
Wearable and Stretchable SEBS/CB Polymer Conductive Strand as a Piezoresistive Strain Sensor

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Results and Discussion
2.1. Morphology (SEM)
2.2. Percolation as a Factor for Piezoresistivity Sensing Material Selection
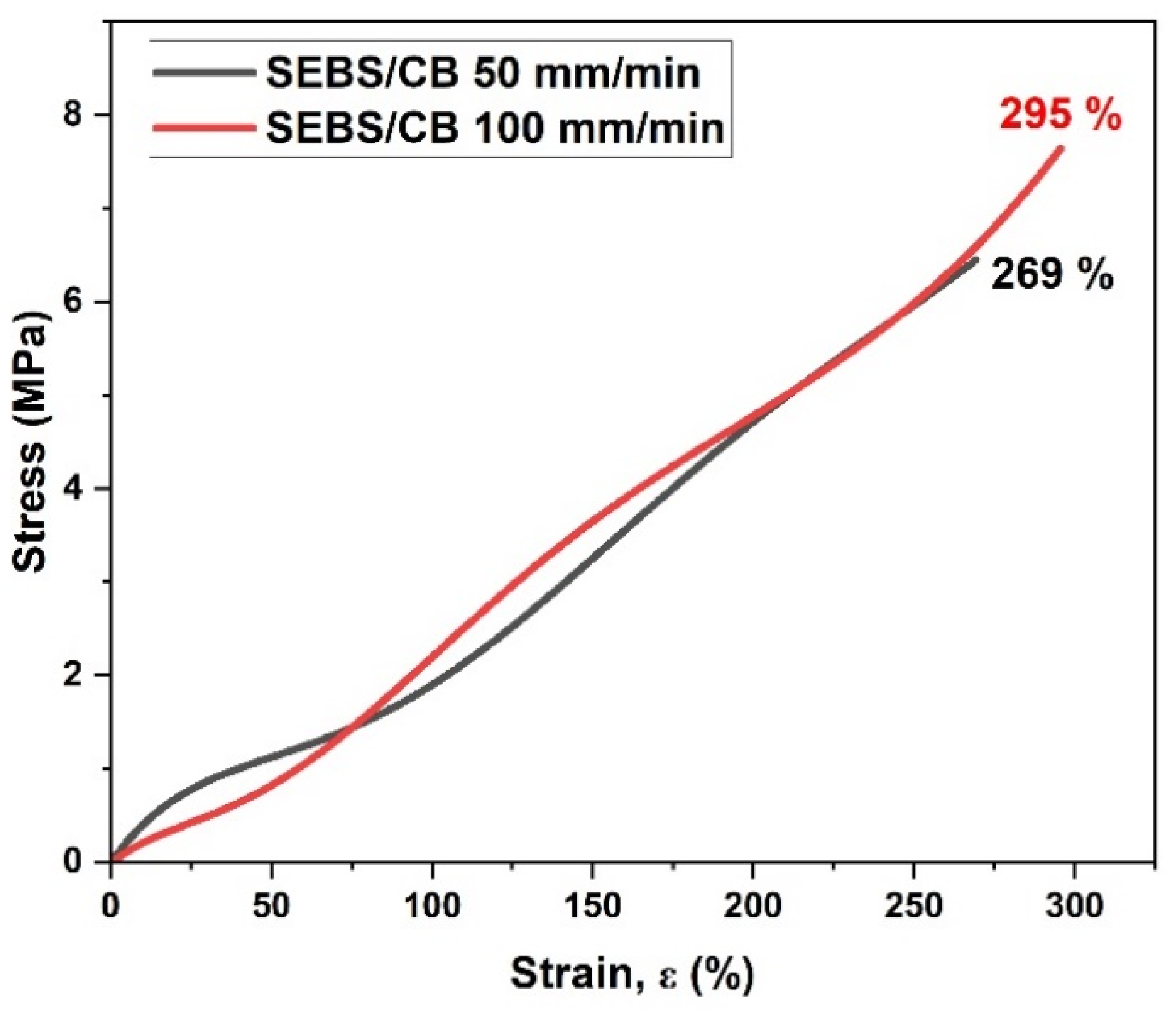
2.3. Mechanical Properties
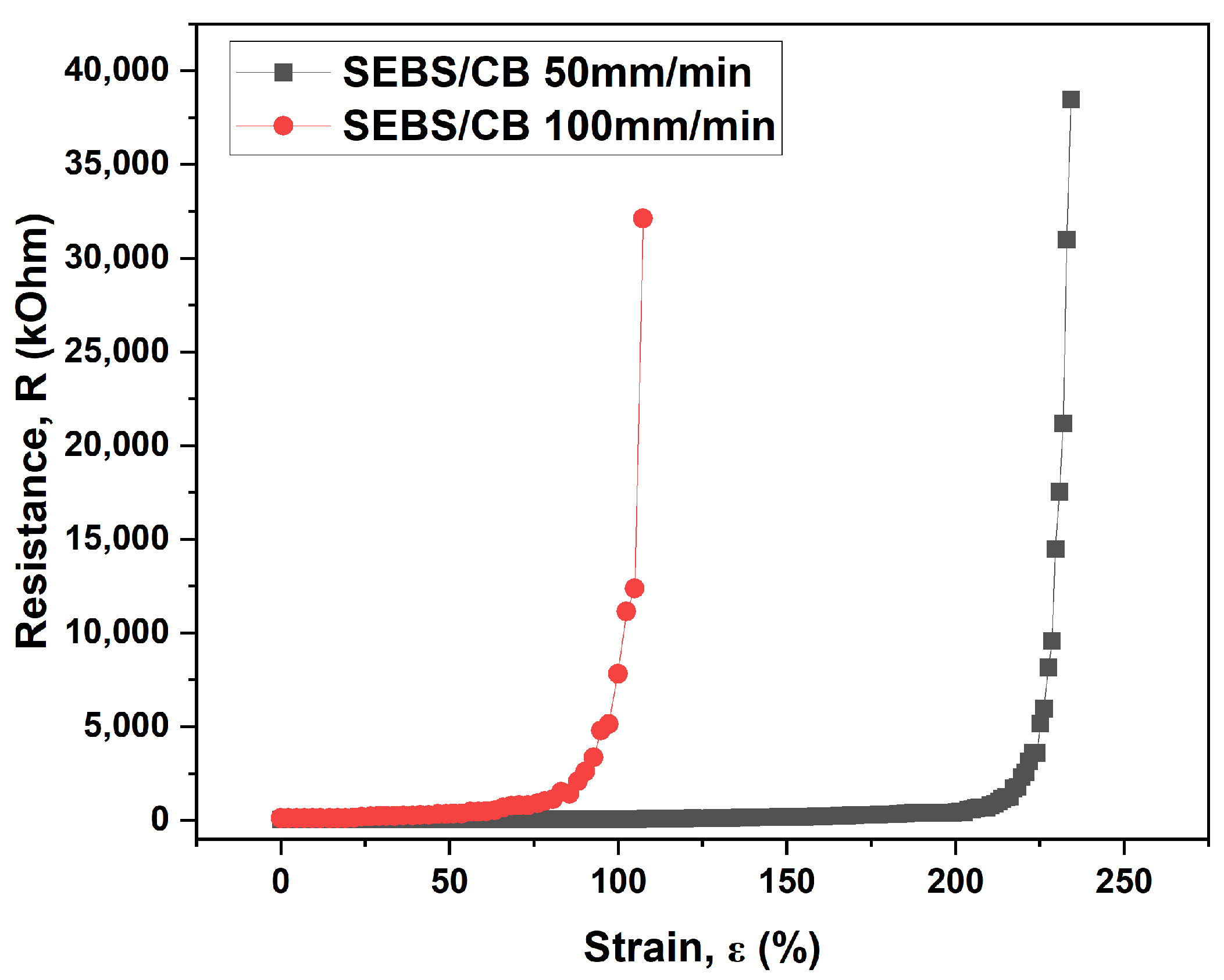
2.4. Electromechanical Properties
2.5. Gauge Factor and Piezoresistivity Analysis
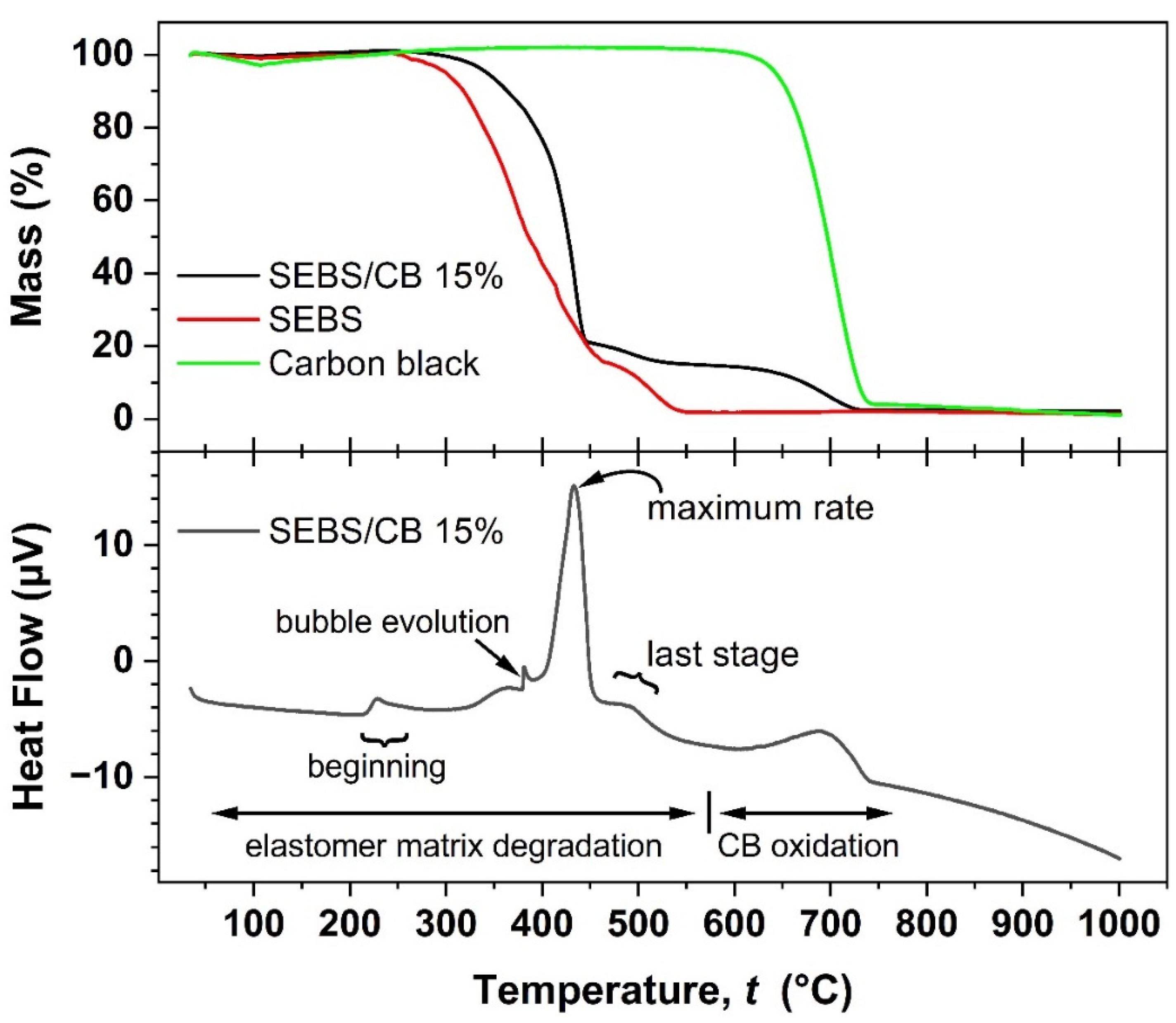
2.6. Thermal Properties (TGA-DSC)
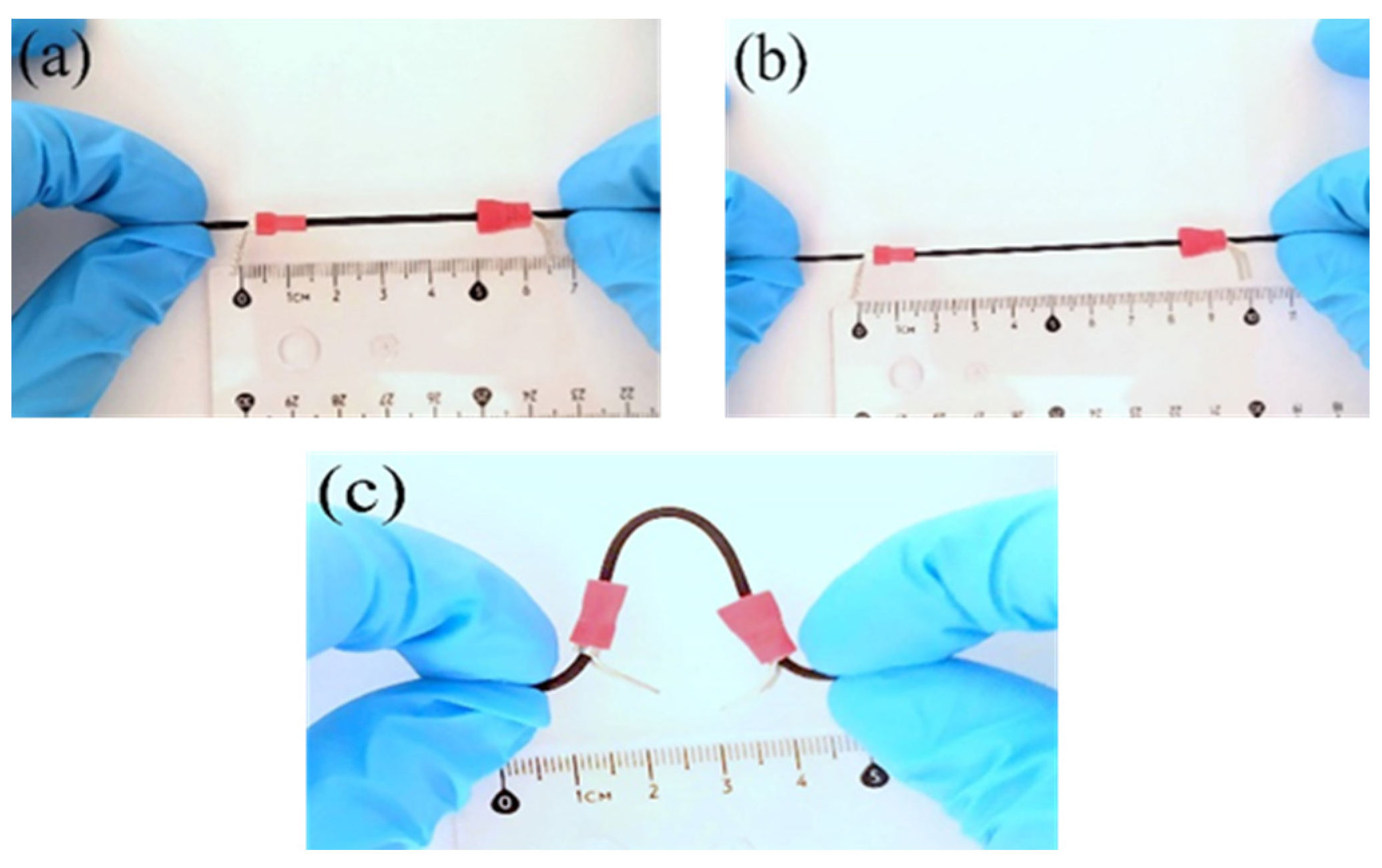
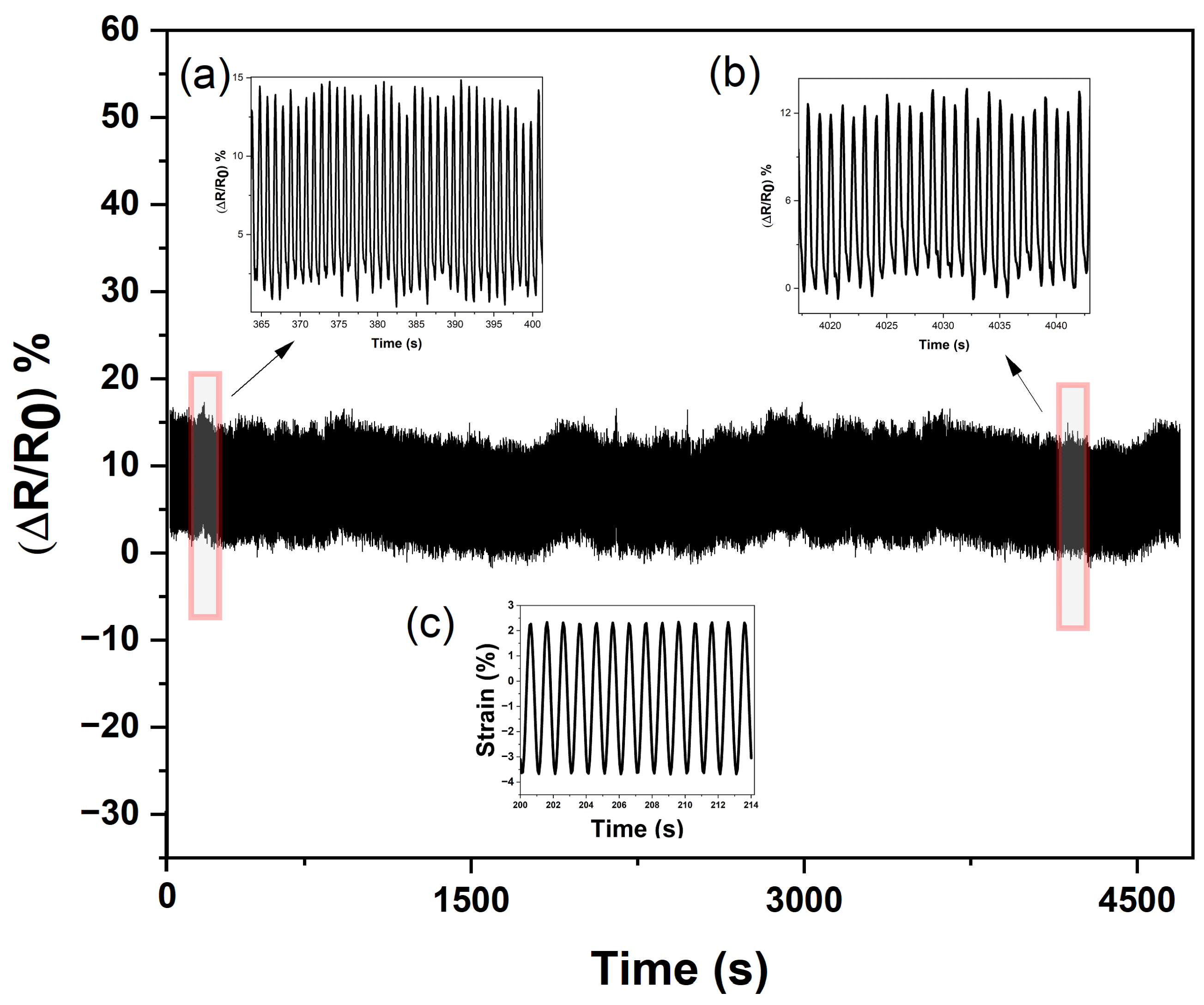
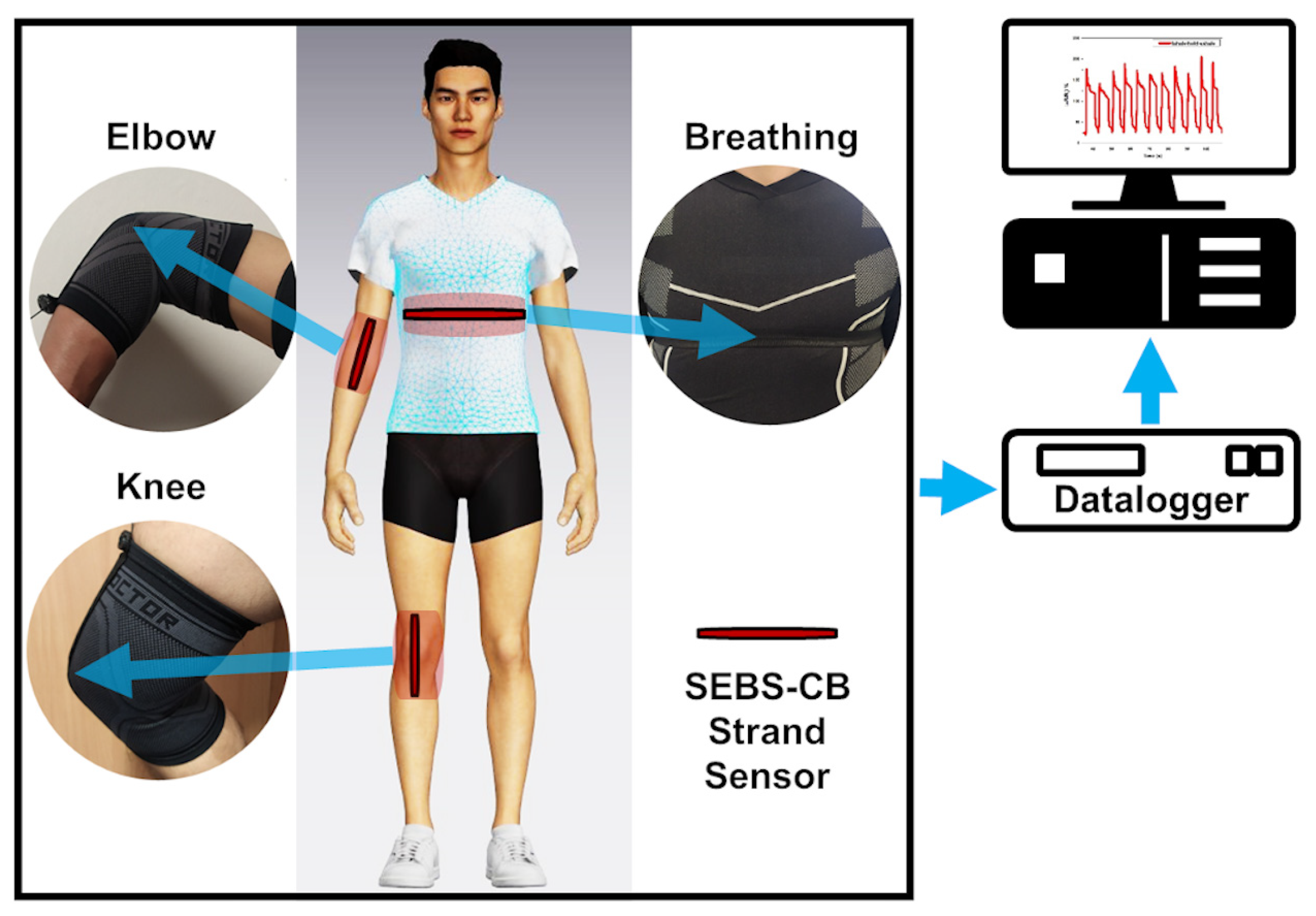
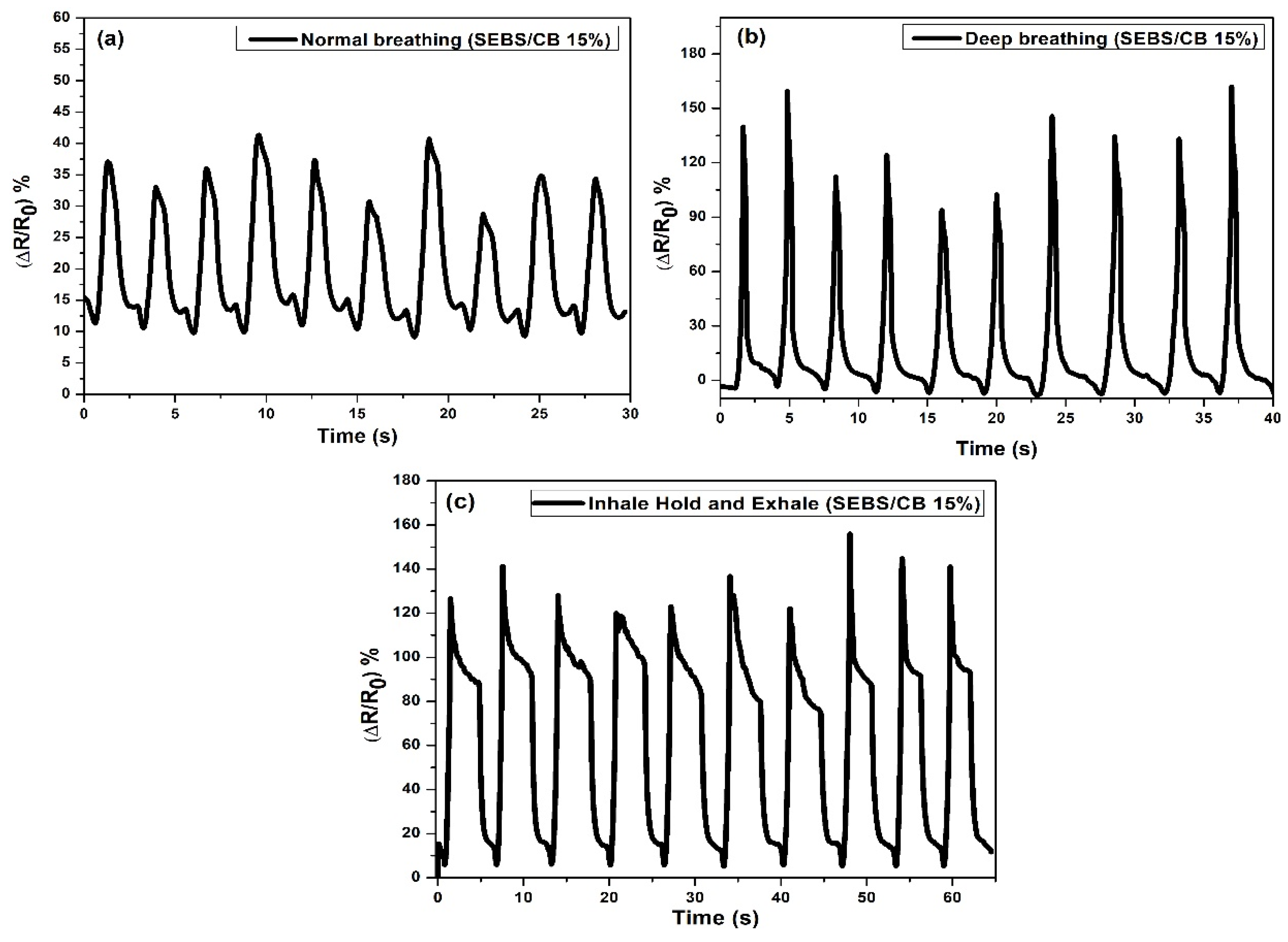
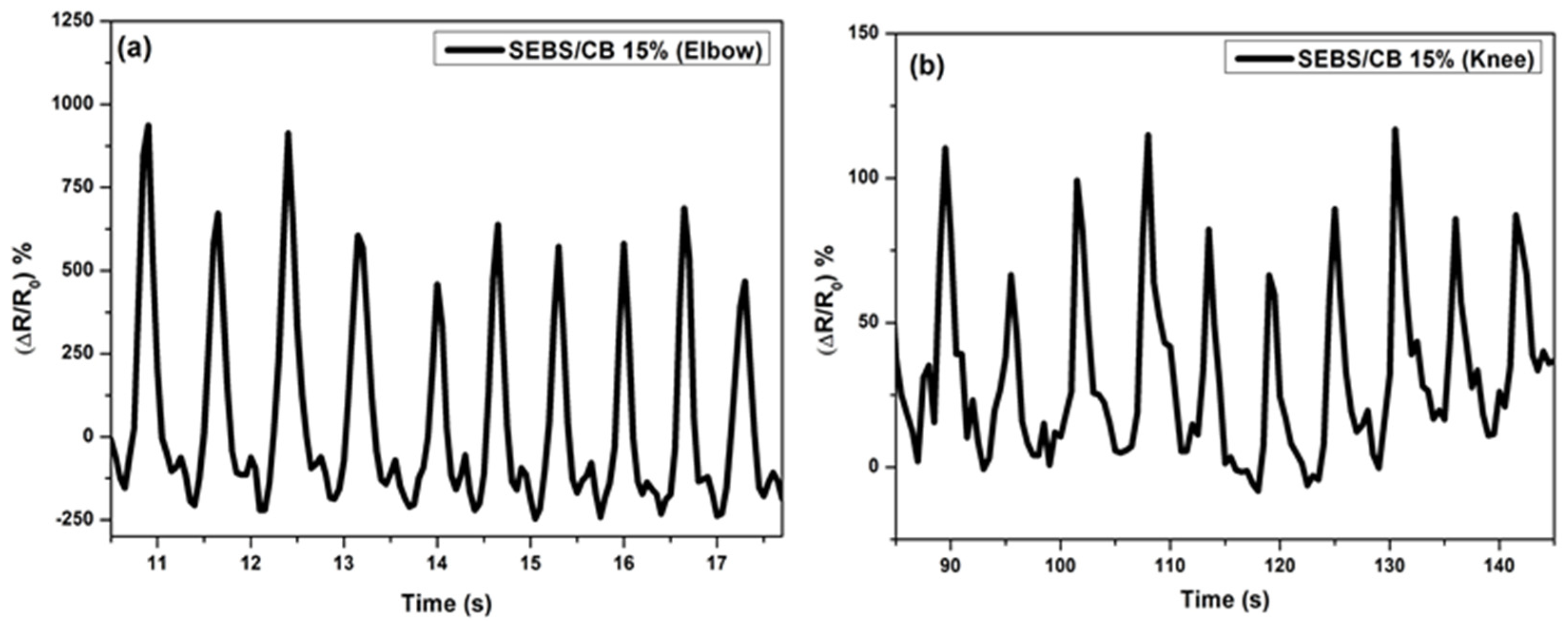
2.7. Piezoresistive Wearable Sensor
3. Materials and Methods
3.1. Materials
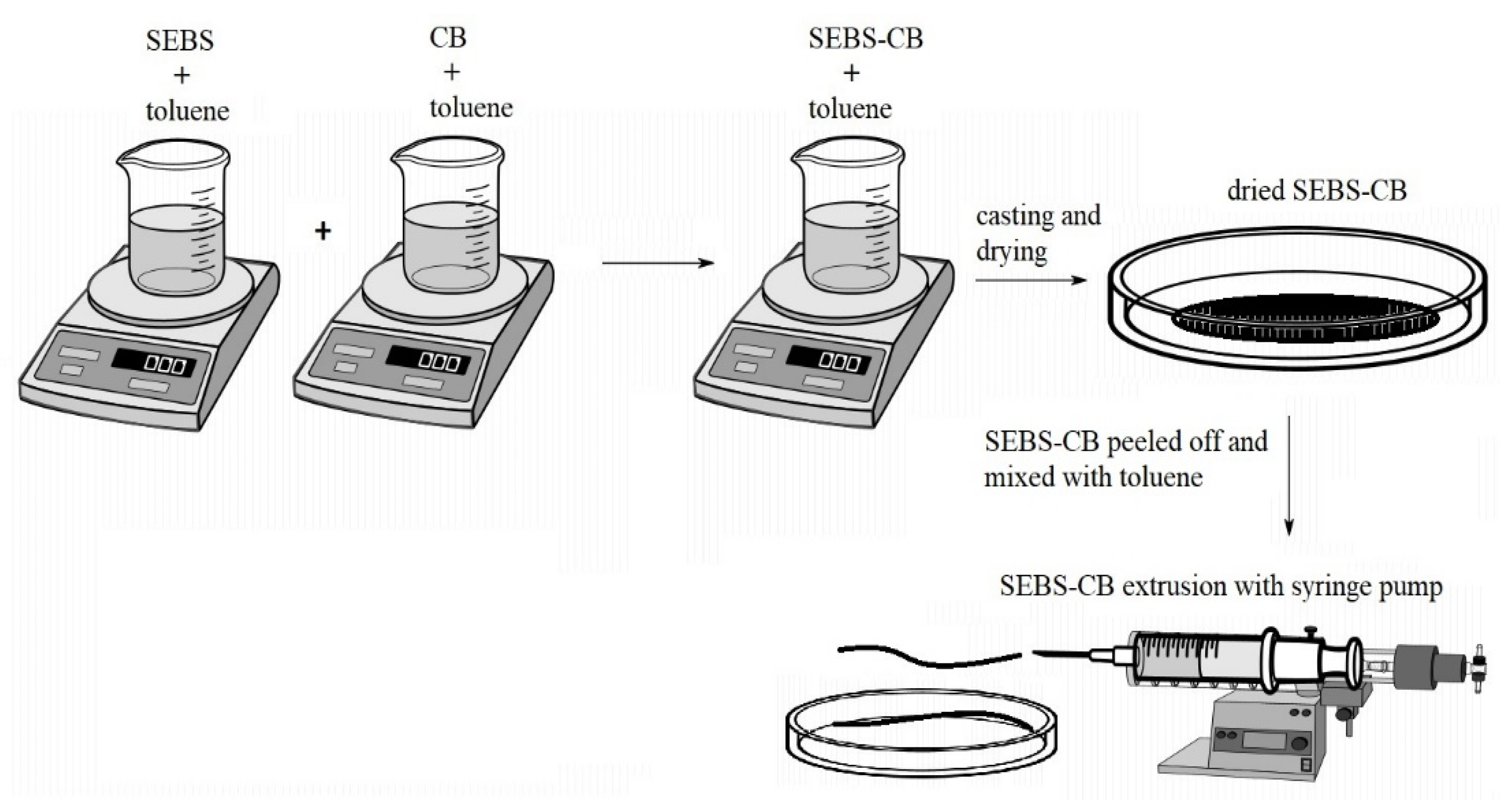
3.2. SEBS/CB Nanocomposite Preparation
3.3. Scanning Electron Microscopy (SEM)
3.4. Thermogravimetric Analysis (TGA)
3.5. Percolation Measurement
3.6. Mechanical and Electromechanical Test
3.7. Sensor Test
4. Conclusions
- The solution-processing technique for preparing the SEBS/CB sensors is the first of its kind;
- The high flexibility of the sensor measured up to 300% (Figure 3);
- The highest sensitivity of the SEBS/CB was achieved at a CB concentration of 15% (by volume);
- A wearable piezoresistive sensor was demonstrated with the SEBS/CB 15% sensor.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nguyen, T.; Dinh, T.; Phan, H.P.; Pham, T.A.; Dau, V.T.; Nguyen, N.T.; Dao, D.V. Advances in ultrasensitive piezoresistive sensors: From conventional to flexible and stretchable applications. Mater. Horiz. 2021, 8, 2123–2150. [Google Scholar] [CrossRef] [PubMed]
