
A Mousepad Triboelectric-Piezoelectric Hybrid Nanogenerator (TPHNG) for Self-Powered Computer User Behavior Monitoring Sensors and Biomechanical Energy Harvesting


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Preparation of the P(VDF-TrFE-CFE) Film and the PENG
2.2. Preparation of the TENG and Integration of the Hybrid Nanogenerator
2.3. Characterization and Electric Measurement
3. Results and Discussion
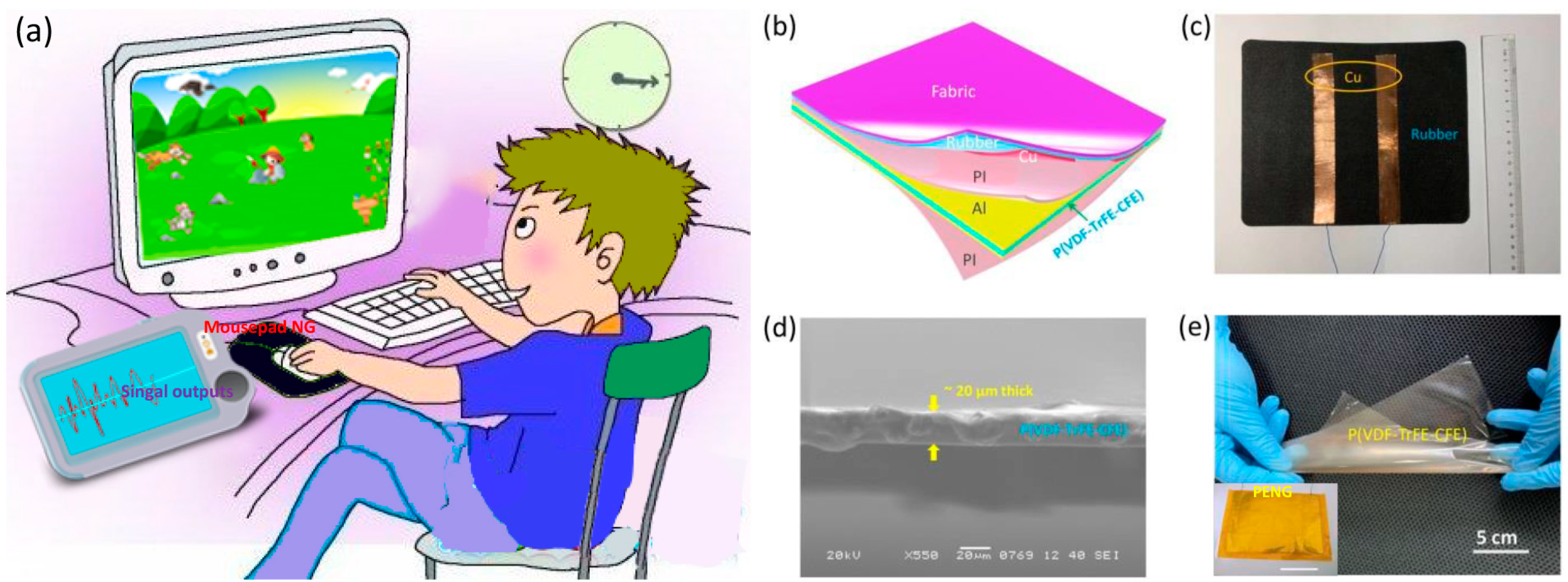
3.1. Structure, Working Principle, and Electric Outputs of Hybrid Nanogenerators
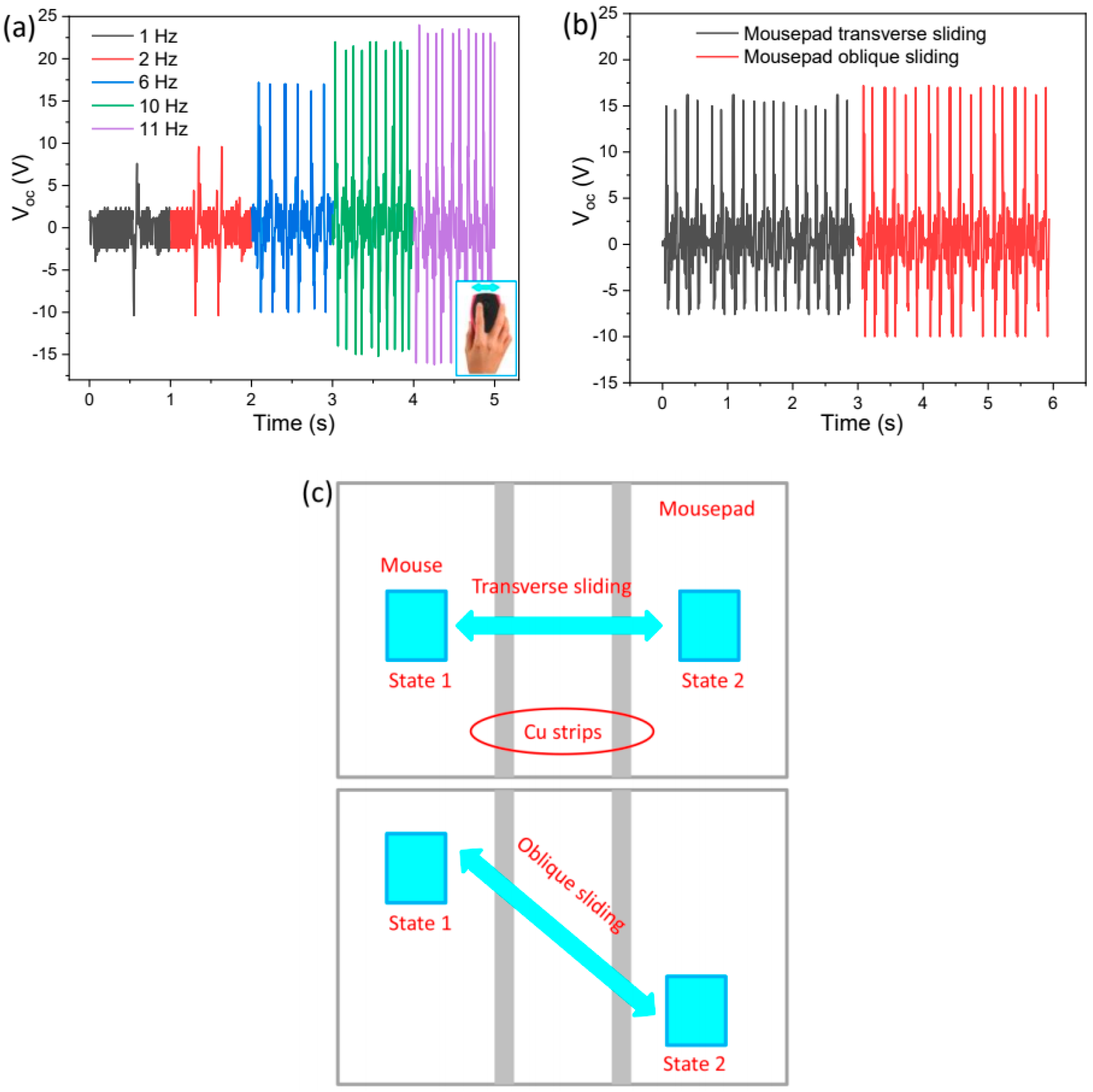
3.2. Self-Powered Mouse Sliding-Type Motion Sensing by the Hybrid Nanogenerator
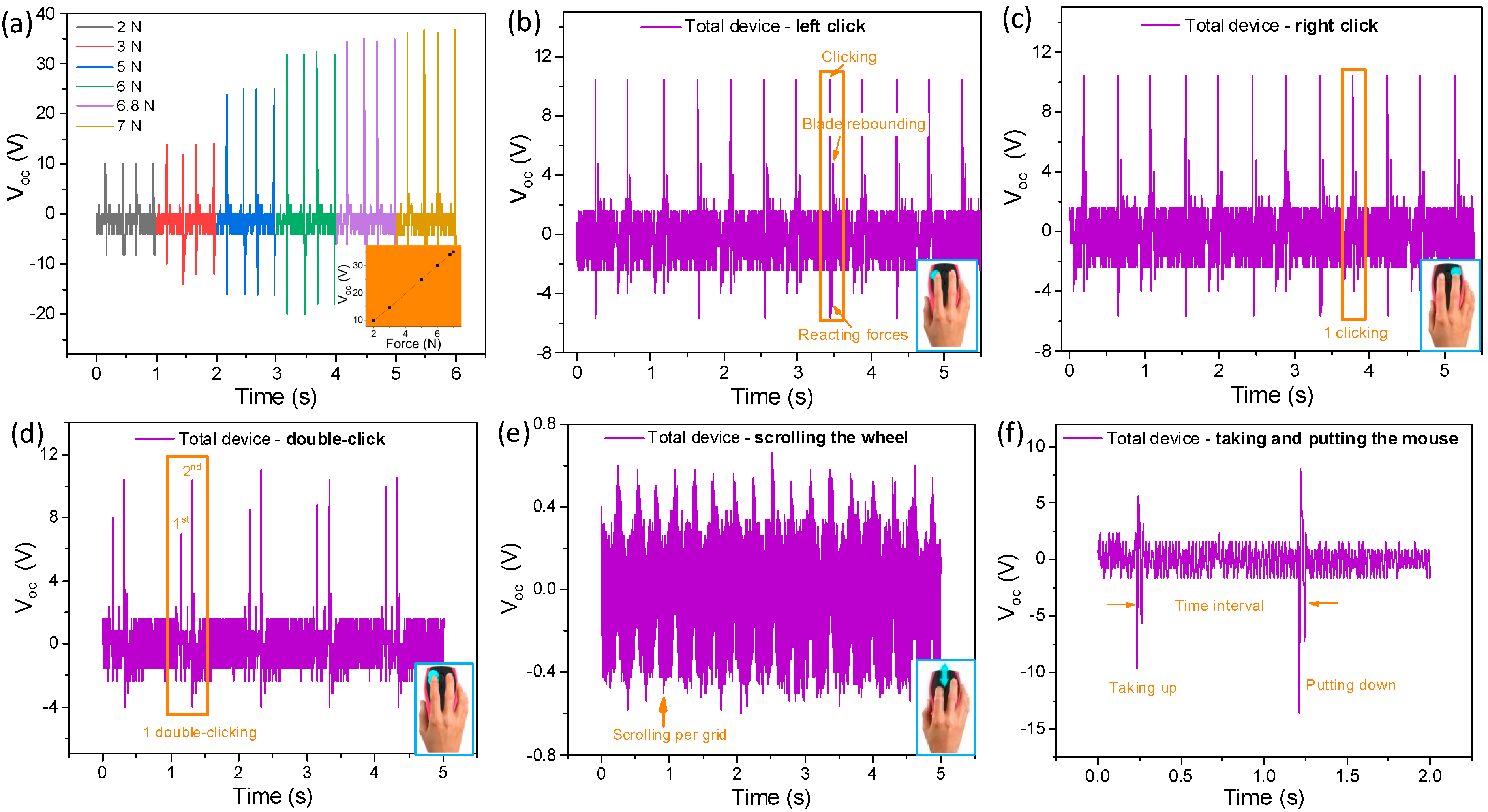
3.3. Mouse Pressing-Type Motion Sensing by the Hybrid Nanogenerator
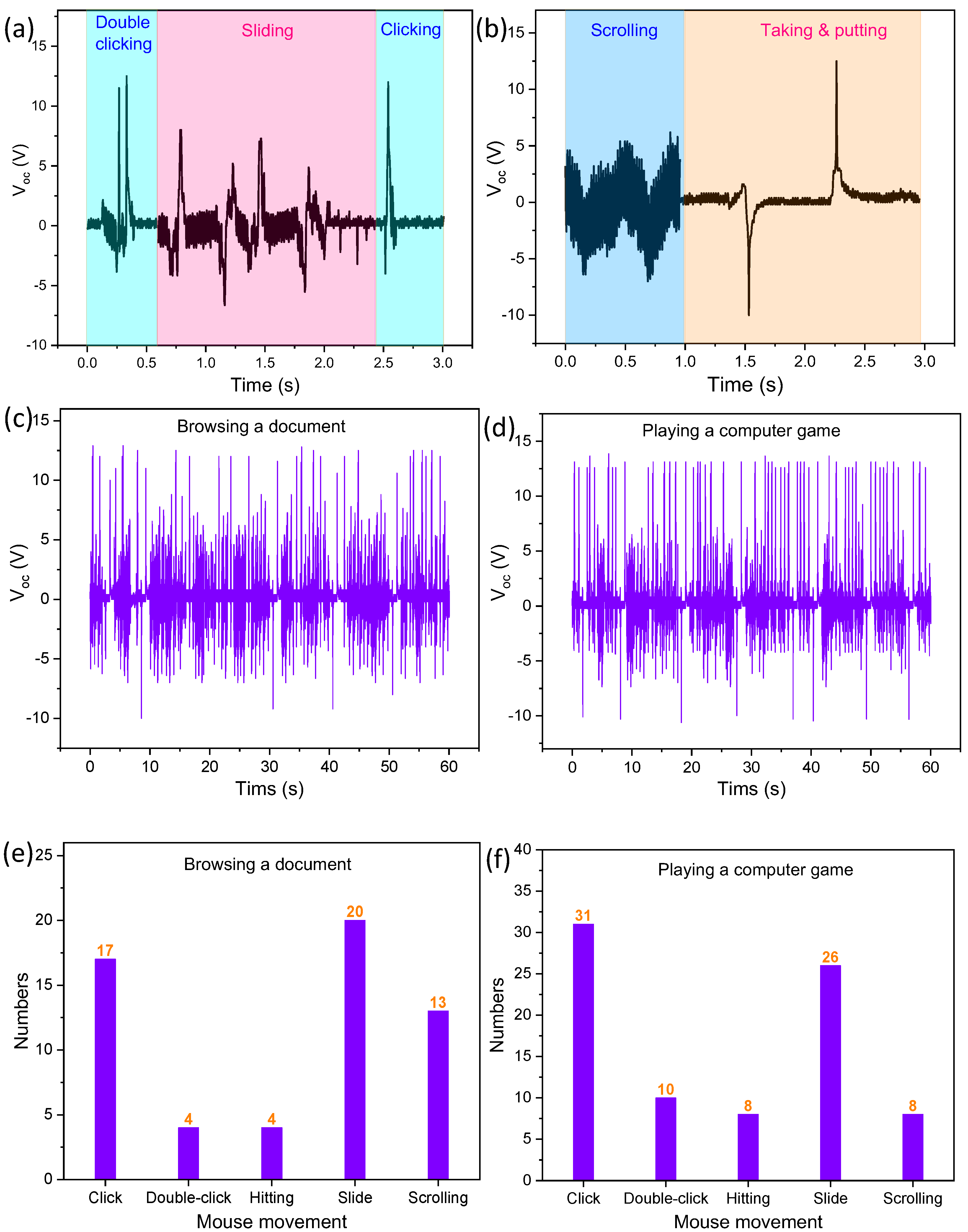
3.4. Computer User Bevavior Monitoring by the Hybrid Nanogenerator
3.5. Biomechanical Energy Harvestingand Conversion by the Hybrid Nanogenerator
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Cao, Y.; Miao, M.; Ai, L.; Sun, K.; Mi, Q.; Zang, S.Y.; Zuo, Y.; Yuan, X.G.; Wang, Q. Human motion monitoring in sports using wearable graphene-coated fiber sensors. Sensor. Actuat. A Phys. 2018, 274, 132–140. [Google Scholar] [CrossRef]
- Yeom, I.S.; Park, T.J.; Jung, C.W. Design of a broadband beam-forming antenna for emergence detection and rescue application. Microw. Opt. Techn. Lett. 2018, 60, 2651–2656. [Google Scholar] [CrossRef]
- Yi, F.; Zhang, Z.; Kang, Z.; Liao, Q.; Zhang, Y. Recent advances in triboelectric nanogenerators-based health monitoring. Adv. Funct. Mater. 2019, 29, 1808849. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, G.; Jin, T.; Zhou, Z. Adaptive through-wall indication of human target with different motions. IEEE Geosci. Remote Sens. 2014, 11, 911–915. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.L.; Wu, D.H.; Zhu, H.W. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666. [Google Scholar] [CrossRef]
