
Elasticity of Semiflexible ZigZag Nanosprings with a Point Magnetic Moment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Single-Grafted Weakly Bending Filament
3. Grafted Filament with Regular Kinks at the Gaussian Limit
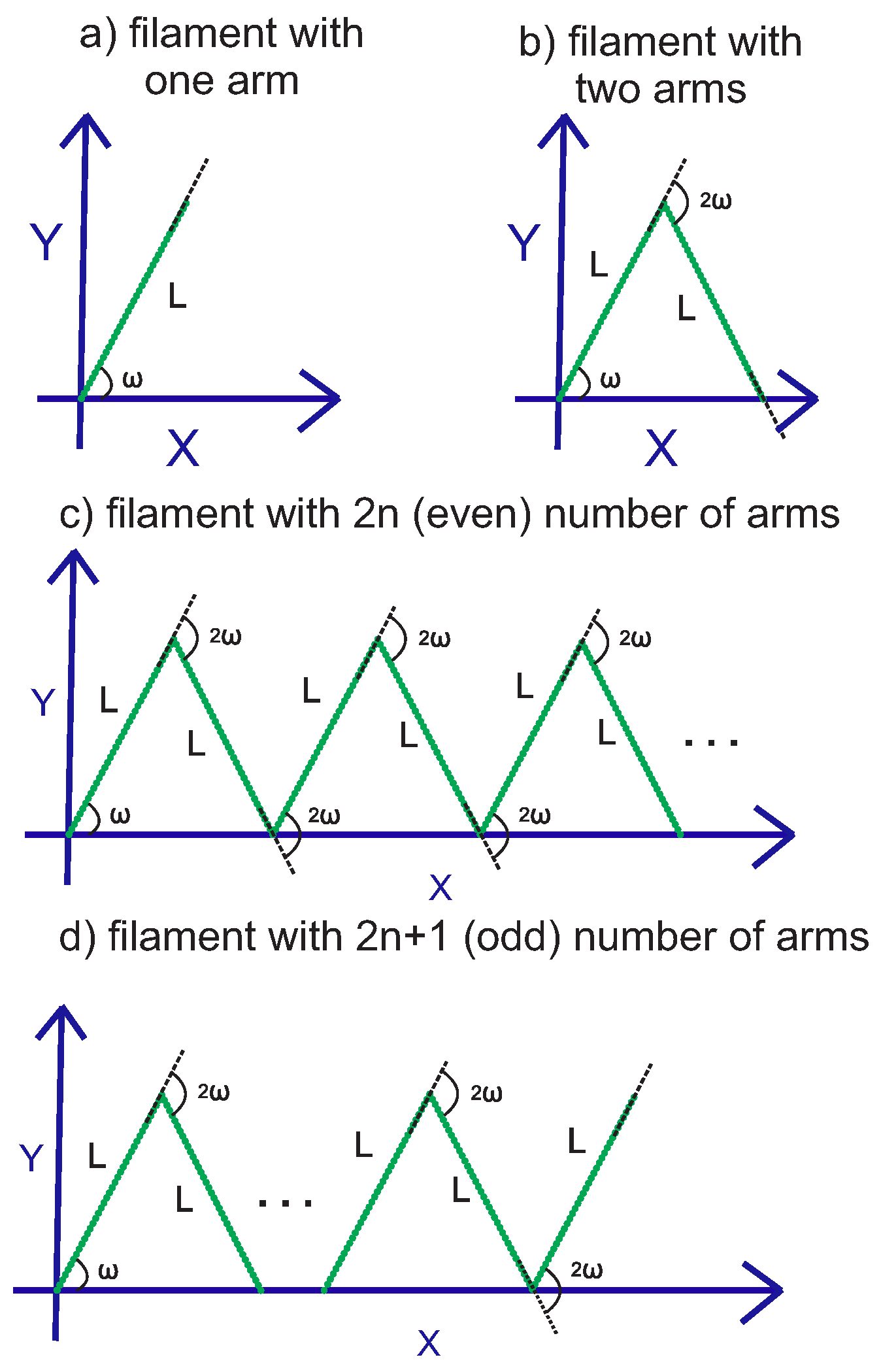
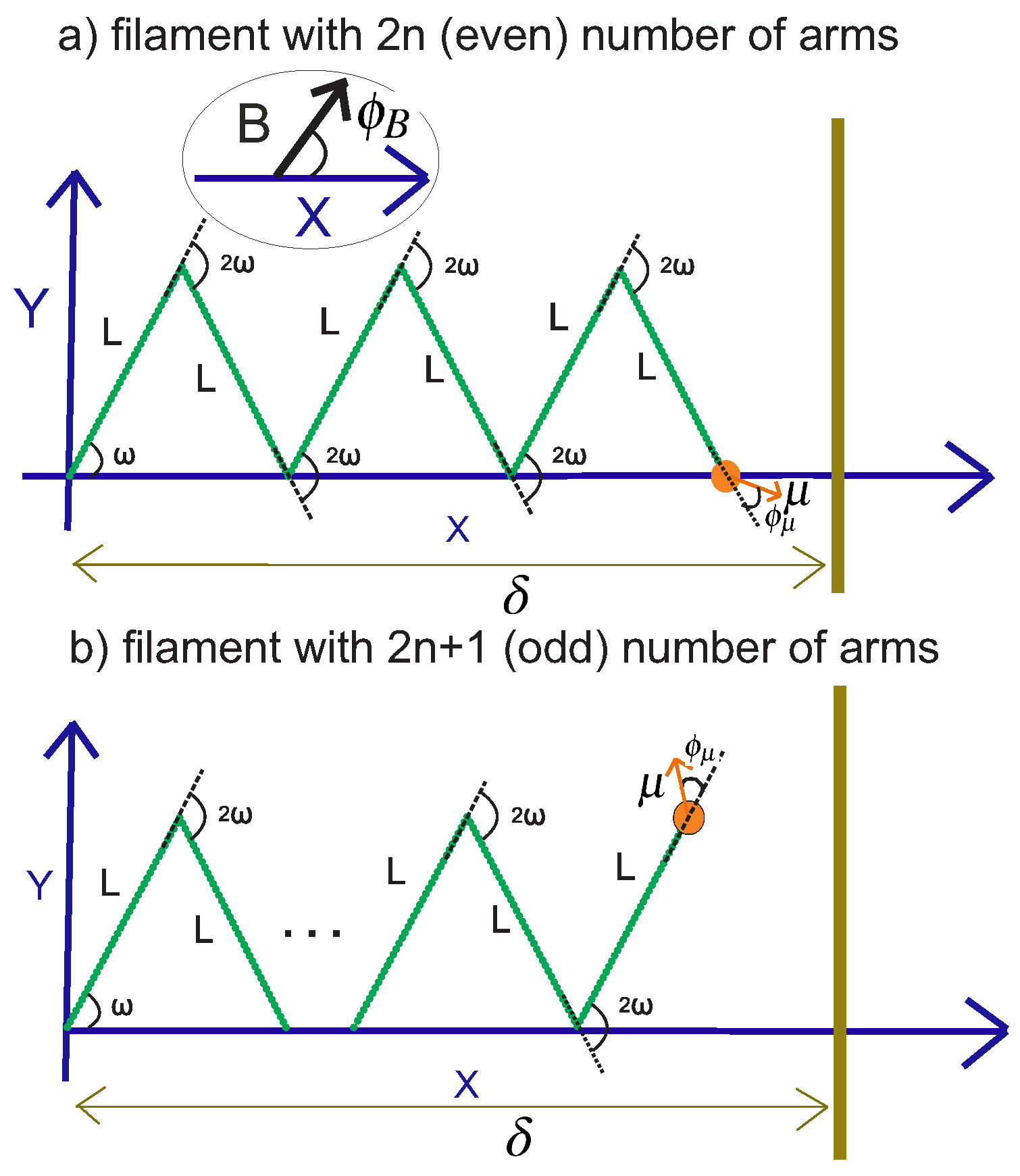
3.1. Filament with an Even Number of Arms
3.2. Filament with an Odd Number of Arms
4. Grafted Weakly Bending Filament with Regular Kinks, with One End Attached to a Magnetic Bead
4.1. Filament with an Even Number of Arms
4.2. Filament with an Odd Number of Arms
5. Force-Extension Relation in the Longitudinal and Transverse Direction
5.1. Filament with an Even Number of Arms
5.2. Filament with an Odd Number of Arms
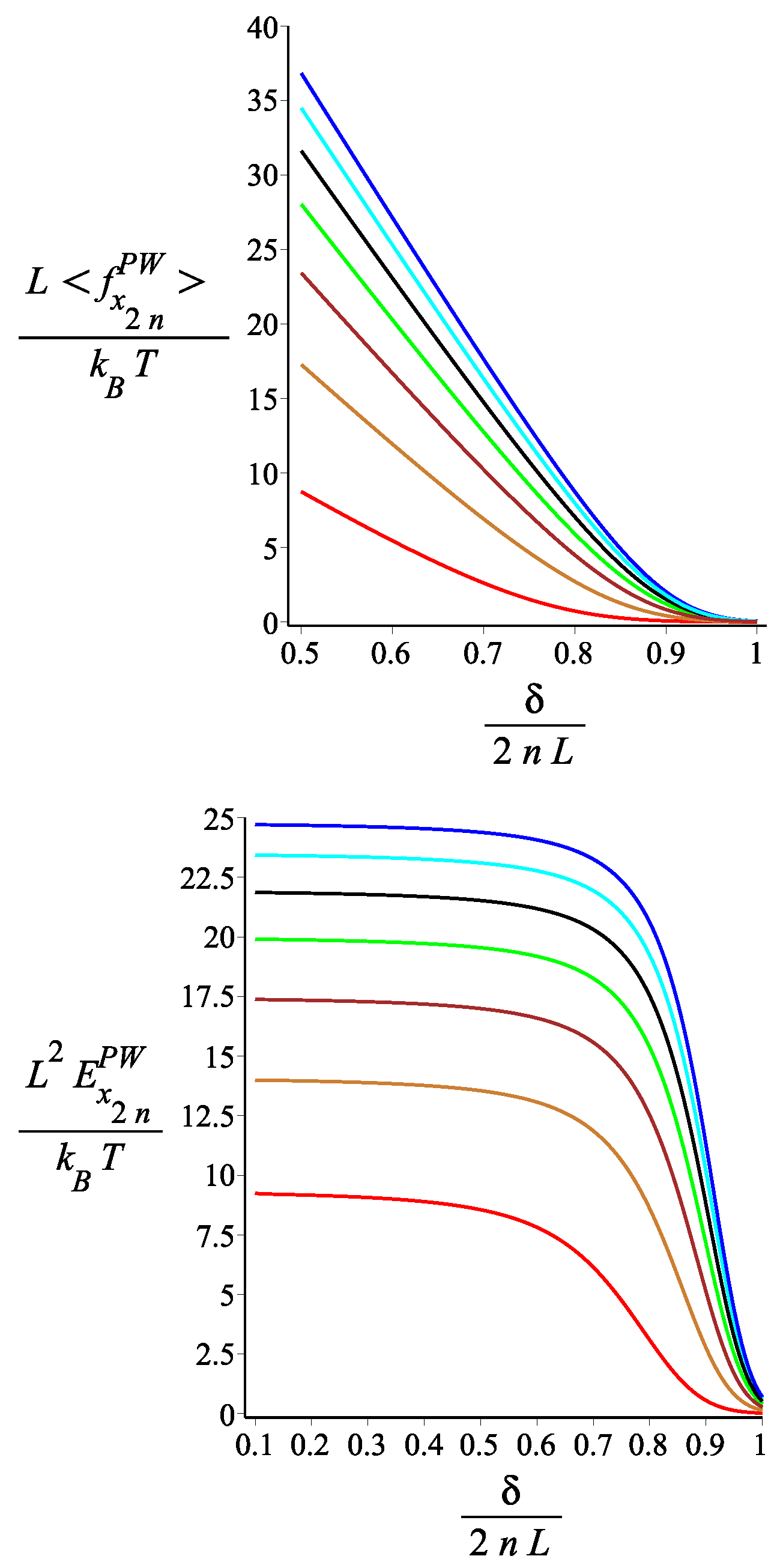
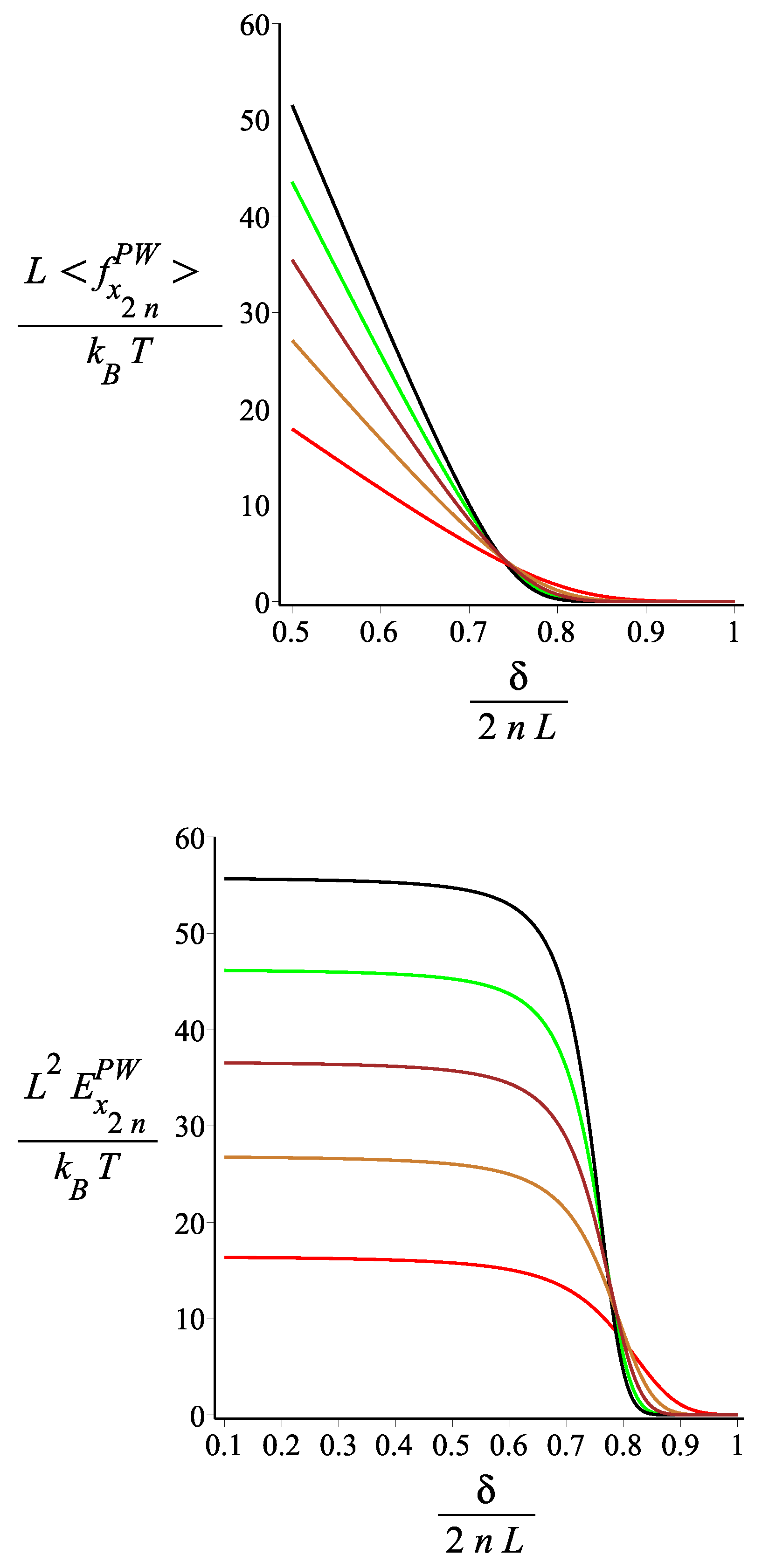
6. Force Exerted on a Stiff Planar Wall by the Tip of the Kinked Filament
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yamakawa, H. Modern Theory of Polymer Solutions; Harper’s Chemistry Series; Harper and Row: New York, NY, USA, 1971. [Google Scholar]
- Schiessel, H. Biophysics for Beginners: A Journey through the Cell Nucleus; Jenny Stanford Publishing: New Delhi, India, 2021. [Google Scholar]
- Howard, J. Mechanics of Motor Proteins and the Cytoskeleton; Sinauer: Sunderland, MA, USA, 2005. [Google Scholar]
- Mansfield, M.L.; Douglas, J.F. Transport Properties of Wormlike Chains with Applications to Double Helical DNA and Carbon Nanotubes. Macromolecules 2008, 41, 5412–5421. [Google Scholar] [CrossRef]
