Smart Palm: An IoT Framework for Red Palm Weevil Early Detection

 , and
, and
Abstract
:1. Introduction
2. Related Works
3. Smart Palm Architecture
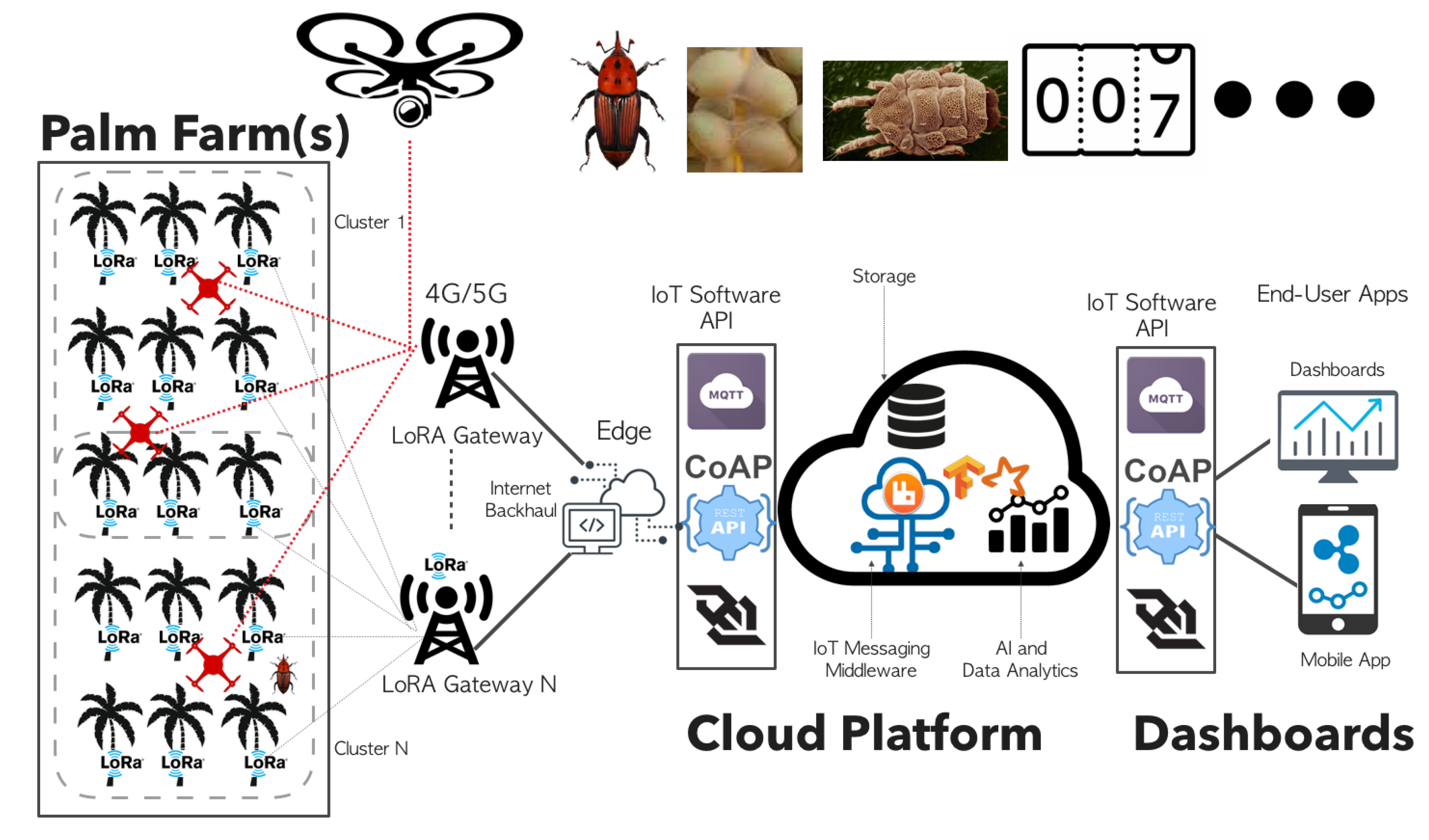
3.1. General System Architecture
- The Palm Farm Layer: This layer is the data source layer that contains all the palms distributed in multiple farms. Every palm is equipped with a sensor that captures vital information of the palm, including temperature, humidity, PH level, in addition to weevil detection sensors, namely a sound sensor (i.e., microphone) and a vibration sensor. This information is sent periodically from the sensor node to the cloud system through the gateway. The sensor nodes are equipped with a LoRA shield to allow very long-range communication with the gateway. Several studies show that LoRA achieves distances up to 20 km, but with low data rates. In the smart palm application, the data rate is very small as data contain small number of bits and will be sent after long periods of time. As a farm can be very large, it may be decomposed into several clusters of palms, where every cluster connects to one particular LoRA gateway. In fact, a LoRA gateway can handle a limited number of connections, thus, it is necessary to have multiple clusters for farms of very large sizes. The configuration of the number of clusters per farm is a design choice.
- The LoRA Gateway Layer: this layer is the collection point of the data coming from different palms. Given that the LoRA communication range is very large, the gateway will collect data from many nodes, and then forwards them to the next Edge layer. The gateway is just a simple forwarder of messages. It does not perform any kind of processing on the data. It receives the palm vital data from its LoRA interface and forwards it to the edge through its IP Interface. Usually, both Ethernet and WiFi can be used to transmit data to the IP network.
