

Crack-Based Composite Flexible Sensor with Superhydrophobicity to Detect Strain and Vibration
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
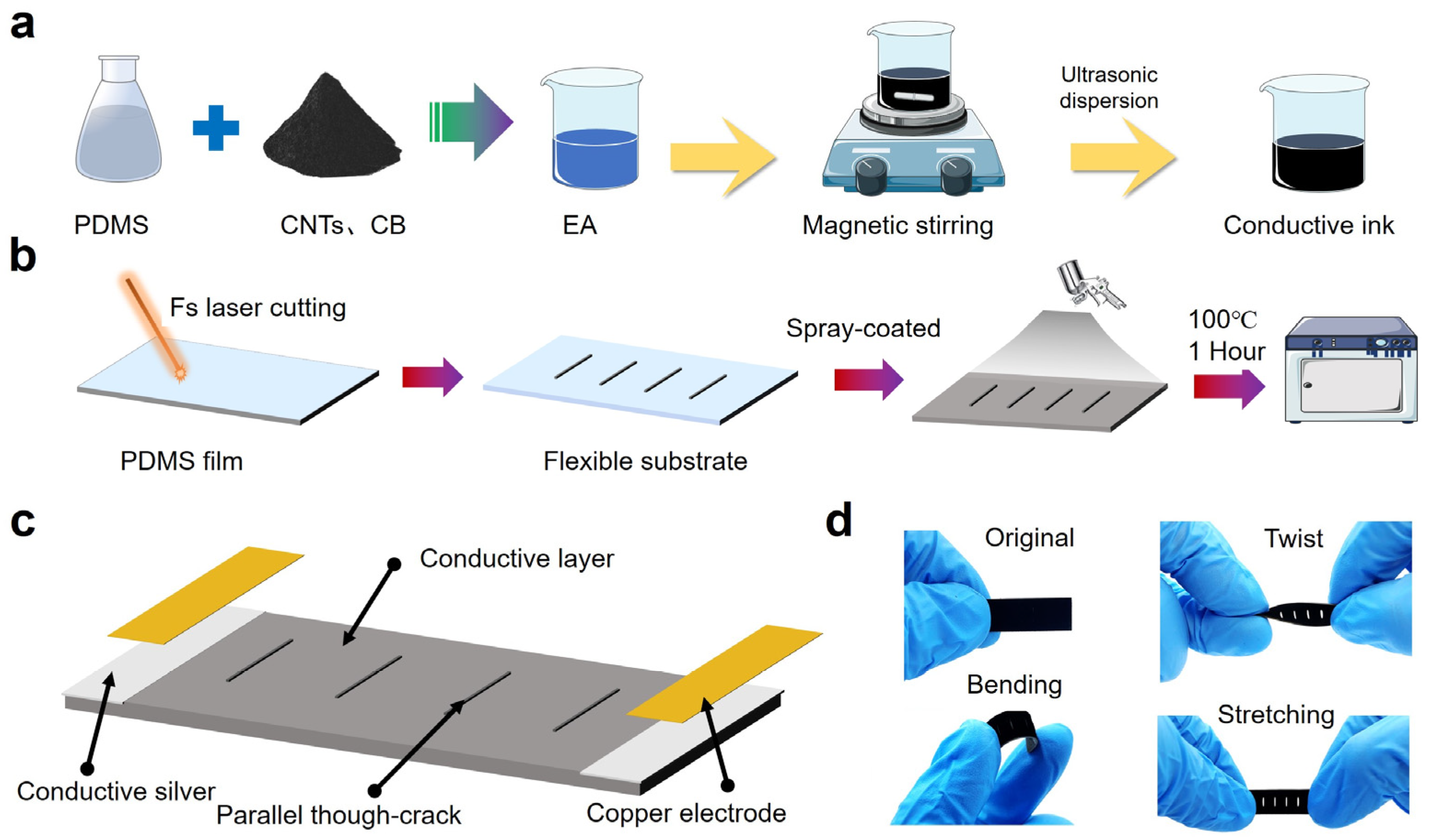
2.2. Preparation of Conductive Ink
2.3. Preparation of Vibration Sensor
2.4. Characterization
3. Results and Discussion
3.1. Design of the Crack-Based Composite Flexible Sensor
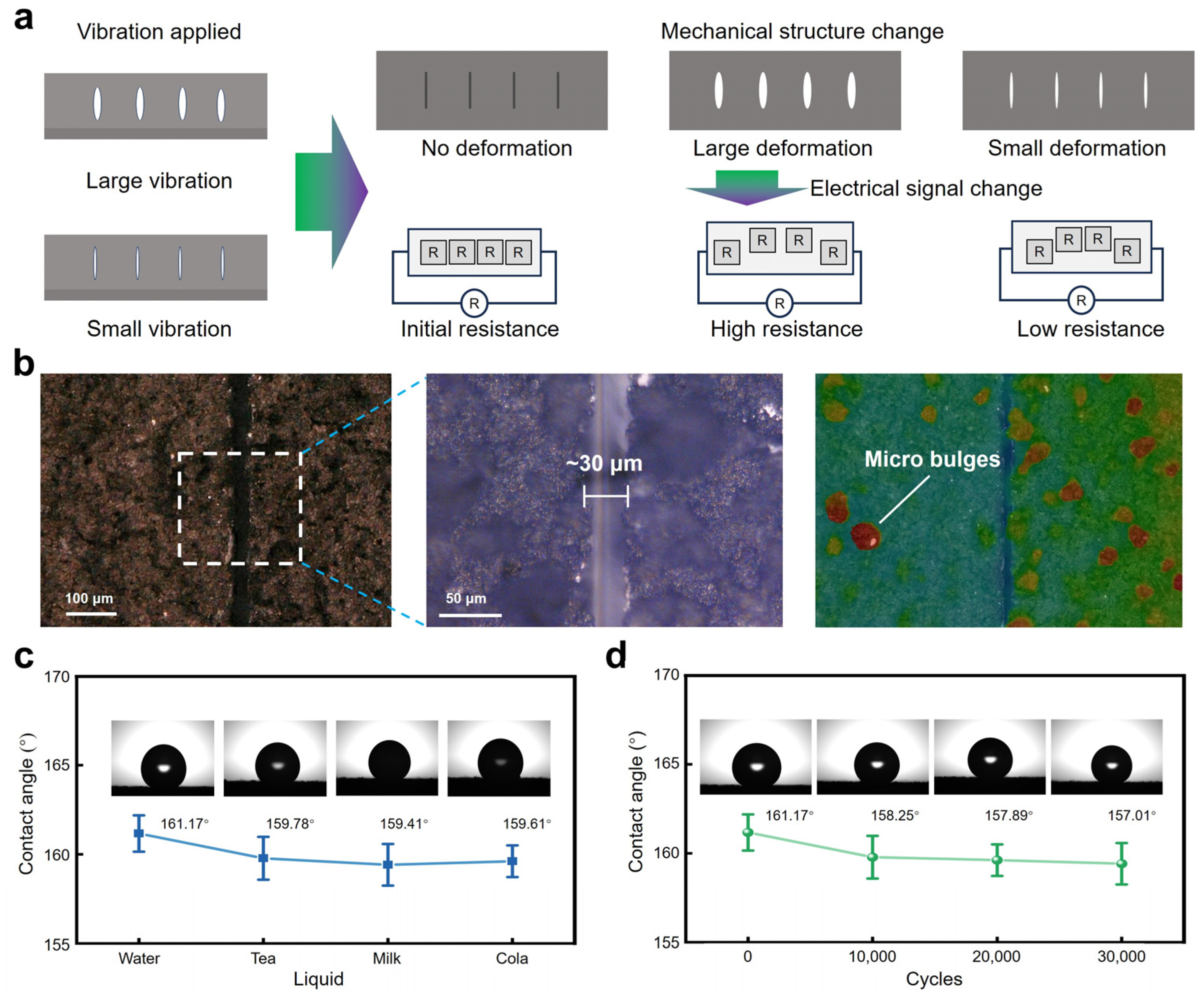
3.2. Working Mechanism of the Crack-Based Composite Flexible Sensor
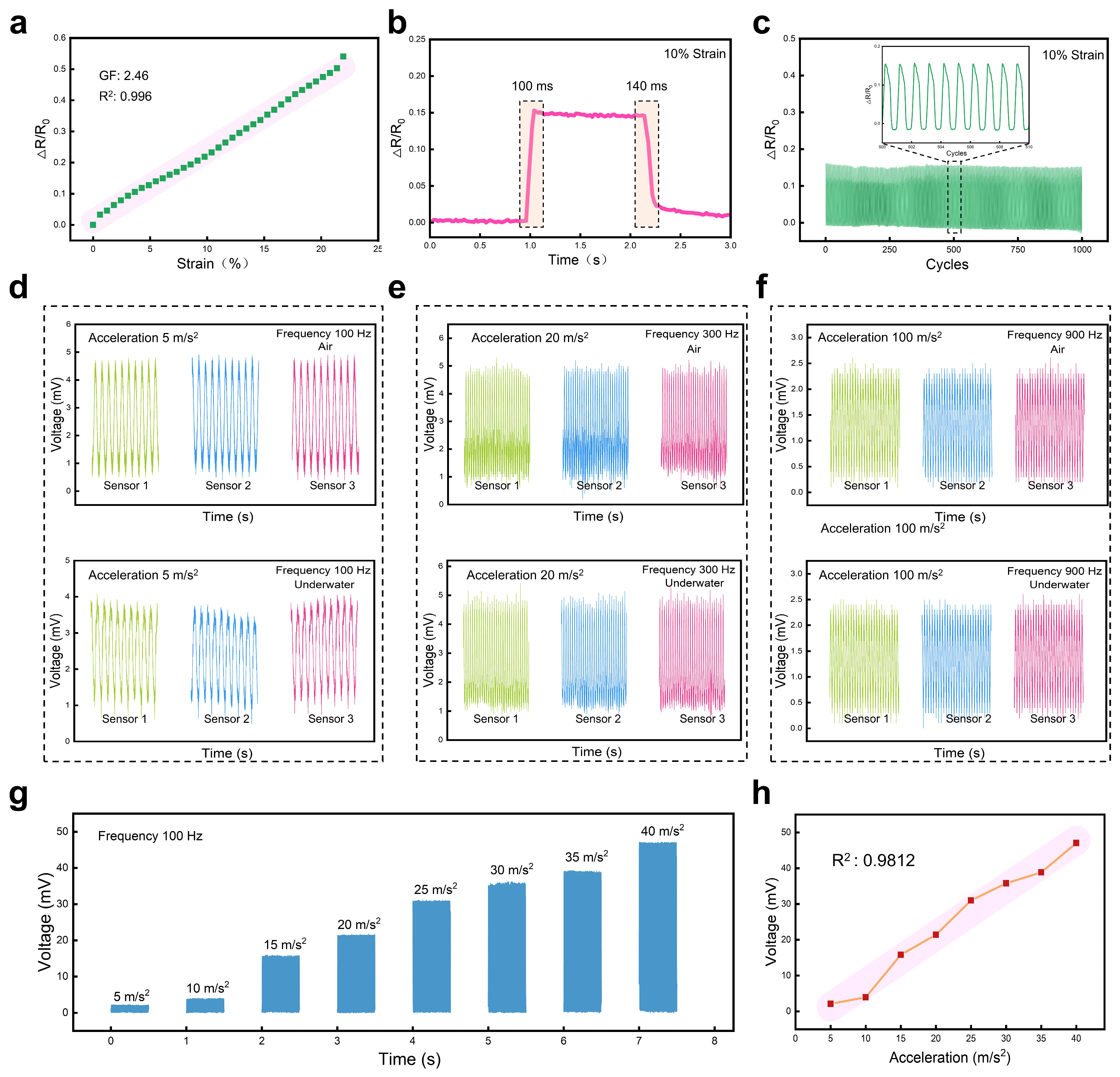
3.3. Sensing Performance of the Crack-Based Composite Flexible Sensor
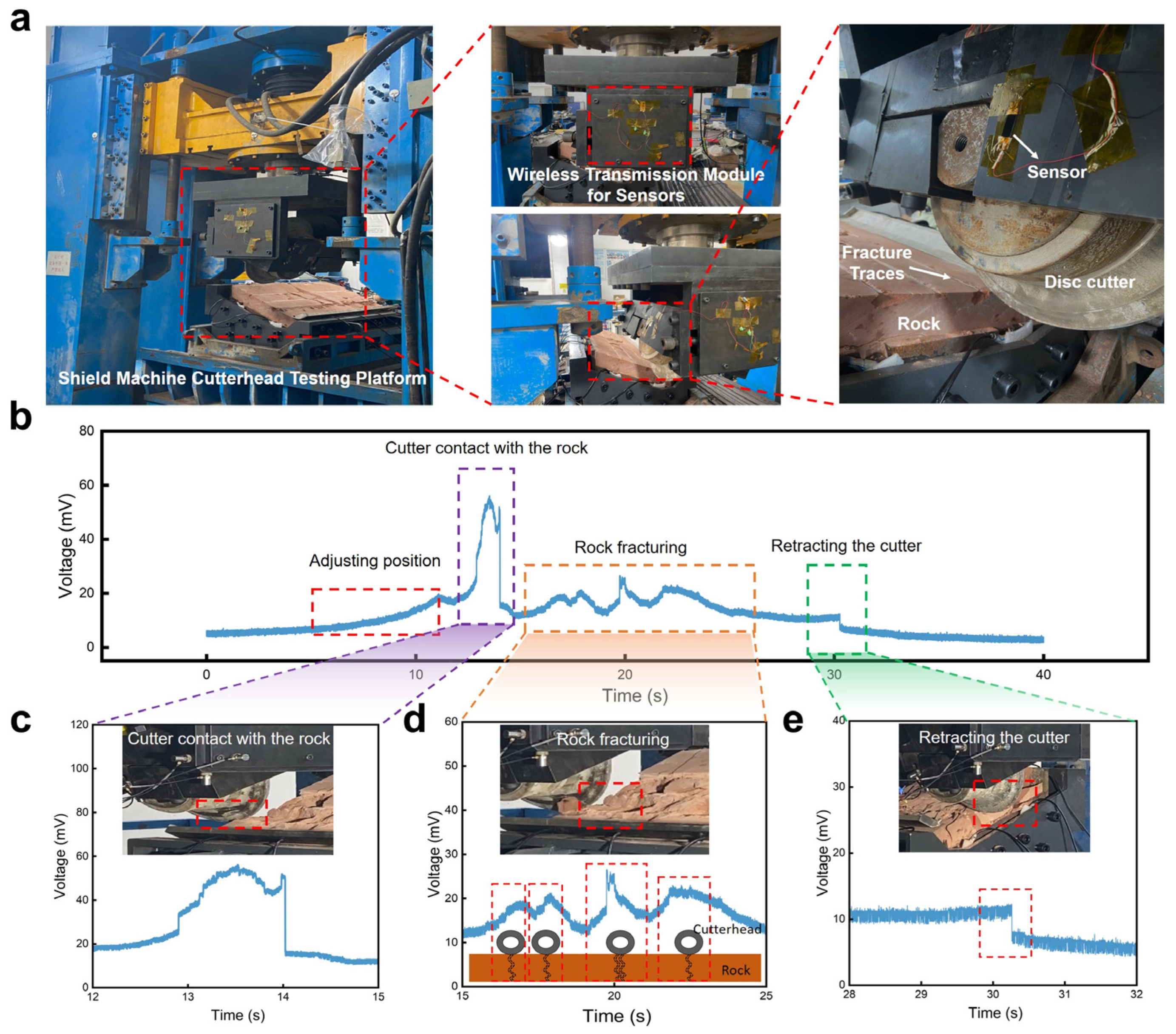
3.4. Application of the Crack-Based Composite Flexible Sensor
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zou, Y.; Sun, M.; Zhang, X.; Wang, J.; Li, F.; Dong, F.; Zhao, Z.; Du, T.; Ji, Y.; Sun, P.; et al. A Flexible, Adaptive, and Self-Powered Triboelectric Vibration Sensor with Conductive Sponge-Silicone for Machinery Condition Monitoring. Small 2024, 24, 2309759. [Google Scholar] [CrossRef]
- Elsheakh, D.N.; Fahmy, O.M.; Farouk, M.; Ezzat, K.; Eldamak, A.R. An Early Breast Cancer Detection by Using Wearable Flexible Sensors and Artificial Intelligent. IEEE Access 2024, 12, 48511–48529. [Google Scholar] [CrossRef]
- Januszko, A.; Iwan, A.; Maleczek, S.; Przybyl, W.; Pasternak, I.; Krajewska, A.; Strupinski, W. CVD-Graphene-Based Flexible, Thermoelectrochromic Sensor. J. Nanomater. 2017, 2017, 2757590. [Google Scholar] [CrossRef]
- Luo, W.; Sharma, V.; Young, D.J. A Paper-Based Flexible Tactile Sensor Array for Low-Cost Wearable Human Health Monitoring. J. Microelectromechanical Syst. 2020, 29, 825–831. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.; Jiang, Y.; He, Z.; Liu, B.; Xie, H.; Li, H.; Li, Z.; Wang, Y.; Tai, H. Toward Agricultural Ammonia Volatilization Monitoring: A Flexible Polyaniline/Ti3C2Tx Hybrid Sensitive Films Based Gas Sensor. Sens. Actuators B Chem. 2020, 316, 128144. [Google Scholar] [CrossRef]
