

Development of MWCNT/Magnetite Flexible Triboelectric Sensors by Magnetic Patterning
 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Characterisation
2.2. Composite Fabrication and Characterisation
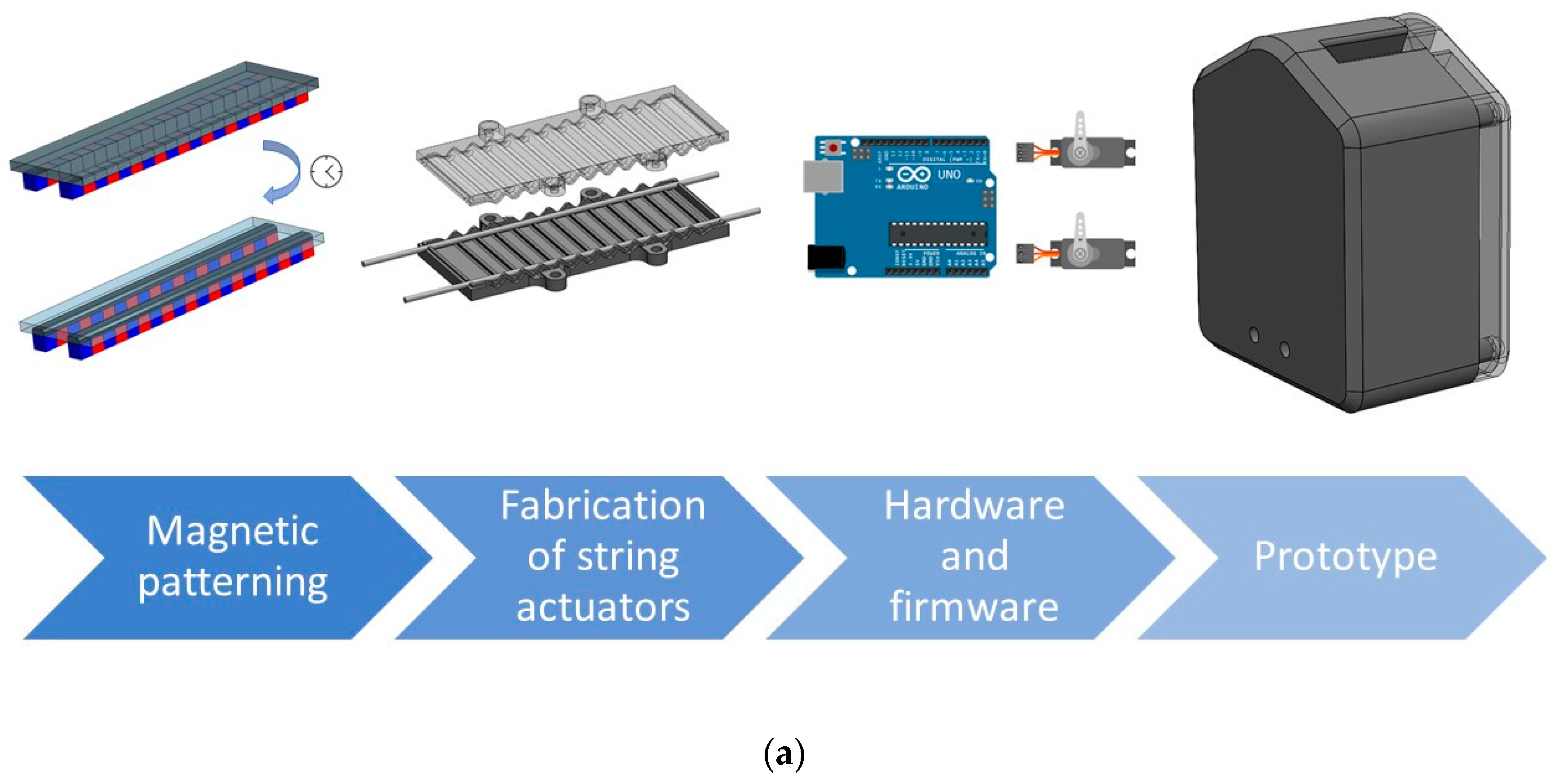
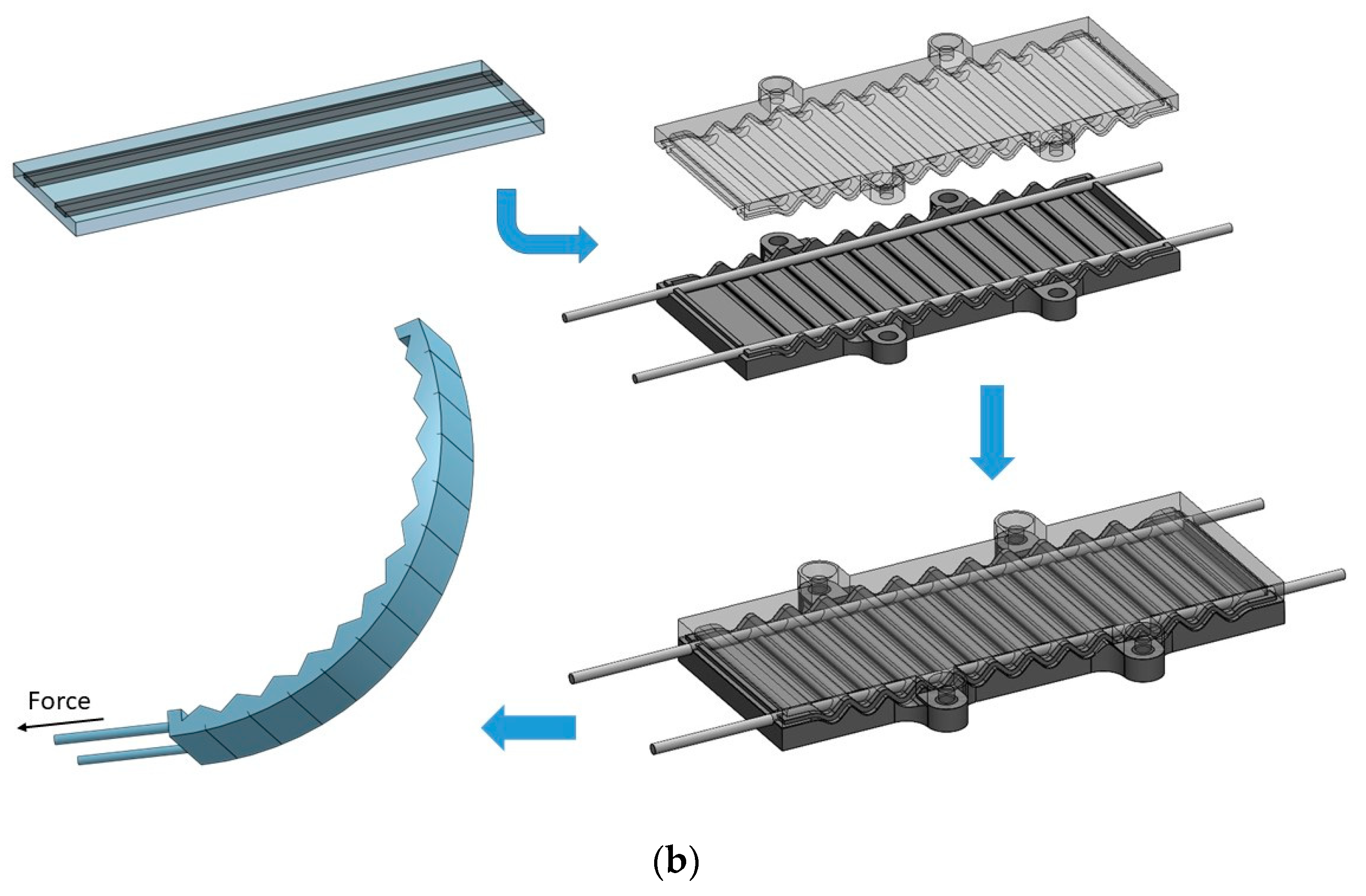
2.3. Prototype Development and Testing
3. Results and Discussion
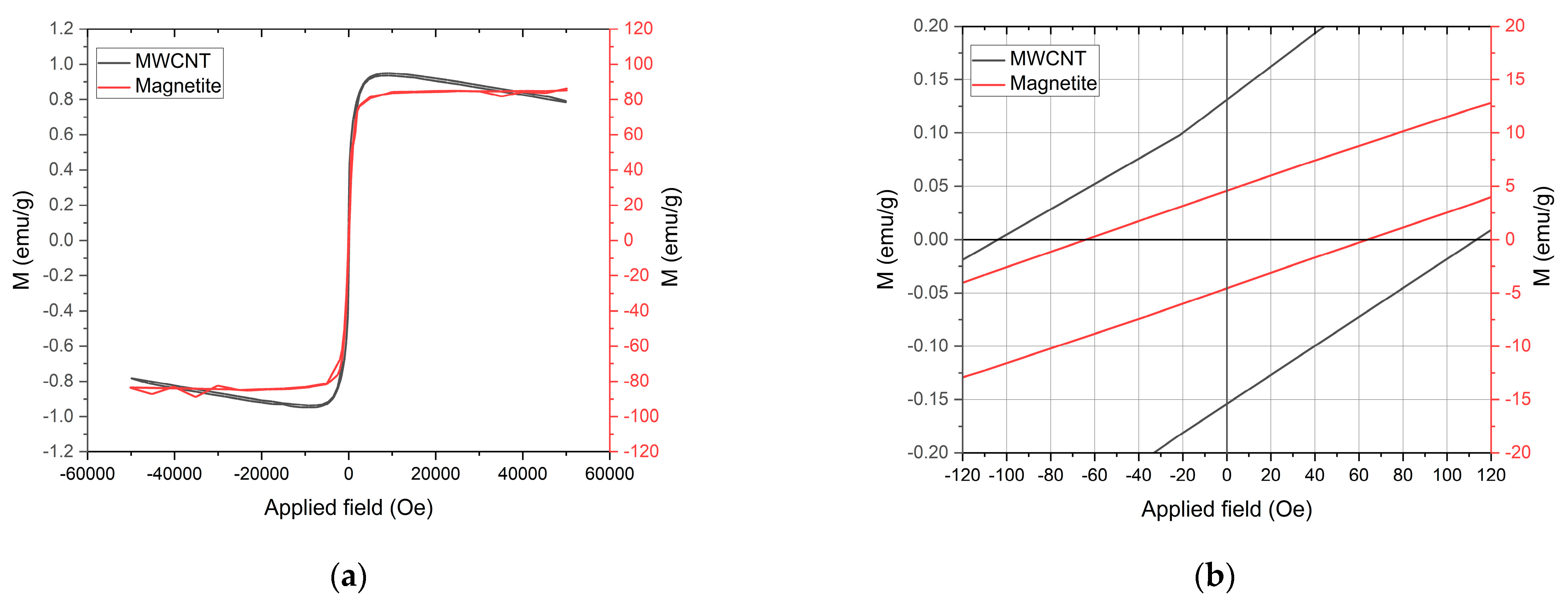
3.1. Materials and Characterisation
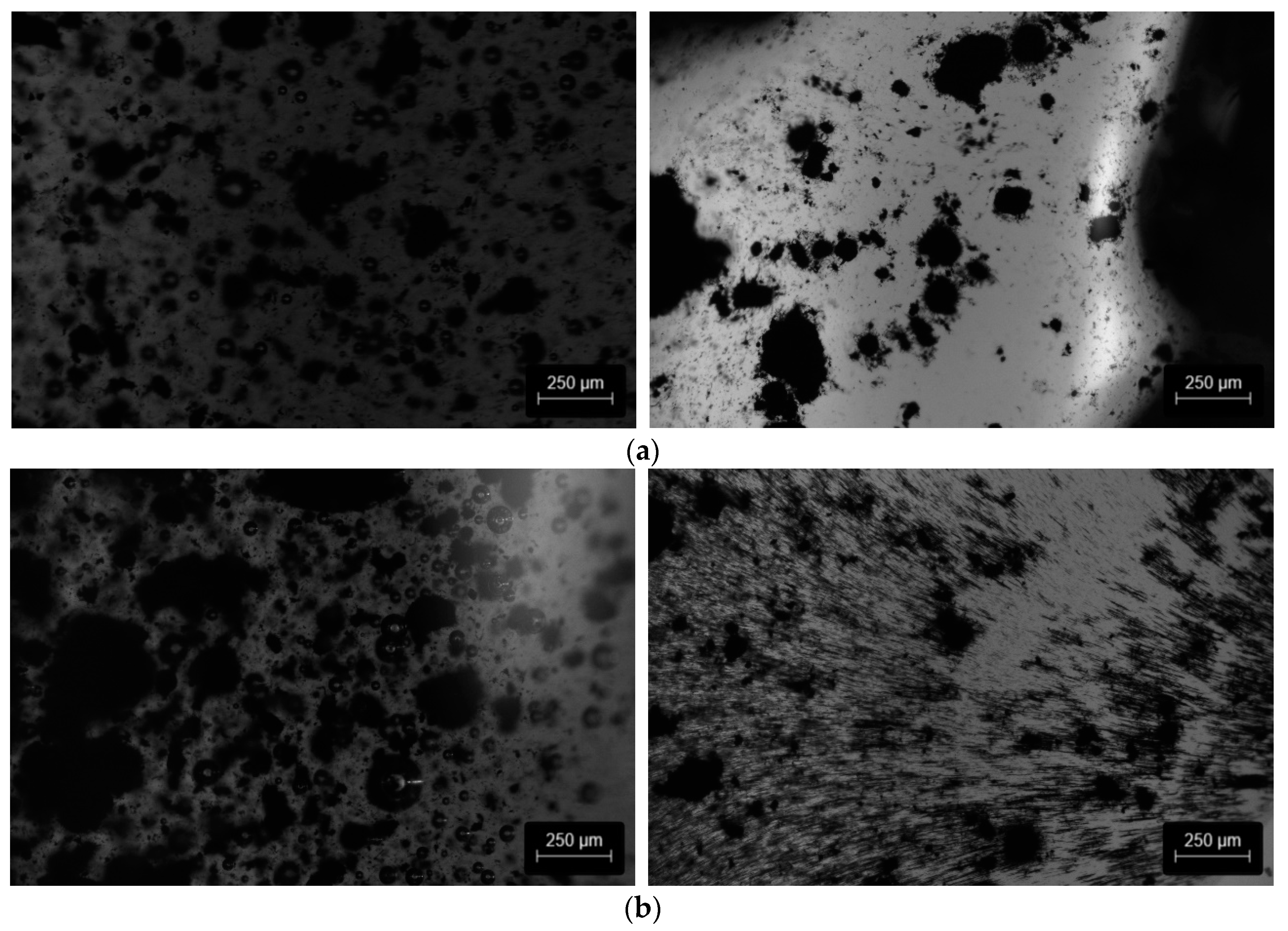
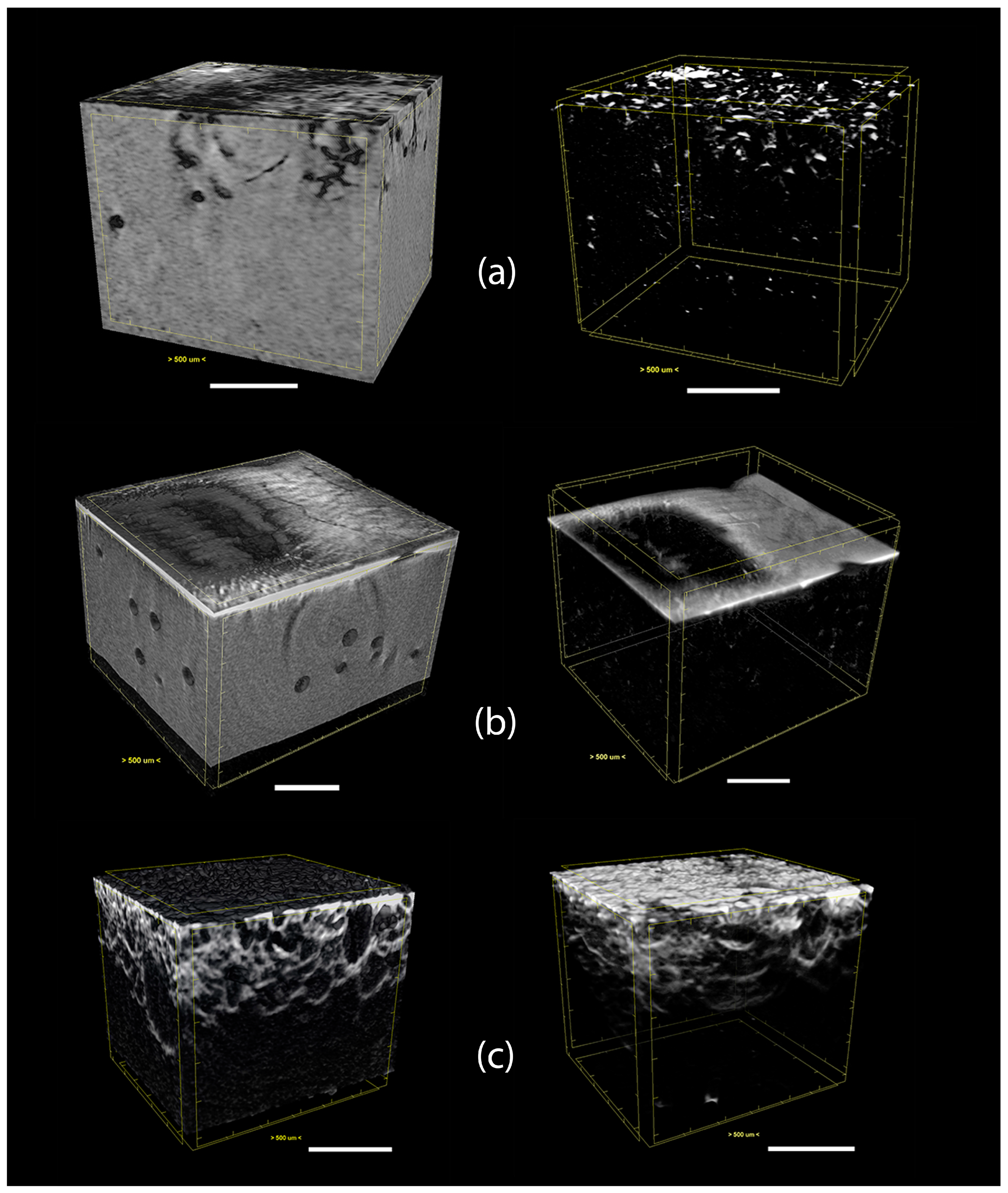
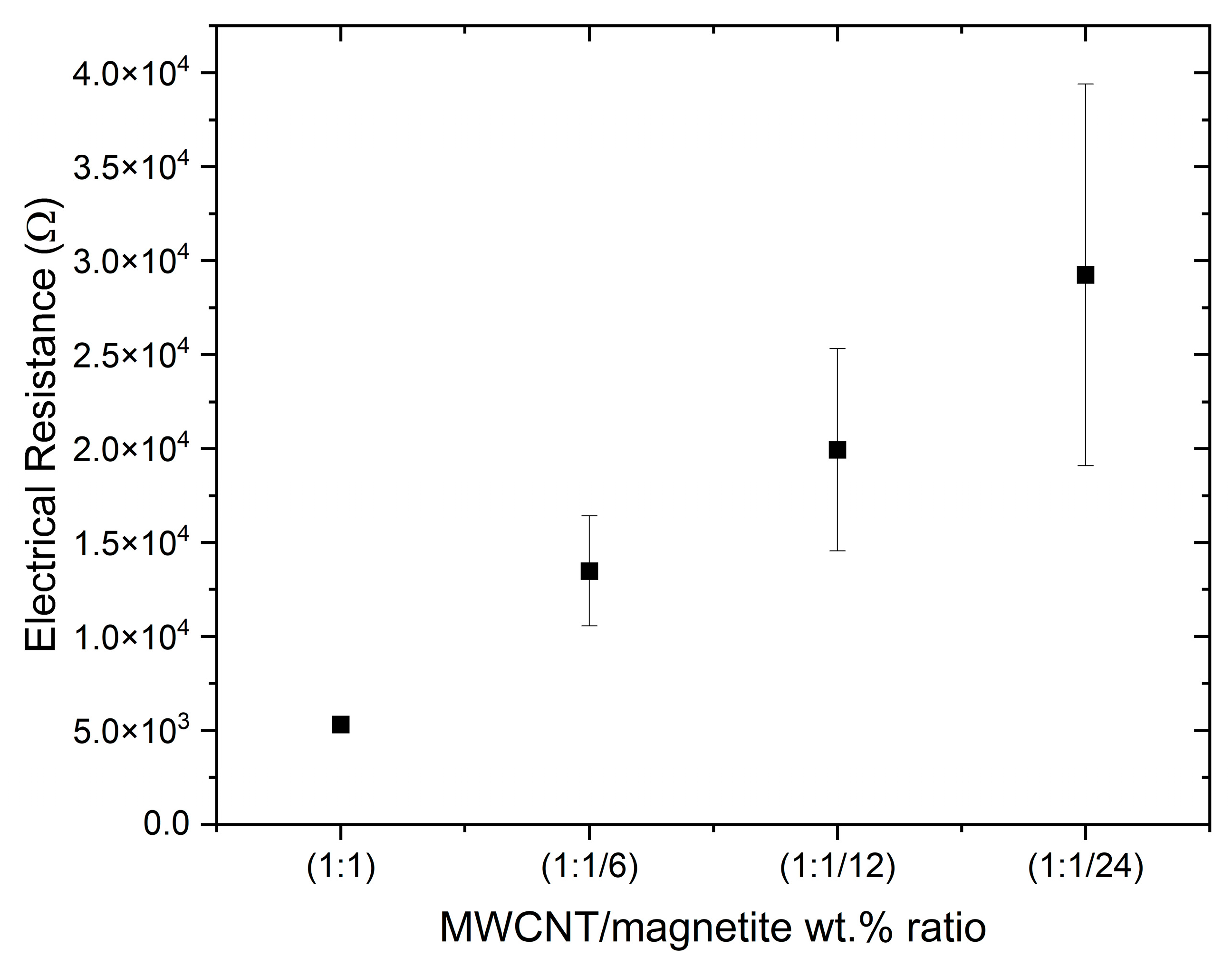
3.2. Composite Fabrication and Characterisation
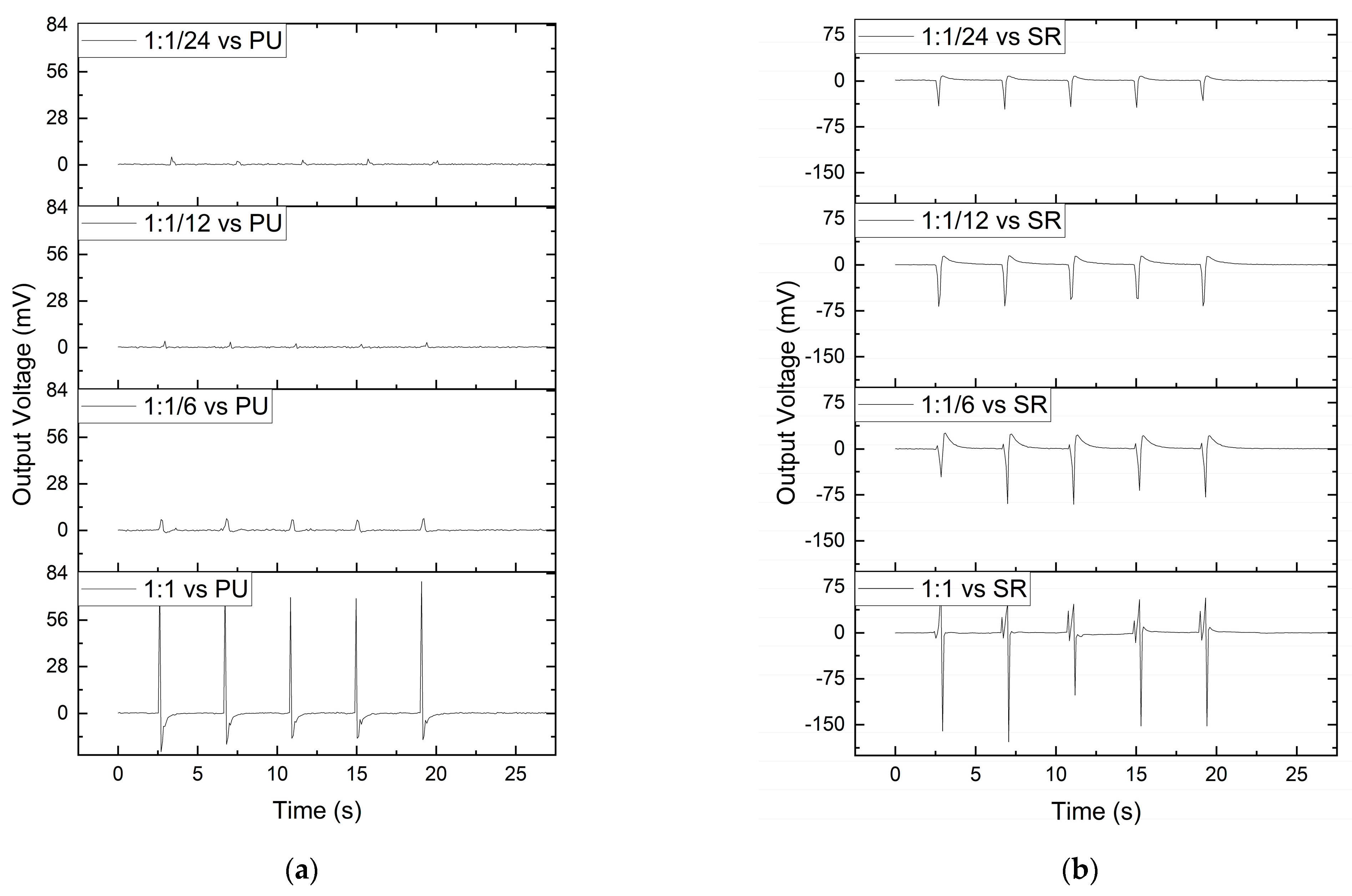
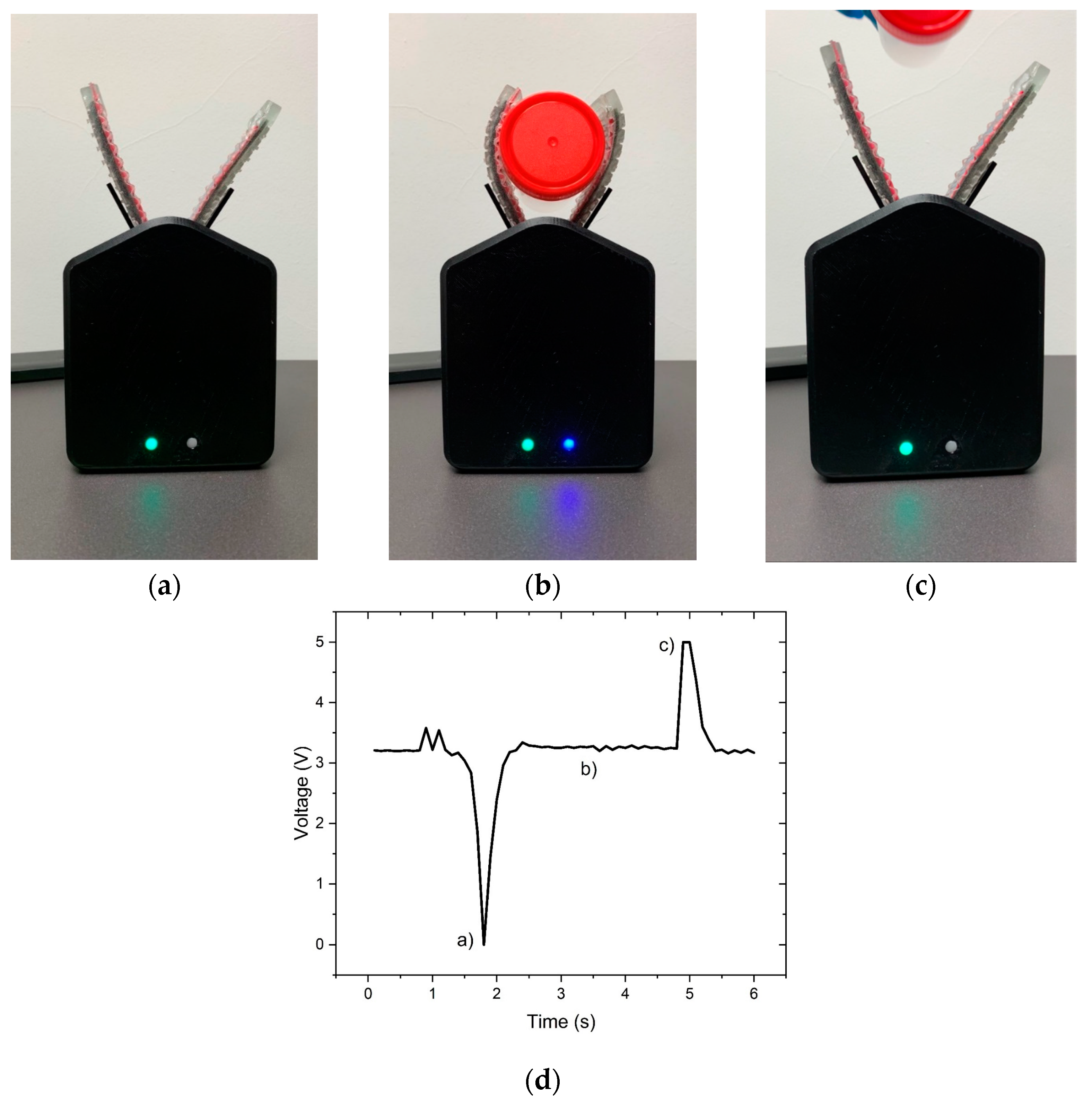
3.3. Prototype Development and Testing
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rus, D.; Tolley, M.T. Design, Fabrication and Control of Soft Robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Park, H.-L.; Lee, Y.; Kim, N.; Seo, D.-G.; Go, G.-T.; Lee, T.-W. Flexible Neuromorphic Electronics for Computing, Soft Robotics, and Neuroprosthetics. Adv. Mater. 2020, 32, 1903558. [Google Scholar] [CrossRef]