- The Edge Layer: Data coming from palms should be transmitted to the cloud. However, as the number of palms increases, which can reach millions of palms, sending all data collected from palms directly to the cloud leads to higher storage requirements at the cloud, in addition to a higher computation complexity. This approach would lead to high management costs at the cloud in addition to possible degradation of the quality of service due to increased latency. To overcome this problem, we use an edge layer, which is an intermediate layer between the farm system and the cloud, and the edge will be responsible for a subset of data, will do local processing and send only a digest to the cloud through aggregation, thus reducing the load on the cloud and improving the QoS through reduced latency as it is closer to the devices. Edge are typically distributed in nature, and they are in a region close to where the data is originated from. This solution is more scalable and more energy efficient from the cloud perspective. An edge can be a local server or machine specific to a region or a city. For small systems, the edge layer can be ignored.
- The Cloud Layer: The cloud layer is the main central system that ensures storage and processing of collected data and the communication between the different entities of the system. The cloud layer contains a messaging middleware system (Kafka, RabbitMQ) that allows the exchange of messages between data sources and user applications. It can be accessed through different software API and communication protocols, namely MQTT, WebSockets, REST Web Service interfaces, and COAP. The cloud layer also contains big data analytics tools to perform computation and analysis of the collected data and implement advanced machine learning algorithms for the detection of the weevil infestation, and provide useful insights to the farmers.
- The End-User App Layer: The end-user applications layer contains the mobile and web applications that allow users to remotely monitor the status of the their farms in real time. A user-friendly dashboard