- Liu, L.Y.; Poddar, A.K.; Rohde, U.L.; Tong, M.S. A Novel Flexible Chipless RFID Tag Sensor for Monitoring Environmental Humidity. IEEE Sens. J. 2023, 23, 31237–31249. [Google Scholar] [CrossRef]
- Meng, X.; Sun, T.; Liu, L.; Zhang, C.; Zhao, H.; Wang, D.; Zhang, J.; Niu, S.; Han, Z.; Ren, L. Flexible Equivalent Strain Sensor with Ordered Concentric Circular Curved Cracks Inspired by Scorpion. ACS Appl. Mater. Interfaces 2022, 14, 29441–29450. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Song, Y.; Sun, Y.; Zhang, X.; Hu, Y.; Guo, R.; Han, X. A Novel Ultrasound-Vibration Composite Sensor for Defects Detection of Electrical Equipment. IEEE Trans. Power Deliv. 2022, 37, 4477–4480. [Google Scholar] [CrossRef]
- Chowdhry, B.S.; Shaikh, F.K.; Ali, S.; Felemban, E. Experimental Evaluation of Vibration Response Based Bridge Damage Detection Using Wireless Sensor Networks. Wirel. Pers. Commun. 2015, 85, 499–510. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, J.; Fu, X.; Lin, Y.; Qi, Y.; Zhou, H.; Zhang, C. Broadband Vibration Energy Powered Autonomous Wireless Frequency Monitoring System Based on Triboelectric Nanogenerators. Nano Energy 2022, 98, 107209. [Google Scholar] [CrossRef]
- Xia, Y.; Sun, C.; Liu, W.; Wang, X.; Wen, K.; Feng, Z.; Zhang, G.; Fan, E.; He, Q.; Lin, Z.; et al. Ultra-Broadband Flexible Thin-Film Sensor for Sound Monitoring and Ultrasonic Diagnosis. Small 2024, 20, 202305678. [Google Scholar] [CrossRef]
- Navabian, N.; Beskhyroun, S.; Matulich, J. Development of Wireless Smart Sensor Network for Vibration-Based Structural Health Monitoring of Civil Structures. Struct. Infrastruct. Eng. 2022, 18, 345–361. [Google Scholar] [CrossRef]
- Mehamud, I.; Marklund, P.; Björling, M.; Shi, Y. Machine Condition Monitoring Enabled by Broad Range Vibration Frequency Detecting Triboelectric Nano-Generator (TENG)-Based Vibration Sensors. Nano Energy 2022, 98, 107292. [Google Scholar] [CrossRef]