- Fiorillo, A.S.; Critello, C.D.; Pullano, A.S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Fraden, J. Handbook of Modern Sensors: Physics, Designs, and Applications, 5th ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Liu, X.; Miao, J.; Fan, Q.; Zhang, W.; Zuo, X.; Tian, M.; Zhu, S.; Zhang, X.; Qu, L. Recent Progress on Smart Fiber and Textile Based Wearable Strain Sensors: Materials, Fabrications and Applications. Adv. Fiber Mater. 2022, 4, 361–389. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Avellar, L.; Frizera, A.; Marques, C. Smart textiles for multimodal wearable sensing using highly stretchable multiplexed optical fiber system. Sci. Rep. 2020, 10, 13867. [Google Scholar] [CrossRef]
- Lin, S.; Hu, S.; Song, W.; Gu, M.; Liu, J.; Song, J.; Liu, Z.; Li, Z.; Huang, K.; Wu, Y.; et al. An ultralight, flexible, and biocompatible all-fiber motion sensor for artificial intelligence wearable electronics. Npj Flex. Electron. 2022, 6, 27. [Google Scholar] [CrossRef]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.M. Fiber-based wearable electronics: A review of materials, fabrication, devices, and applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef]
- Jin, H.; Abu-Raya, Y.S.; Haick, H. Advanced Materials for Health Monitoring with Skin-Based Wearable Devices. Adv. Healthc. Mater. 2017, 6, 1700024. [Google Scholar] [CrossRef]
- Gao, L.; Zhu, C.; Li, L.; Zhang, C.; Liu, J.; Yu, H.D.; Huang, W. All Paper-Based Flexible and Wearable Piezoresistive Pressure Sensor. ACS Appl. Mater. Interfaces 2019, 11, 25034–25042. [Google Scholar] [CrossRef]