- Duan, Z.; Liang, J. Non-contact detection of vital signs using a UWB radar sensor. IEEE Access 2019, 7, 36888–36895. [Google Scholar] [CrossRef]
- Gao, P.X.; Song, J.; Liu, J.; Wang, Z.L. Nanowire piezoelectric nanogenerators on plastic substrates as flexible power sources for nanodevices. Adv. Mater. 2007, 19, 67–72. [Google Scholar] [CrossRef]
- Wang, Z.L. From contact electrification to triboelectric nanogerators. Rep. Prog. Phys. 2021, 84, 096502. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator! Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Guo, H.; Pu, X.; Chen, J.; Meng, Y.; Yeh, M.H.; Liu, G.; Tang, Q.; Chen, B.; Liu, D.; Qi, S.; et al. A highly sensitive, self-powered triboelectric auditory sensor for social robotics and hearing aids. Sci. Robot. 2018, 3, eaat2516. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Wang, F.; Tian, J.; Li, S.; Fu, E.; Nie, J.; Lei, R.; Ding, Y.; Chen, X.; Wang, Z.L. Self-powered electro-tactile system for virtual tactile experiences. Sci. Adv. 2017, 7, eabe2943. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Shen, M.; Cui, X.; Shao, Y.; Li, L.; Zhang, Y. Triboelectric nanogenerator based self-powered sensor for artificial intelligence. Nano Energy 2021, 84, 105887. [Google Scholar] [CrossRef]
- Wang, Z.; Wan, D.; Fang, R.; Yuan, Z.; Zhuo, K.; Wang, T.; Zhang, H. Water-based triboelectric nanogenerator for wireless energy transmission and self-powered communication via a solid-liquid-solid interaction. Appl. Surf. Sci. 2022, 605, 154765. [Google Scholar] [CrossRef]