- Liu, J.; Huang, H.; Zhou, Q.; Wu, C. Self-Powered Downhole Drilling Tools Vibration Sensor Based on Triboelectric Nanogenerator. IEEE Sens. J. 2022, 22, 2250–2258. [Google Scholar] [CrossRef]
- Li, S.; Qian, J.; Liu, J.; Xue, Y.; Zhang, J.; Liu, Y.; Hu, X.; Jing, X.; Zhang, W. Machine Learning-Assisted Wearable Triboelectric-Electromagnetic Vibration Sensor for Monitoring Human Rehabilitation Training. Mech. Syst. Signal Process. 2023, 201, 110679. [Google Scholar] [CrossRef]
- Wang, X.; Fu, W.; Gao, G.; Mehay, M.S.; Zheng, L.; Wang, H.; Zhao, W.; Loh, K.P.; Zhang, T.; Huang, W.; et al. Self-Cross-Linked Arrays Enabled Flexible Mechanical Sensors for Monitoring the Body Tremor. npj Flex. Electron. 2020, 4, 8. [Google Scholar] [CrossRef]
- Lin, Z.; Sun, C.; Liu, W.; Fan, E.; Zhang, G.; Tan, X.; Shen, Z.; Qiu, J.; Yang, J. A Self-Powered and High-Frequency Vibration Sensor with Layer-Powder-Layer Structure for Structural Health Monitoring. Nano Energy 2021, 90, 106366. [Google Scholar] [CrossRef]
- Gao, X.; Huang, M.; Zou, G.; Li, X.; Wang, Y. Self-Powered Vibration Sensor Based on the Coupling of Dual-Mode Triboelectric Nanogenerator and Non-Contact Electromagnetic Generator. Nano Energy 2023, 111, 108356. [Google Scholar] [CrossRef]
- Fang, Z.; Zhou, Z.; Yi, M.; Zhang, Z.; Luo, X.; Ahmed, A. A Roller-Bearing-Based Triboelectric Nanosensor for Freight Train Synergistic Maintenance in Smart Transportation. Nano Energy 2023, 106, 108089. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, C.; Li, H.; He, Z.; Zhao, X. Optical Fiber Grating Vibration Sensor for Vibration Monitoring of Hydraulic Pump. Photonic Sens. 2017, 7, 140–147. [Google Scholar] [CrossRef]
- Li, C.; Xue, Y.; Jia, P.; Jia, M.; Sun, B.; Xiong, J. A Wireless Passive Vibration Sensor Based on High-Temperature Ceramic for Harsh Environment. J. Sens. 2021, 2021, 8875907. [Google Scholar] [CrossRef]
- Huang, Y.; Tang, F.; Ma, D.; Liu, Z.; Wang, X. Design, Fabrication, Characterization, and Application of an Ultra-High Temperature 6H-SiC Sapphire Fiber Optic Vibration Sensor. IEEE Photonics J. 2019, 11, 1–12. [Google Scholar] [CrossRef]