- Zheng, Q.; Lee, J.; Shen, X.; Chen, X.; Kim, J.-K. Graphene-based wearable piezoresistive physical sensors. Mater. Today 2020, 36, 158–179. [Google Scholar] [CrossRef]
- Dios, J.R.; Gonzalo, B.; Tubio, C.R.; Cardoso, J.; Gonçalves, S.; Miranda, D.; Correia, V.; Viana, J.C.; Costa, P.; Lanceros-Méndez, S. Functional Piezoresistive Polymer-Composites Based on Polycarbonate and Polylactic Acid for Deformation Sensing Applications. Macromol. Mater. Eng. 2020, 305, 2000379. [Google Scholar] [CrossRef]
- Nath, K.; Khanal, S.; Krause, B.; Lach, R. Electrically conductive and piezoresistive polymer nanocomposites using multiwalled carbon nanotubes in a flexible copolyester: Spectroscopic, morphological, mechanical and electrical properties. Nano-Struct. Nano-Objects 2022, 29, 100806. [Google Scholar] [CrossRef]
- Shen, Z.; Feng, J. Mass-produced SEBS/graphite nanoplatelet composites with a segregated structure for highly stretchable and recyclable strain sensors. J. Mater. Chem. C 2019, 7, 9423–9429. [Google Scholar] [CrossRef]
- Cetin, M.S.; Karahan Toprakci, H.A. Flexible electronics from hybrid nanocomposites and their application as piezoresistive strain sensors. Compos. Part B Eng. 2021, 224, 109199. [Google Scholar] [CrossRef]
- Costa, P.; Oliveira, J.; Horta-Romarís, L.; Abad, M.J.; Moreira, J.A.; Zapiráin, I.; Aguado, M.; Galván, S.; Lanceros-Mendez, S. Piezoresistive polymer blends for electromechanical sensor applications. Compos. Sci. Technol. 2018, 168, 353–362. [Google Scholar] [CrossRef]
- Padovano, E.; Bonelli, M.E.; Veca, A.; De Meo, E.; Badini, C. Effect of long-term mechanical cycling and laser surface treatment on piezoresistive properties of SEBS-CNTs composites. React. Funct. Polym. 2020, 152, 104601. [Google Scholar] [CrossRef]