- Yakobson, B.I.; Couchman, L.S. Persistence Length and Nanomechanics of Random Bundles of Nanotubes. J. Nanopart. Res. 2006, 8, 105–110. [Google Scholar] [CrossRef]
- Fakhri, N.; Tsyboulski, D.A.; Cognet, L.; Weisman, R.B.; Pasquali, M. Diameter-dependent bending dynamics of single-walled carbon nanotubes in liquids. Proc. Natl. Acad. Sci. USA 2009, 106, 14219–14223. [Google Scholar] [CrossRef] [Green Version]
- Rothemund, P.W.K.; Ekani-Nkodo, A.; Papadakis, N.; Kumar, A.; Fygenson, D.K.; Winfree, E. Design and Characterization of Programmable DNA Nanotubes. J. Am. Chem. Soc. 2004, 126, 16344–16352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schiffels, D.; Liedl, T.; Fygenson, D.K. Nanoscale Structure and Microscale Stiffness of DNA Nanotubes. ACS Nano 2013, 7, 6700–6710. [Google Scholar] [CrossRef] [PubMed]
- Gerbal, F.; Wang, Y. Optical detection of nanometric thermal fluctuations to measure the stiffness of rigid superparamagnetic microrods. Proc. Natl. Acad. Sci. USA 2017, 114, 2456–2461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, N.K.; Park, J.S.; Johner, A.; Obukhov, S.; Hyon, J.Y.; Lee, K.J.; Hong, S.C. Elasticity of Cisplatin-Bound DNA Reveals the Degree of Cisplatin Binding. Phys. Rev. Lett. 2008, 101, 248101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schiessel, H. The physics of chromatin. J. Phys. Condens. Matter 2003, 15, R699. [Google Scholar] [CrossRef]
- Kurian, J.V. A new polymer platform for the future—Sorona® from corn derived 1, 3-propanediol. J. Polym. Environ. 2005, 13, 159–167. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, J.; Ding, F. The Great Reduction of a Carbon nanotube’s Mechanical Performance by a Few Topological Defects. ACS Nano 2016, 10, 6410–6415. [Google Scholar] [CrossRef]