- Kar, D.; George, B.; Sridharan, K. A Review on Flexible Sensors for Soft Robotics. In Systems for Printed Flexible Sensors: Design and Implementation; IOP Publishing Ltd.: Bristol, UK, 2022. [Google Scholar]
- White, E.L.; Case, J.C.; Kramer, R.K. Multi-Mode Strain and Curvature Sensors for Soft Robotic Applications. Sens. Actuators A Phys. 2017, 253, 188–197. [Google Scholar] [CrossRef] [Green Version]
- Ren, L.; Li, B.; Wei, G.; Wang, K.; Song, Z.; Wei, Y.; Ren, L.; Liu, Q. Biology and Bioinspiration of Soft Robotics: Actuation, Sensing, and System Integration. Iscience 2021, 24, 103075. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, P.; Quan, J.; Li, L.; Zhang, G.; Zhou, D. Progress, Challenges, and Prospects of Soft Robotics for Space Applications. Adv. Intell. Syst. 2023, 5, 2200071. [Google Scholar] [CrossRef]
- Verified Market Research. Global Soft Robotics Market Size by Type (Soft Grippers, Co-Robots, Inflated Robots), by Application (Medical and Healthcare, Food and Beverages, Logistics), by Geographic Scope and Forecast. Available online: https://www.verifiedmarketresearch.com/product/soft-robotics-market/ (accessed on 7 May 2023).
- Terrile, S.; Argüelles, M.; Barrientos, A. Comparison of Different Technologies for Soft Robotics Grippers. Sensors 2021, 21, 3253. [Google Scholar] [CrossRef]
- Xie, M.; Zhu, M.; Yang, Z.; Okada, S.; Kawamura, S. Flexible Self-Powered Multifunctional Sensor for Stiffness-Tunable Soft Robotic Gripper by Multimaterial 3D Printing. Nano Energy 2021, 79, 105438. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Totaro, M.; Beccai, L. Toward Perceptive Soft Robots: Progress and Challenges. Adv. Sci. 2018, 5, 1800541. [Google Scholar] [CrossRef]
- Chen, J.; Han, K.; Luo, J.; Xu, L.; Tang, W.; Wang, Z.L. Soft Robots with Self-Powered Configurational Sensing. Nano Energy 2020, 77, 105171. [Google Scholar] [CrossRef]