- Yang, X.; Gui, J.; Dong, C.; Zhao, J.; Xu, R. Laser-Induced Graphene for Screen-Printed Strain Sensors. ACS Appl. Nano Mater. 2023, 6, 21679–21687. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, J.; Sui, Q.; Ye, Q. Low-Cost Plate-Type MOEMS Uniaxial Vibration Sensor Based on Metal Etching and Fiber Collimator Technique. IEEE Sens. J. 2016, 16, 4816–4821. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Deng, W.; Jin, L.; Chun, F.; Pan, H.; Gu, B.; Zhang, H.; Lv, Z.; Yang, W.; et al. Self-Powered Acceleration Sensor Based on Liquid Metal Triboelectric Nanogenerator for Vibration Monitoring. ACS Nano 2017, 11, 7440–7446. [Google Scholar] [CrossRef]
- Alvarez Rueda, A.; Petritz, A.; Schäffner, P.; Postl, M.; Adler, M.; Belegratis, M.; Groten, J.; Stadlober, B. Vibration Energy Harvesting with Printed P(VDF:TrFE) Transducers to Power Condition Monitoring Sensors for Industrial and Manufacturing Equipment. Adv. Eng. Mater. 2024, 26, 2302140. [Google Scholar] [CrossRef]
- Wang, D.; Zhou, X.; Song, R.; Fang, C.; Wang, Z.; Wang, C.; Huang, Y. Freestanding Silver/Polypyrrole Composite Film for Multifunctional Sensor with Biomimetic Micropattern for Physiological Signals Monitoring. Chem. Eng. J. 2021, 404, 126940. [Google Scholar] [CrossRef]
- Miao, J.; Shi, Y.; Zhu, H.; Gao, M. Flexible Broad-Range Pressure Sensors Enabled by Deformation-Induced Conductive Channels in 3D Graphene Foam@Polydimethylsiloxane Composite for Precise Vibrational Signal Detection. Chin. J. Chem. 2020, 38, 719–724. [Google Scholar] [CrossRef]
- Zhang, D.; Xie, J.; Meng, X.; Pang, H.; Sun, R.; Fan, H.; Nan, X.; Zhou, Z. Development of Piezoresistive Flexible Sensor with Dual-Height Cylindrical Microstructure Surfaces to Achieve Vehicle Vibration Monitoring. J. Micromech. Microeng. 2024, 34, 075005. [Google Scholar] [CrossRef]
- Ding, Y.-R.; Xue, C.-H.; Guo, X.-J.; Wang, X.; Jia, S.-T.; An, Q.-F. Fabrication of TPE/CNTs Film at Air/Water Interface for Flexible and Superhydrophobic Wearable Sensors. Chem. Eng. J. 2021, 409, 128199. [Google Scholar] [CrossRef]
