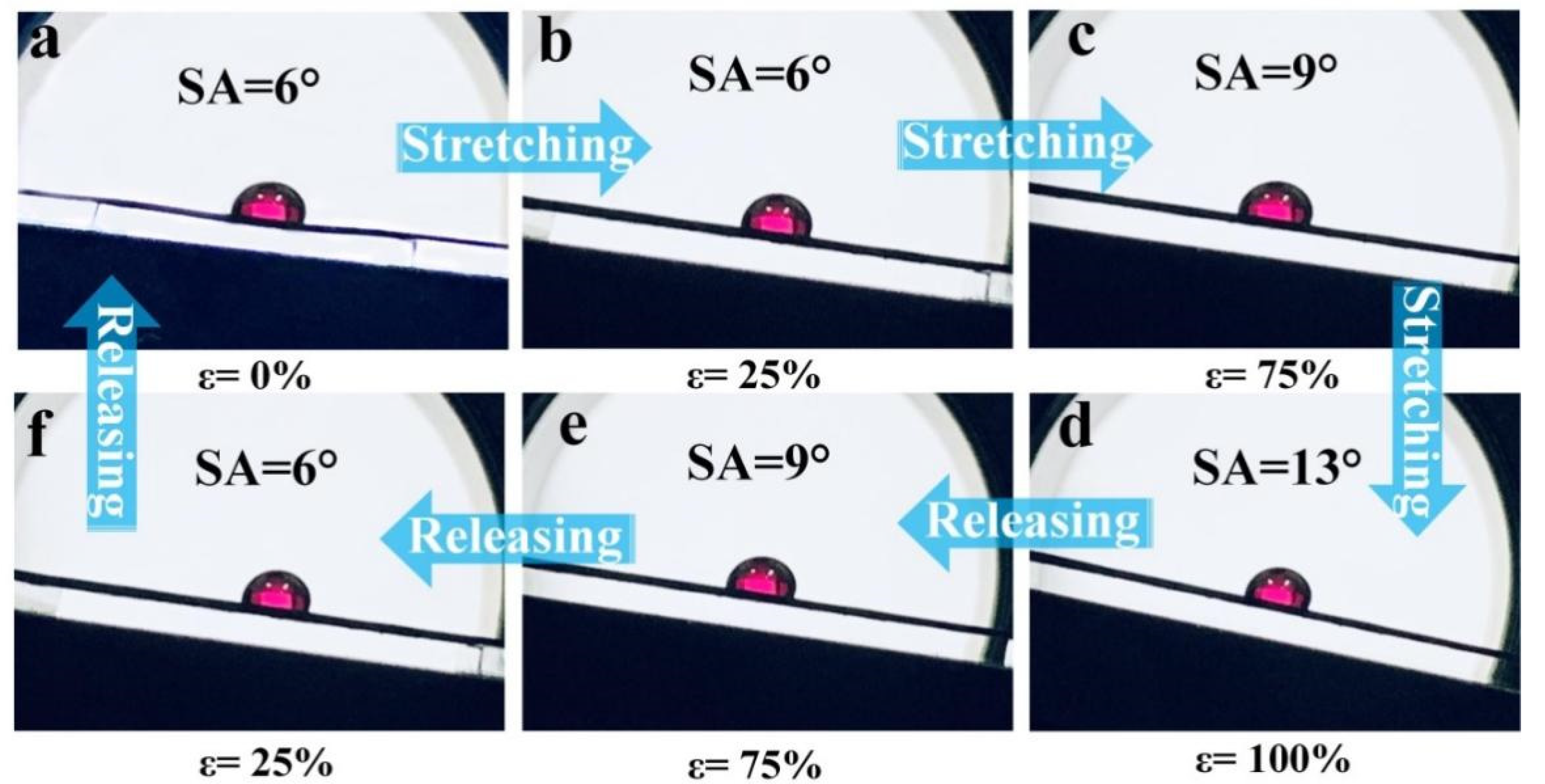
3.2. The Wetting Behavior and Liquid Repellence Property of the Slippery PDMS/CNT Composite Strain Sensor
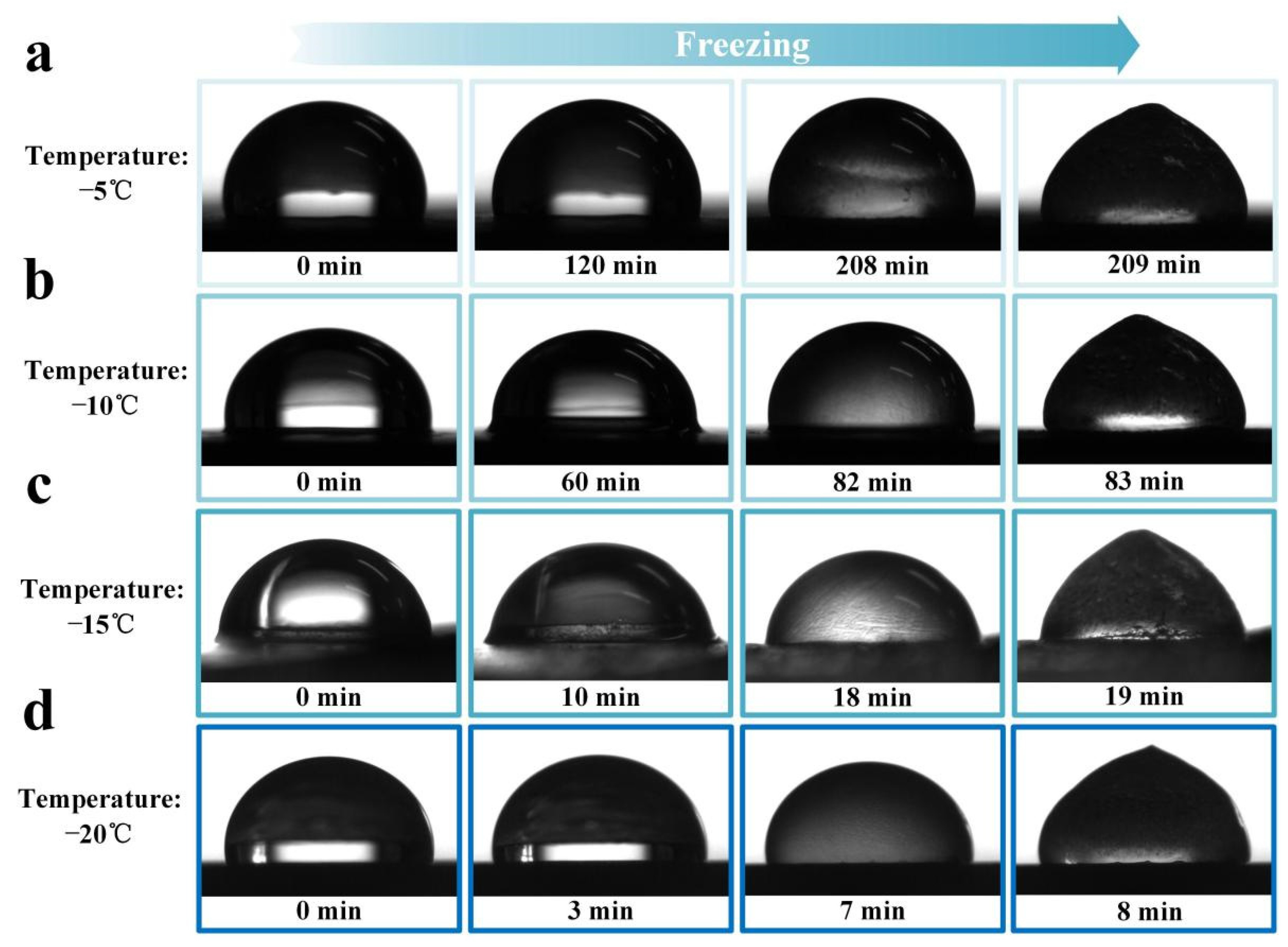
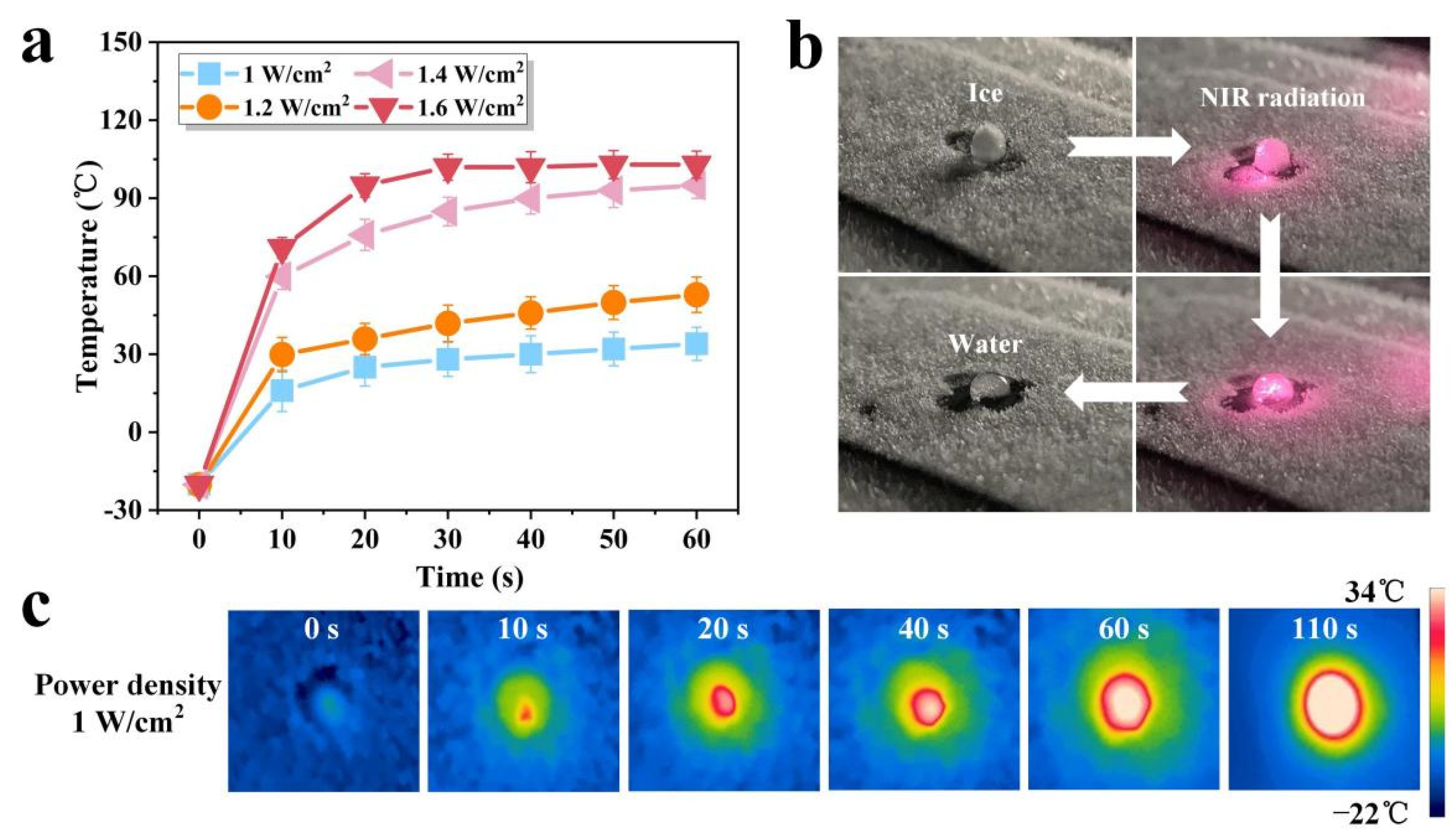
3.3. The Anti-Icing/Deicing Property under Low Temperature
3.4. Sensing Performance of the Slippery PDMS/CNT Composite Strain Sensor
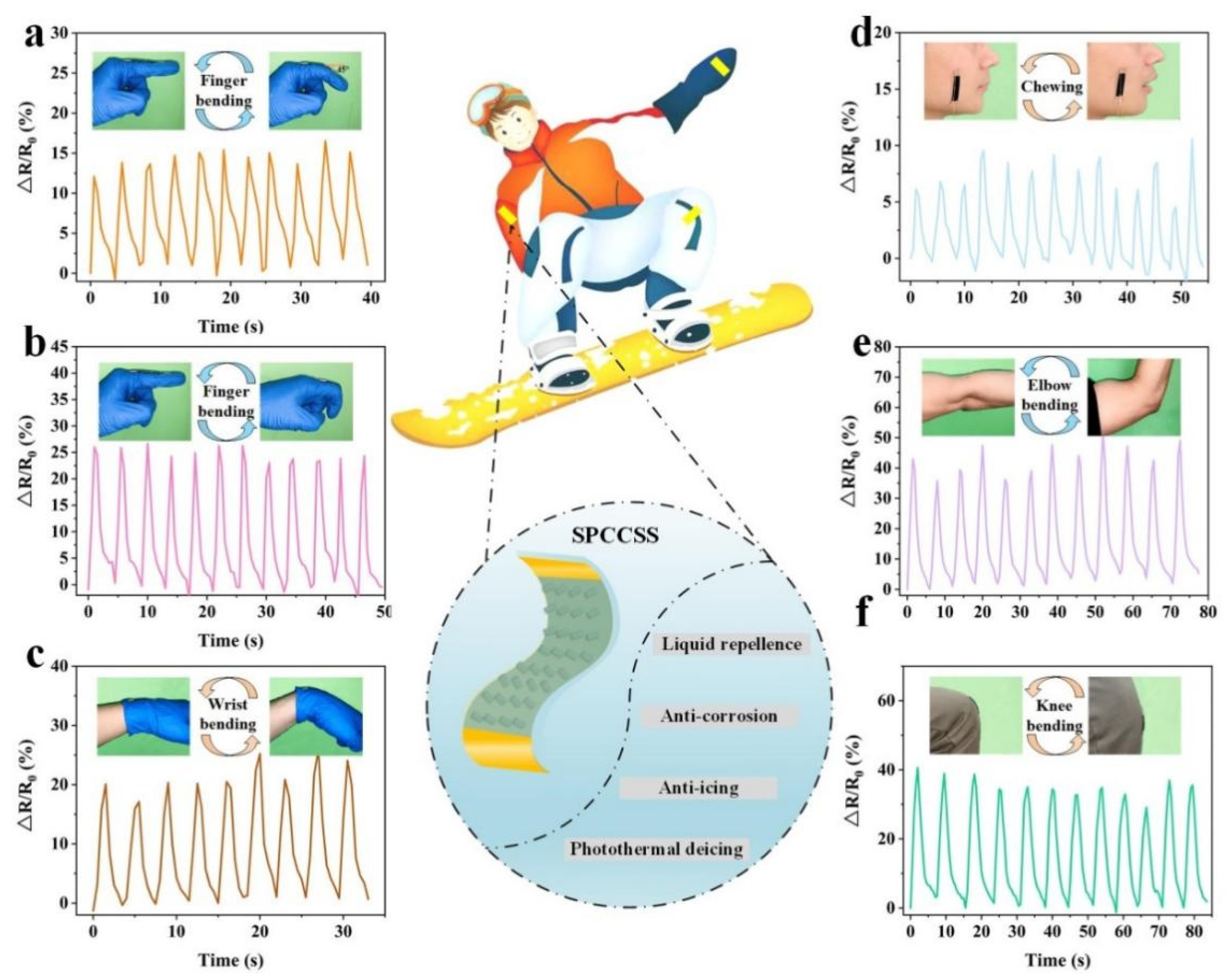
3.5. Application of the Slippery PDMS/CNT Composite Strain Sensor
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Kim, S.; Lee, J.; Yang, D.; Park, B.C.; Ryu, S.; Park, I. A stretchable strain sensor based on a metal nanoparticle thin film for human motion detection. Nanoscale 2014, 6, 11932–11939. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.J.; Dai, K.; Zhai, Y.; Liu, H.; Zhan, P.F.; Gao, J.C.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. Flexible and lightweight pressure sensor based on carbon nanotube/thermoplastic polyurethane aligned conductive foam with superior compressibility and stability. ACS Appl. Mater. Interfaces 2017, 9, 42266–42277. [Google Scholar] [CrossRef]