- Jin, T.; Sun, Z.; Li, L.; Zhang, Q.; Zhu, M.; Zhang, Z.; Yuan, G.; Chen, T.; Tian, Y.; Hou, X. Triboelectric Nanogenerator Sensors for Soft Robotics Aiming at Digital Twin Applications. Nat. Commun. 2020, 11, 5381. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, B.; Zhao, D.; Gao, Q.; Wang, Z.L.; Cheng, T. Nondestructive Dimension Sorting by Soft Robotic Grippers Integrated with Triboelectric Sensor. ACS Nano 2022, 16, 3008–3016. [Google Scholar] [CrossRef]
- Chen, S.; Pang, Y.; Yuan, H.; Tan, X.; Cao, C. Smart Soft Actuators and Grippers Enabled by Self-Powered Tribo-Skins. Adv. Mater. Technol. 2020, 5, 1901075. [Google Scholar] [CrossRef]
- Lee, Y.; Song, W.J.; Sun, J.-Y. Hydrogel Soft Robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar] [CrossRef]
- Pagoli, A.; Chapelle, F.; Corrales-Ramon, J.-A.; Mezouar, Y.; Lapusta, Y. Large-Area and Low-Cost Force/Tactile Capacitive Sensor for Soft Robotic Applications. Sensors 2022, 22, 4083. [Google Scholar] [CrossRef]