- Huang, J.; Yang, X.; Liu, J.; Her, S.; Guo, J.; Gu, J.; Guan, L. Vibration Monitoring Based on Flexible Multi-Walled Carbon Nanotube/Polydimethylsiloxane Film Sensor and the Application on Motion Signal Acquisition. Nanotechnology 2020, 31, 335504. [Google Scholar] [CrossRef]
- Zhao, Y.; Gao, S.; Zhang, X.; Huo, W.; Xu, H.; Chen, C.; Li, J.; Xu, K.; Huang, X. Fully Flexible Electromagnetic Vibration Sensors with Annular Field Confinement Origami Magnetic Membranes. Adv. Funct. Mater. 2020, 30, 202001553. [Google Scholar] [CrossRef]
- Luo, Y.; Xiao, Y.; Liu, J.; Wu, Y.; Zhao, Z. Design and Application of a Flexible Nano Cardiac Sound Sensor Based on P(VDF-TrFE)/KNN/GR Composite Piezoelectric Film for Heart Disease Diagnosis. Nanotechnology 2024, 35, 075502. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Jiang, C.; Dong, T.; Liu, X.; Chen, P.; Yu, X.; Yue, L.; Wang, Z. Flexible Micro-Nano Fiber Sensors for Tactile Sensing. IEEE Sens. J. 2024, 24, 4458–4463. [Google Scholar] [CrossRef]
- Lin, H.; Liu, D.; Zhou, Y.; Liu, M.; Huang, C.; Fu, Q.; Deng, K.; Huang, Y.; Huang, X.; Zhang, P.; et al. A Flexible PTI-CNT Strain Sensor with High Stretchable and Sensitive for Human Movement and Vocal Cord Vibration Monitoring. Polymer 2024, 299, 126887. [Google Scholar] [CrossRef]
- Liu, Y.F.; Liu, Q.; Li, Y.Q.; Huang, P.; Yao, J.Y.; Hu, N.; Fu, S.Y. Spider-Inspired Ultrasensitive Flexible Vibration Sensor for Multifunctional Sensing. ACS Appl. Mater. Interfaces 2020, 12, 30871–30881. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Z.; Wu, N.; Yang, W.; Xu, H.; Liao, Y.; Li, C.; Luković, M.; Yang, Y.; Zhao, S.; Su, Z.; et al. Sustainable-Macromolecule-Assisted Preparation of Cross-linked, Ultralight, Flexible Graphene Aerogel Sensors toward Low-Frequency Strain/Pressure to High-Frequency Vibration Sensing. Small 2022, 18, 202202047. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Wang, L.; Wang, D.; Yang, H.; Guo, M.; Ye, Z.; Tong, X. A Preliminary Study on the IoT-Based Pavement Monitoring Platform Based on the Piezoelectric-Cantilever-Beam Powered Sensor. Adv. Mater. Sci. Eng. 2017, 2017, 4576026. [Google Scholar] [CrossRef]