- Ma, L.; Lei, X.; Li, S.; Guo, S.; Yuan, J.; Li, X.; Cheng, G.J.; Liu, F. A 3D flexible piezoresistive sensor based on surface-filled graphene nanosheets conductive layer. Sens. Actuators A Phys. 2021, 332, 113144. [Google Scholar] [CrossRef]
- Njuguna, M.K.; Yan, C.; Hu, N.; Bell, J.M.; Yarlagadda, P.K.D.V. Sandwiched carbon nanotube film as strain sensor. Compos. Part B Eng. 2012, 43, 2711–2717. [Google Scholar] [CrossRef] [Green Version]
- Akhtar, I.; Chang, S.H. Radial alignment of carbon nanotubes for directional sensing application. Compos. Part B Eng. 2021, 222, 109038. [Google Scholar] [CrossRef]
- Akhtar, I.; Chang, S.H. Highly aligned carbon nanotubes and their sensor applications. Nanoscale 2020, 12, 21447–21458. [Google Scholar] [CrossRef]
- Zeng, J.; Ma, W.; Wang, Q.; Yu, S.; Innocent, M.T.; Xiang, H.; Zhu, M. Strong, high stretchable and ultrasensitive SEBS/CNTs hybrid fiber for high-performance strain sensor. Compos. Commun. 2021, 25, 100735. [Google Scholar] [CrossRef]
- Sam-daliri, O.; Faller, L.; Farahani, M.; Roshanghias, A. MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring. Electronics 2018, 7, 143. [Google Scholar] [CrossRef] [Green Version]
- Enrique-Jimenez, P.; Quiles-Díaz, S.; Salavagione, H.J.; Wesner, D.; Schönherr, H.; González-Casablanca, J.; García-Quismondo, R.; Martínez, G.; Gómez-Fatou, M.; Ania, F.; et al. Control of the structure and properties of SEBS nanocomposites via chemical modification of graphene with polymer brushes. Eur. Polym. J. 2017, 97, 1–13. [Google Scholar] [CrossRef]
