
Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Single WLC with a Magnetic Bead at the Stiffness (Weakly Bending) Limit
2.1. The Positional–Orientational Propagator of a WLC at the Stiff Limit
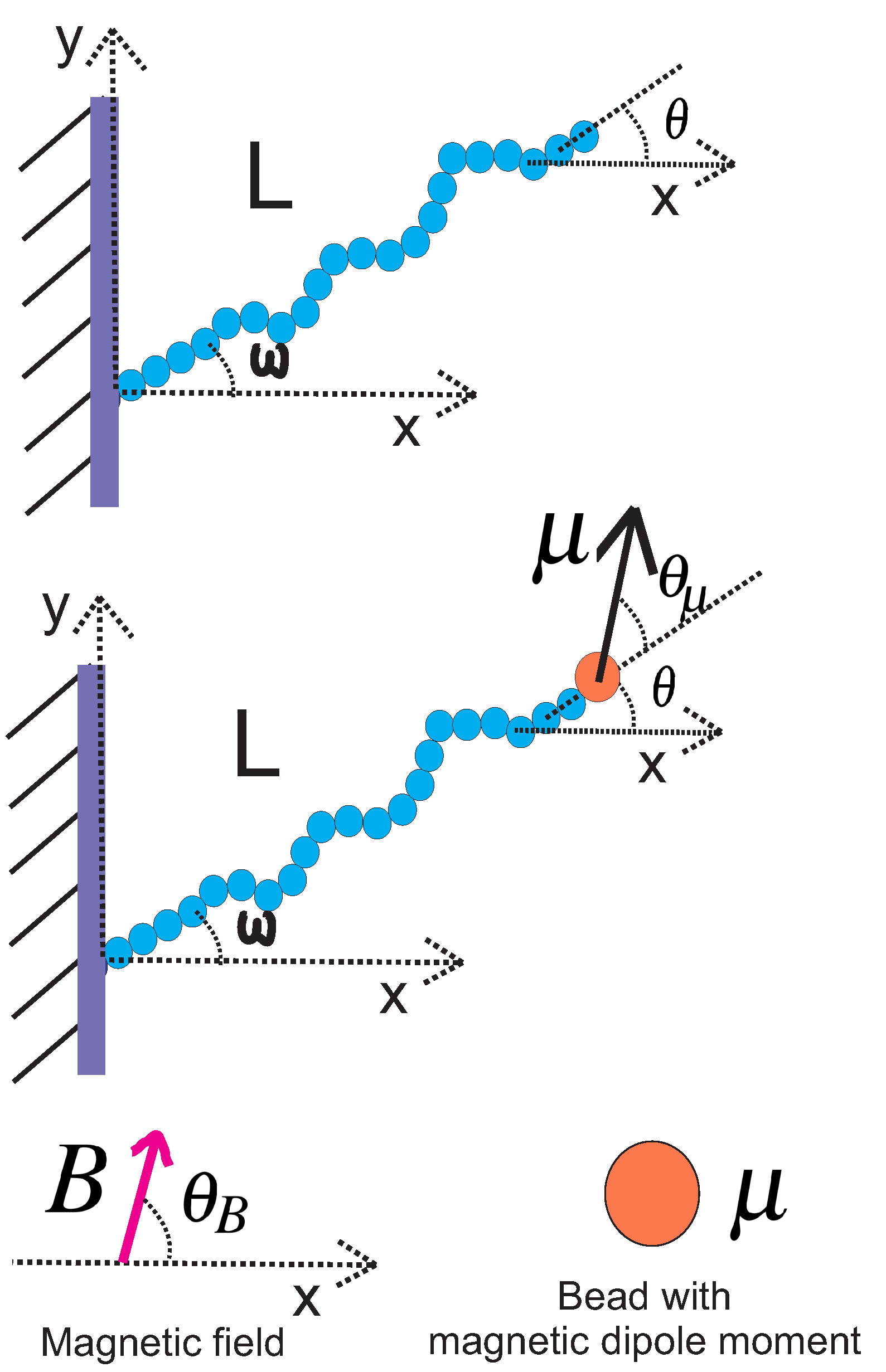
2.2. Grafted Stiff WLC with One End Attached to a Magnetic Bead
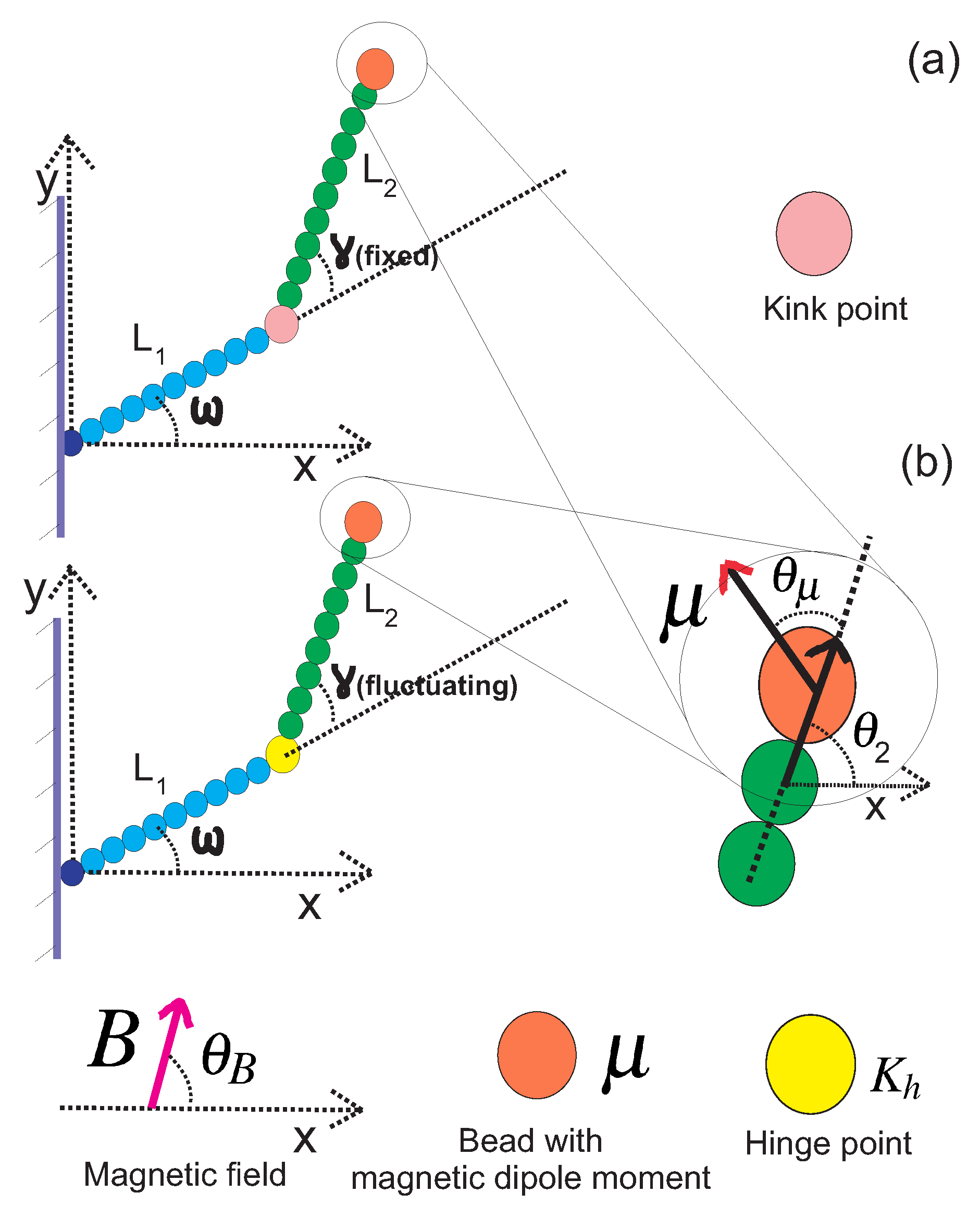
3. Two Weakly Bending WLCs Jointed at a Stiff Kink Point with One End Attached to a Magnetic Bead
4. Two Weakly Bending WLCs Jointed at a Hinge Point (Semiflexible Nunchuck) with One End Attached to a Magnetic Bead
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. The Single Filament
Appendix A.2. The Two Filaments Jointed at a Stiff Kink Point
References
- Cai, X.; Arias, D.S.; Velazquez, L.R.; Vexler, S.; Bevier, A.L.; Fygenson, D.K. DNA Nunchucks: Nanoinstrumentation for Single-Molecule Measurement of Stiffness and Bending. Nano Lett. 2020, 20, 1388–1395. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, A.M.; Velazquez, L.; Chisenhall, A.; Schiffels, D.; Fygenson, D.K.; Schulman, R. Self-assembly of precisely defined DNA nanotube superstructures using DNA origami seeds. Nanoscale 2017, 9, 522–526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benetatos, P.; Razbin, M. Orientational Fluctuations and Bimodality in Semiflexible Nunchucks. Polymers 2021, 13, 2031. [Google Scholar] [CrossRef] [PubMed]
- Lattanzi, G.; Munk, T.; Frey, E. Transverse fluctuations of grafted polymers. Phys. Rev. E 2004, 69, 021801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benetatos, P.; Munk, T.; Frey, E. Bimodality in the transverse fluctuations of a grafted semiflexible polymer and the diffusion-convection analogue: An effective-medium approach. Phys. Rev. E 2005, 72, 030801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chaudhuri, D. Semiflexible polymers: Dependence on ensemble and boundary orientations. Phys. Rev. E 2007, 75, 021803. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Semeriyanov, F.F.; Stepanow, S. Bimodal distribution function of a three-dimensional wormlike chain with a fixed orientation of one end. Phys. Rev. E 2007, 75, 061801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Körner, J.; Reiche, C.F.; Gemming, T.; Büchner, B.; Gerlach, G.; Mühl, T. Signal enhancement in cantilever magnetometry based on a co-resonantly coupled sensor. Beilstein J. Nanotechnol. 2016, 7, 1033–1043. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gosse, C.; Croquette, V. Magnetic tweezers: Micromanipulation and force measurement at the molecular level. Biophys. J. 2002, 82, 3314–3329. [Google Scholar] [CrossRef] [Green Version]
- Seol, Y.; Neuman, K.C. Magnetic Tweezers for Single-Molecule Manipulation; Humana Press: Totowa, NJ, USA, 2011; pp. 265–293. [Google Scholar]
- Saleh, O.A.; McIntosh, D.B.; Pincus, P.; Ribeck, N. Nonlinear Low-Force Elasticity of Single-Stranded DNA Molecules. Phys. Rev. Lett. 2009, 102, 068301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarkar, R.; Rybenkov, V.V. A Guide to Magnetic Tweezers and Their Applications. Front. Phys. 2016, 4, 48. [Google Scholar] [CrossRef]
- Aermes, C.; Hayn, A.; Fischer, T.; Mierke, C.T. Environmentally controlled magnetic nano-tweezer for living cells and extracellular matrices. Sci. Rep. 2020, 10, 13453. [Google Scholar] [CrossRef] [PubMed]
- Gertz, F.; Khitun, A. Biological cell manipulation by magnetic nanoparticles. AIP Adv. 2016, 6, 025308. [Google Scholar] [CrossRef] [Green Version]
