
Stretchable and Wearable Sensors for Contact Touch and Gesture Recognition Based on Poling-Free Piezoelectric Polyester Elastomer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Section
2.1. Materials
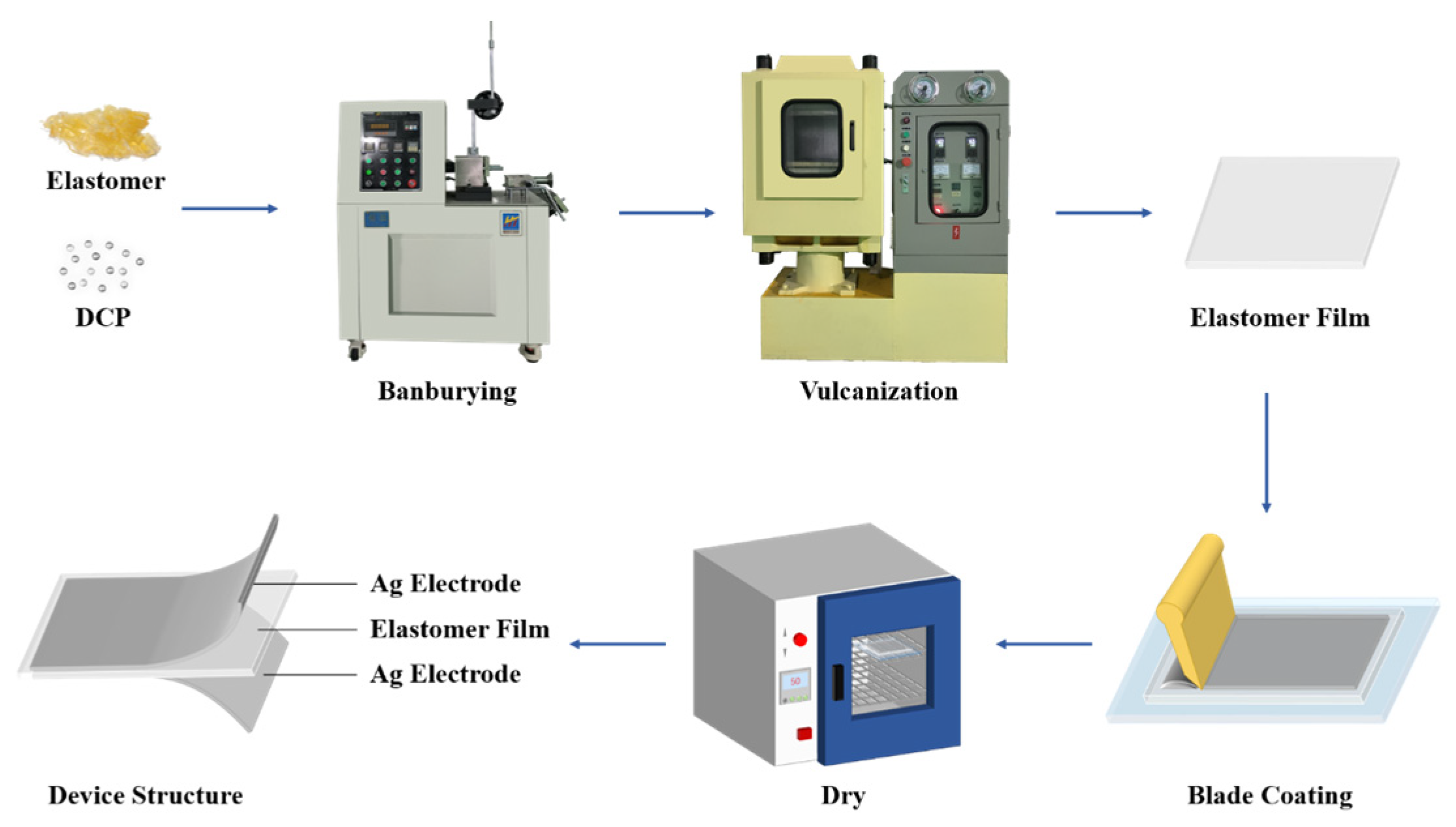
2.2. Methods
2.3. Characterization
3. Results and Discussions
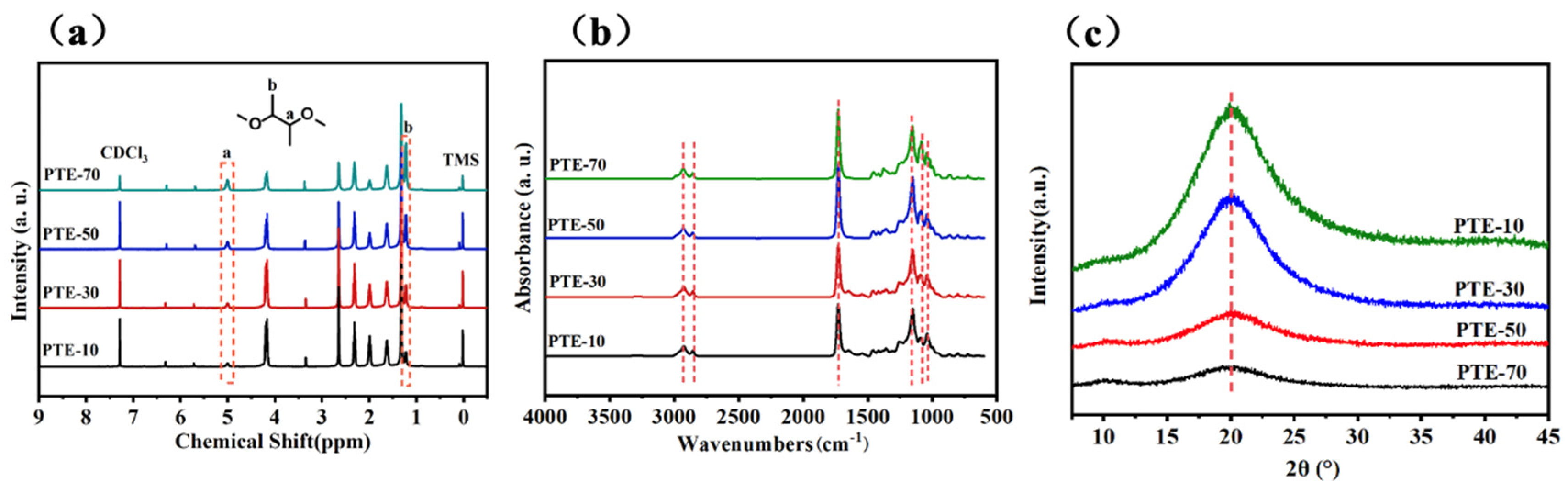
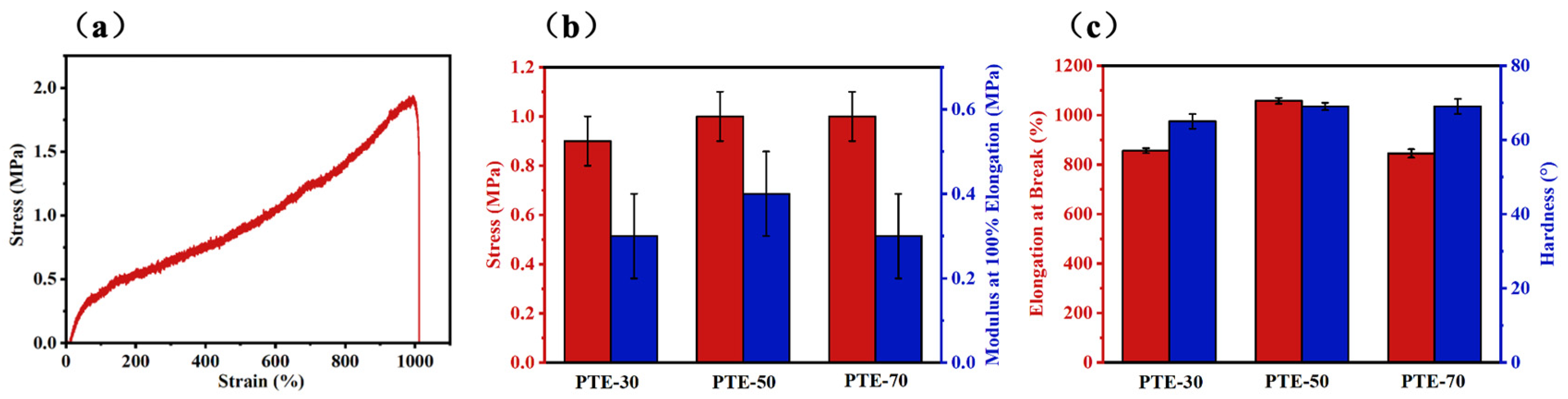
3.1. Material Characterization
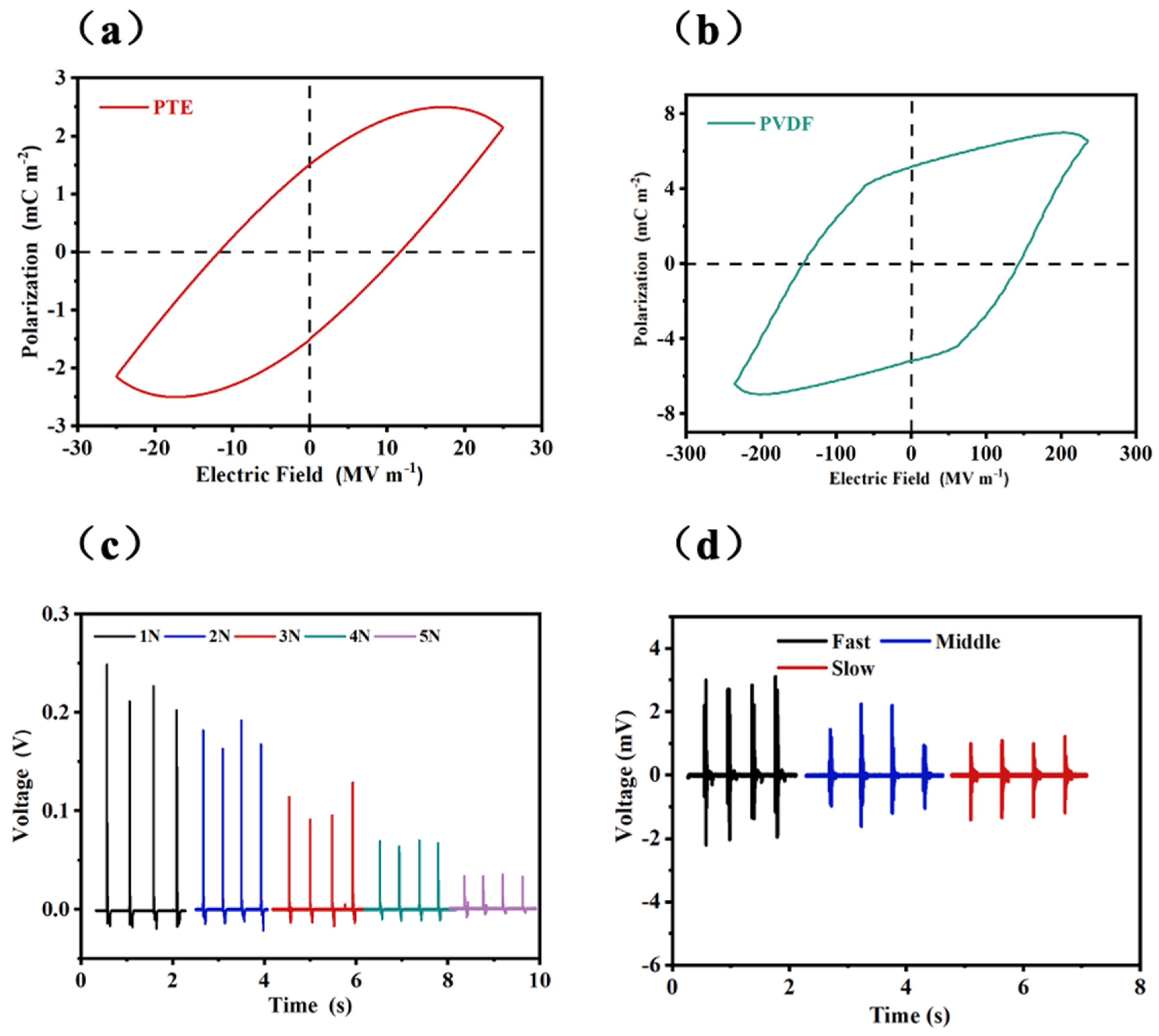
3.2. Sensor Characterization
3.3. Contact and Contactless Response Performances
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, B.; Wu, H.; Zhang, Z.; Lian, Z.; Zhang, X.; Du, G. SRDST: Effective Dynamic Gesture Recognition With Sparse Representation and Dual-Stream Transformers in mmWave Radar. IEEE Trans. Ind. Inform. 2025, 21, 604–612. [Google Scholar] [CrossRef]
- Chou, C.-M.; Shen, T.-C.; Shen, T.-C.; Shen, C.-H. Influencing factors on students’ learning effectiveness of AI-based technology application: Mediation variable of the human-computer interaction experience. Educ. Inf. Technol. 2022, 27, 8723–8750. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Y.; Cheng, Y.; Liu, H.; Fu, S.; Jin, K.; Li, D.; Fu, Z.; Han, Y.; Wang, Y.; et al. Aloe Inspired Special Structure Hydrogel Pressure Sensor for Real-Time Human-Computer Interaction and Muscle Rehabilitation System. Adv. Funct. Mater. 2023, 33, 2308175. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y. Design of Human-Machine Integration System to Meet Diverse Interactive Tasks. Int. J. Hum. Comput. Interact. 2024, 1–14. [Google Scholar] [CrossRef]