- Jang, H.G.; Yang, B.; Khil, M.-S.; Kim, S.Y.; Kim, J. Comprehensive Study of Effects of Filler Length on Mechanical, Electrical, and Thermal Properties of Multi-Walled Carbon Nanotube/Polyamide 6 Composites. Compos. Part A Appl. Sci. Manuf. 2019, 125, 105542. [Google Scholar] [CrossRef]
- Esteves, D.S.; Durães, N.; Pedroso, R.; Melo, A.; Paiva, M.C.; Sequeiros, E.W. Fabrication of Low Electrical Percolation Threshold Multi-Walled Carbon Nanotube Sensors Using Magnetic Patterning. Appl. Sci. 2023, 13, 1437. [Google Scholar] [CrossRef]
- Gong, T.; Peng, S.-P.; Bao, R.-Y.; Yang, W.; Xie, B.-H.; Yang, M.-B. Low Percolation Threshold and Balanced Electrical and Mechanical Performances in Polypropylene/Carbon Black Composites with a Continuous Segregated Structure. Compos. Part B Eng. 2016, 99, 348–357. [Google Scholar] [CrossRef]
- Wittmann, L.; Turrina, C.; Schwaminger, S.P. The Effect of PH and Viscosity on Magnetophoretic Separation of Iron Oxide Nanoparticles. Magnetochemistry 2021, 7, 80. [Google Scholar] [CrossRef]