- Hu, L.; Huang, W.; Gao, J.C.; Dai, K.; Zheng, G.; Liu, C.T.; Shen, C.Y.; Yan, X.R.; Guo, J.; Guo, Z.H. Piezoresistive behavior of porous carbon nanotube-thermoplastic polyurethane conductive nanocomposites with ultrahigh compressibility. Appl. Phys. Lett. 2016, 108, 918–924. [Google Scholar]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat. Mater. 2016, 15, 937–950. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, C.K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Li, Y.L.; Dai, K.; Yan, W.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. A highly stretchable and stable strain sensor based on hybrid carbon nanofillers/polydimethylsiloxane conductive composites for large human motions monitoring. Compos. Sci. Technol. 2018, 156, 276–286. [Google Scholar] [CrossRef]
- Wang, Y.L.; Hao, J.; Huang, Z.Q.; Zheng, G.Q.; Dai, K.; Liu, C.T.; Shen, C.Y. Flexible electrically resistive-type strain sensors based on reduced graphene oxide-decorated electrospun polymer fibrous mats for human motion monitoring. Carbon 2017, 126, 360–371. [Google Scholar] [CrossRef]
- Zang, J.F.; Ryu, S.H.; Pugno, N.; Wang, Q.M.; Tu, Q.; Buehler, M.J.; Zhao, X.H. Multifunctionality and control of the crumpling and unfolding of large-area grapheme. Nat. Mater. 2013, 12, 321–325. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.J.; Song, W.; Yi, Y.; Min, B.K.; Mondal, S.; An, K.S.; Choi, C.G. High durability and waterproofing RGO/SWCNTs fabric-based multifunctional sensors for human-motion detection. ACS Appl. Mater. Interfaces 2018, 10, 3921–3928. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Bai, Y.; Li, L.; Wang, S.; Zhang, T. A superhydrophobic smart coating for flexible and wearable sensing electronics. Adv. Mater. 2017, 29, 1702517. [Google Scholar] [CrossRef]
- Zu, G.; Wang, X.; Kanamori, K.; Nakanishi, K. Superhydrophobic highly flexible doubly cross-linked aerogel/carbon nanotube composites as strain/pressure sensors. J. Mater. Chem. B 2020, 8, 4883–4889. [Google Scholar] [CrossRef] [PubMed]
- Su, X.J.; Li, H.Q.; Lai, X.J.; Chen, Z.H.; Zeng, X.R. Highly stretchable and conductive superhydrophobic coating for flexible electronics. ACS Appl. Mater. Interfaces 2018, 10, 10587–10597. [Google Scholar] [CrossRef] [PubMed]
- Preety, A.; Shingo, A.; Sanjeev, K.U.; Radovan, K.; Fernando, V.B.; Ryusuke, F.; Takuya, H.; Mutsumi, K.; David, T.; Katsumi, K.A. Water-resilient carbon nanotube based strain sensor for monitoring structural integrity. J. Mater. Chem. A 2019, 7, 19996–20005. [Google Scholar]
- Sahoo, B.N.; Woo, J.; Algadi, H.; Lee, J.; Lee, T. Superhydrophobic, transparent, and stretchable 3D hierarchical wrinkled film-based sensors for wearable applications. Adv. Mater. Technol. 2019, 4, 1900230. [Google Scholar] [CrossRef]