- Razbin, M.; Falcke, M.; Benetatos, P.; Zippelius, A. Mechanical properties of branched actin filaments. Phys. Biol. 2015, 12, 046007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benetatos, P.; Frey, E. Depinning of semiflexible polymers. Phys. Rev. E 2003, 67, 051108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Razbin, M.; Mashaghi, A. Elasticity of connected semiflexible quadrilaterals. Soft Matter 2021, 17, 102–112. [Google Scholar] [CrossRef] [PubMed]
- Razbin, M. Elasticity of a Filament with Kinks. J. Stat. Phys. 2018, 170, 642–651. [Google Scholar] [CrossRef]
- Razbin, M.; Benetatos, P.; Zippelius, A. Elasticity of a semiflexible filament with a discontinuous tension due to a cross-link or a molecular motor. Phys. Rev. E 2016, 93, 052408. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murzin, D.; Mapps, D.J.; Levada, K.; Belyaev, V.; Omelyanchik, A.; Panina, L.; Rodionova, V. Ultrasensitive Magnetic Field Sensors for Biomedical Applications. Sensors 2020, 20, 1569. [Google Scholar] [CrossRef] [PubMed] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razbin, M.; Benetatos, P. Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End. Polymers 2022, 14, 695. https://doi.org/10.3390/polym14040695
Razbin M, Benetatos P. Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End. Polymers. 2022; 14(4):695. https://doi.org/10.3390/polym14040695
Chicago/Turabian StyleRazbin, Mohammadhosein, and Panayotis Benetatos. 2022. "Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End" Polymers 14, no. 4: 695. https://doi.org/10.3390/polym14040695
APA StyleRazbin, M., & Benetatos, P. (2022). Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End. Polymers, 14(4), 695. https://doi.org/10.3390/polym14040695