- Costa, P.; Gonçalves, S.; Mora, H.; Carabineiro, S.A.C.; Viana, J.C.; Lanceros-Mendez, S. Highly Sensitive Piezoresistive Graphene-Based Stretchable Composites for Sensing Applications. ACS Appl. Mater. Interfaces 2019, 11, 46286–46295. [Google Scholar] [CrossRef] [PubMed]
- Pan, S.; Pei, Z.; Jing, Z.; Song, J.; Zhang, W.; Zhang, Q.; Sang, S. A highly stretchable strain sensor based on CNT/graphene/fullerene-SEBS. RSC Adv. 2020, 10, 11225–11232. [Google Scholar] [CrossRef] [Green Version]
- Ghabezi, P.; Farahani, M. Effects of Nanoparticles on Nanocomposites Mode I and II Fracture: A Critical Review; Mittal, K.L., Ed.; Scrivener Publishing LLC: Beverly, MA, USA, 2018; Volume 4, pp. 391–411. [Google Scholar] [CrossRef]
- Hofmann, D.; Thomann, R.; Mülhaupt, R. Thermoplastic SEBS Elastomer Nanocomposites Reinforced with Functionalized Graphene Dispersions. Macromol. Mater. Eng. 2018, 303, 1700324. [Google Scholar] [CrossRef]
- Turgut, A.; Tuhin, M.O.; Toprakci, O.; Pasquinelli, M.A.; Spontak, R.J.; Toprakci, H.A.K. Thermoplastic Elastomer Systems Containing Carbon Nanofibers as Soft Piezoresistive Sensors. ACS Omega 2018, 3, 12648–12657. [Google Scholar] [CrossRef]
- Moreno, I.A.E.; Diaz, A.D.; Duarte, M.E.M.; Gómez, R.I. Strain effect on the electrical conductivity of CB/SEBS and GP/SEBS composites. Macromol. Symp. 2009, 283–284, 361–368. [Google Scholar] [CrossRef]
- Yang, X.; Sun, L.; Zhang, C.; Huang, B.; Chu, Y.; Zhan, B. Modulating the sensing behaviors of poly(styrene-ethylene-butylene-styrene)/carbon nanotubes with low-dimensional fillers for large deformation sensors. Compos. Part B Eng. 2019, 160, 605–614. [Google Scholar] [CrossRef]