- Suo, J.; Yang, X.; Leung, Y.; Wang, J.; Chen, M.; Liu, Y.; Sun, H.; Wang, Z.; Qiao, X.; Li, W.J. Enabling Natural Human-Computer Interaction through AI-Powered Nanocomposite IoT Throat Vibration Sensor. IEEE Internet Things J. 2024, 11, 24761–24774. [Google Scholar] [CrossRef]
- Won, J.; Park, J.; Park, J.-W.; Kim, I. BLESeis: Low-Cost IoT Sensor for Smart Earthquake Detection and Notification. Sensors 2020, 20, 2963. [Google Scholar] [CrossRef]
- Kim, T.-H.; Moeinnia, H.; Kim, W.S. 3D Printed Vorticella-Kirigami Inspired Sensors for Structural Health Monitoring in Internet-of-Things. Mater. Des. 2023, 234, 112332. [Google Scholar] [CrossRef]
- Wang, Q.; Yao, Z.; Zhang, C.; Song, H.; Ding, H.; Li, B.; Niu, S.; Huang, X.; Chen, C.; Han, Z.; et al. A Selective-Response Hypersensitive Bio-Inspired Strain Sensor Enabled by Hysteresis Effect and Parallel Through-Slits Structures. Nano-Micro Lett. 2024, 16, 26. [Google Scholar] [CrossRef] [PubMed]
- Dinh Le, T.-S.; An, J.; Huang, Y.; Vo, Q.; Boonruangkan, J.; Tran, T.; Kim, S.-W.; Sun, G.; Kim, Y.-J. Ultrasensitive Anti-Interference Voice Recognition by Bio-Inspired Skin-Attachable Self-Cleaning Acoustic Sensors. ACS Nano 2019, 13, 13293–13303. [Google Scholar] [CrossRef]
- Zhu, K.; Yang, S.; Jiang, H.; He, Y.; Chen, Z.; Zhang, B.; Zhang, Q.; Zhang, H. A Robust Biomass Superhydrophobic Sensor for Re-Healing and Underwater Vibration Detection. Carbon. 2024, 218, 118770. [Google Scholar] [CrossRef]
- Xu, R.; Zhang, K.; Xu, X.; He, M.; Lu, F.; Su, B. Superhydrophobic WS 2-Nanosheet-Wrapped Sponges for Underwater Detection of Tiny Vibration. Adv. Sci. 2018, 5, 201700655. [Google Scholar] [CrossRef]