provides the users with a comprehensive view about the state of their farms, namely the number and location of infected palms, insight on the propagation of the infestation over time, in addition to the vial data for the palms. The user can select information for a particular palm either historical or in real time. He can also display information about the whole farm and particular clusters.
3.2. Software Architecture
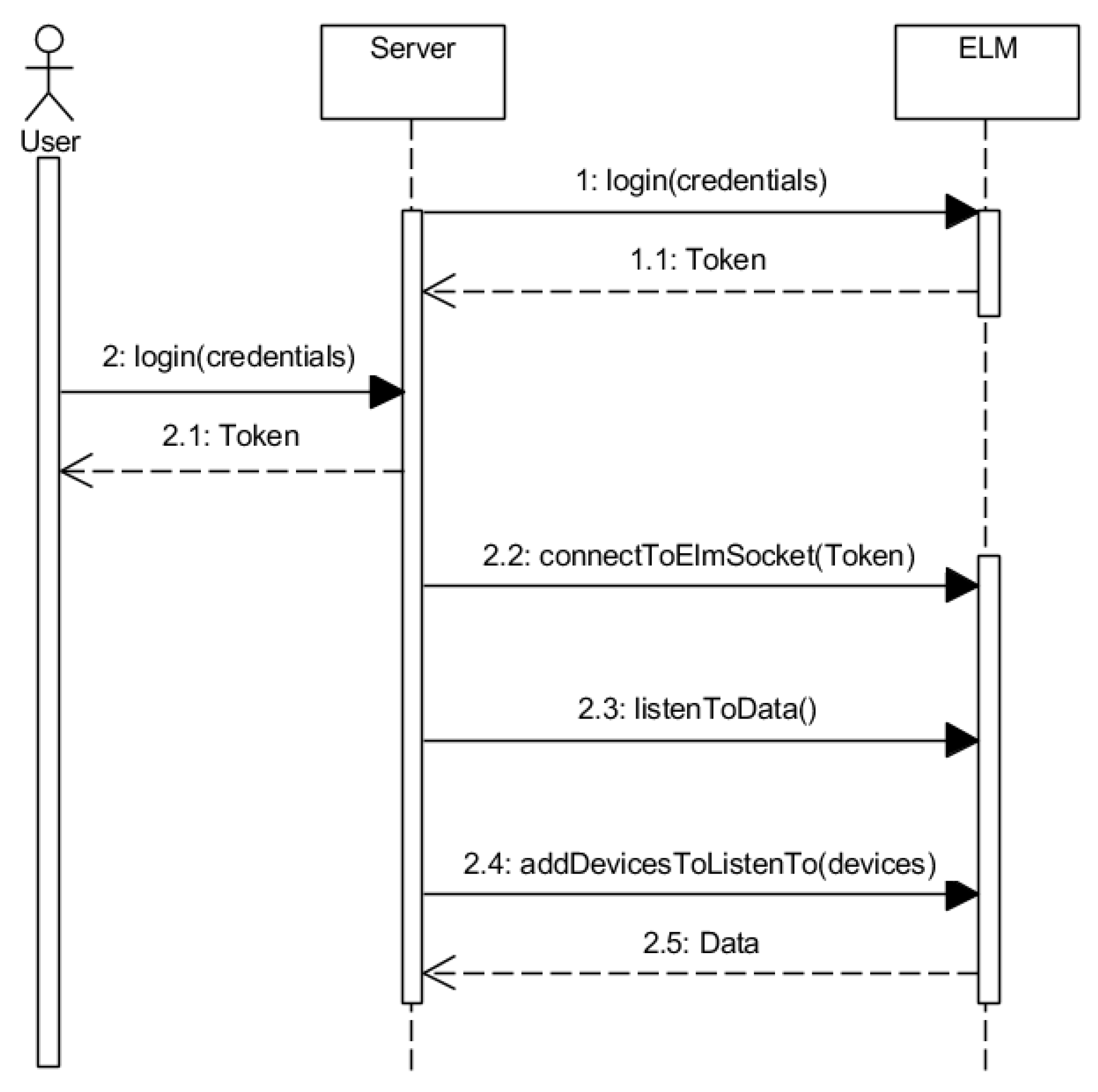
3.2.1. Software Component Flow Diagram
3.2.2. Data Exchange Protocols
4. Data Collection and Analysis
4.1. Experimental Study
4.1.1. Experimental Settings
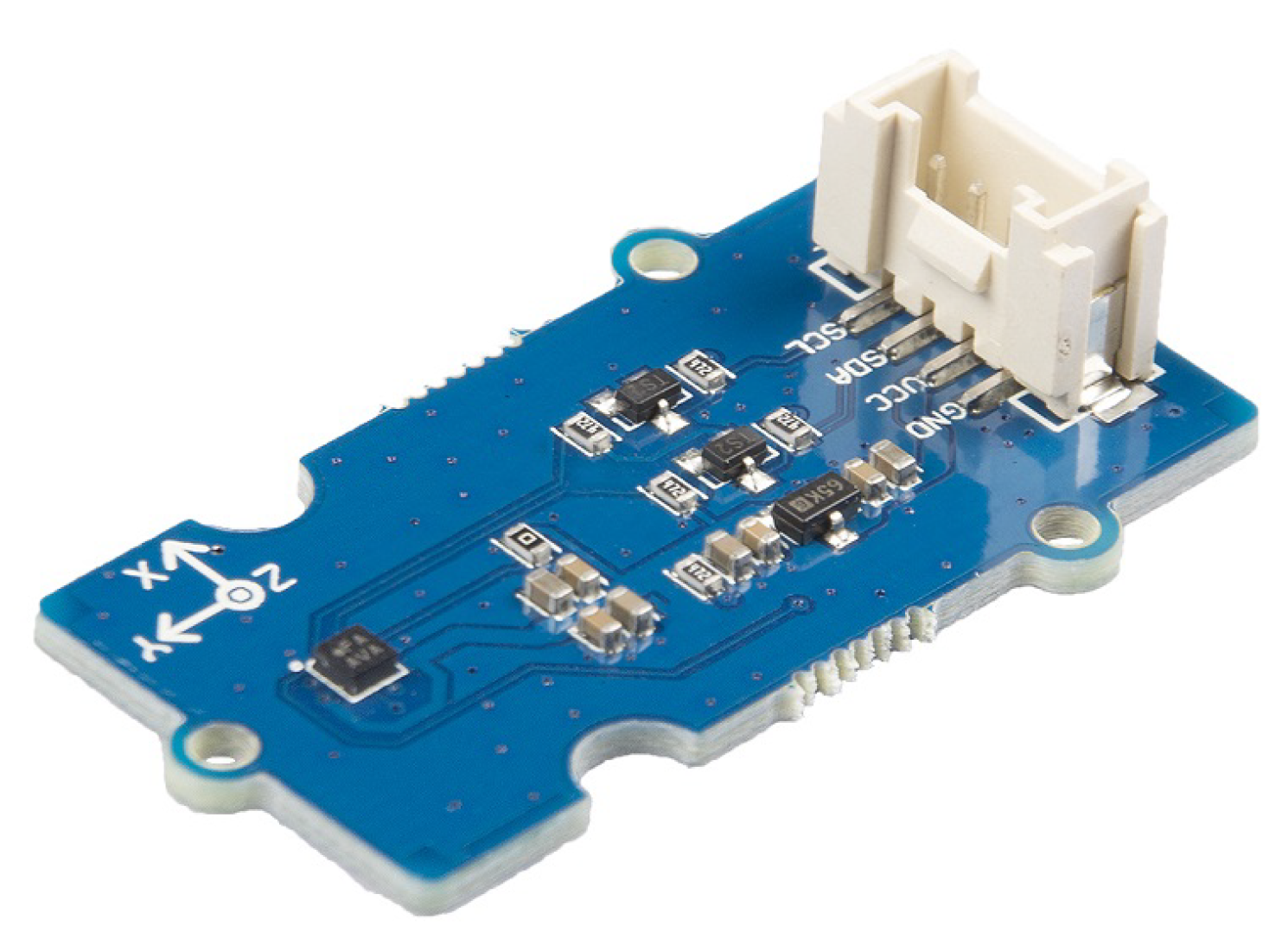
Sensor Selection
Data Collection Process and Scenarios
4.1.2. Performance Metrics
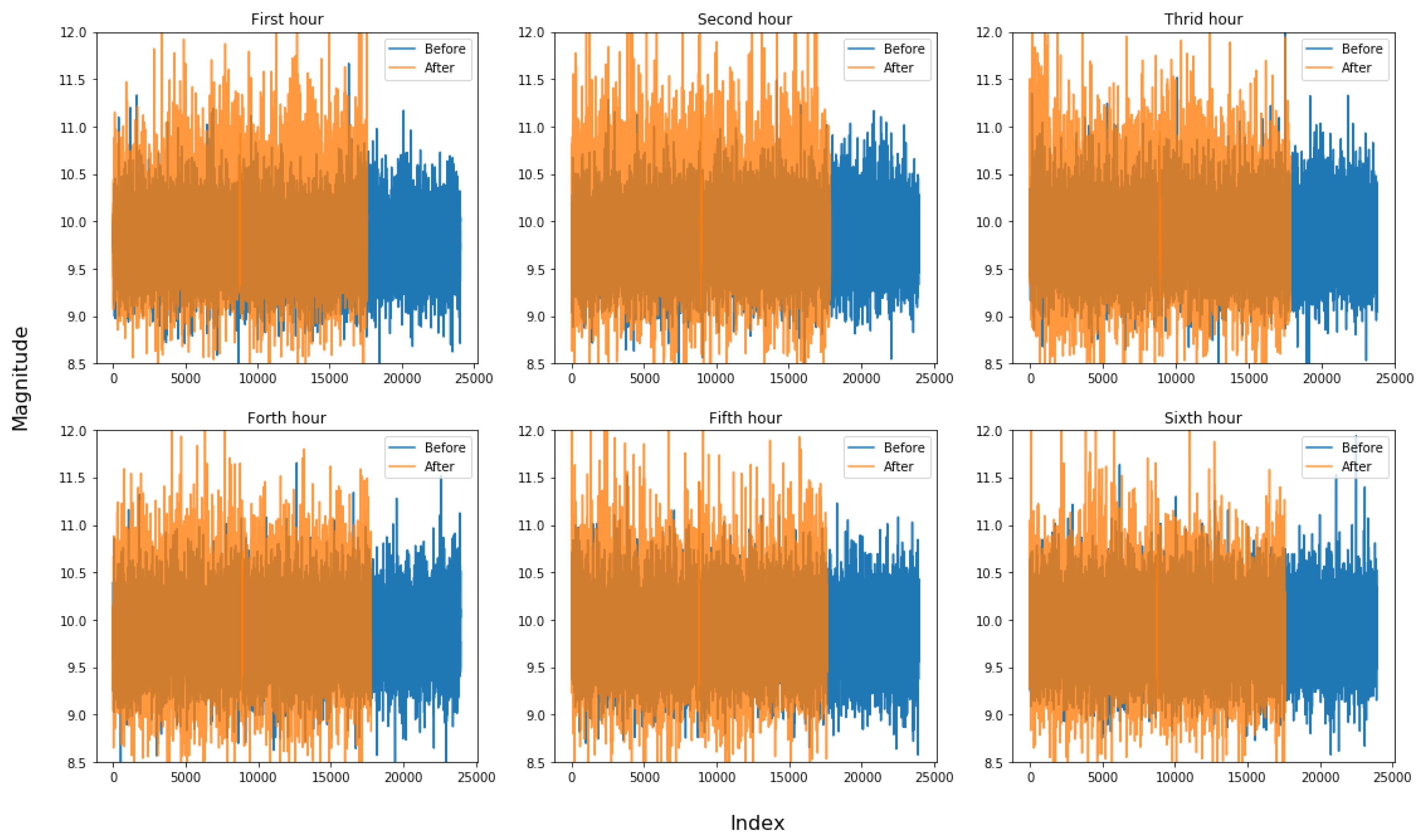
- Signal processing techniques: We used two approaches. The Fast Fourier Transform (FFT), which converts a time series from the time domain to the frequency domain. The objective of this technique is to investigate if the infestation of the palm would lead to