- Niu, Y.-F.; Chen, R.; Wang, Y.-Y.; Yao, X.-Y.; Feng, Y. Research on click enhancement strategy of hand-eye dual-channel human-computer interaction system: Trade-off between sensing area and area cursor. Adv. Eng. Inform. 2024, 62, 102880. [Google Scholar] [CrossRef]
- Tan, P.; Han, X.; Zou, Y.; Qu, X.; Xue, J.; Li, T.; Wang, Y.; Luo, R.; Cui, X.; Xi, Y.; et al. Self-Powered Gesture Recognition Wristband Enabled by Machine Learning for Full Keyboard and Multicommand Input. Adv. Mater. 2022, 34, 2200793. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, X.; Jiang, Y.; Chang, S.; Wang, X. Secure Voice Interactions With Smart Devices. IEEE Trans. Mob. Comput. 2023, 22, 515–526. [Google Scholar] [CrossRef]
- Proix, T.; Saa, J.D.; Christen, A.; Martin, S.; Pasley, B.N.; Knight, R.T.; Tian, X.; Poeppel, D.; Doyle, W.K.; Devinsky, O.; et al. Imagined speech can be decoded from low- and cross-frequency intracranial EEG features. Nat. Commun. 2022, 13, 48. [Google Scholar] [CrossRef]
- Pyun, K.R.; Kwon, K.; Yoo, M.J.; Kim, K.K.; Gong, D.; Yeo, W.-H.; Han, S.; Ko, S.H. Machine-learned wearable sensors for real-time hand-motion recognition: Toward practical applications. Natl. Sci. Rev. 2024, 11, nwad298. [Google Scholar] [CrossRef]