- Huang, L.; Han, J.; Chen, S.; Sun, Z.; Dai, X.; Ge, P.; Zhao, C.; Zheng, Q.; Sun, F.; Hao, J. 4D-printed self-recovered triboelectric nanogenerator for energy harvesting and self-powered sensor. Nano Energy 2021, 84, 105873. [Google Scholar] [CrossRef]
- Chen, Y.; Kuang, Y.; Shi, D.; Hou, M.; Chen, X.; Jiang, L.; Gao, J.; Zhang, L.; He, Y.; Wong, C.P. A triboelectric nanogenerator design for harvesting environmental mechanical energy from water mist. Nano Energy 2020, 73, 104765. [Google Scholar] [CrossRef]
- Jian, G.; Meng, Q.; Yang, N.; Feng, L.; Wang, F.; Chen, Y.; Wong, C.P. Superhigh charge density and direct-current output in triboelectric nanogenerators via peak shifting modified charging pumping. Nano Energy 2022, 102, 107637. [Google Scholar] [CrossRef]
- Bu, C.; Li, F.; Yin, K.; Pang, J.; Wang, L.; Wang, K. Research progress and prospect of triboelectric nanogenerators as self-powered human body sensor. ACS Appl. Electron. Mater. 2020, 2, 863–878. [Google Scholar] [CrossRef]
- Wang, S.; Tai, H.; Liu, B.; Duan, Z.; Yuan, Z.; Pan, H.; Su, Y.; Xie, G.; Du, X.; Jiang, Y. A facile respiration-driven triboelectric nanogenerator for multifunctional respiratory monitoring. Nano Energy 2010, 58, 312–321. [Google Scholar] [CrossRef]
- Liu, Z.; Li, H.; Shi, B.; Fan, Y.; Wang, Z.L.; Li, Z. Wearable and implantable triboelectric nanogenerators. Adv. Funct. Mater. 2019, 29, 1808820. [Google Scholar] [CrossRef]
- Su, Y.; Chen, G.; Chen, C.; Gong, Q.; Xie, G.; Yao, M.; Tai, H.; Jiang, Y.; Chen, J. Self-powered respiration monitoring enabled by a triboelectric nanogenerator. Adv. Mater. 2021, 33, 2101262. [Google Scholar] [CrossRef]