- Lin, L.W.; Wang, L.; Li, B.; Luo, J.C.; Huang, X.W.; Gao, Q.; Xue, H.G.; Gao, J.F. Dual conductive network enabled superhydrophobic and high performance strain sensors with outstanding electro-thermal performance and extremely high gauge factors. Chem. Eng. J. 2020, 385, 123391. [Google Scholar] [CrossRef]
- Wang, L.; Luo, J.; Chen, Y.; Lin, L.; Huang, X.; Xue, H.; Xue, H.G.; Gao, J.F. Fluorine-free superhydrophobic and conductive rubber composite with outstanding deicing performance for highly sensitive and stretchable strain sensors. ACS Appl. Mater. Interfaces 2019, 11, 17774–17783. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, X.; Xin, J.H. Can superhydrophobic surfaces repel hot water. J. Mater. Chem. 2009, 19, 5602–5611. [Google Scholar] [CrossRef]
- Yong, J.; Chen, F.; Yang, Q.; Huo, J.L.; Hou, X. Superoleophobic surfaces. Chem. Soc. Rev. 2017, 46, 4168–4217. [Google Scholar] [CrossRef] [Green Version]
- Kim, A.; Kim, S.; Huh, M.; Kim, H.; Chan, L. Superior anti-icing strategy by combined sustainable liquid repellence and electro/photo-responsive thermogenesis of oil/MWNT composite. J. Mater. Sci. Technol. 2020, 49, 106–116. [Google Scholar] [CrossRef]