- Zhou, H.; Tawk, C.; Alici, G. A Multipurpose Human–Machine Interface via 3D-Printed Pressure-Based Force Myography. IEEE Trans. Industr. Inform. 2024, 20, 8838–8849. [Google Scholar] [CrossRef]
- León, D.G.; Gröli, J.; Yeduri, S.R.; Rossier, D.; Mosqueron, R.; Pandey, O.J.; Cenkeramaddi, L.R. Video Hand Gestures Recognition Using Depth Camera and Lightweight CNN. IEEE Sens. J. 2022, 22, 14610–14619. [Google Scholar] [CrossRef]
- Quan, P.; Mao, Z.; Chen, N.; Zhang, Y.; Zhang, K.; Pan, Z. Attentive Fusion for Efficient Wrist-Worn Gesture Recognition Based on Dual-View Cameras. IEEE Sens. J. 2025, 25, 2008–2018. [Google Scholar] [CrossRef]
- Bamani, E.; Nissinman, E.; Meir, I.; Koenigsberg, L.A. Sintov, Ultra-Range Gesture Recognition using a web-camera in Human–Robot Interaction. Eng. Appl. Artif. Intell. 2024, 132, 108443. [Google Scholar] [CrossRef]
- Qi, J.; Ma, L.; Cui, Z.; Yu, Y. Computer vision-based hand gesture recognition for human-robot interaction: A review. Complex Intell. Syst. 2024, 10, 1581–1606. [Google Scholar] [CrossRef]
- Wang, J.; Pan, X.; Zhao, Z.; Xie, Y.; Luo, W.; Xie, Q.; Zeng, H.; Shuai, Y.; Song, Z.; Wu, C.; et al. An Infrared Near-Sensor Reservoir Computing System Based on Large-Dynamic-Space Memristor with Tens of Thousands of States for Dynamic Gesture Perception. Adv. Sci. 2024, 11, 2307359. [Google Scholar] [CrossRef]