- Huang, Y.; Jiao, W.; Niu, Y.; Ding, G.; Wang, R. Improving the Mechanical Properties of Fe3O4/Carbon Nanotube Reinforced Nanocomposites by a Low-Magnetic-Field Induced Alignment. J. Polym. Eng. 2018, 38, 731–738. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, H.; Wang, S.; Shi, W.; He, J.; Liu, H.; Huang, Y. Fe3O4–MWCNT Magnetic Nanocomposites as Efficient Peroxidase Mimic Catalysts in a Fenton-like Reaction for Water Purification without PH Limitation. RSC Adv. 2014, 4, 45809–45815. [Google Scholar] [CrossRef]
- Zheng, J.; Zhang, M.; Ling, Y.; Xu, J.; Hu, S.; Hayat, T.; Alharbi, N.S.; Yang, F. Fabrication of One Dimensional CNTs/Fe3O4@ PPy/Pd Magnetic Composites for the Accumulation and Electrochemical Detection of Triclosan. J. Electroanal. Chem. 2018, 818, 97–105. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Zhu, L.; Yang, B.; Yu, R. Necklace-like Fe3O4 Nanoparticle Beads on Carbon Nanotube Threads for Microwave Absorption and Supercapacitors. Mater. Des. 2020, 189, 108517. [Google Scholar] [CrossRef]