- Wang, S.F.; Zhang, H.L.; Wu, X.Z. A dislocation model for the pentagon-heptagon pair in zigzag single-walled carbon nanotubes. Europhys. Lett. 2010, 90, 56004. [Google Scholar] [CrossRef]
- Iijima, S.; Brabec, C.; Maiti, A.; Bernholc, J. Structural flexibility of carbon nanotubes. J. Chem. Phys. 1996, 104, 2089–2092. [Google Scholar] [CrossRef]
- Cohen, A.E.; Mahadevan, L. Kinks, rings, and rackets in filamentous structures. Proc. Natl. Acad. Sci. USA 2003, 100, 12141–12146. [Google Scholar] [CrossRef] [Green Version]
- Seeman, N.C. Structural DNA Nanotechnology; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Winfree, E.; Liu, F.; Wenzler, L.A.; Seeman, N.C. Design and self-assembly of two-dimensional DNA crystals. Nature 1998, 394, 539–544. [Google Scholar] [CrossRef] [PubMed]
- Douglas, S.M.; Dietz, H.; Liedl, T.; Högberg, B.; Graf, F.; Shih, W.M. Self-assembly of DNA into nanoscale three-dimensional shapes. Nature 2009, 459, 414–418. [Google Scholar] [CrossRef]
- Dietz, H.; Douglas, S.M.; Shih, W.M. Folding DNA into twisted and curved nanoscale shapes. Science 2009, 325, 725–730. [Google Scholar] [CrossRef] [Green Version]
- Han, D.; Pal, S.; Nangreave, J.; Deng, Z.; Liu, Y.; Yan, H. DNA origami with complex curvatures in three-dimensional space. Science 2011, 332, 342–346. [Google Scholar] [CrossRef] [Green Version]