- Xiao, R.; Miljkovic, N.; Enright, R.; Wang, E.N. Immersion condensation on oil-infused heterogeneous surfaces for enhanced heat transfer. Sci. Rep. 2013, 3, 1988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yeong, Y.H.; Wang, C.; Wynne, K.J.; Gupta, M.C. Oil-infused superhydrophobic silicone material for low ice adhesion with long term infusion stability. ACS Appl. Mater. Interfaces 2016, 8, 32050–32059. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Yang, Y.; Huang, M.; Zhou, Y.X.; Liu, Y.Y.; Liang, X.D. Durability of a lubricant-infused electrospray silicon rubber surface as an anti-icing coating. Appl. Surf. Sci. 2015, 346, 68–76. [Google Scholar] [CrossRef]
- Zhang, J.; Gu, C.; Tu, J.P. Robust slippery coating with superior corrosion resistance and anti-icing performance for AZ31B Mg alloy protection. ACS Appl. Mater. Interfaces 2017, 9, 11247–11257. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Zhang, D.; Lu, Z.; Sun, S. Fabrication of slippery lubricant-infused porous surface for inhibition of microbially influenced corrosion. ACS Appl. Mater. Interfaces 2015, 8, 1120–1127. [Google Scholar] [CrossRef]
- Xiao, L.; Li, J.; Mieszkin, S.; Fino, A.D.; Levkin, P.A. Slippery liquid-infused porous surfaces showing marine antibiofouling properties. ACS Appl. Mater. Interfaces 2013, 5, 10074–10080. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Wang, D.R.; Zha, J.W.; Zhao, J.; Dang, Z.M. Increased electro action through a molecular flexibility tuning process in TiO2-polydimethylsilicone nanocomposites. J. Mater. Chem. A 2013, 1, 3140–3145. [Google Scholar] [CrossRef]
- Kreder, M.J.; Alvarenga, J.; Kim, P.; Aizenberg, J. Design of anti-icing surfaces: Smooth, textured or slippery. Nat. Rev. Mater. 2016, 1, 15003. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Yang, C.; Zhang, S.; Wang, Y.; Zou, R.; Lee, A.; Deng, Q.; Hu, N. Multifunctional Slippery Polydimethylsiloxane/Carbon Nanotube Composite Strain Sensor with Excellent Liquid Repellence and Anti-Icing/Deicing Performance. Polymers 2022, 14, 409. https://doi.org/10.3390/polym14030409
Liu K, Yang C, Zhang S, Wang Y, Zou R, Lee A, Deng Q, Hu N. Multifunctional Slippery Polydimethylsiloxane/Carbon Nanotube Composite Strain Sensor with Excellent Liquid Repellence and Anti-Icing/Deicing Performance. Polymers. 2022; 14(3):409. https://doi.org/10.3390/polym14030409
Chicago/Turabian StyleLiu, Ke, Chao Yang, Siyuan Zhang, Yao Wang, Rui Zou, Alamusi Lee, Qibo Deng, and Ning Hu. 2022. "Multifunctional Slippery Polydimethylsiloxane/Carbon Nanotube Composite Strain Sensor with Excellent Liquid Repellence and Anti-Icing/Deicing Performance" Polymers 14, no. 3: 409. https://doi.org/10.3390/polym14030409