different frequencies than in the case of a non-infested palm. Data were sampled at 100Hz. The second approach is the estimation of Power Spectral Density (PSD) using Welch’s method, which is also sampled at 100Hz and 2048-length for each segment. Hanning window was applied on both FFT and PSD to reduce leakage. The average value of the magnitude peaks is calculated based on the normalized threshold equal to 0.6 to evaluate both FFT and PSD plots.
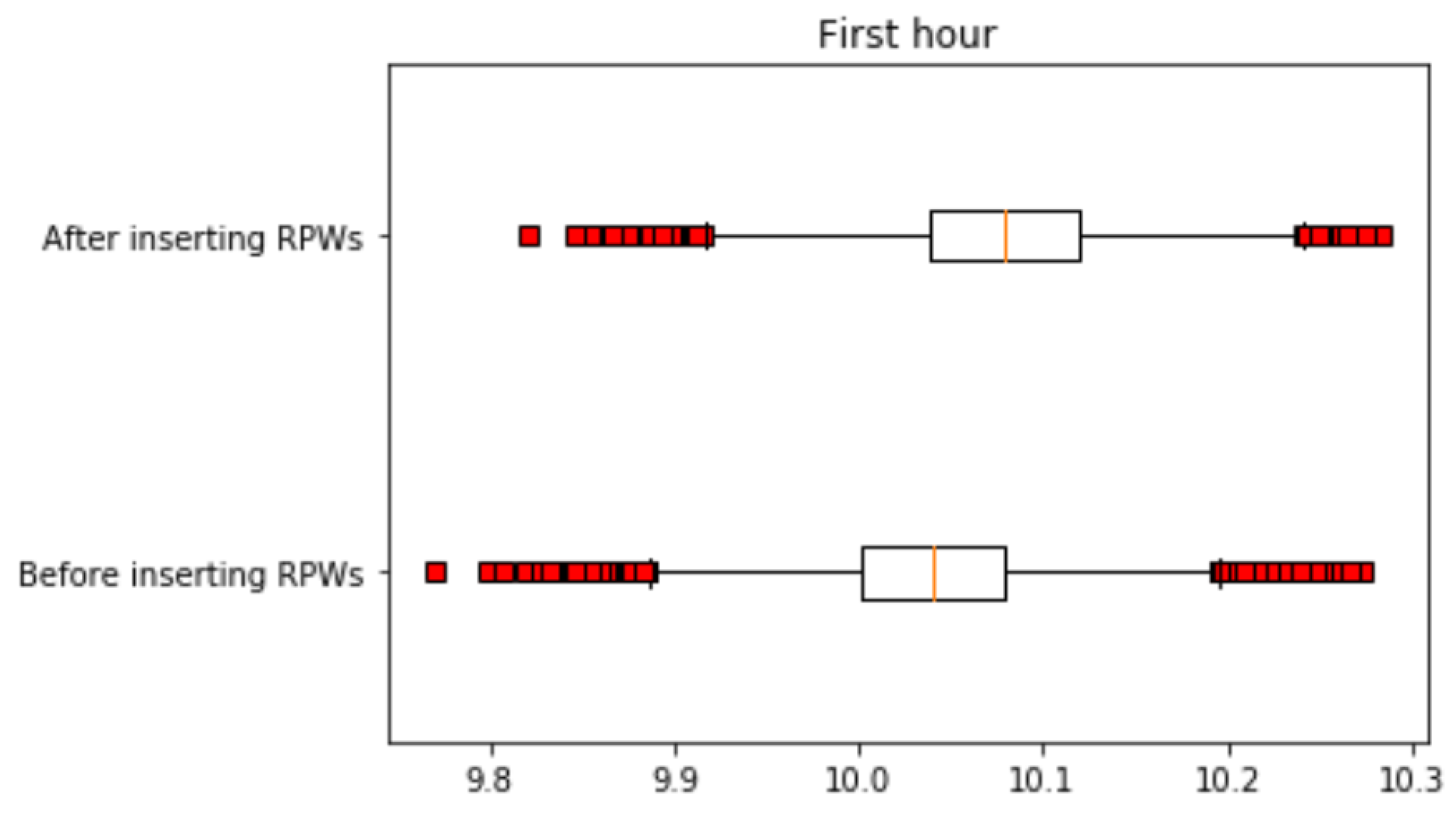
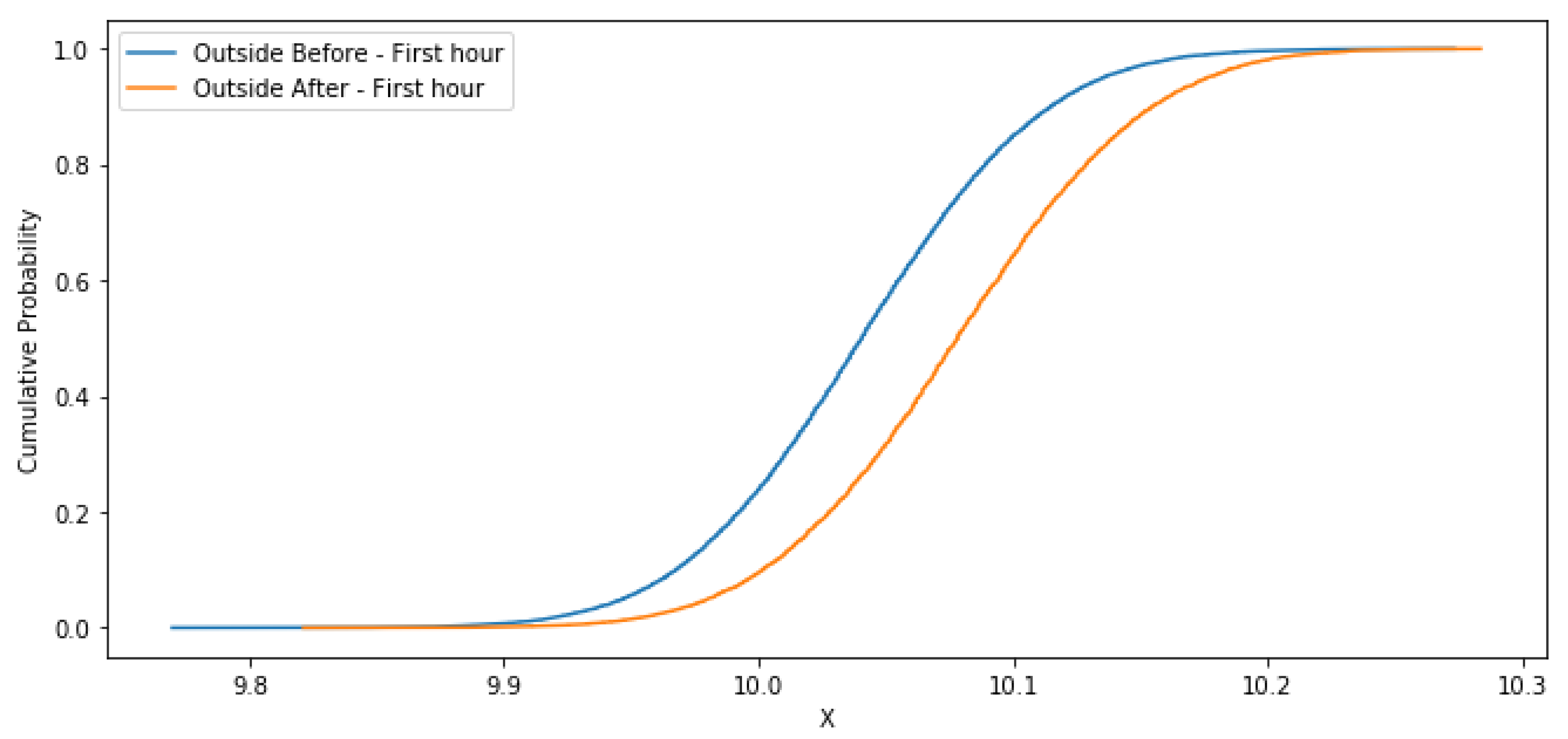
- Statistical techniques: For the statistical techniques, we have considered the box-plot representation, which summarizes six statistical values, namely the maximum and minimum of all the values, the median value, the standard deviation, and the 25% and 75% percentiles. We have also considered the cumulative distribution functions and compared them against each other for different scenarios. Moreover, we have studied the Histogram representation, which provides the implicit distribution of the datasets.