- Dunn, K.E.; Dannenberg, F.; Ouldridge, T.E.; Kwiatkowska, M.; Turberfield, A.J.; Bath, J. Guiding the folding pathway of DNA origami. Nature 2015, 525, 82–86. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Jiang, S.; Wu, S.; Li, Y.; Mao, C.; Liu, Y.; Yan, H. Complex wireframe DNA origami nanostructures with multi-arm junction vertices. Nat. Nanotechnol. 2015, 10, 779. [Google Scholar] [CrossRef]
- Benson, E.; Mohammed, A.; Gardell, J.; Masich, S.; Czeizler, E.; Orponen, P.; Högberg, B. DNA rendering of polyhedral meshes at the nanoscale. Nature 2015, 523, 441–444. [Google Scholar] [CrossRef]
- Veneziano, R.; Ratanalert, S.; Zhang, K.; Zhang, F.; Yan, H.; Chiu, W.; Bathe, M. Designer nanoscale DNA assemblies programmed from the top down. Science 2016, 352, 1534. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jun, H.; Zhang, F.; Shepherd, T.; Ratanalert, S.; Qi, X.; Yan, H.; Bathe, M. Autonomously designed free-form 2D DNA origami. Sci. Adv. 2019, 5, eaav0655. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seeman, N.C. DNA nanotechnology: From the pub to information-based chemistry. In DNA Nanotechnology; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–9. [Google Scholar]
- Iwaki, M.; Wickham, S.F.; Ikezaki, K.; Yanagida, T.; Shih, W.M. A programmable DNA origami nanospring that reveals force-induced adjacent binding of myosin VI heads. Nat. Commun. 2016, 7, 13715. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nick Maleki, A.; Huis in ’t Veld, P.J.; Akhmanova, A.; Dogterom, M.; Volkov, V.A. Estimation of microtubule-generated forces using a DNA origami nanospring. J. Cell Sci. 2022, 136, jcs260154. [Google Scholar] [CrossRef] [PubMed]