- Kuester, S.; Merlini, C.; Barra, G.M.O.; Ferreira, J.C.; Lucas, A.; De Souza, A.C.; Soares, B.G. Processing and characterization of conductive composites based on poly(styrene-b-ethylene-ran-butylene-b-styrene) (SEBS) and carbon additives: A comparative study of expanded graphite and carbon black. Compos. Part B Eng. 2016, 84, 236–247. [Google Scholar] [CrossRef]
- Commission EU. Commission recommendation of 18 October 2011 on the definition of nanomaterial (2011/696/EU). Off. J. Eur. Communities Legis 2011, 275, 38. [Google Scholar]
- Jeong, Y.; Park, J.; Lee, J.; Kim, K.; Park, I. Ultrathin, Biocompatible, and Flexible Pressure Sensor with a Wide Pressure Range and Its Biomedical Application. ACS Sens. 2020, 5, 481–489. [Google Scholar] [CrossRef] [PubMed]
- Aziz, S.; Chang, S.H. Smart-fabric sensor composed of single-walled carbon nanotubes containing binary polymer composites for health monitoring. Compos. Sci. Technol. 2018, 163, 1–9. [Google Scholar] [CrossRef]
- Yang, T.; Deng, W.; Chu, X.; Wang, X.; Hu, Y.; Fan, X.; Song, J.; Gao, Y.; Zhang, B.; Tian, G.; et al. Hierarchically Microstructure-Bioinspired Flexible Piezoresistive Bioelectronics. ACS Nano 2021, 15, 11555–11563. [Google Scholar] [CrossRef] [PubMed]
- Salavagione, H.J.; Shuttleworth, P.S.; Fernández-Blázquez, J.P.; Ellis, G.J.; Gómez-Fatou, M.A. Scalable graphene-based nanocomposite coatings for flexible and washable conductive textiles. Carbon 2020, 167, 495–503. [Google Scholar] [CrossRef]
- Chen, T.; Wu, G.; Panahi-Sarmad, M.; Wu, Y.; Xu, R.; Cao, S.; Xiao, X. A novel flexible piezoresistive sensor using superelastic fabric coated with highly durable SEBS/TPU/CB/CNF nanocomposite for detection of human motions. Compos. Sci. Technol. 2022, 227, 109563. [Google Scholar] [CrossRef]