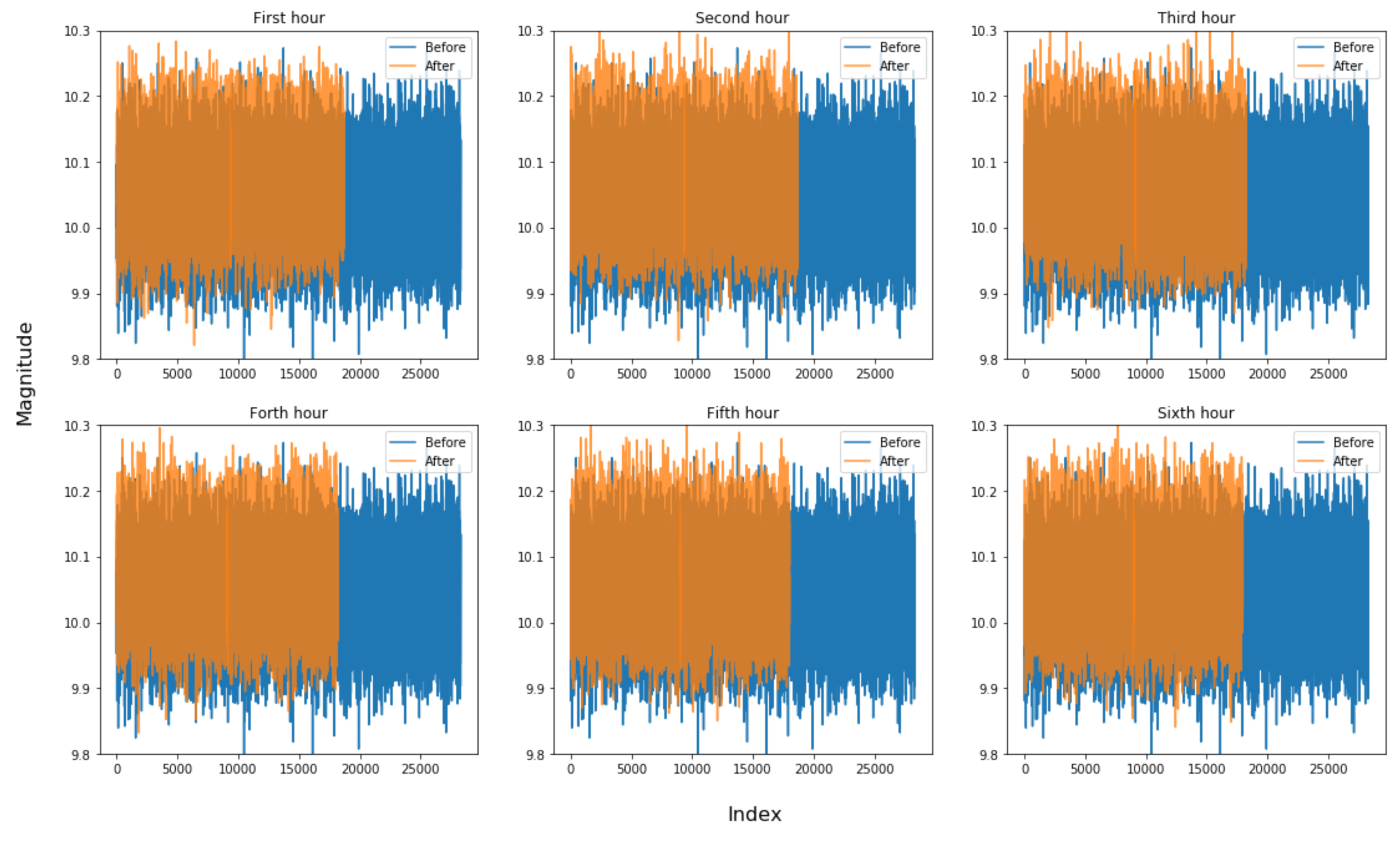
4.2. Results Analysis
4.2.1. Signal Processing Techniques
4.2.2. Statistical Techniques
Statistical Measures
Probability Distributions
Cumulative Distribution Functions
4.3. Lessons Learned
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Red Palm Weevil, Food and Agriculture Organization of the United Nations (FAO). Available online: http://www.fao.org/food-chain-crisis/how-we-work/plant-protection/red-palm-weevil/en/ (accessed on 28 February 2020).
- Mukhtar, M.; Rasool, K.G.; Parrella, M.P.; Sheikh, Q.I.; Pain, A.; Lopez-Llorca, L.V.; Aldryhim, Y.N.; Mankin, R.; Aldawood, A.S. New initiatives for management of red palm weevil threats to historical Arabian date palms. Fla. Entomol. 2011, 94, 733–736. [Google Scholar] [CrossRef] [Green Version]
- El-Sabea, A.M.; Faleiro, J.; Abo-El-Saad, M.M. The threat of red palm weevil Rhynchophorus ferrugineus to date plantations of the Gulf region in the Middle-East: An economic perspective. Outlooks Pest Manag. 2009, 20, 131–134. [Google Scholar] [CrossRef]
- Abraham, V.; Shuaibi, M.A.; Faleiro, J.; Abozuhairah, R.; Vidyasagar, P.S. An integrated management approach for red palm weevil Rhynchophorus ferrugineus Oliv. a key pest of date palm in the Middle East. Sultan Qaboos Univ. J. Sci. Res. Agric. Sci. 1998, 3, 77–84. [Google Scholar] [CrossRef] [Green Version]
- Rajamanickam, K.; Christopher, A.; Kennedy, J. Certain components of integrated management for red palm weevil, Rhynchophorus ferrugineus F. (Curculionidae: Coleoptera) on coconut [in South India]. In Mededelingen; Faculteit Landbouwkundige en Toegepaste Biologische; Wetenschappen Universiteit Gent: Gent, Belgium, 1995. [Google Scholar]
- Faghih, A.A. The biology of red palm weevil, Rhynchophorus ferrugineus Oliv. (Coleoptera, Curculionidae) in Saravan region (Sistan & Balouchistan province, Iran). Appl. Entomol. Phytopathol. 1996, 63, 16–18. [Google Scholar]
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillaor, P. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Huuskonen, J.; Oksanen, T. Soil sampling with drones and augmented reality in precision agriculture. Comput. Electron. Agric. 2018, 154, 25–35. [Google Scholar] [CrossRef]
- Gao, X.; Li, J.; Fan, L.; Zhou, Q.; Yin, K.; Wang, J.; Song, C.; Huang, L.; Wang, Z. Review of Wheeled Mobile Robots’ Navigation Problems and Application Prospects in Agriculture. IEEE Access 2018, 6, 49248–49268. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Hetzroni, A.; Soroker, V.; Cohen, Y. Toward practical acoustic red palm weevil detection. Comput. Electron. Agric. 2016, 124, 100–106. [Google Scholar] [CrossRef]
- Salem, M.S.; Belal, M.H.; Nour, M.E.; Sayed, E.A. Detection of a chemical marker from ovipositing females in Rhynchophorus ferrugineus (Coleoptera: Curculiondae). Adv. Environ. Biol. 2012, 6, 2164–2169. [Google Scholar]
- Rach, M.M.; Gomis, H.M.; Granado, O.L.; Malumbres, M.P.; Campoy, A.M.; Martín, J.J.S. On the design of a bioacoustic sensor for the early detection of the red palm weevil. Sensors 2013, 13, 1706–1729. [Google Scholar] [CrossRef] [PubMed]
- Hussain, A.; Rizwan-ul Haq, M.; Al-Jabr, A.M.; Al-Ayied, H.Y. Managing invasive populations of red palm weevil: A worldwide perspective. J. Food Agric. Environ. 2013, 11, 456–463. [Google Scholar]
- Potamitis, I.; Ganchev, T.; Kontodimas, D. On automatic bioacoustic detection of pests: The cases of Rhynchophorus ferrugineus and Sitophilus oryzae. J. Econ. Entomol. 2009, 102, 1681–1690. [Google Scholar] [CrossRef]