- Ghoderao, P.; Sahare, S.; Alegaonkar, P.; Kulkarni, A.A.; Bhave, T. Multiwalled Carbon Nanotubes Decorated with Fe3O4 Nanoparticles for Efficacious Doxycycline Delivery. ACS Appl. Nano Mater. 2018, 2, 607–616. [Google Scholar] [CrossRef]
- Arvand, M.; Hassannezhad, M. Magnetic Core–Shell Fe3O4@SiO2/MWCNT Nanocomposite Modified Carbon Paste Electrode for Amplified Electrochemical Sensing of Uric Acid. Mater. Sci. Eng. C 2014, 36, 160–167. [Google Scholar] [CrossRef]
- Dong, M.; Tong, Z.; Qi, P.; Qin, L. Enhanced Electrical/Dielectrical Properties of MWCNT@ Fe3O4/Polyimide Flexible Composite Film Aligned by Magnetic Field. J. Mater. Sci. Mater. Electron. 2021, 32, 524–542. [Google Scholar] [CrossRef]
- McCloskey, K.E.; Chalmers, J.J.; Zborowski, M. Magnetic Cell Separation: Characterization of Magnetophoretic Mobility. Anal. Chem. 2003, 75, 6868–6874. [Google Scholar] [CrossRef]
- Musa, U.G.; Cezan, S.D.; Baytekin, B.; Baytekin, H.T. The Charging Events in Contact-Separation Electrification. Sci. Rep. 2018, 8, 2472. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zheng, Q.; Wang, Z.L.; Li, Z. Nanogenerator-Based Self-Powered Sensors for Wearable and Implantable Electronics. Research 2020, 2020, 8710686. [Google Scholar] [CrossRef] [Green Version]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esteves, D.S.; Pereira, M.F.C.; Ribeiro, A.; Durães, N.; Paiva, M.C.; Sequeiros, E.W. Development of MWCNT/Magnetite Flexible Triboelectric Sensors by Magnetic Patterning. Polymers 2023, 15, 2870. https://doi.org/10.3390/polym15132870
Esteves DS, Pereira MFC, Ribeiro A, Durães N, Paiva MC, Sequeiros EW. Development of MWCNT/Magnetite Flexible Triboelectric Sensors by Magnetic Patterning. Polymers. 2023; 15(13):2870. https://doi.org/10.3390/polym15132870
Chicago/Turabian StyleEsteves, David Seixas, Manuel F. C. Pereira, Ana Ribeiro, Nelson Durães, Maria C. Paiva, and Elsa W. Sequeiros. 2023. "Development of MWCNT/Magnetite Flexible Triboelectric Sensors by Magnetic Patterning" Polymers 15, no. 13: 2870. https://doi.org/10.3390/polym15132870