- Teeter, J.D.; Zahl, P.; Mehdi Pour, M.; Costa, P.S.; Enders, A.; Sinitskii, A. On-Surface Synthesis and Spectroscopic Characterization of Laterally Extended Chevron Graphene Nanoribbons. ChemPhysChem 2019, 20, 2281–2285. [Google Scholar] [CrossRef] [PubMed]
- Razbin, M. Elasticity of a Filament with Kinks. J. Stat. Phys. 2018, 170, 642–651. [Google Scholar] [CrossRef]
- Dorfmann, L.; Ogden, R.W. Nonlinear Theory of Electroelastic and Magnetoelastic Interactions; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Menzel, A.M. Mesoscopic characterization of magnetoelastic hybrid materials: Magnetic gels and elastomers, their particle-scale description, and scale-bridging links. Arch. Appl. Mech. 2018, 89, 17–45. [Google Scholar] [CrossRef]
- Biswal, S.L.; Gast, A.P. Mechanics of semiflexible chains formed by poly(ethylene glycol)-linked paramagnetic particles. Phys. Rev. E 2003, 68, 021402. [Google Scholar] [CrossRef]
- Cebers, A.; Erglis, K. Flexible Magnetic Filaments and their Applications. Adv. Funct. Mater. 2016, 26, 3783–3795. [Google Scholar] [CrossRef]
- Vázquez-Montejo, P.; Dempster, J.M.; de la Cruz, M.O. Paramagnetic filaments in a fast precessing field: Planar versus helical conformations. Phys. Rev. Mater. 2017, 1, 064402. [Google Scholar] [CrossRef]
- Sánchez, P.A.; Pyanzina, E.S.; Novak, E.V.; Cerdà, J.J.; Sintes, T.; Kantorovich, S.S. Supramolecular Magnetic Brushes: The Impact of Dipolar Interactions on the Equilibrium Structure. Macromolecules 2015, 48, 7658–7669. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sánchez, P.A.; Novak, E.V.; Pyanzina, E.S.; Kantorovich, S.S.; Cerdà, J.J.; Sintes, T. Adsorption transition of a grafted ferromagnetic filament controlled by external magnetic fields. Phys. Rev. E 2020, 102, 022609. [Google Scholar] [CrossRef]