- Ren, L. A triboelectric nanogenerator based on foam for human motion posture monitoring. Mater. Technol. 2021, 37, 1–6. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, H.; Zhao, X.; Yang, H.; Zheng, L.; Wang, W.; Sun, C. Triboelectric nanogenerator based self-powered sensor with a turnable sector structure for monitoring dirving behavior. Nano Energy 2021, 89, 106352. [Google Scholar] [CrossRef]
- Meng, X.; Cheng, Q.; Jiang, X.; Fang, Z.; Chen, X.; Li, S.; Li, C.; Sun, C.; Wang, W.; Wang, Z.L. Triboelectric nanogenerator as a highly sensitive self-powered sensor for driver behavior monitoring. Nano Energy 2018, 51, 721–727. [Google Scholar] [CrossRef]
- Xi, Y.; Hua, J.; Shi, Y. Noncontact triboelectric nanogenerator for human motion monitoring and energy harvesting. Nano Energy 2020, 69, 104390. [Google Scholar] [CrossRef]
- Ma, Y.; Ouyang, J.; Raza, T.; Li, P.; Jian, A.; Li, Z.; Liu, H.; Chen, M.; Zhang, X.; Qu, L.; et al. Flexible all-textile dual tactile-tension sensors for monitoring athletic motion during taekwondo. Nano Energy 2021, 85, 105941. [Google Scholar] [CrossRef]
- Sun, C.; Shi, Q.; Hasan, D.; Yazici, M.S.; Zhu, M.; Ma, Y.; Dong, B.; Liu, Y.; Lee, C. Self-powered multifunctional monitoring system using hybrid integrated triboelectric nanogenerators and piezoelectric microsensors. Nano Energy 2019, 58, 612–623. [Google Scholar] [CrossRef]
- Zi, Y.; Lin, L.; Wang, J.; Wang, S.; Chen, J.; Fan, X.; Yang, P.K.; Yi, F.; Wang, Z.L. Triboelectric-pyroelectric-piezoelectric hybrid cell for high-efficiency energy-havesting and self-powered sensing. Adv. Mater. 2015, 27, 2340–2347. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, N.; Liu, J.; Wen, Z.; Sun, X.; Lee, S.T.; Sun, B. Integrating silicon solar cell with triboelectric nanogenerator via a mutual electrode for harvesting energy from sunlight and raindrop. ACS Nano 2018, 12, 2893–2899. [Google Scholar] [CrossRef]