- Chen, J.; Chen, D.; Jiang, H.; Miao, X.; Yin, C. Skeleton-based 3D human pose estimation with low-resolution infrared array sensor using attention based CNN-BiGRU. Int. J. Mach. Learn. Cybern. 2024, 15, 2049–2062. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, A.; Dong, Z.; Sun, Y.; Zhang, J.; Liu, L.; Ma, H.; Liu, J.; Yang, N. M-Gesture: Person-Independent Real-Time In-Air Gesture Recognition Using Commodity Millimeter Wave Radar. IEEE Internet Things J. 2022, 9, 3397–3415. [Google Scholar] [CrossRef]
- Bhadwal, N.; Ben Mrad, R.; Behdinan, K. Review of Piezoelectric Properties and Power Output of PVDF and Copolymer-Based Piezoelectric Nanogenerators. Nanomaterials 2023, 13, 3170. [Google Scholar] [CrossRef]
- del Bosque, A.; Sánchez-Romate, X.F.; Sánchez, M.; Ureña, A. Ultrasensitive and highly stretchable sensors for human motion monitoring made of graphene reinforced polydimethylsiloxane: Electromechanical and complex impedance sensing performance. Carbon 2022, 192, 234–248. [Google Scholar] [CrossRef]
- Marchiori, B.; Regal, S.; Arango, Y.; Delattre, R.; Blayac, S.; Ramuz, M. PVDF-TrFE-based stretchable contact and non-contact temperature sensor for E-skin application. Sensors 2020, 20, 623. [Google Scholar] [CrossRef]
- Pullano, S.A.; Mahbub, I.; Islam, S.K.; Fiorillo, A.S. PVDF sensor stimulated by infrared radiation for temperature monitoring in microfluidic devices. Sensors 2017, 17, 850. [Google Scholar] [CrossRef] [PubMed]
- Guan, Y.; Tu, L.; Ren, K.; Kang, X.; Tian, Y.; Deng, W.; Yu, P.; Ning, C.; Fu, R.; Tan, G.; et al. Soft, Super-Elastic, All-Polymer Piezoelectric Elastomer for Artificial Electronic Skin. ACS Appl. Mater. Interfaces 2022, 15, 1736–1747. [Google Scholar] [CrossRef]