- Sano, T.G.; Pezzulla, M.; Reis, P.M. A Kirchhoff-like theory for hard magnetic rods under geometrically nonlinear deformation in three dimensions. J. Mech. Phys. Solids 2022, 160, 104739. [Google Scholar] [CrossRef]
- Dreyfus, R.; Baudry, J.; Roper, M.L.; Fermigier, M.; Stone, H.A.; Bibette, J. Microscopic artificial swimmers. Nature 2005, 437, 862–865. [Google Scholar] [CrossRef]
- Razbin, M.; Benetatos, P. Grafted Semiflexible Nunchucks with a Magnetic Bead Attached to the Free End. Polymers 2022, 14, 695. [Google Scholar] [CrossRef]
- Singh, K.; Tipton, C.R.; Han, E.; Mullin, T. Magneto-elastic buckling of an Euler beam. Proc. R. Soc. Math. Phys. Eng. Sci. 2013, 469, 20130111. [Google Scholar] [CrossRef]
- Madenci, E. Free vibration analysis of carbon nanotube RC nanobeams with variational approaches. Adv. Nano Res. 2021, 11, 157–171. [Google Scholar]
- Vinyas, M.; Sunny, K.; Harursampath, D.; Nguyen-Thoi, T.; Loja, M. Influence of interphase on the multi-physics coupled frequency of three-phase smart magneto-electro-elastic composite plates. Compos. Struct. 2019, 226, 111254. [Google Scholar] [CrossRef]
- Changlin, Z.; Zhongxian, Z.; Ji, Z.; Yuan, F.; Vahid, T. Vibration analysis of FG porous rectangular plates reinforced by graphene platelets. Steel Compos. Struct. 2020, 34, 215–226. [Google Scholar]
- Benetatos, P.; Razbin, M. Orientational Fluctuations and Bimodality in Semiflexible Nunchucks. Polymers 2021, 13, 2031. [Google Scholar] [CrossRef]