- Hansen, B.J.; Liu, Y.; Yang, R.; Wang, Z.L. Hybrid nanogenerator for concurrently harvesting biomechanical and biochemical energy. ACS Nano 2010, 4, 3647–3652. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology and self-powered sensors-principles, problems and perspectives. Faraday Discuss. 2014, 176, 447. [Google Scholar] [CrossRef]
- Jian, G.; Jiao, Y.; Meng, Q.; Guo, Y.; Wang, F.; Zhang, J.; Wang, C.; Moon, K.S.; Wong, C.P. Excellent high-temperature piezoelectric energy harvesting properties in flexible polyimide/3D PbTiO3 flower composites. Nano Energy 2021, 82, 105778. [Google Scholar] [CrossRef]
- Sekhavat, Y.A. Behavior trees for computer games. Int. J. Artif. Intell. T. 2017, 26, 1730001. [Google Scholar] [CrossRef]
- White, G.; Ekin, T.; Visinescu, L. Analysis of protective behavior and security incidents form home computers. J. Comput. Inform. Syst. 2017, 57, 353–363. [Google Scholar]
- White, G.L. Education and prevention relationships on security incidents for home computers. J. Comput. Inform. Syst. 2015, 55, 29–37. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Enviorn. Sci. 2015, 8, 2250. [Google Scholar] [CrossRef]
- Fu, J.; Hou, Y.; Gao, X.; Zheng, M.; Zhu, M. Highly durable piezoelectric energy harvester based on a PVDF-TRFE-CFE flexible nanocomposite filled with oriented BaTi2O5 nanorods with high power density. Nano Energy 2018, 52, 391–401. [Google Scholar] [CrossRef]