- Qin, Z.; Chen, X.; Lv, Y.; Zhao, B.; Fang, X.; Pan, K. Wearable and high-performance piezoresistive sensor based on nanofiber/sodium algianate synergistically enhanced MXene composite aerogel. Chem. Eng. J 2023, 451, 138586. [Google Scholar] [CrossRef]
- Olivieri, F.; Rollo, G.; De Falco, F.; Avolio, R.; Bonadies, I.; Castaldo, R.; Cocca, M.; Errico, M.E.; Lavorgna, M.; Gentile, G. Reduced graphene oxide/polyurethane coatings for wash-durable wearable piezoresistive sensors. Cellulose 2023, 30, 2667–2686. [Google Scholar] [CrossRef]
- Parger, M.; Tang, C.; Xu, Y.; Twigg, C.D.; Tao, L.; Li, Y.; Wang, R.; Steinberger, M. UNOC: Understanding Occlusion for Embodied Presence in Virtual Reality. IEEE Trans. Vis. Comput. Graph. 2021, 2626, 4240–4251. [Google Scholar] [CrossRef]
- Jiang, F.; Yang, X.; Feng, L. Real-time full-body motion reconstruction and recognition for off-the-shelf VR devices. In Proceedings of the VRCAI 2016 15th ACM SIGGRAPH Conference on Virtual-Reality Continuum and Its Applications in Industry, Zhuhai, China, 3–4 December 2016; Volume 1, pp. 309–318. [Google Scholar] [CrossRef]
- Caserman, P.; Garcia-Agundez, A.; Gobel, S. A Survey of Full-Body Motion Reconstruction in Immersive Virtual Reality Applications. IEEE Trans. Vis. Comput. Graph. 2020, 26, 3089–3108. [Google Scholar] [CrossRef]
- Matheve, T.; Brumagne, S.; Demoulin, C.; Timmermans, A. Sensor-based postural feedback is more effective than conventional feedback to improve lumbopelvic movement control in patients with chronic low back pain: A randomised controlled trial. J. Neuroeng. Rehabil. 2018, 15, 85. [Google Scholar] [CrossRef] [Green Version]