- Duan, C.; Han, L.; Yang, G.; Schubert, D.W.; Zhang, T. Multi-Functional PDMS/MMT Coating on Magnesium Substrates: Hydrophobicity, Durability, and EMI Shielding. Mater. Today Commun. 2024, 39, 108603. [Google Scholar] [CrossRef]
- Rehman, M.A.; Hanif, M.; Umar, M.; Furqan, M.Q.; Younas, M.; Mehmood, U. Development of Polydimethylsiloxane (PDMS)-Based Hydrophobic Coating for Self-Clean Solar Panels. Arab. J. Sci. Eng. 2024, 49, 8079–8086. [Google Scholar] [CrossRef]
- Qi, X.; Li, X.; Jo, H.; Sideeq Bhat, K.; Kim, S.; An, J.; Kang, J.-W.; Lim, S. Mulberry Paper-Based Graphene Strain Sensor for Wearable Electronics with High Mechanical Strength. Sens. Actuators A Phys. 2020, 301, 111697. [Google Scholar] [CrossRef]
- Bhatta, T.; Pradhan, G.B.; Shrestha, K.; Jeong, S.H.; Zhang, S.; Kim, H.S.; Park, J.Y. All Elastomeric Pillars-Based Triboelectric Vibration Sensor for Self-Powered Broad Range Machinery Condition Monitoring. Nano Energy 2023, 117, 108929. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, H.; Chen, H.; Lee, J.-H.; Guo, F.; Shen, X.; Zheng, Q.; Kim, J.-K. Wrinkled, Cracked and Bridged Carbon Networks for Highly Sensitive and Stretchable Strain Sensors. Compos. Part A Appl. Sci. Manuf. 2022, 163, 107221. [Google Scholar] [CrossRef]
- Liao, X.; Zhang, Z.; Liao, Q.; Liang, Q.; Ou, Y.; Xu, M.; Li, M.; Zhang, G.; Zhang, Y. Flexible and Printable Paper-Based Strain Sensors for Wearable and Large-Area Green Electronics. Nanoscale 2016, 8, 13025–13032. [Google Scholar] [CrossRef] [PubMed]
- Yao, D.-J.; Tang, Z.; Zhang, L.; Liu, Z.-G.; Sun, Q.-J.; Hu, S.-C.; Liu, Q.-X.; Tang, X.-G.; Ouyang, J. A Highly Sensitive, Foldable and Wearable Pressure Sensor Based on MXene-Coated Airlaid Paper for Electronic Skin. J. Mater. Chem. C 2021, 9, 12642–12649. [Google Scholar] [CrossRef]
- Hasnain, M.; Ullah, Z.; Sonil, N.I.; Ahmad, W.; Khalil, A.; Ali, S.M.; Mustafa, G.M.; Nazar, M.F.; Rouf, S.A.; Shamain, N.; et al. Ultrasensitive Strain Sensor Based on Graphite Coated Fibrous Frameworks for Security Applications. Mater. Today Commun. 2023, 37, 106859. [Google Scholar] [CrossRef]