- Hafner, J.; Teuschel, M.; Disnan, D.; Schneider, M.; Schmid, U. Large bias-induced piezoelectric response in the ferroelectric polymer P(VDF-TrFE) for MEMS resonators. Mater. Res. Lett. 2021, 9, 195–203. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, L.; Zheng, Y.; Qin, Y.; Wang, Z.L. Enhancing the performance of triboelectric nanogenerator through piror-charge injection and its application on self-powered anticorrosion. Nano Energy 2014, 10, 37–43. [Google Scholar] [CrossRef]
- Huang, H.; Zhu, F.; Zhu, J.; Wang, B.; Qian, Z. A general approach for dispersion relations in multilayered structures with an aribitrary number of piezoelectric layers and elastic layers. Acta Mater. 2020, 231, 489–502. [Google Scholar]
- Jian, G.; Meng, Q.; Jiao, Y.; Meng, F.; Feng, L.; Shao, H.; Wang, F. Hybrid PDMS-TiO2-stainless steel textiles for triboelectric nanogenerators. Chem. Eng. J. 2021, 417, 127974. [Google Scholar] [CrossRef]
- Wen, D.L.; Liu, X.; Deng, H.T.; Sun, D.H.; Qian, H.Y.; Brugger, J.; Zhang, X.S. Printed silk-fibroin-based triboelectric nanogenerators for multi-functional wearable sensing. Nano Energy 2019, 66, 104123. [Google Scholar] [CrossRef]
- He, W.; Liu, W.; Chen, J.; Wang, Z.; Liu, Y.; Pu, X.; Yang, H.; Tang, Q.; Yang, H.; Guo, H.; et al. Boosting output performance of sliding mode triboelectric nanogenerator by charge space-accumulation effect. Nat. Commun. 2020, 11, 4277. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Xie, Y.; Niu, S.; Lin, L.; Wang, Z.L. Freestanding triboelectric-layer-based nanogenerators for harvesting energy from a moving object or human motion in contact and non-contact modes. Adv. Mater. 2014, 26, 2818–2824. [Google Scholar] [CrossRef] [PubMed]