- Nicolò, A.; Massaroni, C.; Passfield, L. Respiratory frequency during exercise: The neglected physiological measure. Front. Physiol. 2017, 8, 922. [Google Scholar] [CrossRef] [PubMed]
- Klüppel, M. The Role of Disorder in Filler Reinforcement of Elastomers on Various Length Scales. Adv. Polym. Sci. 2003, 164, 1–86. [Google Scholar] [CrossRef]
- Beckwith, T.G.; Buck, N.L.; Marangoni, R.D. Mechanical Measurements; Addison-Wesley Pub. Co.: Reading, MA, USA, 1982. [Google Scholar]
- Pallas-Areny, R.; Webster, J.G. Sensors and Signal Conditioning; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | SEBS (g) | CB (g) |
|---|---|---|
| SEBS/CB 3% | 1 | 0.03 |
| SEBS/CB 5% | 1 | 0.05 |
| SEBS/CB 7% | 1 | 0.07 |
| SEBS/CB 10% | 1 | 0.10 |
| SEBS/CB 15% | 1 | 0.15 |
| SEBS/CB 20% | 1 | 0.20 |
| SEBS/CB 30% | 1 | 0.30 |
| SEBS/CB 50% | 1 | 0.50 |
| SEBS/CB 70% | 1 | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamatia, T.; Matyas, J.; Olejnik, R.; Danova, R.; Maloch, J.; Skoda, D.; Slobodian, P.; Kuritka, I. Wearable and Stretchable SEBS/CB Polymer Conductive Strand as a Piezoresistive Strain Sensor. Polymers 2023, 15, 1618. https://doi.org/10.3390/polym15071618
Jamatia T, Matyas J, Olejnik R, Danova R, Maloch J, Skoda D, Slobodian P, Kuritka I. Wearable and Stretchable SEBS/CB Polymer Conductive Strand as a Piezoresistive Strain Sensor. Polymers. 2023; 15(7):1618. https://doi.org/10.3390/polym15071618
Chicago/Turabian StyleJamatia, Thaiskang, Jiri Matyas, Robert Olejnik, Romana Danova, Jaroslav Maloch, David Skoda, Petr Slobodian, and Ivo Kuritka. 2023. "Wearable and Stretchable SEBS/CB Polymer Conductive Strand as a Piezoresistive Strain Sensor" Polymers 15, no. 7: 1618. https://doi.org/10.3390/polym15071618