- Razbin, M.; Falcke, M.; Benetatos, P.; Zippelius, A. Mechanical properties of branched actin filaments. Phys. Biol. 2015, 12, 046007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Razbin, M.; Mashaghi, A. Elasticity of connected semiflexible quadrilaterals. Soft Matter 2021, 17, 102–112. [Google Scholar] [CrossRef] [PubMed]
- Gompper, G.; Burkhardt, T.W. Unbinding transition of semiflexible membranes in (1+1) dimensions. Phys. Rev. A 1989, 40, 6124–6127. [Google Scholar] [CrossRef] [PubMed]
- Benetatos, P.; Frey, E. Depinning of semiflexible polymers. Phys. Rev. E 2003, 67, 051108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dutta, S.; Benetatos, P. Inequivalence of fixed-force and fixed-extension statistical ensembles for a flexible polymer tethered to a planar substrate. Soft Matter 2018, 14, 6857–6866. [Google Scholar] [CrossRef] [Green Version]
- Gholami, A.; Wilhelm, J.; Frey, E. Entropic forces generated by grafted semiflexible polymers. Phys. Rev. E 2006, 74, 041803. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razbin, M.; Benetatos, P. Elasticity of Semiflexible ZigZag Nanosprings with a Point Magnetic Moment. Polymers 2023, 15, 44. https://doi.org/10.3390/polym15010044
Razbin M, Benetatos P. Elasticity of Semiflexible ZigZag Nanosprings with a Point Magnetic Moment. Polymers. 2023; 15(1):44. https://doi.org/10.3390/polym15010044
Chicago/Turabian StyleRazbin, Mohammadhosein, and Panayotis Benetatos. 2023. "Elasticity of Semiflexible ZigZag Nanosprings with a Point Magnetic Moment" Polymers 15, no. 1: 44. https://doi.org/10.3390/polym15010044