- Li, L.; Pan, J.; Chang, L.; Liu, Z.; Wu, G.; Hu, Y. A MXene heterostructure-based piezoionic sensor for wearable sensing applications. Chem. Eng. J. 2024, 482, 148988. [Google Scholar] [CrossRef]
- Wang, F.; Yang, P.; Liu, W.; Li, Z.; Wang, Z.; Xiang, Y.; Zhang, Q.; Hu, X. Simultaneous Visualization of Dynamical and Static Tactile Perception Using Piezoelectric-Ultrasonic Bimodal Electronic Skin Based on In Situ Polarized PVDF-TrFE/2DBP Composites and the TFT Array. ACS Appl. Mater. Interfaces 2025, 17, 16057–16071. [Google Scholar] [CrossRef] [PubMed]
- Fu, R.; Tu, L.; Guan, Y.; Wang, Z.; Deng, C.; Yu, P.; Tan, G.; Ning, C.; Zhou, L. Intrinsically piezoelectric elastomer based on crosslinked polyacrylonitrile for soft electronics. Nano Energy 2022, 103 Pt A, 107784. [Google Scholar] [CrossRef]
- Xu, R.; Luo, F.; Zhu, Z.; Li, M.; Chen, B. Flexible Wide-Range Triboelectric Sensor for Physiological Signal Monitoring and Human Motion Recognition. ACS Appl. Electron. Mater. 2022, 4, 4051–4060. [Google Scholar] [CrossRef]
- Hong, K.; Hao, Y.; Yang, J.; Yang, J.; Su, J.; Su, W.; Zhang, H.; Qin, Y.; Zhang, C.; Li, X. Sodium–Alginate Composite Nanofiber-Based Triboelectric Sensor for Self-Powered Wrist Posture Identification. ACS Appl. Electron. Mater. 2024, 6, 9071–9081. [Google Scholar] [CrossRef]