- Hu, D.; Yao, M.; Fan, Y.; Ma, C.; Fan, M.; Liu, M. Strategies to achieve high performance piezoelectric nanogenerators. Nano Energy 2010, 55, 288–304. [Google Scholar] [CrossRef]
- Maria Joseph Raj, N.P.; Khandelwal, G.; Kim, S.J. 0.8BNT-0.2BKT ferroelectric based multimode energy harvester for self-powered body motion sensors. Nano Energy 2021, 83, 105848. [Google Scholar] [CrossRef]
- Xin, Y.; Qi, X.; Tian, H.; Guo, C.; Li, X.; Lin, J.; Wang, C. Full-fiber piezoelectric sensor by straight PVDF/nanoclay nanofibers. Mater. Lett. 2016, 164, 136–139. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jian, G.; Yang, N.; Zhu, S.; Meng, Q.; Ouyang, C. A Mousepad Triboelectric-Piezoelectric Hybrid Nanogenerator (TPHNG) for Self-Powered Computer User Behavior Monitoring Sensors and Biomechanical Energy Harvesting. Polymers 2023, 15, 2462. https://doi.org/10.3390/polym15112462
Jian G, Yang N, Zhu S, Meng Q, Ouyang C. A Mousepad Triboelectric-Piezoelectric Hybrid Nanogenerator (TPHNG) for Self-Powered Computer User Behavior Monitoring Sensors and Biomechanical Energy Harvesting. Polymers. 2023; 15(11):2462. https://doi.org/10.3390/polym15112462
Chicago/Turabian StyleJian, Gang, Ning Yang, Shangtao Zhu, Qingzhen Meng, and Chun Ouyang. 2023. "A Mousepad Triboelectric-Piezoelectric Hybrid Nanogenerator (TPHNG) for Self-Powered Computer User Behavior Monitoring Sensors and Biomechanical Energy Harvesting" Polymers 15, no. 11: 2462. https://doi.org/10.3390/polym15112462
APA StyleJian, G., Yang, N., Zhu, S., Meng, Q., & Ouyang, C. (2023). A Mousepad Triboelectric-Piezoelectric Hybrid Nanogenerator (TPHNG) for Self-Powered Computer User Behavior Monitoring Sensors and Biomechanical Energy Harvesting. Polymers, 15(11), 2462. https://doi.org/10.3390/polym15112462