- Mao, Y.; Ashry, I.; Ng, T.K.; Ooi, B.S. Towards Early Detection of Red Palm Weevil using Optical Fiber Distributed Acoustic Sensor. In Proceedings of the 2019 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 3–7 March 2019; pp. 1–3. [Google Scholar]
- Ashry, I.; Mao, Y.; Al-Fehaid, Y.; Al-Shawaf, A.; Al-Bagshi, M.; Al-Brahim, S.; Ng, T.K.; Ooi, B.S. Early detection of red palm weevil using distributed optical sensor. Sci. Rep. 2020, 10, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Nakash, J.; Osem, Y.; Kehat, M. A suggestion to use dogs for detecting red palm weevil (Rhynchophorus ferrugineus) infestation in date palms in Israel. Phytoparasitica 2000, 28, 153–155. [Google Scholar] [CrossRef]
- Faleiro, J.; Kumar, J.A. A rapid decision sampling plan for implementing area–wide management of the red palm weevil, Rhynchophorus ferrugineus, in coconut plantations of India. J. Insect Sci. 2008, 8, 15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giovino, A.; Bertolini, E.; Fileccia, V.; Al Hassan, M.; Labra, M.; Martinelli, F. Transcriptome analysis of Phoenix canariensis Chabaud in response to Rhynchophorus ferrugineus Olivier attacks. Front. Plant Sci. 2015, 6, 817. [Google Scholar] [CrossRef] [Green Version]
- Farooq, W.; Rasool, K.; Tawfik, W.; Aldawood, A. Application of Laser Induced Breakdown Spectroscopy in Early Detection of Red Palm Weevil: (Rhynchophorus ferrugineus) Infestation in Date Palm. Plasma Sci. Technol. 2015, 17, 948. [Google Scholar] [CrossRef]
- Kemsley, E.K.; Tapp, H.S.; Binns, R.; Mackin, R.O.; Peyton, A.J. Feasibility study of NIR diffuse optical tomography on agricultural produce. Postharvest Biol. Technol. 2008, 48, 223–230. [Google Scholar] [CrossRef]
- Ahmed, A.; Ibrahim, A.; Hussein, S. Detection of palm tree pests using thermal imaging: A review. In Machine Learning Paradigms: Theory and Application; Springer: Berlin/Heidelberg, Germany, 2019; pp. 253–270. [Google Scholar]
- Abdullah, M. Biological control of the red palm weevil, Rhynchophorus ferrugineus (Olivier) (Coleoptera: Curculionidae) by the parasitoid mite, Rhynchopolipus rhynchophori (Ewing) (Acarina: Podapolipidae). J. Egypt. Soc. Parasitol. 2009, 39, 679–686. [Google Scholar]
- Tofailli, K. The early detection of red palm weevil: A new method. Acta Hortic. 2010, 882, 441–450. [Google Scholar] [CrossRef]
- Soroker, V.; Suma, P.; Pergola, A.L.; Cohen, Y.; Alchanatis, V.; Golomb, O.; Goldshtein, E.; Hetzroni, A.; Galazan, L.; Kontodimas, D. Early detection and monitoring of red palm weevil: Approaches and challenges. In Proceedings of the Colloque méditerranéen sur les Ravageurs des Palmiers, Association Française de Protection des Plantes (AFPP), Nice, France, 16–18 January 2013. [Google Scholar]
- Gutiérrez, A.; Ruiz, V.; Moltó, E.; Tapia, G.; del Mar Téllez, M. Development of a bioacoustic sensor for the early detection of Red Palm Weevil (Rhynchophorus ferrugineus Olivier). Crop Prot. 2010, 29, 671–676. [Google Scholar] [CrossRef]
- Potamitis, I.; Ganchev, T.; Fakotakis, N. Automatic bioacoustic detection of Rhynchophorus ferrugineus. In Proceedings of the 2008 16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; pp. 1–4. [Google Scholar]
- Walid Barakat, H.; Mohamed Ahmed, H.; Becker, T. Application of the signal processing technology in the detection of Red Palm Weevil. In Proceedings of the 2009 17th European Signal Processing Conference, Glasgow, Scotland, UK, 24–28 August 2009; pp. 1597–1601. [Google Scholar]
- Smart Palm Video Demonstration. Available online: https://youtu.be/qnniODMK3xc (accessed on 28 February 2020).