- Zhou, J.; Long, X.; Huang, J.; Jiang, C.; Zhuo, F.; Guo, C.; Li, H.; Fu, Y.; Duan, H. Multiscale and Hierarchical Wrinkle Enhanced Graphene/Ecoflex Sensors Integrated with Human-Machine Interfaces and Cloud-Platform. NPJ Flex. Electron. 2022, 6, 55. [Google Scholar] [CrossRef] [PubMed]
- Bu, Y.; Shen, T.; Yang, W.; Yang, S.; Zhao, Y.; Liu, H.; Zheng, Y.; Liu, C.; Shen, C. Ultrasensitive Strain Sensor Based on Superhydrophobic Microcracked Conductive Ti3C2Tx MXene/Paper for Human-Motion Monitoring and E-Skin. Sci. Bull. 2021, 66, 1849–1857. [Google Scholar] [CrossRef]
- Liu, L.; Niu, S.; Zhang, J.; Mu, Z.; Li, J.; Li, B.; Meng, X.; Zhang, C.; Wang, Y.; Hou, T.; et al. Bioinspired, Omnidirectional, and Hypersensitive Flexible Strain Sensors. Adv. Mater. 2022, 34, 202200823. [Google Scholar] [CrossRef]
- Xia, J.; He, L.; Lu, Z.; Song, J.; Wang, Q.; Liu, L.; Tian, Y. High Performance Strain Sensor Based on Carbon Black/Graphene/Ecoflex for Human Health Monitoring and Vibration Signal Detection. ACS Appl. Nano Mater. 2023, 6, 19279–19289. [Google Scholar] [CrossRef]
- Tang, L.; Wu, S.; Qu, J.; Gong, L.; Tang, J. A Review of Conductive Hydrogel Used in Flexible Strain Sensor. Materials 2020, 13, 3947. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wu, H.; Liu, L.; Yang, Y.; Zhang, C.; Duan, J. Crack-Based Composite Flexible Sensor with Superhydrophobicity to Detect Strain and Vibration. Polymers 2024, 16, 2535. https://doi.org/10.3390/polym16172535
Zhang Y, Wu H, Liu L, Yang Y, Zhang C, Duan J. Crack-Based Composite Flexible Sensor with Superhydrophobicity to Detect Strain and Vibration. Polymers. 2024; 16(17):2535. https://doi.org/10.3390/polym16172535
Chicago/Turabian StyleZhang, Yazhou, Huansheng Wu, Linpeng Liu, Yang Yang, Changchao Zhang, and Ji’an Duan. 2024. "Crack-Based Composite Flexible Sensor with Superhydrophobicity to Detect Strain and Vibration" Polymers 16, no. 17: 2535. https://doi.org/10.3390/polym16172535