- Yu, J.; Chen, L.; Hou, X.; Mu, J.; He, J.; Geng, W.; Qiao, X.; Chou, X. Stretchable and skin-conformal piezo-triboelectric pressure sensor for human joint bending motion monitoring-ScienceDirect. J. Mater. 2022, 8, 247–256. [Google Scholar]
- Yang, T.; Pan, H.; Tian, G.; Zhang, B.; Xiong, D.; Gao, Y.; Yan, C.; Chu, X.; Chen, N.; Zhong, S.; et al. Hierarchically Structured PVDF/ZnO Core-shell Nanofibers for Self-powered Physiological Monitoring Electronics. Nano Energy 2020, 72, 104706. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Zhang, W.; Zhang, Q.; Hu, X. Stretchable and Wearable Sensors for Contact Touch and Gesture Recognition Based on Poling-Free Piezoelectric Polyester Elastomer. Polymers 2025, 17, 1105. https://doi.org/10.3390/polym17081105
Wu K, Zhang W, Zhang Q, Hu X. Stretchable and Wearable Sensors for Contact Touch and Gesture Recognition Based on Poling-Free Piezoelectric Polyester Elastomer. Polymers. 2025; 17(8):1105. https://doi.org/10.3390/polym17081105
Chicago/Turabian StyleWu, Kaituo, Wanli Zhang, Qian Zhang, and Xiaoran Hu. 2025. "Stretchable and Wearable Sensors for Contact Touch and Gesture Recognition Based on Poling-Free Piezoelectric Polyester Elastomer" Polymers 17, no. 8: 1105. https://doi.org/10.3390/polym17081105
APA StyleWu, K., Zhang, W., Zhang, Q., & Hu, X. (2025). Stretchable and Wearable Sensors for Contact Touch and Gesture Recognition Based on Poling-Free Piezoelectric Polyester Elastomer. Polymers, 17(8), 1105. https://doi.org/10.3390/polym17081105