- Elm Company. 2020. Available online: https://elm.sa/en (accessed on 24 February 2020).
- Grove—3-Axis Digital Accelerometer ±16g Ultra-Low Power (BMA400). 2019. Available online: http://wiki.seeedstudio.com/Grove-3-Axis_Digital_Accelerometer%C2%B116g_Ultra-low_Power-BMA400/ (accessed on 4 July 2019).
- Grove—Piezo Vibration Sensor. 2019. Available online: http://wiki.seeedstudio.com/Grove-Piezo_Vibration_Sensor/ (accessed on 4 July 2019).
- Koubâa, A.; Qureshi, B.; Sriti, M.F.; Allouch, A.; Javed, Y.; Alajlan, M.; Cheikhrouhou, O.; Khalgui, M.; Tovar, E. Dronemap Planner: A service-oriented cloud-based management system for the Internet-of-Drones. Ad Hoc Netw. 2019, 86, 46–62. [Google Scholar] [CrossRef]
- Koubaa, A.; Qureshi, B.; Sriti, M.F.; Javed, Y.; Tovar, E. A service-oriented Cloud-based management system for the Internet-of-Drones. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2017; pp. 329–335. [Google Scholar] [CrossRef] [Green Version]
- Koubaa, A.; Qureshi, B. DroneTrack: Cloud-Based Real-Time Object Tracking Using Unmanned Aerial Vehicles Over the Internet. IEEE Access 2018, 6, 13810–13824. [Google Scholar] [CrossRef]
- Ammar, A.; Koubaa, A. Deep-Learning-based Automated Palm Tree Counting and Geolocation in Large Farms from Aerial Geotagged Images. arXiv 2020, arXiv:2005.05269. Available online: https://arxiv.org/abs/2005.05269 (accessed on 8 July 2020).
- Cheikhrouhou, O.; Koubaa, A.; Boujelben, M.; Abid, M. A lightweight user authentication scheme for wireless sensor networks. In Proceedings of the ACS/IEEE International Conference on Computer Systems and Applications-AICCSA 2010, Hammamet, Tunisia, 16–19 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–7. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Operating Voltage | 3.3V/5V |
| Power Consumption | 18uA @5 V 14uA @3.3 V |
| Operating Temperature | −40 ℃ ∼ +85 ℃ |
| Acceleration Range | ±2 g, ±4 g, ±8 g, ±16 g |
| Sensitivity | 1024LSB/g @±2 g 512LSB/g @±4 g 256LSB/g @±8 g 128LSB/g @±16 g |
| Interface | I2 C |
| Size | L: 40 mm W: 20 mm H: 10 mm |
| Weight | 3.2 g |
| Package size | L: 140 mm W: 90 mm H: 10 mm |
| Gross Weight | 10 g |
| Location | Height (cm) | Sensor (s) | Positions | Number of Larvae |
|---|---|---|---|---|
| 1 | 35 | BMA400 | Inside, Outside | 4 |
| 2 | 20 | BMA400 | Outside | 2 |
| Data-Set | Sample Size | Mean | Standard Deviation | Median | Minimum | 25th Percentile | 50th Percentile | 75th Percentile | Maximum | Duration (in Minutes) |
|---|---|---|---|---|---|---|---|---|---|---|
| Outside sensor before insertion | 28,299 | 10.04 | 0.06 | 10.04 | 9.77 | 10.00 | 10.04 | 10.08 | 10.27 | 60 |
| Outside sensor after insertion | 18,712 | 10.08 | 0.06 | 10.08 | 9.82 | 10.04 | 10.08 | 10.12 | 10.28 | 60 |
| Inside sensor before insertion | 24,077 | 9.74 | 0.25 | 9.73 | 8.29 | 9.58 | 9.73 | 9.89 | 11.67 | 60 |
| Inside sensor after insertion | 17,614 | 9.94 | 0.37 | 9.93 | 8.20 | 9.71 | 9.93 | 10.15 | 12.64 | 60 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koubaa, A.; Aldawood, A.; Saeed, B.; Hadid, A.; Ahmed, M.; Saad, A.; Alkhouja, H.; Ammar, A.; Alkanhal, M. Smart Palm: An IoT Framework for Red Palm Weevil Early Detection. Agronomy 2020, 10, 987. https://doi.org/10.3390/agronomy10070987
Koubaa A, Aldawood A, Saeed B, Hadid A, Ahmed M, Saad A, Alkhouja H, Ammar A, Alkanhal M. Smart Palm: An IoT Framework for Red Palm Weevil Early Detection. Agronomy. 2020; 10(7):987. https://doi.org/10.3390/agronomy10070987
Chicago/Turabian StyleKoubaa, Anis, Abdulrahman Aldawood, Bassel Saeed, Abdullatif Hadid, Mohanned Ahmed, Abdulrahman Saad, Hesham Alkhouja, Adel Ammar, and Mohamed Alkanhal. 2020. "Smart Palm: An IoT Framework for Red Palm Weevil Early Detection" Agronomy 10, no. 7: 987. https://doi.org/10.3390/agronomy10070987